基于SMC的六相双Y移30°PMSM直接转矩容错控制
2020-07-04赫雪萍朱建光梁晨
赫雪萍 朱建光 梁晨
摘要:该文以双Y移30°六相PMSM为研究对象,针对电机断相故障,提出了直接转矩容错控制算法;为增强系统的鲁棒性能和动态性能,设计了滑模控制系统代替在转速环上的传统PI控制器,仿真验证了基于滑模转速调节的直接转矩容错控制的可行性。
关键词:PMSM;直接转矩容错控制;PI控制;滑模控制
中图分类号:TP273.5 文献标识码:A
文章编号:1009-3044(2020)13-0239-03
1引言
文献[2]提出了PR控制器的矢量解耦容错控制算法,经验证,该容错控制算法能够大幅降低两相不对称故障所帶来的转矩脉动,算法能有效提高电驱动系统的可靠性。文献提出了基于修正变量的任意两相开相的直接转矩控制容错策略,仿真结果验证了该容错策略具有良好的响应速度和稳定性。文献[6]设计了简化控制集的模型预测电流控制,实验验证了该控制策略可以减轻计算的工作量,提高容错驱动器的瞬态和稳态性能。
该文实现了基于滑模转速调节的六相双Y移30°PMSM直接转矩容错控制,通过切换开关表容错算法,使电机恢复相对正常的运转。此外,本文设计了一种新型趋近律下的滑模控制系统来替换传统PI控制器,使得电机的动态性能与鲁棒性能得到优化。
2直接转矩容错控制原理
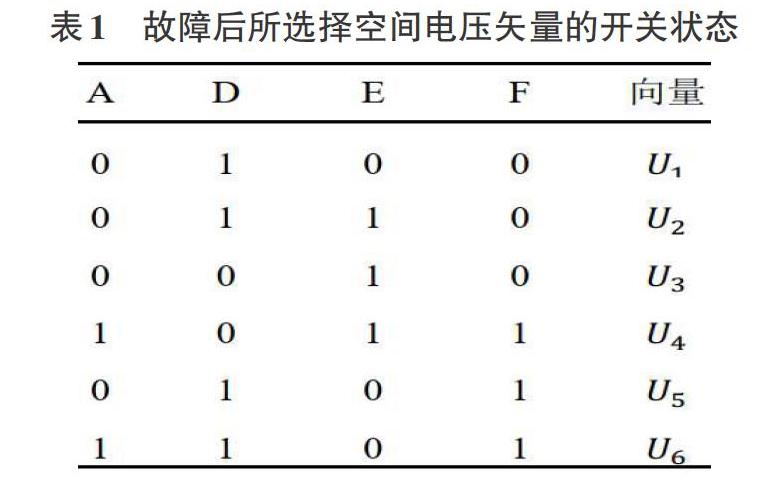
直接转矩容错控制的思想概括为,在电机发生断相故障后,原本电机所选择的空间电压矢量已经不再适合当前电机剩余健康相所形成的扇区,因此,为了实现电机的容错控制,需要利用剩余健康相重新建立空间电压矢量以适应剩余健康相所形成的扇区,最终使得电机磁链恢复为平滑的圆形,使缺相运行的电机恢复至相对正常的工作状态。
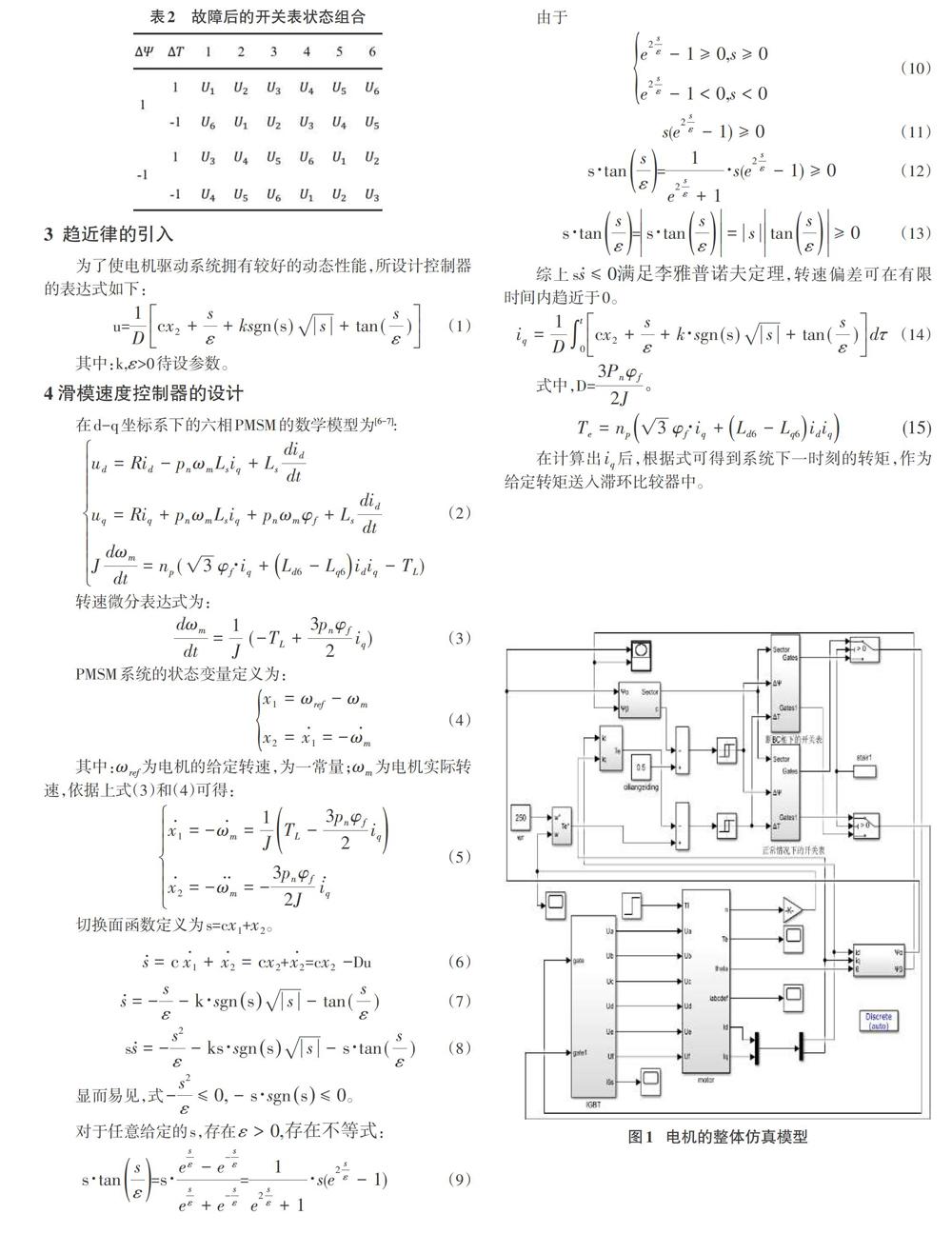
在BC相发生开路故障后,A、D、E、F相为电机的剩余健康相,共有16(24)个空间电压矢量可选择,因此,将整个工作扇区分切为6个扇区,在16个空间电压矢量中,择选出6个适合当前故障下的健康相,使电机恢复至相对正常的控制状态。切换容错算法后的空间电压矢量开关选择状态如表1所示,实现容错控制的内部开关表状态组合如表2所示,表中的1,2,3,4,5,6表示为系统工作扇区。
图3和图4分别为电机在PI和SMC控制器作用下的整体转速与转矩对比分析图,控制系统在0.2s增加一个25N.m的负载转距,在0.3s发生断相故障,在0.4s切换至容错算法。
通过滑模控制器调节后的转速的超调量控制的较小,当电机突加25N·m负载转矩后,在滑模控制下的转速下降幅度较小,且恢复至给定转速的时间较短;容错后的电机转速超调较小,且转速调节时间较短。通过滑模控制器调节后的电机驱动系统,经切换容错算法后的转矩相对快速地达到稳定且转矩波动小。
6结论
通过上述仿真图像对比可知,将转速环上的PI控制器更换成滑模控制器后,电机各个输出参数可达到很好的优化,可克服电机参数变化对实际控制的影响,增强电机控制系统的抗干扰能力,电机响应速度得到很大程度的提升。
