点汇聚系统的设计概要与应用展望
2020-07-09刘博文张军峰朱昶歆马林南
刘博文,胡 荣,张军峰,朱昶歆,马林南
(1. 南京航空航天大学民航学院,江苏 南京211106;2. 中国民用航空局空中交通管理局空域管理中心,北京101300)
目前,在繁忙的空中交通流下,空中交通管制员通常使用开环雷达引导方式指挥航空器运行,但是在高交通负荷条件下,这种工作方式会显著增加管制员在终端控制区(terminal control area,TMA)的指令数,使得频率占用时间增加、飞行员遵循管制指令的情景意识下降,进而可能增加航班延误与安全风险,并产生额外的燃油消耗、 废气排放与噪声污染。 为缓解开环运行方式的不利影响, 欧洲控制实验中心(EUROCONTROL)于2006 年率先提出了新的运行概念——点汇聚系统(point merge system,PMS)。 PMS 作为一种更高效的系统化的航空器进近飞行程序,受到了国内外诸多研究机构与人员的关注,并在欧洲、亚洲、非洲及南美洲多个机场开展了模拟验证与运行实践,实施效果良好,证明PMS 在终端区具有很高的运行效益与环境效益[1]。
为厘清点汇聚系统设计过程中的关键要素,进一步推动点汇聚系统的设计、应用与发展,本文对点汇聚系统的设计概要、应用与发展进行系统梳理,在点汇聚系统实施案例分析的基础上,梳理点汇聚系统的构成要素、设计参数,并对比不同案例的设计参数与应用成效;最后,立足当前终端区日趋复杂的环境及日新月异的新技术,展望点汇聚系统的未来发展趋势。
1 点汇聚系统概念与实践
1.1 点汇聚系统的概念
点汇聚系统是EUROCONTROL 率先提出的一种对航空器到达流进行系统管理的飞行程序。 该系统基于区域导航的航路设计,通过在距离中心汇聚点等距离处,使用排序弧来缩短或拉伸路径。 这一设计理念结合了区域导航程序和连续下降技术优势,改变了以往雷达管制的开环航向引导,采用闭环直飞汇聚点指令,进而改进和标准化终端空域操作[2]。 这就可以保证相较于雷达开环引导,点汇聚系统的飞机水平轨迹更为一致、规整,航迹的复现性更好(图1 给出了奥斯陆国际机场点汇聚系统和雷达开环引导的地面轨迹对比图)[3]。
PMS 基于特定的航路结构,由一个点(汇聚点)和与该点等距(垂直分离)的排序弧组成。 典型的PMS 航路结构如图2 所示。
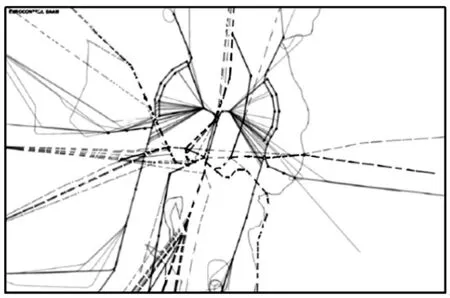
图1 PMS(实线)和雷达开环引导(虚线)轨迹对比图Fig.1 Comparison of PMS (solid line) and radar openloop guidance (dotted line) trajectories
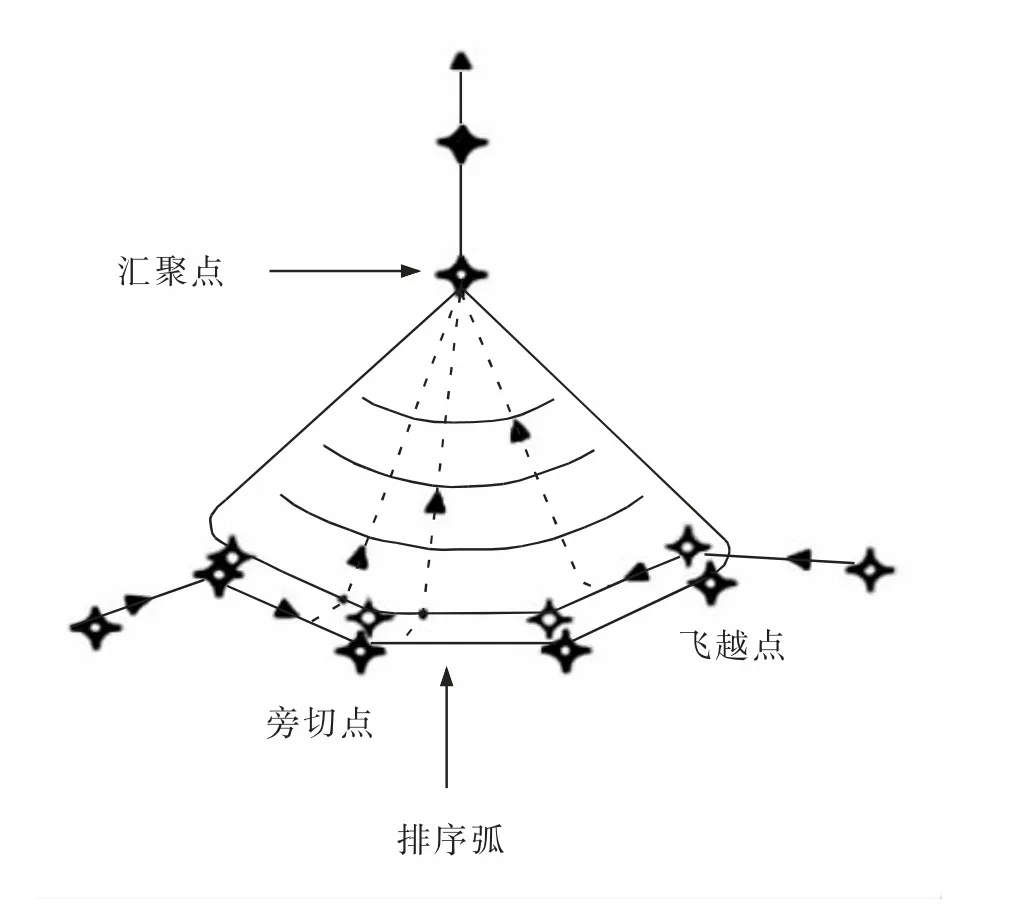
图2 典型PMS 航路结构示意图Fig.2 Typical PMS route structure
完整的点汇聚系统通常包括如下3 个构成要素:
汇聚点:是终端区内的一个物理坐标点,用于对不同方向的交通流进行汇聚整合,形成一个航班流。 航空器通过该点之后,完成排序工作,随后沿着统一路径飞行直至离开PMS[4]。
排序弧:是近似圆弧的一段预设航段,圆心为汇聚点,因此航段中各点距汇聚点距离近似相等。 排序弧是一种创新的线性保持模式,而不是传统的堆栈保持模式,因而它能够轻松适应终端区中不同流量。在低流量期间,其排序弧可以更短;在高流量期间,其排序弧可以更长,这种结构非常适合处理动态交通流。航空器飞行在排序弧上的任意时刻,都可以被管制员引导直飞(direct to)到汇聚点[1]。
定位点:根据所处位置可划分为排序弧上定位点与排序弧末端定位点。 排序弧上定位点通常定义为旁切点,用于协助管制员确定航空器间的间隔或预设转弯直飞点;排序弧末端定位点通常定义为飞越点,其后衔接一条延伸航段用于特殊情况(如通讯失效)下的航空器自主直飞程序[1]。
1.2 点汇聚系统的实践
点汇聚系统自其概念提出以来,得到了相关机构与机场的关注,随着关于PMS 设计与研究的不断深入,全球不少机场已成功实施了PMS。 表1 给出了PMS 已经实施或者确定将要实施的主要机场信息。
自2011 年挪威奥斯陆国际机场首次正式实施点汇聚系统以来,实施的机场数量持续增加,这些机场分布在欧洲、亚洲、南美洲及非洲等多个区域,并取得了涵盖运行安全、管制员负荷、终端区容量及环境影响等多方面在内的良好的运行成效。
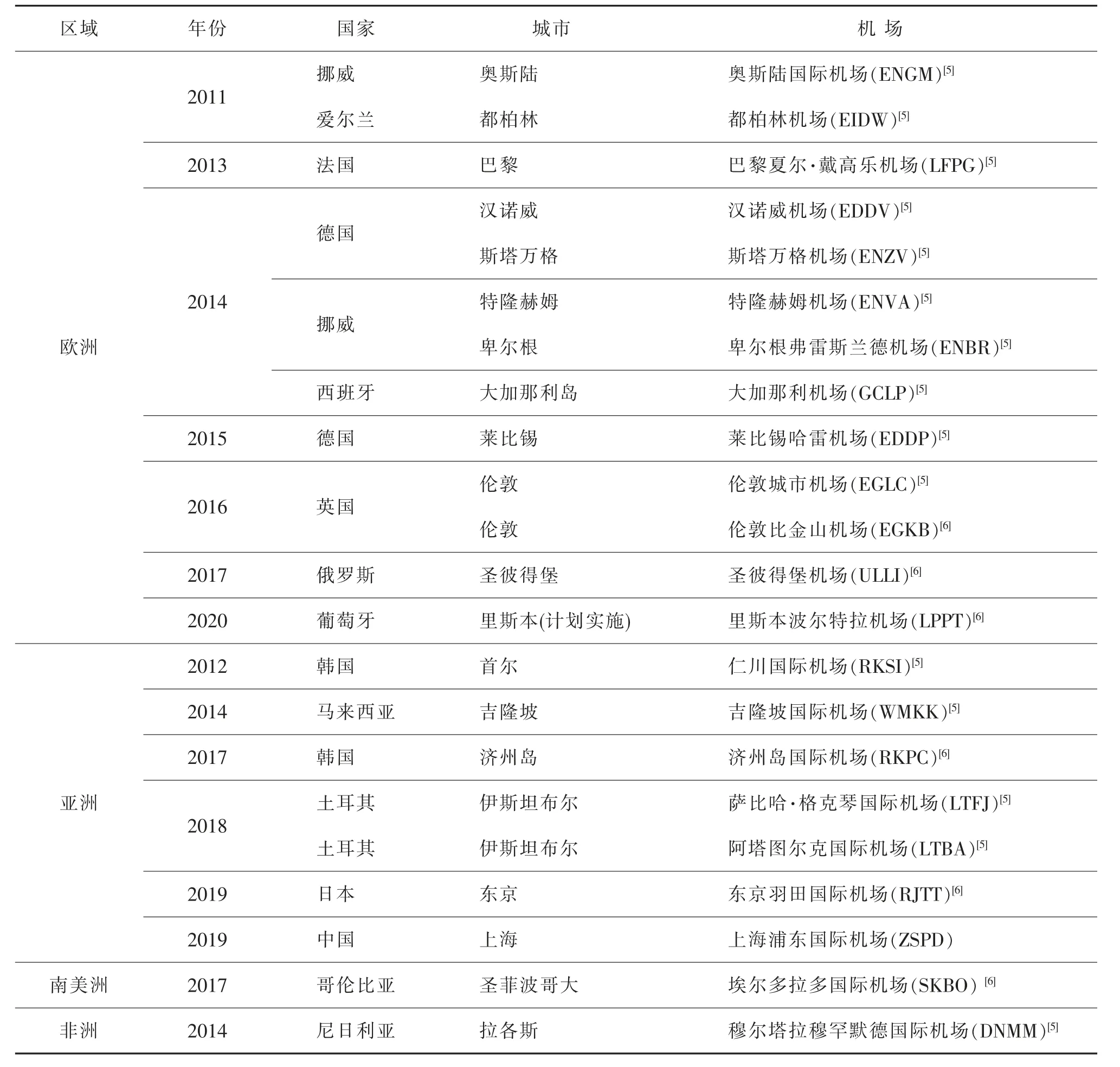
表1 PMS 实施信息汇总表Tab.1 Summary of PMS implementation information
1.3 点汇聚系统的优势
根据国内外对PMS 系统的理论研究和各机场的实施效果,可以发现PMS 主要有以下两点突出优势:
1) 简化了管制员工作:实施PMS 能显著减少管制员的指令数,进而减少管制员的工作量、降低工作频率和无线电话信道占用率,并且能增加管制员的情景意识。 基于此,能有效提高终端区内航空器的运行安全性。
2) 实现了标准化运行:实施PMS 使管制员之间的工作分工更加明确合理,工作方法更加标准化;减少了航空器在进近过程中的飞行距离,优化了下降剖面,使其水平轨迹更加集中。
同时,通过标准化运行,可以广泛地应用RNAV 和使用FMS 横向制导,提高飞行效率和可预测性;高峰期充分利用机场的可用跑道容量,并具有能力满足未来的跑道容量增长;可以实施连续下降,最大限度地减少二氧化碳、氮氧化合物和硫化物等污染物排放,缓解机场周边区域的噪声影响。
当然,PMS 具有上述优点的同时也存有若干不足,诸如PMS 对垂直剖面具有较高的敏感度,需要考虑与现有机场接收条件的兼容性;二次到达流排序的直观性有待提升[9];在高密度交通量的情况下,管制员需要使用辅助决策工具来提高其对PMS 的控制能力[10-11],等。
2 点汇聚系统的设计概要
典型的点汇聚系统运行主要包括两个核心步骤(见图2)。
1) 航空器在排序弧航段上自主飞行时,管制员在发现当前航空器与前一航空器间隔达到间隔要求时,对该航空器发出“直飞(direct to)”指令,航空器直飞向汇聚点。
2) 航空器离开排序弧后开始下降,并通过速度控制保持前后航空器之间的安全间隔。
为了有效保证航空器在点汇聚系统中完成上述运行步骤,需要对汇聚点、排序弧、定位点等构成要素进行科学的设计。 PMS 的设计参数主要包括高度、速度、角度和距离4 类。
2.1 高度
高度是指PMS 相关构成要素的修正海平面气压高度(如图3)。 通常有如下推荐要求:
1) 排序弧:排序弧高度一般在3 048~3 657 m[12],且航空器在排序弧上飞行时无高度变化。 由于来自外部排序弧的航空器接到“直飞”指令后将穿过内部排序弧,为避免冲突,内外排序弧应保持305 m 的垂直距离,且靠近汇聚点的排序弧往往赋予高高度。
2) 汇聚点:汇聚点高度一般在1 219~1 829 m[12]。
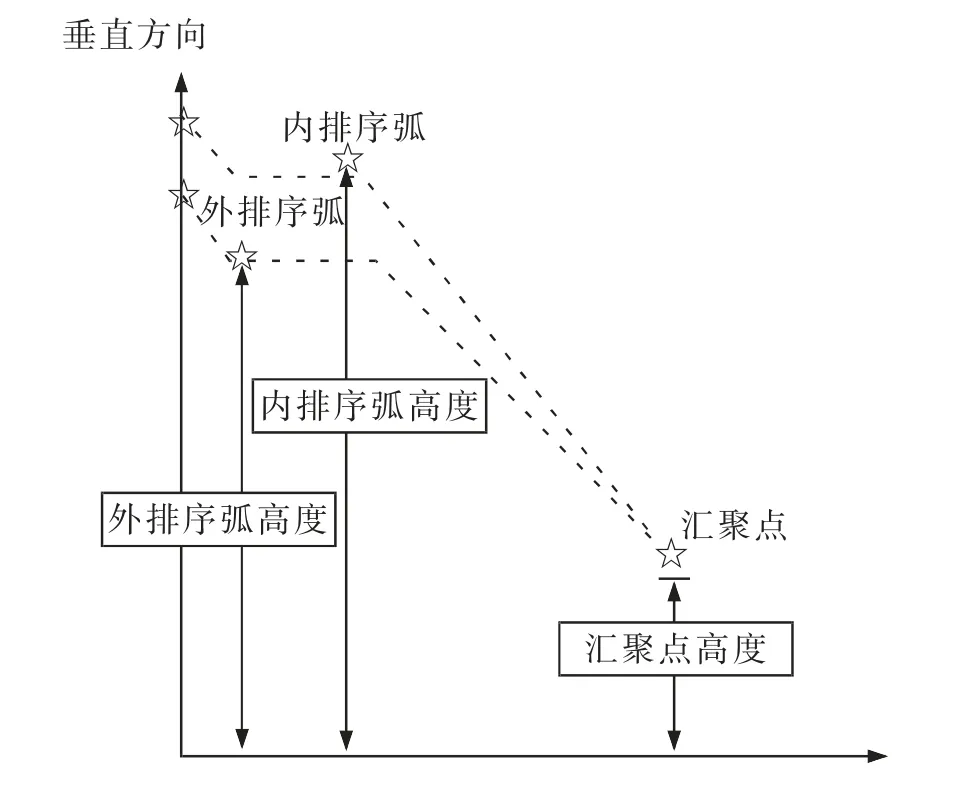
图3 PMS 垂直剖面示意图Fig.3 Vertical section of PMS
2.2 速度
速度通常指航空器在PMS 排序弧上及 (或)过汇聚点的指示空速。 通常有如下推荐要求:
1) 航空器在排序弧上以固定速度飞行,一般为407~426 km/h。
2) 在排序弧各航空器应保持尽量一致的飞行速度,这可以确保高流量条件下,各航空器具备相同距离时间比,以提升PMS 运行效能。
3) 航空器过汇聚点的速度一般需低于其在排序弧上飞行的速度,以保证能够较好地衔接后续飞行航段。
2.3 角度
角度可分为两种类型: 一个是与航空器飞行轨迹相关,另一个是与点汇聚系统覆盖范围相关。
与航空器飞行轨迹相关包含3 种角度: 点汇聚进入航迹变化角α、点汇聚直飞航迹变化角β 与点汇聚退出航迹变化角γ。
与PMS 覆盖范围相关包括1 种角度:点汇聚区域包围角δ。 具体如图4 所示。
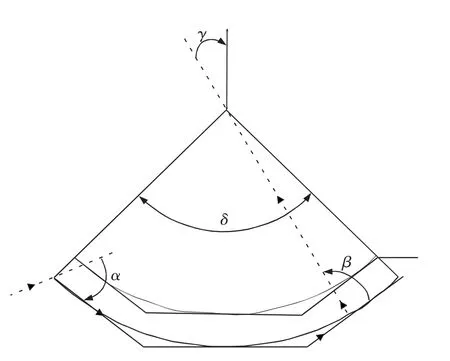
图4 PMS 平面角度示意图Fig.4 Angles of PMS
PMS 角度通常有如下推荐设计要求:
1) 进入航迹变化角α:主要由区域导航程序设计要求确定,应尽可能小于90°。
2) 直飞航迹变化角β:通常在90°左右。
3) 退出航迹变化角γ:主要由区域导航程序设计要求确定,且尽可能小于90°。
4) 区域包围角δ: 与排序弧-汇聚点之间的距离以及排序弧的长度相关, 设计时应避免过大。 在极端情况下(δ=180°),可能导致管制自动化系统的短期冲突告警(STCA),如图5 所示。
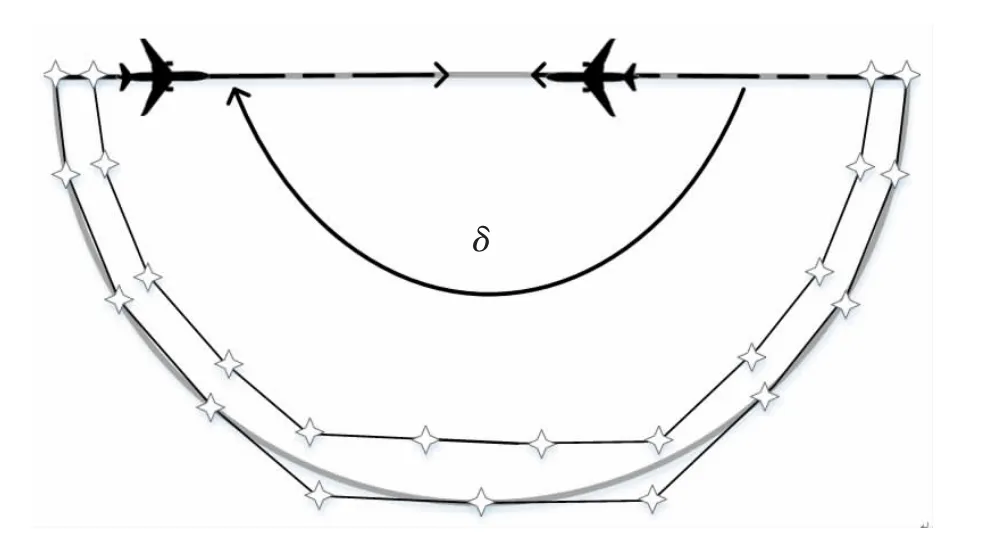
图5 过大的区域包围角δ 示意图Fig.5 Oversized convergence angle δ
2.4 距离
距离通常包括排序弧的长度以及不同排序弧之间、排序弧与汇聚点之间的水平间隔长度。 通常有如下推荐要求:
1) 内外相邻排序弧之间的距离至少为3 704 m。
2) 汇聚点与外排序弧之间的距离至少为37 040 m。
3) 排序弧长度通常根据特定机场的空域结构、交通流量等因素确定;一般不少于37 040 m,以使其具有足够的航空器吸纳能力。
上述4 个设计参数的推荐值只是作为PMS 的设计参考值, 实际应用时需结合具体机场空域结构与限制条件加以确定,最终数值会稍有变化。
3 点汇聚系统的设计应用
当前,全球已有4 个大洲、近20 个机场实施运行了点汇聚系统,并有1 个机场确定于2020 年实施运行。 在梳理相关机场的参数设计数值的基础上,进一步探讨各类设计参数对点汇聚系统的设计、运行、成效等影响。
3.1 高度
高度是点汇聚系统的重要参数,决定了航空器在PMS 中飞行的垂直剖面。 表2 给出了若干典型点汇聚系统排序弧、汇聚点的实际高度设置情况。
从表2 可以看出,各机场PMS 排序弧、汇聚点的高度参数设计值存有较大差异,这与各机场实际空域条件密切相关。 通过理论分析并结合上述机场的运行状况,发现:
1) 增加排序弧高度可以使航空器从更高的高度实施连续下降过程,有利于减小噪声影响范围与强度,并可提高飞行效率。
2) 更高的高度也意味着航空器的飞行速度更快,在排序弧长度相同的条件下,会导致PMS 延迟吸纳能力下降。
3) 增加排序弧与汇聚点之间的高度落差,将会提高航空器下降率,这可能引发与航空器性能相关的问题。
4) 汇聚点高度可以是强制高度(如:914 m)也可以是建议高度(如:914 m 以上),具体由后续飞行程序衔接要求确定。
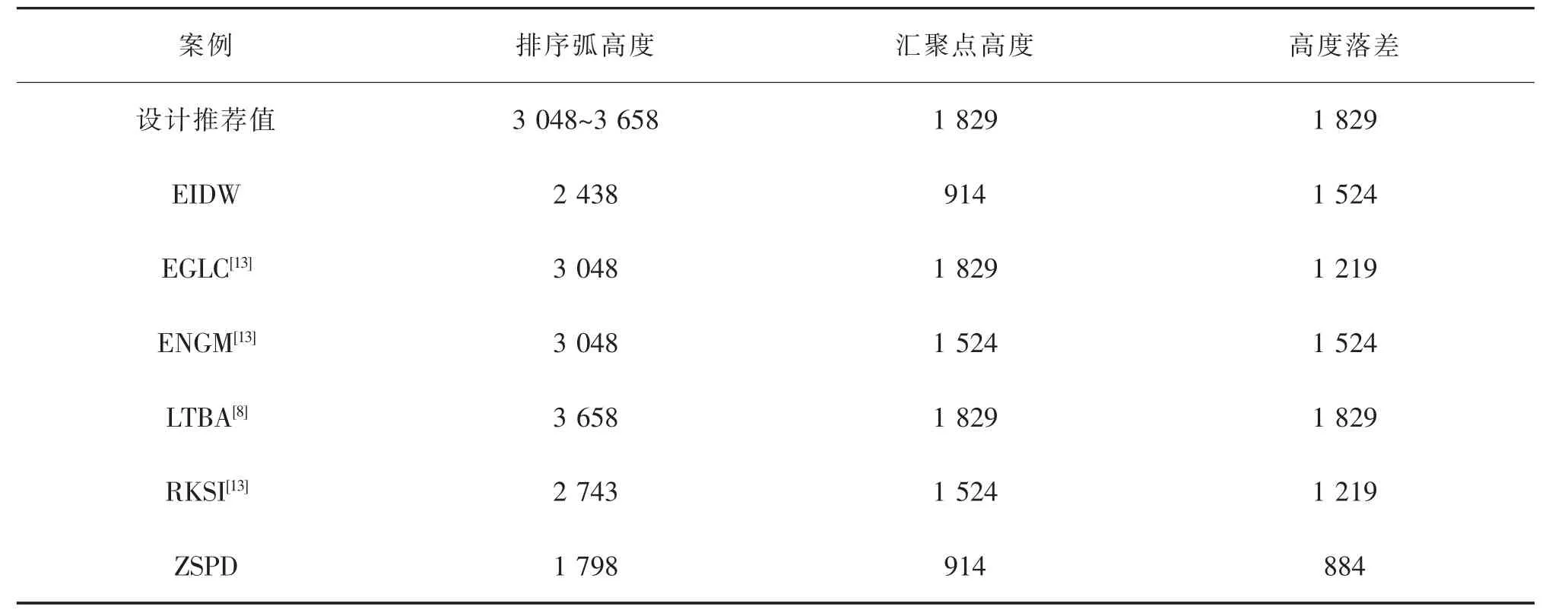
表2 PMS 高度参数设计汇总表Tab.2 Design information of PMS height parameter m
3.2 速度
航空器的运行速度对PMS 的容量产生影响。 表3 给出了若干典型机场点汇聚系统的速度参数信息。
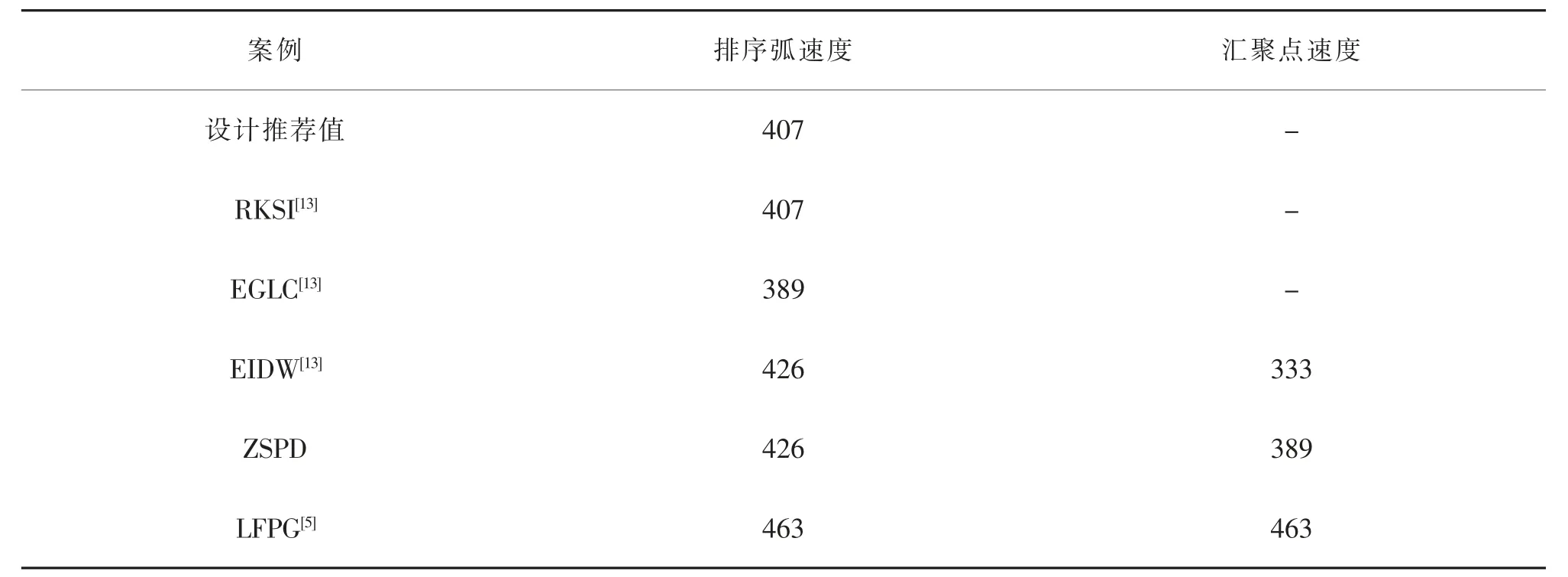
表3 PMS 速度参数设计信息汇总表Tab.3 Design information of PMS speed parameter (km/h)
通过结合其他设计参数的理论分析与上述机场的运行状况,发现:
1) 不同机场的速度参数值有较大的差异, 这与该机场PMS 的排序弧高度、 排序弧与汇聚点的高度落差、排序弧与汇聚点的距离密切相关。一般而言,排序弧高度越高、排序弧与汇聚点的高度落差越小、排序弧与汇聚点的距离越远,则航空器在排序弧上速度越大。
2) 无论速度参数取值多少,排序弧上的飞行速度都是不变的,以保证PMS 的运行效能。
3) 当排序支路长度相同时,航空器的速度越大则点汇聚系统的动态容量越高。
3.3 角度
角度直接影响着点汇聚系统的空域水平覆盖范围及与区域导航程序的衔接质量。通过整理相关机场的航图信息,表4 给出了这些机场的角度汇总信息。
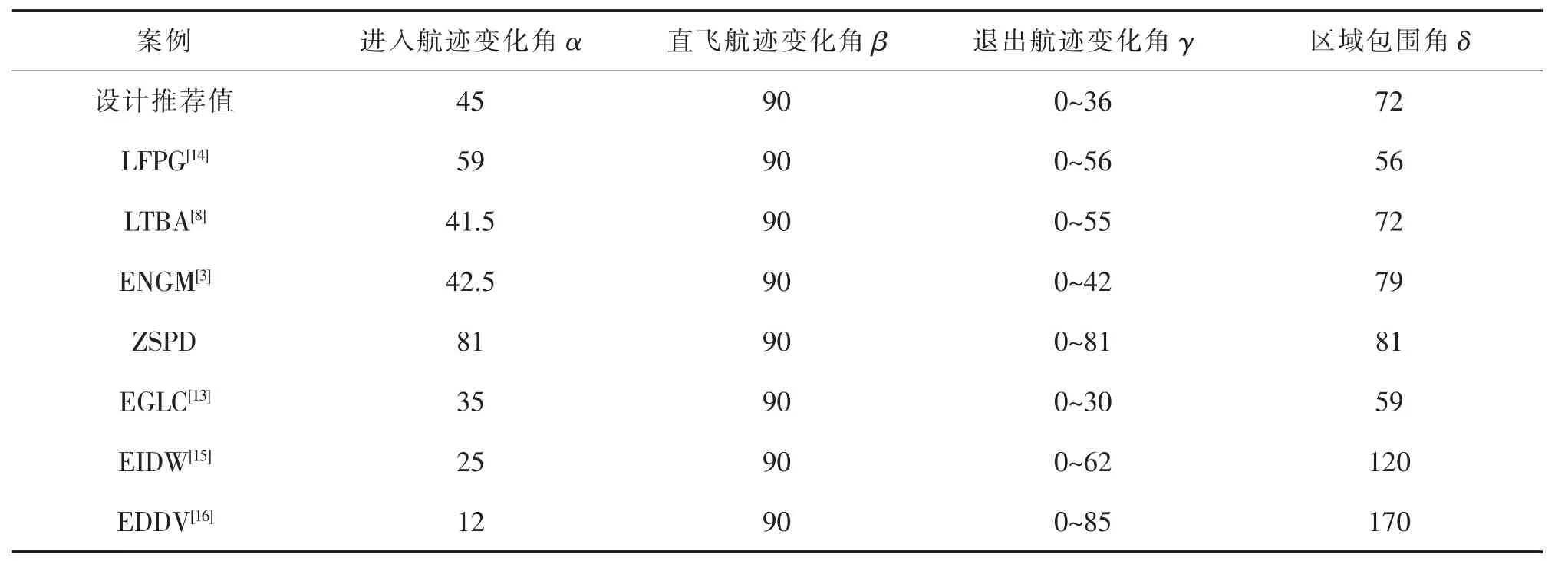
表4 PMS 角度参数设计信息汇总表Tab.4 Design information of PMS angle parameter (°)
通过上述机场的运行情况并结合理论分析,可发现:
1) 进入航迹变化角α 与各机场空域结构、交通流向及进场程序等密切相关,差异很大;同时,考虑到航空器性能(影响航空器转弯半径)、旅客舒适性等要求,α 一般小于90°。
2) 直飞航迹变化角β 的度数几乎都是恒定的(90°)。 这是由于排序弧是一段以汇聚点为圆心的近似圆弧,而β 是由该圆弧切线与半径所包围的。
3) 退出航迹变化角γ 与进入航迹变化角α 类似, 与各机场空域结构、 交通流向及进场程序等密切相关,一般也要求小于90°。
4) 对于某具体的点汇聚系统,退出航迹变化角并不是一个固定值,而是一个变化范围,具体数值与航空器收到“直飞”指令时在排序弧上的位置密切相关。 同时,γ 存在最大值,该最大值由汇聚点所衔接的后续飞行程序决定,一般情况下不超过区域包围角δ 的大小。
5) 区域包围角δ 的各机场差异也很大,这与终端空域条件、空中交通特性、机场运行环境等密切相关。一般而言,δ 越大预示着排序弧越长,点汇聚系统的航空器延迟吸纳能力越强。 但过大的δ 可能导致管制自动化系统的短期冲突告警。
3.4 距离
距离参数对点汇聚系统的空间结构与服务能力有决定性影响。 表5 给出了若干典型机场的距离信息,同时结合表2 的高度信息可以得到各机场PMS 的下降梯度信息。
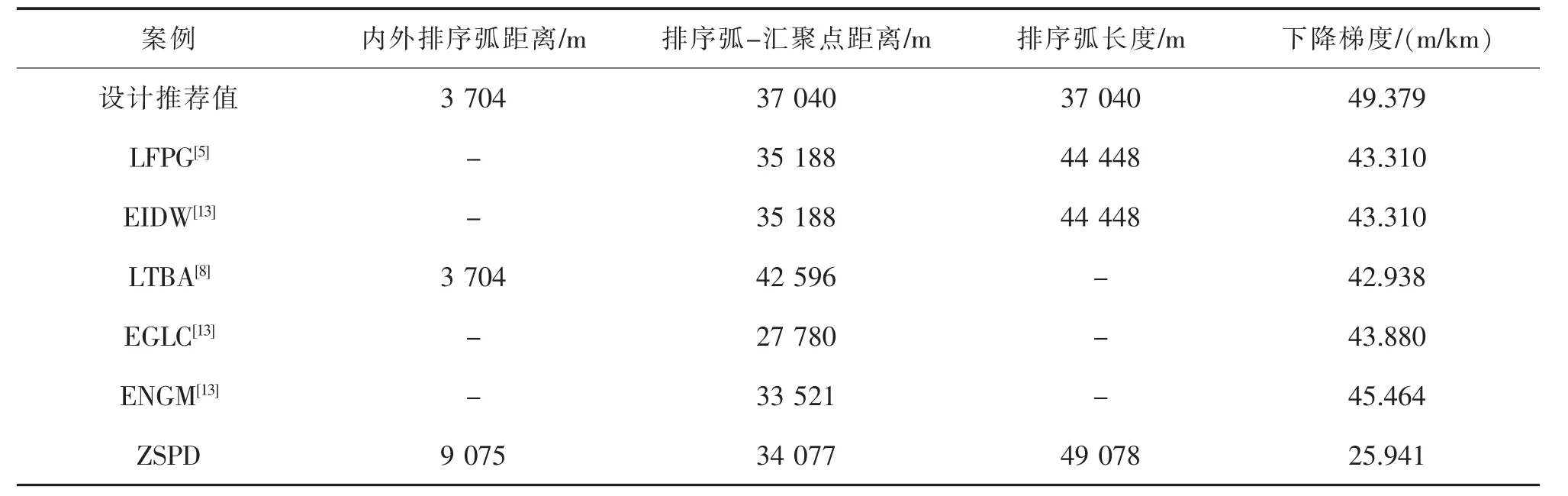
表5 PMS 距离参数设计信息汇总表Tab.5 Design information of PMS distance parameter
通过上述机场的运行情况并结合理论分析,可发现:
1) 增加内外排序弧距离天然地增加了航空器之间的安全间隔;但当PMS 中航空器较多时,也增加了构建着陆序列的难度。
2) 增加排序弧-汇聚点的距离,便于通过速度控制来保持航空器间距,提前构建着陆序列,增加可预测性。
3) 较长的排序弧-汇聚点的距离可能使得着陆序列构建过早,降低了序列更改的灵活性。
4) 增加排序弧长度可提高点汇聚系统的延迟吸纳能力,可以使PMS 容纳更多的航空器。
5) 较长的排序弧长度能增加对风等气象条件的敏感度,容易累积运行中的不确定性。
4 点汇聚系统的未来展望
当前空域条件下,点汇聚系统在提高运行安全性和跑道运行效率等方面都有很大的潜力。 未来随着民航运输需求的持续增长[17],结合民航新技术发展可以在传统的PMS 基础上加以改进与拓展,例如面对更复杂的终端区环境设计一个拓扑结构的PMS,进一步提高终端区运行安全与效率。
4.1 复杂环境下的多层点汇聚系统
鉴于复杂环境下的终端区是一个非常动态的环境,一个小的航空器重新排序动作都可能极大地增加管制员的工作量。 在这种环境下,可以考虑设计在现有点汇聚系统的基础上,设计多层点汇聚系统(multilayer point merge system,ML-PMS)让不同方向的航空器到达定序航段,图6 通过设置两个不同高度的PMS,实现两条独立平行跑道多层点汇聚系统。
当然,根据跑道之间的距离,ML-PMS 还可以如图7 所示在同一内外排序弧上设计两个不同的汇聚点,这种拓扑结构的优点是到港航空器很容易改变跑道。 此外,考虑到特定机场的运行限制,可以设计更复杂的ML-PMS 结构[18],诸如分离的ML-PMS 或混合的ML-PMS[19]。
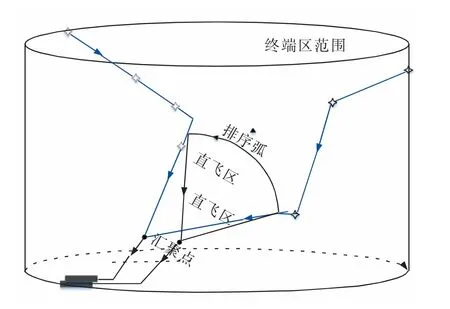
图6 两条平行跑道的ML-PMS 示意图Fig.6 Two parallel runways of ML-PMS
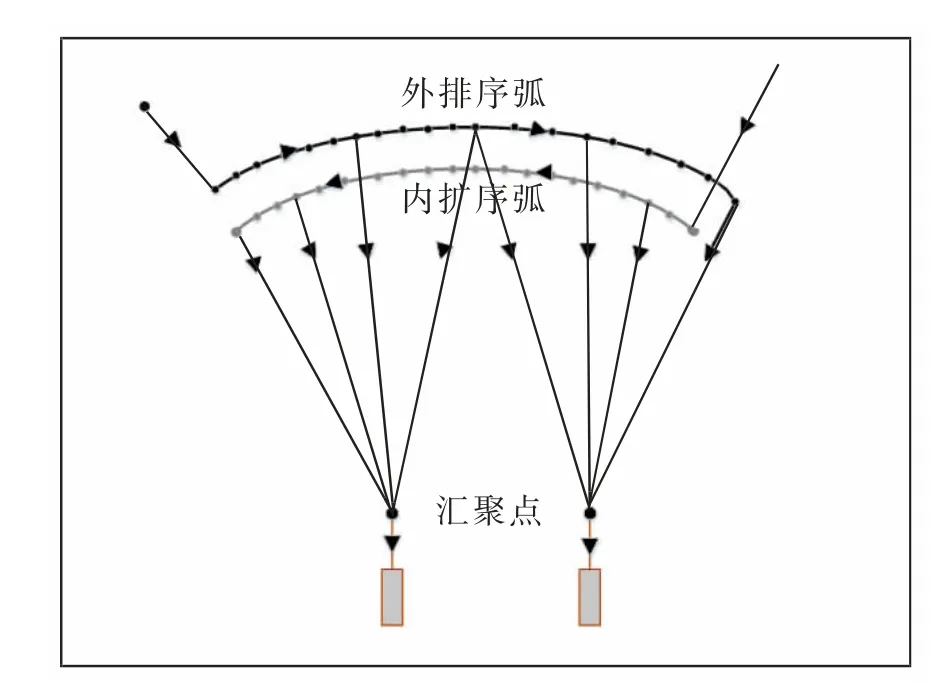
图7 ML-PMS 系统的变式方案Fig.7 Variant design of ML-PMS
4.2 融合CDA 的点汇聚系统
点汇聚系统与连续下降进近(continuous descent approach,CDA)融合模型是在进近区域内设置一个规范的汇聚点,使不同方向的航空器从不同路径下降时可采取连续下降方式并直至到达汇聚点,所有的航空器通过汇聚点后沿着同一条进近路径飞行。
结合CDA 的运行要求,PMS 排序弧高度在1 829~3 048 m 为宜,航空器最大指示空速为463 km/h、下滑航迹角是3°时,可以带来最小的环境与噪声影响[20]。 为了避免ATC 显示器的混乱及保证CDA 的顺利实施,需要科学设置相邻排序弧间的横向间隔以及排序弧-汇聚点的距离,评估点汇聚进近程序近地碰撞风险[21]。
通过实施融合CDA 的PMS,可以将两者效益最大化,在改善运行安全、增加交通容量、节能减排降噪等方面实现1 加1 大于2 的成效。
4.3 基于4D 航迹的点汇聚系统
4D 航迹是航空器在整个飞行全过程全部顺序点迹的4D 空间坐标(包括三维位置和时间)所形成的集合[22]。 而经典的PMS 航路结构是建立在3D 合流形式上[23],只对航空器在PMS 中飞行的经度、纬度和高度进行监控与控制,如果在现有基础上对其增加航空器在PMS 各个位置的时间指标[24],就可以更好地对航空器到达流进行管理。 这种方式就是将PMS 与4D 航迹管理加以联合,构建基于4D 航迹的PMS。
未来,通过将PMS 与4D 航迹管理联合,将航空器到达流与“时间”更好的关联,实现到达流之间更高效的冲突探测与解决,从而优化航空器到达流的管理,提高终端区运行效率。
5 结论
点汇聚系统这一概念自2006 年提出就已引起学界、业界的广大关注。 目前,PMS 已在全世界多个机场成功验证与实施,在保证运行安全性、提升经济性与降低环境影响等方面体现出显著优势。 随着民航运输需求的增长,PMS 有着更加广阔的应用空间。 本文对点汇聚系统的设计概要、 实践应用与未来发展进行了综述,主要结论如下:
1) 点汇聚系统的设计通常涵盖高度、速度、角度与距离4 类核心设计参数。 参数的设置值需要结合终端空域、跑道设置等环境条件进行选取。
2) 点汇聚系统实施机场的案例表明:参数设计值的选取对PMS 的吸纳能力、运行效能、环境效益等均有显著影响。
3) 针对复杂终端空域及民航新技术发展趋势,未来可发展多层点汇聚系统、融合CDA 的点汇聚系统及基于4D 航迹的点汇聚系统等更加安全、高效的点汇聚系统。
在开展点汇聚系统设计时,需密切结合当地空域结构、交通流量、机场条件等设置点汇聚系统的结构,并权衡各类设计参数设置,同时尽量结构简单、整体对称,保持点汇聚系统简单、直观。
