工程结构网络化监测系统关键技术研究*
2020-07-06叶廷东
叶廷东
(广东轻工职业技术学院 信息技术学院,广东 广州 510300)
工程结构监测研究是一个涉及力学、机械、通信、网络等多个科学领域的前沿研究方向[1],在国内外已取得较多研究成果,但多是面向土木工程结构的应用研究。目前随着结构监测技术在大型结构在线安全监测方面的应用研究的深入,监测系统涉及的传感器数目、有待处理的数据量以及系统的复杂性都在不断增加,如香港青马大桥上就布置了 350 个传感通道,整个监测系统成本达到百万美金[2]。工程结构监测无论是光纤传感技术、无线传感技术等的引入,还是在满足多点、高效、高性能的监测需求方面,仍然需要开展深入研究。在工程结构监测应用中,往往存在以下技术问题[3-5]:
(1)工程结构往往需要多点、大结构面和高性能的监测,涉及传感器很多,往往需要多监测任务的协同优化;
(2)工程结构通常结构复杂,甚至特异,为方便施工的安装,实现低功耗、高性能的通信,需要融合有线和无线网络的优点,开展异构监测网络的融合架构设计研究;
(3)工程结构监测往往环境噪声大,干扰多,而有些监测信号属于微弱信号,同时结构监测系统复杂、涉及传感器多,因此需要研究强干扰下的高精度测量技术、传感检测校正技术和智能诊断技术,提高检测准确度,降低维护成本。
为此本研究将针对工程结构应变网络化高性能监测及低成本维护的需求,研究提出一种监测系统解决方案,实现工程结构应变监护系统多传感协同检测、自校正,利用LoRa构建底层无线传感网,并通过低功耗IPv6与IPv4网络融合技术,实现工程结构测管控一体化。
1 监测系统研究方案
针对大型工程结构应变监测多点、高性能、快速部署的需求,研究提出如图1所示的监测系统总体研究方案。
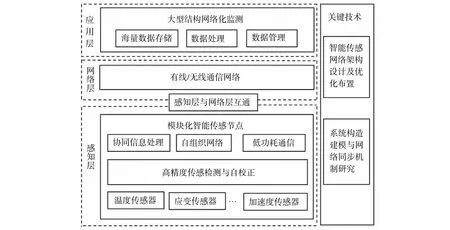
图1 大型结构网络化监测总体方案
要实现该方案,将网络化监测系统分成了三层,分别为感知层、网络层和应用层,在感知层主要由模块化智能传感节点组成,每个传感节点可以实现高精度传感检测与自校正,同时可以基于网络同步机制实现自组网、协同信息处理和低功耗通信。在网络层则融合有线和无线网络的优点,设计异构监测网络,根据传感监测网络架构,开展传感节点仿真与优化布置。在应用层则实现海量数据存储、数量处理与管理,通过数据分析,进而可实现智能诊断等应用。因此,该网络化监测系统研究需要重点解决:网络化系统通用建模与网络协同机制研究、多传感协同检测与自校正技术研究等。
2 关键技术研究
2.1 系统通用建模与网络协同机制研究
网络化智能传感监测系统通用模型的协同建模分析包括传感系统的静态模型、动态模型和系统部署模型三个层次。其中静态用例建模为动态行为描述的基础,系统部署建模是静态用例和动态描述的进一步深化,整个传感系统的建模效果可以证明静态建模和动态描述的正确性[6-7]。
网络化智能传感监测系统协同建模,若要清晰表达智能传感监测系统的软、硬件结构体系,又要能反映出智能传感器节点的模块化、互操作性和扩展性,就必须要规范化地描述系统的静态结构和动态行为并统一规划系统的部署。在系统部署系列过程中,如果硬件资源没有得到有效利用,或是软件没有针对硬件资源进行优化,后续的软件编码、调试、集成、验证和确认都可能出现差错,并对传感系统性能造成严重影响,故系统部署建模必须在系统功能静态分析、动态描述的基础上,遵循先确定运算核心、再配置外围电路的顺序原则进行。图2为智能传感监测系统部署建模的流程图,通过对传感系统电路合理配置,一定程度上找出系统比如应用内核、瓶颈和最耗费代码行部分等潜在问题,有效提高软件性能,减少关键功能的时钟数及非关键功能代码大小。基于智能传感系统部署建模流程图,重点研究规范化的传感系统静态模型、动态模型和系统部署模型描述建模规则及方法,传感系统静态功能、动态描述需求以及映射成各物理构件和节点的机制、从通用模型到网络化智能传感器的快速协同构造方法等。
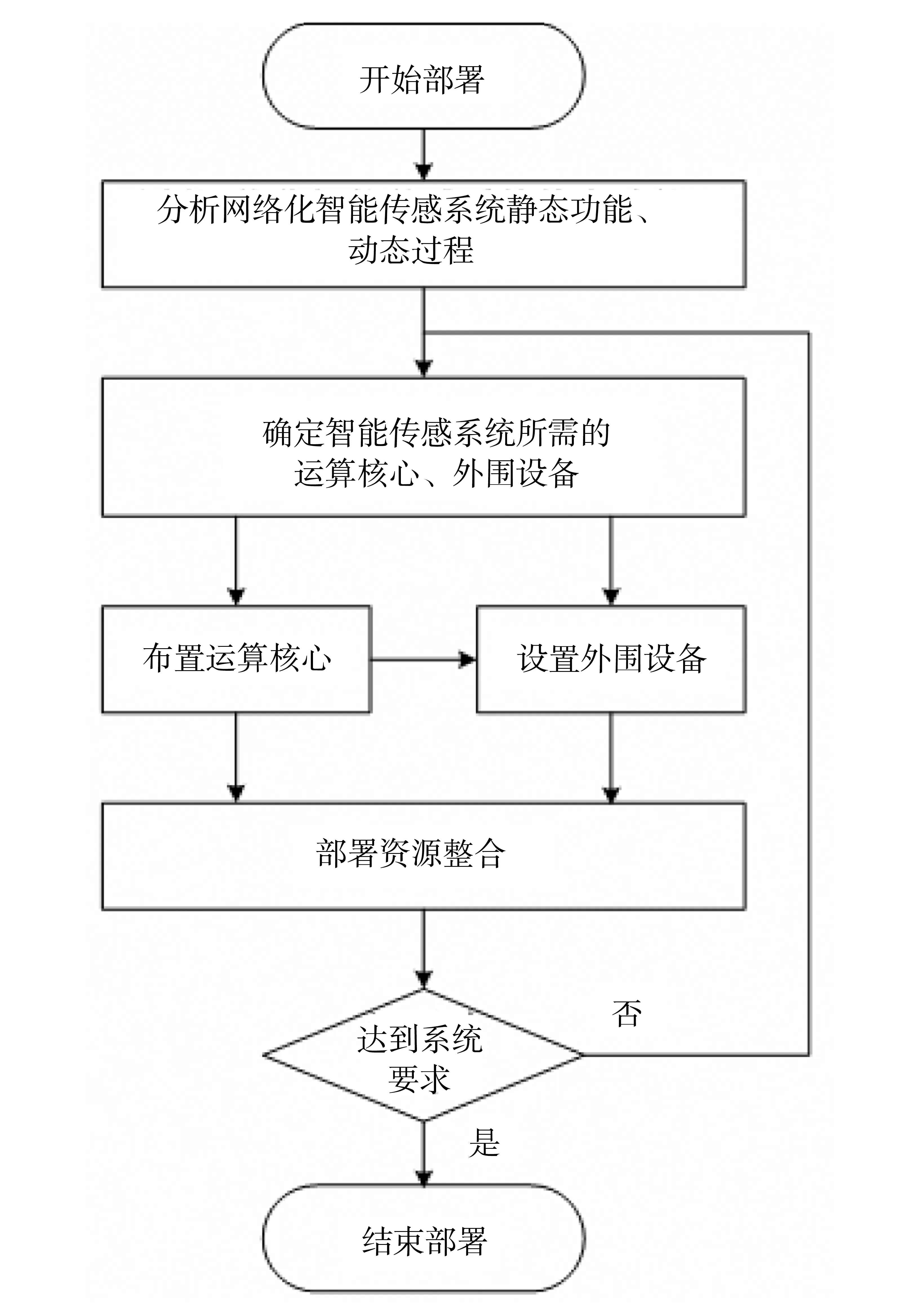
图2 智能传感系统部署建模流程图
在协同机制方面,主要基于智能传感系统通用模型,从传感系统模型的硬件架构、信号流走向、网络传输、准确度等方面协同综合考虑,建立相应的信号流协同传输与调度模型,实现业务级别协同调度策略,使重要检测数据得到优先处理、有效抑制拥塞崩溃。
2.2 多传感协同检测与自校正技术研究
当前网络化智能传感的任务趋于多样化、立体化发展,目标环境越来越复杂,观测范围要求越来越广。通过协同学理论与复杂网络化智能传感系统特点间的分析,对多传感系统协同检测理论的研究分析,可按照以下步骤开展: 首先,结合UML传感建模,把具体问题用数学方法描述,建立系统的数学模型和相应的方程组。其次,对系统的方程组进行线性稳定性分析,确定线性稳定性丧失的条件;区分稳定模式和不稳定模式,应用役使原理消去快变量,得到序参量方程并化简,推导出其势函数[8-9]。最后,分析和求解方程,在上述研究过程中,协同模型自组织演化与求解过程可以用图3表示。图3(a)所示为实现系统特定目标任务的计划分解;图3(b) 所示为多传感的任务计划及调控;图3(c)为信息感知和序参量构造;图3(d)所示为应用役使原理,获得序参量方程, 即把一个高维的非线性问题化简为一组维数很低的非线性方程。在这个基于协同的多传感测量模型中,通过协同检测任务的分解、调控、序参量模型建立、解算等,可以实现系统演化前后状态的转变,实现既定的协同检测目标和任务。
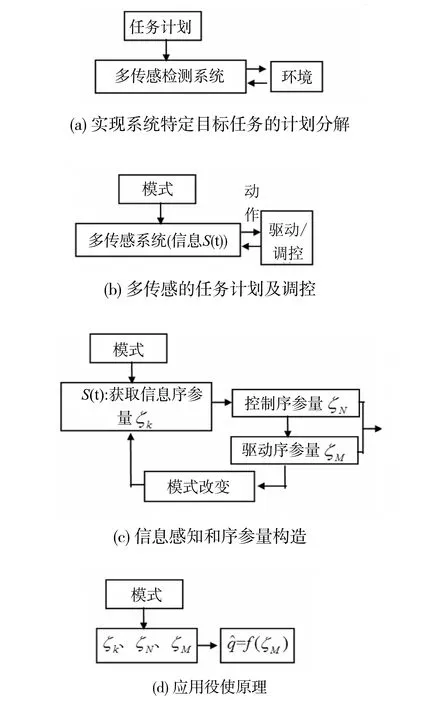
图3 多传感系统的协同模型自组织演化过程

图4 序参量网络模型
基于协同检测方法,针对工程应用中强环境噪声干扰下微弱信号的测量,研究恒流源高精度比例测量技术,设计高质量测量电路;数据采集后,研究利用传感信息校正技术,实现对传感信息的自校正。传感信息自校正将基于虚拟电子数据表TEDS(Transducers Electronic Data Sheet)方法和协同化简的一组低维方程,基于标准校正引擎公式转换的TEDS配置方法,实现多维传感信息的高质、高效自校正[7,10]。图5是智能传感监测系统数据校正模型图,校正引擎运行在NCAP(Network Capable Application Processor),通过读取STIM(Smart Transducer Interface Module)中的校正TEDS系数,应用特定数学函数,对1个或多个STIM通道传感数据进行校正。对于一个n通道的传感器模型,其校正公式表示如下:
f(X1,X2,…,Xn)=
[Xn-Hn]p
(1)
式中,Xn为传感器输出的变量值;Hn为输出变量的修正值;D(n)为输出变量的阶数;Ci,j,…,p为系数。从校正方式来看,校正模型的参数设置必须与TEDS格式相适应。
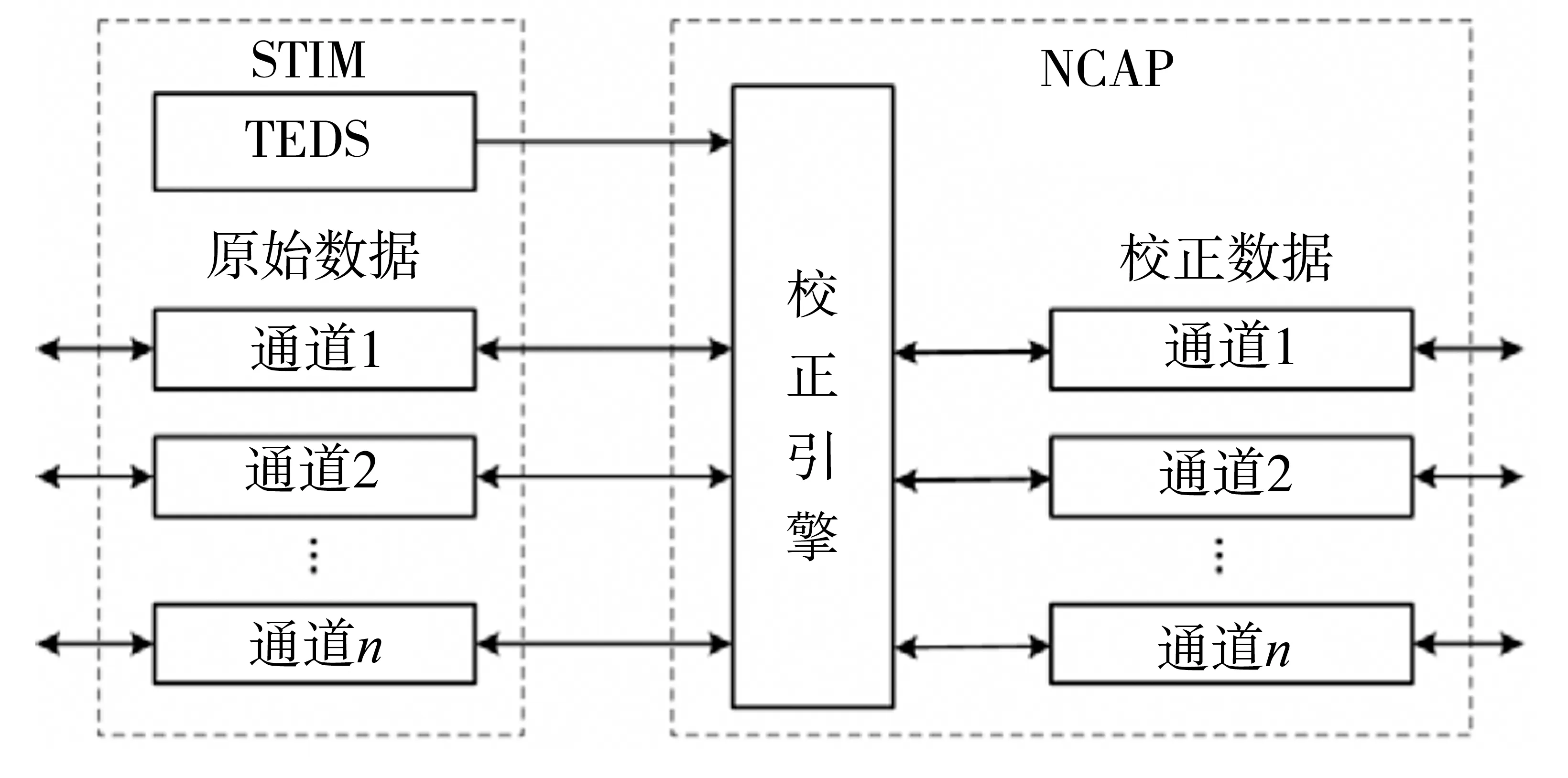
图5 智能传感系统数据校正模型图
3 实验与测试
LoRa技术具有远距离、低功耗、多节点、低成本等特点,相比于Zigbee无线自组网用于较大面积应用场景时复杂多跳模式,LoRa终端节点与网关通信距离长达1~20Km,简单星型结构即可覆盖相应区域,既减少模块数量也降低网络消耗。根据本研究的实际需要,基于LoRaWAN通信协议,设计了LoRa模块配传感器的终端采集节点以及支持轻量级IPv6/v4协议的智能网关构成低功耗无线远距离传感网。其中LoRa模块设计采用MCU+无线收发模块的组合,核心芯片分别选择具有低功耗特性的STM32L151和Semtech公司 SX1272。从LoRa终端节点软硬件设计和网络通信规则制定两方面实现低功耗设计,整体降低设备功耗,进而降低系统运营维护成本,最终实现低功耗IPv6与IPv4网络融合。
采用上述具有LoRa模块的终端采集节点和IPv6/v4智能网关,可以组建如图6所示的工程结构应变监测实验系统,该系统采用星型拓扑结构,节点监测到数据后发送到IPv6/v4智能网关,然后传输到云端监测平台。基于上述实验系统开展了实验测试,结果如表1所示。

图6 协同监测试验系统框架
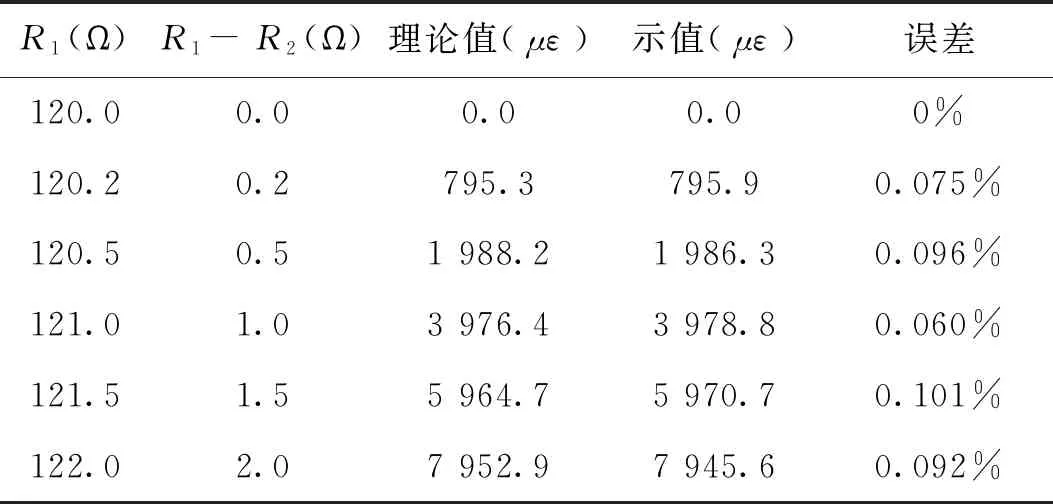
表1 应变测量测试结果
4 结语
工程结构监测在机械工程及重大制造装备,高铁、汽车、轮船等重要设备,核电安全壳、水轮机轴、蒸汽管道等电力动力关键设备,土木建筑及水利工程的大型构件,大型钢结构桥梁和道路涵隧工程等领域有着广泛的应用。通过检测,可实时掌握关键重要结构件状态,确保结构安全。
本研究针对工程结构网络化高性能监测及低成本维护的需求,主要开展了整体监测系统架构研究,提出了关于网络化智能监护系统通用模型与协同机制、多传感协同检测与自校正方法等关键技术问题。
(1)系统通用建模与协同机制研究。研究结构监测系统的建模分析和多监测任务协同问题,实现从传感系统模型的硬件架构、信号流走向、网络传输、检测准确度等方面协同综合。
(2)多传感协同检测与自校正方法研究。结合面向对象的智能传感系统UML建模方法,引入协同学理论,解决UML建模缺少严格数学描述的问题,重点开展多维序参量的构造机理、协同模型自组织演化机理和能量约束条件下的立体化多传感协同检测方法研究和强噪声环境干扰下微弱信号的信息自校正技术研究。
本研究通过初步的实验具有良好的适用性。
