深海声学潜标的定位方法研究
2020-07-07薛睿超杨燕明周鸿涛许德伟
薛睿超,杨燕明,周鸿涛,许德伟,杨 晟
(1.国家海洋局第三海洋研究所,福建厦门361005;2.国家卫星海洋应用中心,北京100000)
潜标是获取海洋环境噪声信息的重要技术装备。潜标装置能携带多种测量和探测仪器, 在恶劣海况条件下相对隐蔽地进行长期、定点、连续和多层面同步测量, 所以潜标装置在海洋科学调查研究、海洋军事侦察等方面得到了广泛的应用[1-4]。潜标技术最早发展于上个世纪50年代的美国,60多年来已发展为一种主要的海洋测量设备[5]。现在国际上除了美国,英国、法国、俄国、加拿大等国也成立了以水下工程技术和深潜技术为主的一批海洋高新技术开发机构。潜标技术也向综合性、长时间、区域性的方向发展[6-10]。
本文中深海潜标定位指的是潜标入水后,底层的重块在海流的影响下会发生漂移,在深海海域漂移的距离会随着海深的增加而增加,导致潜标在海中的实际位置与入水坐标存在数百米的误差。对于深海海域,潜标整体长度在1 000~6 000 m之间,在海流的影响下,潜标姿态往往有一定的倾斜[11-13],主浮体和重块的水平距离可以达到几百米到近千米。故虽然记录了潜标的入水坐标,潜标的位置有可能发生很大的变化[14],给潜标的搜寻工作带来很大的困难,甚至直接导致回收失败、系统丢失,造成巨大的经济损失。为了得到潜标在水中的实际位置以便回收工作的顺利进行,有必要进行重新定位。特别是在潜标回收时,如果遇到释放器失效等情况造成潜标无法回收,卫星通信(简称卫通)设备无法工作,必须先进行定位以及姿态分析,得到潜标的实际位置以及水下姿态等信息才可开展打捞工作。
1 潜标结构介绍
为了便于本文方法的说明,先简要介绍深海潜标的常见结构[15-18],如图1所示。各部分的功能说明如下:
(1) 卫通设备:一般固定在主浮体上,可与卫星通信,在水中处于休眠状态,释放后随主浮体浮出水面后启动工作状态,可以把主浮体的坐标经纬度发送给调查人员;
(2) 主浮体:提供整套潜标系统的主要浮力,其上可绑漂流绳便于回收;
(3) 接收阵:潜标搭载的记录设备(如水听器和深度记录仪),具体数量和固定位置根据海域情况和数据要求决定;
(4) 过渡绳:用于连接接收阵和底部设备的缆绳;
(5) 浮球:提供整套系统的部分浮力以及重要设备上浮所需要的浮力,个数和单位浮力需要具体计算;
(6) 声学释放器:潜标回收的主要设备,通过与调查船上的甲板单元进行通信,可返回声学释放器与甲板单元之间的距离数据,并可触发释放模式断开与重块的连接,使整套潜标系统上浮;
(7) 钢缆:连接释放器与重块,长度不宜过短以起到缓冲作用;
(8) 重块(或抓力锚):使整套系统能沉入海底,重量需具体计算,一般应大于系统整体浮力的2~3倍,其上可加减速伞以减小沉底速度。
2 定位方法
2.1 十字交叉法
2.1.1 设计原理
十字交叉定位法的原理是基于几何方法的中垂线定理,具体是:通过声学释放器的测距功能,设计船舶行驶的多条测线,并在途中进行多次测距,最终找到距离潜标最近的坐标。该方法原理简单易懂,便于操船人员理解和执行,缺点是较费船时,精度较低。
2.1.2 实施方式
首先根据记录的重块入水点,船舶航行至目标点附近距离1海里(1海里=1 852 m)左右,以正北方向距船舶一海里处为目标点,然后分别确定试探测线、确定测线以及验证测线。
试探测线:由目标点和船舶的连线确定,长度为1~2海里,具体视测量结果决定。
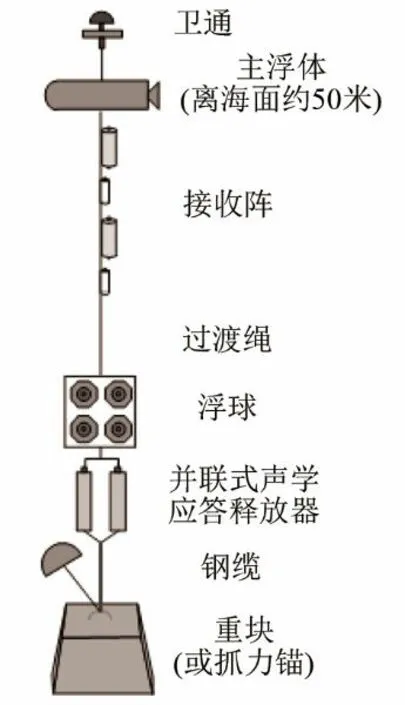
图1 常见潜标结构图Fig.1 The universal structure chart of submerged buoy
确定测线:根据试探测线的结果,以其垂直线和最小测距坐标为垂足确定确定测线,通过确定测线可初步得到重块沉底的位置坐标;
验证测线:以确定测线的垂线和第二次最小测距坐标为垂足验证测线,通过验证测线来验证最终重块的沉底位置。
“十字交叉法”船舶航行轨迹由图2所示。具体实施步骤如下:
(1) 船舶航行通过AB测线,期间每隔5 min做一次声学释放器应答实验,并记录距离值和坐标,根据距离值的变化情况(如从大到小再到大),提取两个距离值最相近的点连线,其中垂线所在位置可定出确定测线CD;
(2) 船舶航行通过CD测线,同AB测线步骤可得另一中垂线EF,两条中垂线的交点可定出坐标点G点;
(3) 最后船舶航行通过EF测线,同样进行声学释放器应答实验进行验证。如经过G点前后距离值由大变小再变大,则证明G点为最终计算得到的水泥块沉底坐标。
由图2可知,实际航行路线为A→B→C→H→E→F。
2.2 三点法
2.2.1 设计原理
本文所要介绍的另一种定位方法是三点式潜标定位法,该方法只需要对3个非同一直线上的坐标进行测距,测量过程在回收航行过程中即可完成,即能准确地定位重块在海底的实际位置。相比十字交叉法,该方法基于数学计算和几何模型,执行难度较低,节省了船时。
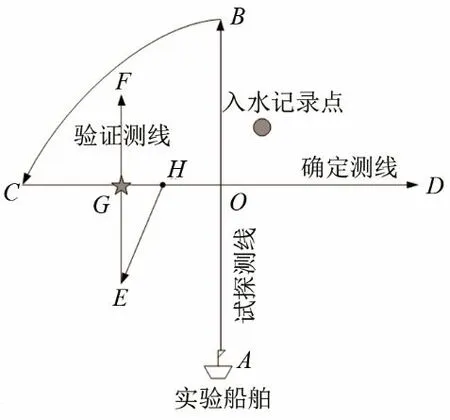
图2 “十字交叉法”船舶航行轨迹Fig.2 Ship tracks for "cross method" localization
为实现上述目的,所采用的技术方案包括如下步骤:
(1) 获取三个释放器响应距离内不同位置的经纬度和相应的测距值;
(2) 把数据代入本文的几何模型中;
(3) 通过自编的计算程序进行计算处理,得到重块经纬度和深度的计算值和示意图。
步骤(1)中需要在调查船靠近潜标的航行中做3次测量(其间距离不宜过小),相对于十字交叉法,需要设计特定的测线进行定位,节约了船舶航行的时间和成本,这是本方法的一大优势。步骤(2)中涉及的计算方法构建的几何模型如图3所示:3次测量实验的坐标计为A、B、C(3点应相距一定的距离且不在同一直线上),所测得的3个距离值计为ra、br、cr,设L点为重块在海中的坐标,以A为球心、ra为半径的球与以B为球心,rb为半径的球相交于面1。同理,以A为球心、ra半径的球与以C为球心、rc为半径的球相交于面2。其平面示意图如图4所示。图4中,A、B、C3点所处面为海面,OD为球A与球B相交面在海面的投影,OE为球A与球C相交面在海面的投影,则OL垂直海面于O点,O点为线OL在海面的投影。由几何关系可知,面1与面2必垂直于海面且二者相交于直线OL,则OL也垂直于海面,具体计算过程见2.2.3节。所以O点的经纬度即为所求重块的位置,OL的长度为重块处的海深;步骤(3)中的计算程序基于MATLAB软件编写,计算结果包括重块的经纬度、重块所处位置的海深以及测量结果的位置示意图等。
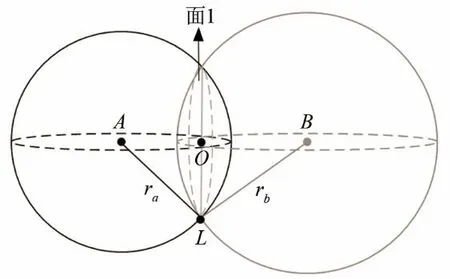
图3 空间几何模型示意图Fig.3 Schematic diagram of spatial geometry model
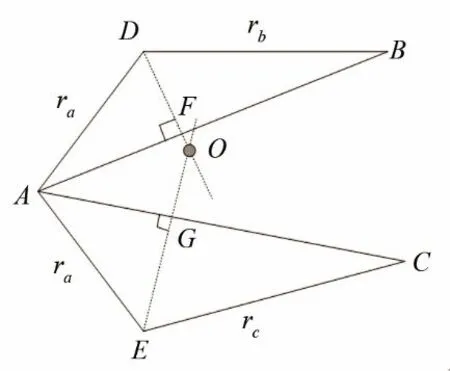
图4 平面几何模型示意图Fig.4 Schematic diagram of plane geometry model
2.2.2 实施方式
下面结合图例对本文的实施方式进行说明。实施方法流程图如图5所示。具体实施步骤如下:
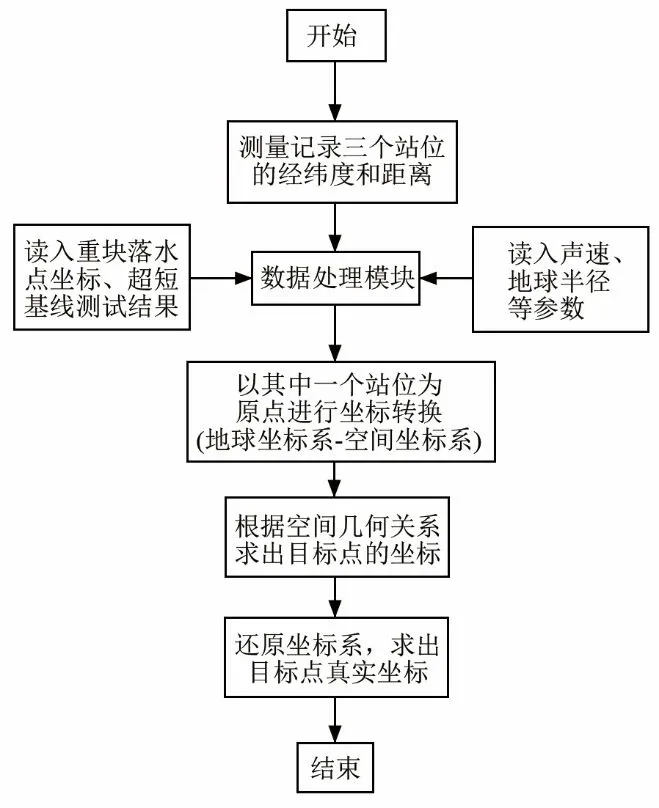
图5 三点法计算流程图Fig.5 The flow chart of three-point method calculation
(1) 在潜标布放点附近的3个不同站位进行3次声学释放器响应实验,得到3组数据,该步骤可以在回收潜标的航行过程中进行;
(2) 输入重块落水点、当地平均声速、地球平均半径、超短基线测试结果(如有)等参数;
(3) 把地球坐标系转换为以A(B、C也可)为原点的空间坐标系,记为A坐标系,求出A坐标系中B、C的坐标;
(4) 根据空间几何关系,计算得到目标点的坐标以及OL的长度。具体计算步骤如下:
ⓐ 求出球A、球B与球A、球C的两个相交圆所在平面的方程;
ⓑ 求出平面ABC的单位法向量;
ⓒ 由平面ABC和两个相交圆所在平面定出O点的坐标以及OL的长度;
(5) 还原为地球坐标系,得到目标的经纬度值和海深。
2.2.3 计算过程
设三次测量的点为A、B、C,坐标分别为(ax,ay),(bx,by),(cx,cy),已知地球半径R=6 371 116 m,计算过程如下:
(1) 转换为地球坐标系,则:
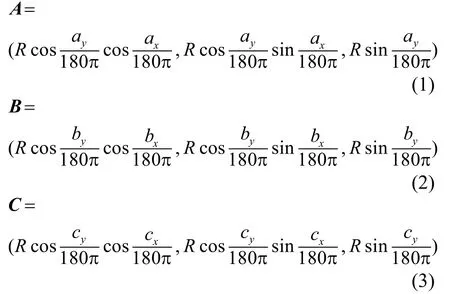
(2) 转换为以A为原点的空间坐标系,则A、B、C的坐标A、B、C分别为

(3) 在空间坐标中,已知两点坐标,则两点间的距离为

根据海伦三角公式,三角形面积可表示为

(4) 根据A、B两点的坐标和距离求出球A、球B相交圆周所在平面(以下简称面AB)的单位法向量,同理求出球A、球C相交圆周所在平面(以下简称面AC)的单位法向量:


由面AB和面AC法向量可求出ABC所在平面的法向量:

(5) 求出F、G点在以A为原点的空间坐标系里的坐标:

(6) 至此,已知3个相交面的法向量和面上的点坐标,求解方程组可确定O点,根据AL和AO的长度确定深度OL的长度:

3 对比实验验证
本文中的两种方法均已在实际航次中得到应用,取得了良好的效果。其中三点式定位法在某海域的某专项声学调查航次期间,利用潜标上搭载的超短基线定位设备的测量结果进行了对比实验。实验所布放的潜标所在海域水深约为2 000 m,符合深海的标准。
3.1 验证方法
在潜标的浮球上安装了一个超短基线水下定位系统,该系统激活后,通过与船载部分GPS的通信可以得到水下设备所在处的经纬度以及与调查船之间的距离,具有较高的精确度。通过本文方法的结果与该位置数据进行对比,可以判断本文方法的准确性以及误差范围。
实验过程如下:调查船布放潜标后,记录重块的入水点坐标;在附近海域分别进行3次测量,为提高实验的准确性,分别在重块入水点的3个不同方位的站位进行了测量,对比实验测点及结果示意图如图6所示。超短基线设备因工作深度问题,只能安装在离水面较近的玻璃微珠浮球上,潜标上安装多个不同深度的深度传感器设备,可用来分析潜标在水中的姿态和倾角等参数。
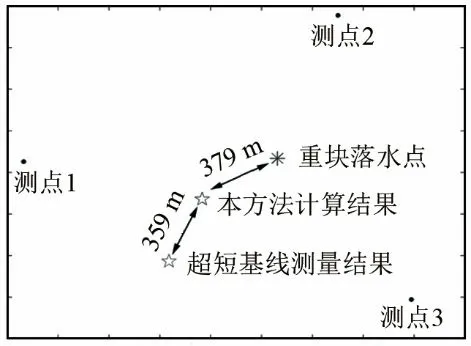
图6 对比实验测点及结果示意图Fig.6 The measuring points and the results of comparative experiment
3.2 实验结果与误差分析
对比实验设备安装结构及误差分析结果如图7所示。实验结果重块距落水点水平漂移距离379 m,超短基线水下定位系统返回的坐标位置与本方法计算的坐标位置二者相差359 m。考虑到超短基线所在浮球的位置与声学释放器之间的线缆长度为1420 m(设计值),再根据深度传感器数据,判断潜标在水中的姿态倾角约为14 °,则实际水平距离应为343.5 m,计算值误差为15.5 m,如图7所示。
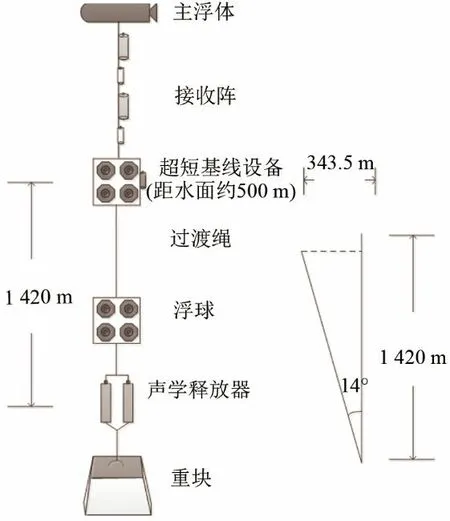
图7 对比实验设备安装及误差分析结果Fig.7 Layout of comparative experiment and the error analysis result
4 结 论
本文介绍的三点式定位法的精度依赖于声学释放器的系统定位精度,而声学释放器的精度受其数据处理方法的影响(如默认声速为 1 500 m·s-1),返回的测量距离往往有几米到几十米的误差。假设水深为 5 000 m,综合考虑各设备精度,实际误差在50 ~100 m间、精度为1%~2%,可以满足实际使用要求。
本文介绍的定位方法经过多次海上调查实验的验证,具有计算精度高、可节约航行时间的特点,可以有效地解决深海潜标回收工作中遇到的实际问题,如潜标失效或者定位海底固定目标等,可供从事海洋调查的人员参考交流。
