多源信息融合的车速预测方法及整车能量管理
2020-07-02潘龙帅高建平郗建国
潘龙帅,高建平,宋 哲,郗建国
(河南科技大学 车辆与交通工程学院,河南 洛阳 471003)
0 引言
双行星排功率分流式混合动力汽车(power split hybrid electric vehicle,PS-HEV)的结构紧凑并能实现发动机与负载的完全解耦,因此具有较好的应用前景,其能量管理策略是PS-HEV节能的关键技术,直接影响整车的动力性和经济性[1]。整车能量管理策略主要分为基于规则经验和基于优化算法两种。其中,规则类控制策略的节能潜力不仅受制于工程师的开发经验,而且严格依赖于具体的行驶工况,原始规则制定的参数可能不太适合未知的旅途条件[2]。因此,优化类能量管理策略对进一步提升整车的燃油经济性和旅途适应性具有重大的意义,而该方法在很大程度上依赖于对未来车速的准确预测。文献[3]采用动态规划(dynamic programming,DP)理论,针对特定工况进行了最优功率分配及换挡规则求解,显著提高了燃油经济性。然而,动态规划依赖于未来的全局工况已知,不具备实时性。文献[4]通过融合汽车历史车速和经度等信息对未来车速进行预测。文献[5]通过基于数据的方法,充分考虑了驾驶员对未来车速变化趋势的影响,将车速预测结果应用于模型预测控制策略。文献[6]对比分析了指数预测、马尔可夫链预测以及人工神经网络预测方法,验证了车速预测精度对提升燃油经济性的有效性。这些用于优化能量管理策略的未来车速预测方法,主要是基于自车的历史车速信息来进行预测,简化了交通系统的多因素特征,忽略了前方车辆运动状态以及驾驶员意图等信息动态时变的影响。然而,汽车在行驶过程中,前方车辆的运行状态及驾驶员当前的意图需求,在很大程度上决定了未来车速的序列分布。
基于上述分析,本文针对该新型双行星排PS-HEV系统机构,首先,采用模糊推理系统对驾驶员的驾驶意图进行识别,并滚动提取固定时间窗口内的车速序列特征参数,以进行主成分及相关性分析,以此得到能保留原始数据主要信息的关键因子,并通过毫米波雷达获取车间运动特征信息。其次,将上述影响未来车速序列分布的关键信息进行融合,以此进行未来短期内的车速预测。最后,建立基于模型预测控制的能量管理策略,并在预测时域内采用动态规划算法进行最优控制量求解,实现各动力源最优转矩分配。
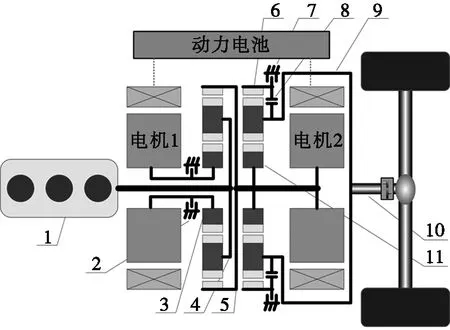
1.发动机;2.前锁止离合器LC1;3.前太阳轮S1;4.前行星架C1;5.前齿圈R1;6.后齿圈R2;7.后锁止离合器LC2;8.模式离合器;9.后行星架C2;10.输出轴;11.后太阳轮S2。
1 功率分流混合动力车辆模型
该功率分流混合动力系统采用双行星排结构,其示意图见图1。发动机通过扭转减震器与前行星架C1相连,电机1和电机2分别与前太阳轮S1和后太阳轮S2相连,系统输出轴与后行星架C2相连,双行星排之间通过前齿圈R1和后太阳轮S2相连。前锁止离合器LC1和后锁止离合器LC2分别作用于前太阳轮S1及后齿圈R2。前锁止离合器LC1用来决定电机1是否工作,发动机的锁止通过扭转减振器的锁止来实现。后行星架C2与后齿圈R2之间设有模式离合器,当处于分离状态时,后行星排各部分之间为相对自由转动;当处于接合状态时,后行星排为整体转动,前者主要适用于中低速工况,后者主要适用于中高速工况。表1为整车和动力部件参数。

表1 整车和动力部件参数
2 多源信息融合的车速预测
预测时域内的车速直接决定了预测时域内车辆的运动状态,最优转矩分配策略会根据预测期内的车速序列和车辆状态来进行。因此,通过预测得到一个相对准确的车速序列,对模型预测控制的效果有很大影响[7]。本文选取未来短时域内的车速作为预测量,并考虑车、路、人等信息动态时变的影响,依托经遗传算法优化的反向传播(back propagation,BP)网络预测模型,以提高短时域车速预测的准确性与合理性。
驾驶员是交通系统中的重要对象,而驾驶意图又作为驾驶员的动态反馈,影响着未来车速序列的分布,因此,本文首先采用模糊推理系统对驾驶员驾驶意图进行识别。加速踏板的开度代表了此时车辆的负荷需求,也简单反映了车辆加速需求的紧急程度,但仅靠开度参数不能够全面反映加速需求的特征,同时引入加速踏板开度变化率对加速意图紧急程度进行识别。加速意图输入变量的隶属度函数曲线见图2。图2a为加速踏板开度隶属度函数,从图2a中可以看出:其论域取[0,100],模糊子集为PS(正小)、PM(正中)、PB(正大),下文相同的集合不再说明。图2b为加速踏板开度变化率隶属度函数,从图2b中可以看出:其论域取[-60,60],模糊子集为NB(负大)、NS(负小)、Z(基本不变)、PS、PB。图3为加速意图输出变量的隶属度函数曲线,从图3中可以看出:其论域取[0,1.0],模糊子集为平缓、一般、紧急。表2为驾驶员加速意图识别的模糊推理规则表。

(a) 加速踏板开度隶属度函数

(b) 加速踏板开度变化率隶属度函数

图3 加速意图输出变量的隶属度函数曲线

表2 驾驶员加速意图识别的模糊推理规则表
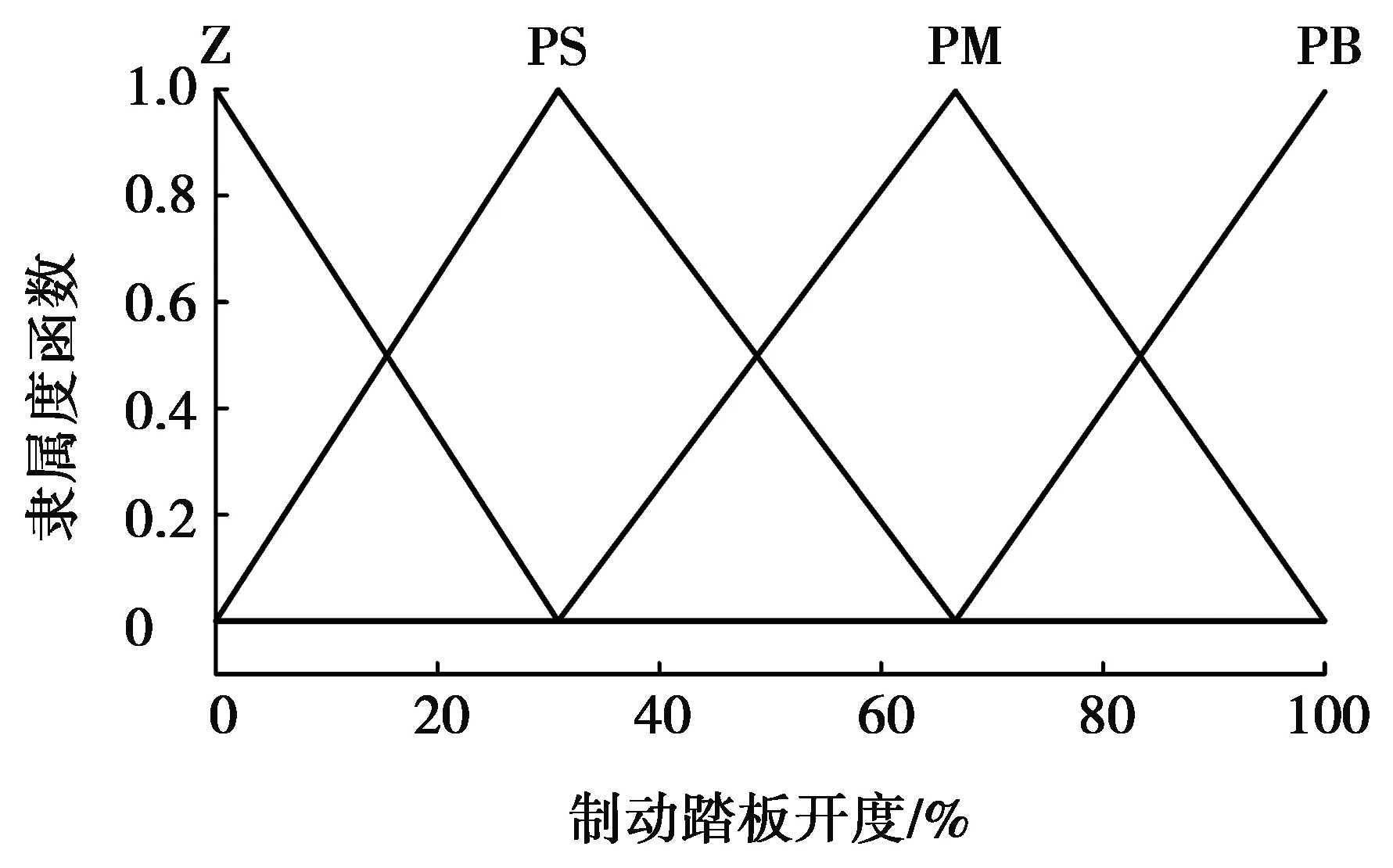
制动意图识别同样采用模糊推理系统,输入变量为制动踏板开度及制动踏板开度变化率。制动意图输入变量的隶属度函数曲线见图4。图4a为制动踏板开度隶属度函数,从图4a中可以看出:其论域取[0,100],模糊子集为Z、PS、PM、PB。图4b为制动踏板开度变化率隶属度函数,从图4b中可以看出:其论域取[-10,10],模糊子集为NB、NS、Z、PS、PB。制动意图输出变量的隶属度函数曲线如图5所示,其论域取[-1.0,0],模糊子集为NB、NM、NS、Z。表3为驾驶员制动意图识别的模糊推理规则表。
以城市道路循环工况(urban dynamometer driving schedule,UDDS)进行驾驶员驾驶意图识别,并将加速度值按照不同的意图分类归一化为(-1,1),与模糊推理值进行对比。图6为驾驶意图模糊推理识别。根据图6a,可以得到图6b中驾驶意图隶属的真实值。由图6b可以看出:驾驶意图模糊推理值与真实值变化趋势一致,且两者的均方根误差(root mean square error,RMSE)仅为0.051,能够对驾驶意图进行有效识别。
(a) 制动踏板开度隶属度函数

(b) 制动踏板开度变化率隶属度函数

图5 制动意图输出变量的隶属度函数曲线

表3 驾驶员制动意图识别的模糊推理规则表

(a) UDDS局部工况曲线
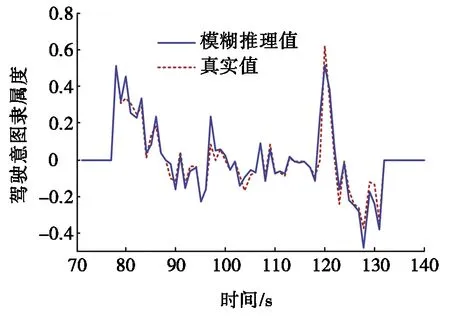
(b) 识别结果对比
车辆在实际运行过程中,自车车速很大程度上取决于前方车辆的运动状态[8-9]。采用毫米波雷达可有效获取前方车辆运动状态信息(相对车速、相对距离),常用来描述车辆间运动特征的评价参数包括跟车时距THW和避撞时间TTC,其计算公式分别为:
(1)
(2)
其中:△d为两车之间相对距离;vF为自车速度;vr为两车之间的相对速度。本文选择THW和TTC的倒数作为车速预测输入参数。
将一段连续的自车历史车速序列数据转化为少量具有代表性的关键因子,不仅可以保留原始数据的主要信息,而且能简化预测模型结构[10]。为确保信息的完整性,本文首先选取12个运动学片段特征参数对其进行描述,如表4所示。

表4 运动学片段特征参数
选取包含纽约城市循环工况、美国西弗吉尼亚大学开发的郊区工况和洲际工况,以及高速公路燃油经济性测试循环工况的综合工况,以120 s为固定取样时长,1 s时长为滚动量进行运动学片段划分,并对获得的运动学片段进行主成分分析,以找到能够区分工况差异性的关键特征参数,结果如表5所示。
根据表5的结果,选取累计贡献率已达到80%的前4个主成分代表原始变量进行分析,并进行特征参数与主成分间的相关性分析[11],从而选取具有代表性的平均速度、怠速时间、加速时间和减速时间4个关键因子。同时,车速序列数据具有连贯性,邻近的车速信息对预测时域内的车速预测具有指引作用[10],本文将选择的4个关键因子以及临近的5 s车速数据共同作为预测模型输入。

表5 主成分分析结果

图7 数据采集平台方案
本文以上述信息(12个参数)作为预测模型输入,并采用遗传算法对BP网络结构权阈值进行个体寻优计算,从而将个体包含的最优权阈值信息赋值于网络结构,神经网络模型见文献[10],不在本文详述。采用上述4种工况为训练集,UDDS工况为验证集,并联合PreScan软件、MATLAB软件及驾驶员模拟器,通过模拟真实的驾驶情景为预测模型提供数据支持,数据采集平台方案见图7。
为验证该车速预测方法的准确性,文中对仅基于自车历史车速序列的传统车速预测方法(方法1)、基于多源信息融合的车速预测方法(方法2)与本文方法(方法3)进行了不同预测时域的对比验证。图8a和图8b是方法1和方法2在预测时域为10 s的对比结果。由图8a和图8b可以看出:当车速较低时,方法1和方法2会出现过估计现象。为克服这一不足,方法3对当前采取的车速序列进行判断,若序列段末尾车速值为0 km·h-1时,将预测时域内的预测车速全部转化为0 km·h-1。图8c为方法3的预测结果,从图8c中可以看出:在怠速时刻,预测车速为0 km·h-1,更加符合实际情况。

(a) 仅基于自车历史车速序列的传统车速预测方法

(b) 基于多源信息融合的车速预测方法

(c) 改进后的车速预测方法
为进一步合理对比评价预测结果,选择均方根误差作为评价指标。表6为3种方法预测未来5 s、10 s、15 s和20 s的车速均方根误差对比情况。由表6可以看出:基于多源信息融合的车速预测方法(方法2),相对于仅采用自车历史车速序列的传统车速预测方法(方法1),在不同预测时域精度都有所提高,其中,在预测时域为10 s时,方法2相对于方法1的精度提升最大,为22.42%。通过对方法2的进一步改进,方法3相对于方法1,精度又得到了进一步的提升,在20 s时,精度提升了30.27%,说明基于多源信息融合的车速预测方法,相较于仅采用自车历史车速序列的传统车速预测方法精度得到提升。
3 基于模型预测控制的能量管理策略

表6 预测方法评价指标
模型预测控制(model predictive control,MPC)的机理为:在每一个采样时刻,首先根据当前测量值和预测模型,对未来一段时域内的输出进行预测;其次,对控制时域内的优化问题进行求解以得到最优控制序列,并将控制序列的第1元素作用于被控对象;最后,根据新的数据信息刷新优化问题并重新求解[12]。
PS-HEV的预测控制策略旨在满足各部件的约束下,根据当前车辆驾驶需求,对发动机、电机1、电机2与制动系统之间进行功率的合理分配。功率分流装置使得发动机与行驶工况实现解耦,通过调节2个电机,就可以既满足行驶需求,又使发动机始终运行在最优工作区[13]。本文基于MPC的能量管理策略架构见图9。

图9 基于MPC的能量管理策略架构
进行有限预测时域内的最优控制量求解是模型预测控制器的关键,可将面向控制的系统模型表述为:
(3)
其中:x为状态向量;u为控制向量;y为输出向量;σ为系统观测输入向量;f为系统状态转移函数;g为系统输出函数。本文选取SOC作为状态变量,发动机转矩为控制变量,车速和需求转矩为系统观测输入变量。状态变量SOC的离散表达式为:
(4)
其中:Voc、rbatt和Cbatt分别为电池开路电压、内阻以及最大容量;Pbatt为电回路负载功率。
在每一采样时刻k,预测时域内的优化目标函数为:
(5)
其中:KSOC和km为加权因子;p为预测时域;SOCr为期望的电池SOC参考值;mf为发动机燃油消耗率。
优化求解的约束条件为各动力源转矩、转速及电池SOC上下限,由于预测时域相对较小,可采用DP算法对每一阶段的决策进行求解[14-15]。
4 仿真测试及结果分析
以国家标准《中国汽车行驶工况》中的CLTC-C工况进行仿真分析,电池SOC初始值与参考值皆为60%,控制时域设置为3 s,预测时域为10 s,采样间隔为1 s。参考文献[16]的研究内容,对该整车系统所搭建的规则控制策略进行控制参数优化,通过两种控制策略的对比,验证本文所提出的预测能量管理策略对整车燃油经济性的改善。
图10为在预测能量管理策略下的车速跟踪图。由图10可以看出:实际车速与目标车速基本保持一致,跟随误差绝对值保持在3 km·h-1内,说明所提出的预测能量管理策略能很好地实现整车控制功能。图11为两种策略下的电池SOC变化对比。在整个运行过程中,SOC值被限定在参考值附近波动,预测能量管理策略终了时的SOC为0.56,而参数优化后规则控制策略终了时的SOC为0.54,说明本文的预测能量管理策略相较于参数优化后的规则策略能够更有效地保证电池的充放电平衡。图12为预测能量管理策略与参数优化后的规则控制策略在整个工况下的发动机输出功率对比情况,图13为两种策略局部800~1 200 s时的发动机输出功率对比情况。由图13可以看出:预测能量管理策略相比于优化后的规则控制策略,发动机输出功率波动更加平缓,且预测能量管理策略下的发动机开闭次数为10次,而优化后的规则控制策略为18次,预测能量管理策略降低了因发动机过多的开闭次数而造成的不必要的整车燃油消耗。
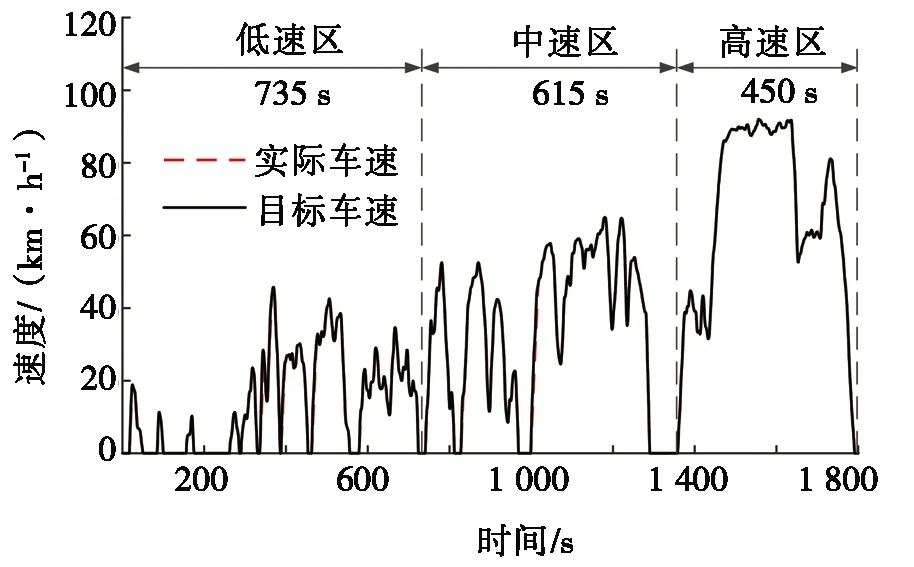
图10 预测能量管理策略下的车速跟踪图

图11 两种策略下的电池SOC变化对比

图12 整个工况下的发动机输出功率对比

图13 800~1 200 s发动机输出功率对比

图14 CLTC-C工况下的燃油消耗量对比
图14为本文预测能量管理策略和参数优化后的规则控制策略在CLTC-C工况下的燃油消耗量对比情况。由图14可以看出:两种策略的燃油消耗量分别为1.75 L和2.46 L,说明本文预测能量管理策略的燃油经济性最好。表7为两种策略分别在CLTC-C工况、新欧洲行驶循环(new European driving cycle,NEDC)工况及UDDS工况下的燃油消耗量对比。从表7中可以看出:在3种仿真工况下,本文预测能量管理策略的燃油消耗量都比优化后的规则控制策略低。相较于优化后的规则控制策略,本文预测能量管理策略的燃油消耗量在3种工况下分别降低了28.53%、23.40%和26.42%,说明本文所提出的预测能量管理策略能够进一步改善整车燃油经济性。

表7 不同能量管理策略下燃油消耗量对比
5 结论
(1)本文提出了基于多源信息融合的车速预测方法,首先,对驾驶员驾驶意图进行模糊推理识别;其次,对历史固定时间窗的运动信息进行关键运动特征参数提取,得到能够代表原始信息的关键因子;最后,通过雷达传感器获取车间运动特征信息,通过融合不同影响因素的信息,从而使车速预测更具合理性。
(2)通过分析对比仿真结果,验证了车速预测方法的有效性,精确度较传统的车速预测方法在不同的预测时域都有所提升,同时也验证了本文预测能量管理策略的有效性。在3种典型工况下,燃油消耗相比于参数优化后的规则控制策略,分别降低了28.53%、23.40%和26.42%。
