煤矿井下带式输送机纠偏装置的设计与应用
2020-07-07刘乐
刘 乐
(晋煤集团晟泰公司机电安装分公司, 山西 晋城 048000)
引言
带式输送机是一种大型功能复杂的多设备系统,是煤矿井下生产过程中不可或缺的物料运输设备[1]。带式输送机在实际运输过程中,工作环境恶劣复杂,常常出现胶带偏离纵向中心线即跑偏的问题[2],从而引起物料的倾洒,甚至胶带边沿的磨损,降低输送带的使用寿命,严重时还会造成输送带断裂、烧损甚至引发火灾,导致煤炭运输线停运,影响安全生产,严重阻碍着带式输送机的发展[3],因此,本文设计一种光电式的有源纠偏装置以解决上述问题。
1 带式输送机跑偏原因
煤矿井下带式输送机跑偏的原因较多[4-6],分析其原因主要有以下三个方面:
1.1 输送机胶带张紧力不足
输送机胶带松弛张紧力不足时,会引起胶带所受拉力不均匀,这时容易导致胶带跑偏。而导致输送机胶带松弛也主要有两个方面的因素,一是胶带初始安装后,张紧力正常,由于胶带一般承受的载荷量较大,在长时间的高负荷运行之后,胶带容易发生变形,甚至造成胶带边缘严重磨损,从而导致胶带张紧力较低,不能满足胶带正常运输时所需的张紧力要求;二是载荷较大的问题,当输送机没有载荷或者载荷较小时,胶带不会发生跑偏,但是当载荷逐渐加大一定量的时候,此时张紧力也会出现降低,胶带发生跑偏。
1.2 机械安装相对位置不合理
带式输送机的安装对各部位结构的相对位置是有一定要求的,一旦位置安装不合理,胶带容易出现跑偏。例如:在进行前后滚筒安装过程中,如果前后的滚筒中心线偏差大或者与胶带的中心线不垂直时,带式输送机在运行过程中,都会产生横向的拉力,从而导致胶带始终偏向一侧,随着幅度不断增加,最终导致胶带跑偏。还有当托辊轴线和胶带的中心线安装不垂直时,也会在高速运行时,产生一个横向力,最终导致偏移。
1.3 卸料点位置偏移
胶带接收物料的位置是一个槽型,并且都是从转载机处进行接收,如果卸料点在进行物料卸载时总是偏向于一侧相同的方向,这样长时间运行后,受料多的一侧侧辊受力较大引起一定程度的倾斜,此时物料作用于胶带上的力产生一个横向的作用力,从而导致胶带向一侧移动,积累到一定的程度后,胶带发生跑偏。
2 输送带纠偏装置的设计
2.1 总体方案设计
输送带的纠偏根据有无外力的输入可以分为无源纠偏和有源纠偏。其中无源纠偏利用的是输送带跑偏后自身产生的阻力,使得托辊支架反向偏转实现输送带的自动纠偏。而有源纠偏又有机械传动式、液压式、气动式和光电式等几种自动纠偏装置。其中机械传动式纠偏装置的稳定性不足,纠偏效果也较差,但是成本较低,在小型带式输送机上应用比较多;液压式自动纠偏装置稳定性较好,纠偏效果也较好,并且反应灵敏,但是液压传动装置结构复杂,占用空间也大,成本相对较高,同时容易对输送带的边沿造成损伤,零部件易出现故障;气动式自动纠偏装置采用气动的方式进行控制,纠偏效果明显,并且自动化的程度较高,对输送带的损伤较小,但是安装和后期维护较为麻烦和复杂,成本很高,适用于高瓦斯的场所;光电式自动纠偏装置能够实现检测和纠偏一体化,纠偏速度较快,同时对输送带的损伤小,但是对环境较为敏感,适应性较差,在大中型带式输送机上应用较多。
本文采用光电式的有源纠偏装置,其结构原理如图1所示。首先跑偏量检测装置监测输送带横向位置的数据信息,并传递给控制器,控制器按照特定算法对数据信息进行计算和分析,并根据计算出的控制量驱动伺服电机转动的速度、方向和角度,从而驱动蜗杆、涡轮运动,最终带动与涡轮连接在一起的托辊支架绕旋转中心一起偏转,小角度改变托辊轴线,实现输送带的自动纠偏。
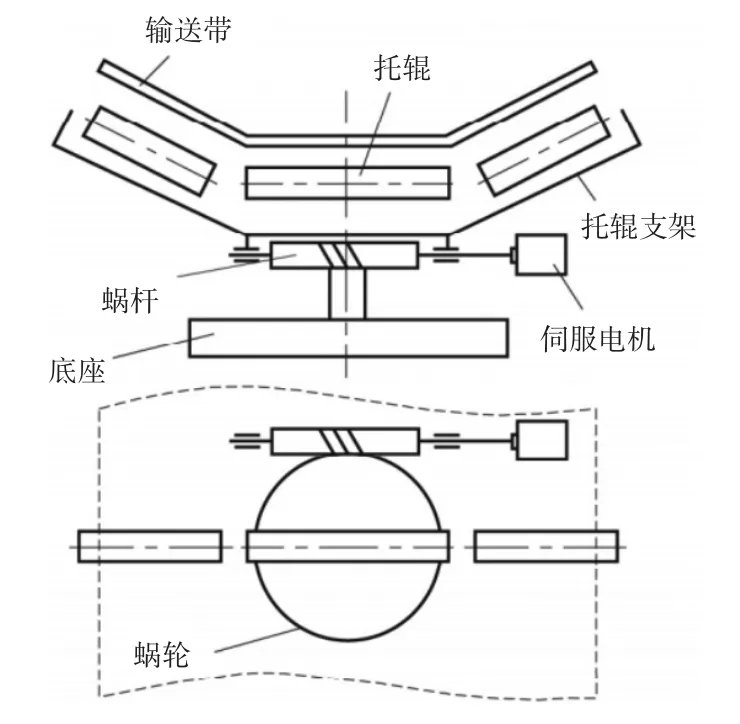
图1 纠偏装置机构原理
2.2 跑偏检测系统的设计
跑偏检测是输送带纠偏的基础,目前在煤矿中应用较多并且效果较好的检测方法是接触式的跑偏检测法,在输送胶带容易跑偏的两端旁边分别安装一个跑偏传感器,如图2所示。该传感器为立棍式,工作电压为DC 18 V,工作电流为20 mA,包括万向活动杆、接线板和出现嘴。该传感器根据输送带的倾斜角度分为了两级响应,输送胶带跑偏以后,其中一个传感器会有一定角度的偏转,当这个角度较小为一级跑偏时,控制器接收信号后只发出声光报警,不做停机处理,由工作人员对胶带进行人工调整;当胶带跑偏严重后,传感器的偏转角度较大,达到二级响应,控制器接收信号后既发出声光报警,同时也发出电机停机指令。
2.3 控制器方案的设计
控制系统是实现纠偏的核心,对系统输出和控制要求具有较高的稳定性,因此选用模糊比例积分控制器,该控制器综合了模糊控制器和比例积分控制器的优点,与常规比例积分微分控制器相比,在对复杂控制系统的控制效果上控制效果更优。该纠偏装置控制系统框图如图3所示,控制系统具体方案如下:
1)当传感器检测到的输送带的位移量小于95 cm时,跑偏较小时,为了提高控制系统的稳定性,此时切断模糊控制器,仅仅使用比例积分控制器,并将其输出量直接作为电机控制器的唯一输入量。
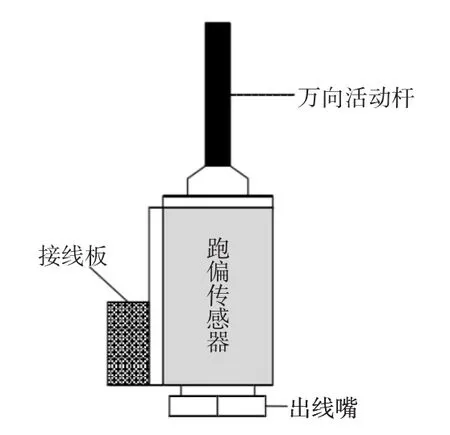
图2 跑偏检测传感器示意图
2)当传感器检测到的输送带的位移量大于95cm,跑偏较大时,为了降低各种随机因素对系统的影响,模糊和比例积分控制器都同时起作用,两者共同的输出量同时传输给电机控制器。
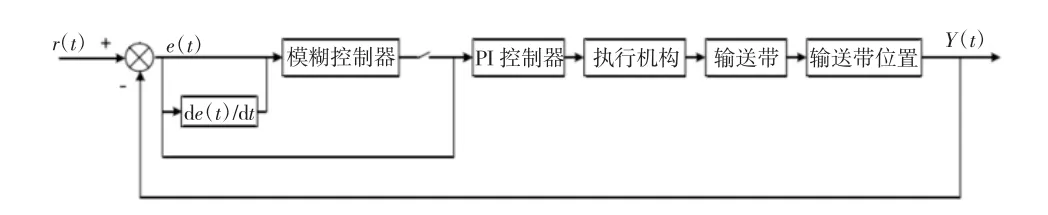
图3 纠偏装置控制系统框图
3 应用效果及建议
输送带跑偏在现场比较常见,通过采取纠偏措施解决。该纠偏装置通过在现场应用,有一定的效果。对于带式输送机纠偏装置方面的设计和应用,可以进一步提高:
1)对于带式输送机的零部件,要实现标准化和模块化,并且在加工和安装过程中实现精密化,从根本上解决输送带跑偏的问题。
2)提升输送带纠偏装置的智能化,输送带纠偏装置需要结合计算机检测和机电一体化等技术,实时监测输送带跑偏情况,并能及时反馈调整,形成一个完整的反馈系统。
3)提高输送带纠偏装置的适应性,由于带式输送机的工况条件恶劣,尤其是在煤矿井下应用时,工况更加复杂,纠偏装置需要保证足够的精度,因此需要尽可能提高纠偏装置的适应能力。