基于Chaos-RS-RBF算法的汽油机油膜动态参数辨识研究
2020-07-02徐东辉徐向阳徐新仁
徐东辉,徐向阳,徐新仁
(南昌师范学院数学与计算机科学系,南昌 330032)
汽油机发动机在瞬态工况下,由于油膜的动态平衡被打破使得空燃比控制偏离理论值允许误差范围之内,使得尾气处理装置催化氧化效率降低,排放到空气中的污染气体增多〔1〕。由于发动机系统具有高度复杂的非线性特性,燃油沉积系数X 与蒸发时间常数τ 也相应地随时间呈现非线性变化特征,很难通过直接测量的方法进行测取〔2〕。目前,主要是通过估测辨识方法对油膜动态参数进行获取,如文献〔3〕~〔5〕利用广义最小二乘法、解耦辨识法及试验标定等对油膜动态参数进行了辨识,但都存在不同程度的缺陷。试验标定法受发动机的节气门开度、冷却水温及进气管压力等相关参数的影响较大,准确标定油膜参数工作不易;而广义最小二乘法及解耦辨识法由于发动机系统具有高度复杂的非线性特性,很难实时在线对油膜动态参数进行辨识,并且预期精度也难以达到理想效果〔6-7〕。为此本文针对发动机系统的高度复杂非线性特性,提出了基于Chaos-RS-RBF(chaos-rough sets-radial basis function)算法的汽油机油膜动态参数辨识方法,在对汽油发动机动力学系统进行混沌(chaos)特性判别的基础上,利用相空间重构技术恢复系统固有的多维状态空间非线性特性,并利用粗糙集(rough sets,RS)理论进行数据挖掘,删除大量不必要的冗余数据,最后利用径向基函数(radial basis function,RBF)神经网络对多维状态空间时间序列进行辨识,获得最终的油膜动态参数辨识值。
1 相空间重构理论
由Packard 及Takens 定理〔8-9〕可知,当恰当地选定嵌入维数与时间延迟后可以把系统有规律的轨道(吸引子)恢复出来,且与原系统具有微分同胚性。汽油机发动机动力学系统具有高度复杂的非线性特性,为此主要研究目的是应用相空间重构技术将汽油机动力学系统的一维数据反向构造出多维状态空间时间序列数据,恢复系统固有的多维非线性特性,采用RBF 网络对重构后的时间序列进行辨识。
假定{x(ti)},(i=1,2,…,N)为通过标定方法获取到的一维时间序列,则当嵌入维数m 与时间延迟τ恰当选定后,可将{x(ti)},(i=1,2,…,N)延拓成m维相空间时间序列,即为:

式中,τ=kΔt,Δt为采用时间间隔;k为整数。
2 粗糙集理论
2.1 粗糙集基本概论1982年,Z.Pawlak提出RS理论,它是基于不可分辨性思想和知识简化对不完整数据进行分析、推理、学习及发现,进而从中发现隐含的知识,揭示潜在的规律〔10-11〕。目前,该理论已成功应用在决策分析、过程控制与数据挖掘等领域,主要是发现不确定数据或者噪声数据之间的联系。
定义1 知识库〔12〕:假定U 为包含了一组对象的有限且非空集合的一个论域,S 为U 上的等价关系簇。则K=(U,S)(二元组)为U上一个近似空间,也即为一个知识库。
定义2 不可分辨关系〔12〕:设S 为U 上的等价关系簇,若∃P ≠ϕ,且P ⊆S,则⋂P 也是U 论域上的一个等价关系集合,也即是P上的不可分辨关系,简称为P,记作IND(P)。

定义3 知识的约简〔12〕:假定K=(U,S)为知识库,K 上的一个等价关系簇P ⊆S,对任意P 的子集G,若G满足下列条件:
1)G是独立的;

则G为P的一个约简,简称为G=RED(P),而RED(P)是P的全体约简的一个集合。
定义4 知识的核〔13-14〕:假定K=(U,S)为知识库,K上的一个等价关系簇P ⊆S,∀R ∈P,若成立:

则R为P中必要的,且由P中全部必要的知识组成的集合称为P的核,简单记为CORE(P)。
定义5 决策表〔13-14〕:将决策表DT定义成一个五元组DT=(U,C,D,V,f),其中:
1)U:U={x1,x2,…,xn}为非空的有限集合,由n个对象组成,通常称作论域;
2)C:C ={ α |α ∈C}为条件属性集合,C ≠ϕ,∀αj∈C(1 ≤j ≤m)为C中的一个简单属性;3)D:D={ d |d ∈D}为决策属性集,D ≠ϕ,且C ⋂D ≠ϕ;
4)V:V=⋃Vα(∀α ∈C ⋃D)为信息函数f的值域,通常由Vα表示;
5)f :f={ fα|fα:U →Vα,∀α ∈C ⋃D}为DT的信息函数,而fα为属性α的信息函数。
定义6 区分矩阵〔13-14〕:对于决策表(U,A,C,D),T=U={μ1,μ2,…,μn}是论域,A=C ⋃D,C ⋂D=ϕ,C 为条件属性集,D为决策属性集,决策表T的区分矩阵M(T)是一个n×n矩阵,其任一元素为:

其中,i,j=1,2,…,n。
2.2 基于区分矩阵的数据约简算法
定理1 在相容决策表中,决策表的相对D 核等于该决策表的区分矩阵即Mn×n中所有单个属性元素组成的集合〔13-14〕

数据约简算法步骤如下:
步骤1:根据相关定义,计算得出区分矩阵Mn×n;
步骤2:计算决策表的相对核CORED(C),令B=CORED(C);
步骤3:对任意cij,(i,j=1,2,…,n)若cij⋂B ≠ϕ,否则cij=ϕ;若cij=ϕ成立,则转到步骤5;反之转步骤4;
步骤4:统计当前矩阵Mn×n中每个属性出现的次数,选取出现次数最多的元素为αm,令B=B ⋃{αm}转到步骤3;
步骤5:输出B ∈REDD(C),算法结束。
3 Chaos-RS-RBF模型建立
3.1 RBF神经网络RBF神经网络〔15〕是一种具有单隐含层的前馈式网络,网络结构如图1所示。它由输入层、隐含层及输出层等组成三层网络结构形式,其中输入层到隐含层的映射呈非线性,而隐含层和输出层为线性映射。它具有较好的任意非线性逼近能力及较快的学习收敛速度,且训练方法快速易行。目前RBF神经网络主要应用于处理内在规律未知的系统中,如模式识别、非线性系统预测等。
RBF神经网络模型中输入层节点个数与嵌入维数m相同,即为各子序列嵌入维数的总和m=m1+m2+…+mM,隐层节点(也称RBF 节点)由径向基函数构成,其神经元个数通常经在线动态调整而获得(一般为调节隐含层节点神经元的个数使RBF神经网络模型辨识精度达到最高时所对应的神经元个数,即为隐含层节点神经元的个数),而输出层一般为简单的线性函数,本文的目的是得到单一的油膜参数值,因此输出层神经元数目为1。

图1 RBF神经网络模型
图1 中,xi,j为输入变量,i=1,2,…,M,j=(mi-1)τi+1,…,N,输入层神经元个数为m=m1+m2+…+mM;w=[ w1, w2,…,wM]T为输出层的权值向量;x1,n+1为输出层的最终输出值。
隐含层高斯函数ϕ(x)表达式如下:

式中,Vn=(x1,n,x1,n-τ1,...;xM,n,xM,n-τM,...;xM,n-(M-1)τM)为第n 个网络输入训练样本;Cj为Gauss 函数的中心;σj为Gauss函数的宽度。
RBF神经网络模型输出函数如下式所示:

式中,k为隐含层节点数。
RBF神经网络误差定义为:

式中,x1,j+1为实际负荷值;k为网络训练样本总数。
总误差E(能量函数)如下所示:

本文在RBF神经网络的训练与学习过程中,根据梯度下降法对隐含层中Gauss函数的两个参数(基函数中心Cj及宽度σj)及输出层的权值wj进行修正调整,使式(10)中的总误差E 尽可能最小,以实现提高RBF 神经网络辨识精度的目的〔15〕。具体如下:

其中修正变量:

式中,n为迭代步数;ϕ′(·)为ϕ(·)的导数;j=1,2,…,k为隐含层节点;j=(mi-1)τi+1 为重构起始相点;η1、η2、η3为学习步长,一般相互不相同,且0 <η1<1,0 <η2<1,0 <η3<1。
RBF神经网络算法收敛条件为:

式中,ε为给定允许误差,一般为很小的正数。
3.2 Chaos-RS-RBF 辨识模型建立为提高油膜动态参数辨识精确度,建立了如图2 所示的油膜动态参数辨识模型。本文通过数据采集系统分别采集喷油脉宽、节气门开度、转速、冷却液温度及进气管压力等数据,并进行归一化处理,根据相空间重构理论进行数据重构恢复系统原理的非线性特性,经过时域及频域分析后提取信息决策表,通过粗糙集属性约简处理,删除大量不必要的冗余数据,得到决策表约简,将通过粗糙集处理后的数据作为RBF网络的输入向量,对其进行训练及辨识获取油膜动态参数辨识值。

图2 油膜动态参数辨识模型结构图
图2 中,U(t)为喷油脉宽;α为节气门开度;ω(t)为转速;Tcool为冷却液温度;Pm为进气管压力。
假设通过数据采集系统得到的油膜动态参数一维混沌时间序列为{ x1, x2,…,xN},利用RBF模型采用一步辨识法对上述时间序列进行辨识,具体如下:
1)通过相空间重构获得k 个点的m 维RBF 模型的训练数据(m <k <N,m ≥2d+1,d 为混沌系统维数),输入分别是X1=(x1,x2,…xm),X2=(x2,x3,…xm+1),…,Xk=(xk,xk+1,…xk+m),对应的理想输出是:Y1=xm+1,Y2=xm+2,…,Yk=xk+m+1。
2)将上面各输入按顺序输入RBF网络,得到理想的输出为Y1,Y2,…,Yk,由此可得经训练后的网络模型为:

上式中,Xi=(xi,xi+1,…,xi+m),Yi=xi+m+1,1 ≤i ≤k。
3)由一步辨识法,则

即

同理

以此类推可得最终辨识值。
4 辨识模型仿真验证
4.1 时间序列的混沌判定本文采用Lyapunov指数法判断汽油发动机动力学系统是否具有混沌特性,并且利用Kim等〔16〕和胡忠录等〔17〕提出的C-C方法计算延迟时间τ及嵌入维数m。
利用上述方法求得τ=2,σw=14,时延2d,嵌入维数为m=8。由τ=2,m=8,得出最大Lyapunov 指数为0.029 7,略比0大,由此可知汽油发动机动力学系统具有混沌特性,可以对汽油发动机油膜参数进行短期辨识。
4.2 燃油阶跃补偿技术的标定为验证Chaos-RS-RBF 模型、RBF 神经网络及最小二乘法等方法的辨识精准度,本文中采用燃油阶跃补偿技术对油膜动态参数进行试验标定。
为减少进气道壁对试验数据采集的影响,在标定过程中首先将进气道壁温保持在(50±1)℃范围内,采取两种方案进行试验标定。第一种方案:先调节DWl25 型电涡流测功机的激励电流使转速维持在2 000 r∕min 的转速点上,使节气门保持在10%开度值,并稳定运行一段时间,然后保持发动机2 000 r∕min转速不变,使节气门开度以10%变化率开启到80%开度处,并在节气门各开度处稳定运行一段时间后再进行数据采集,每次除采集X 与Y(通过变换后可得到τ)值以外,还同时采集α(t)、ω(t)、U(t)、Tcool及Pm等数据。第二种方案:先调节DWl25 型电涡流测功机的激励电流使转速维持在2 000 r∕min 的转速点上,使得节气门保持在10%开度值,并稳定运行一段时间,然后保持发动机2 000 r∕min 转速不变,以10 ℃的温度变化率调节冷却水温度,从10 ℃增加到80 ℃,并在各温度点稳定运行一段时间后再进行数据采集,每次除采集X 与Y(通过变换后可得到τ)值外还同时采集α(t)、ω(t)、U(t)及Pm等数据。
4.3 试验仿真Chaos-RS-RBF 模型中RBF 神经网络选为8-12-1的3层结构形式,其中输入层神经元个数与相空间重构嵌入维数保持一致,故确定为8,中间层神经元个数通过试凑法获得,允许误差设定为0.001。为验证Chaos-RS 能有效提高Chaos-RS-RBF 模型的辨识精确度及收敛速度,本文直接将未经处理的试验数据作为RBF 的训练样本,且RBF 神经网络同样选择8-12-1的3层结构形式,允许误差设定为0.001,然后选取2 000 r∕min转速点下的标定值作为RBF 网络检验样本。经Matlab 软件下的Simulink 仿真得到随节气门开度变化下的燃油沉积系数X辨识结果如图3所示,油膜蒸发时间常数τ辨识结果如图4所示。
由图3、4和表1、2可知,在随节气门开度变化下的油膜动态参数辨识仿真试验中,Chaos-RS-RBF模型与试验标定值之间误差最小,RBF神经网络辨识法误差次之,最小二乘法误差最大;Chaos-RSRBF 模型具有精度高、收敛快、泛化能力强等特点,表明了Chaos-RS 能有效提高RBF 的辨识精度及收敛速度。最小二乘法存在收敛速度慢,易陷入局部极小化等缺陷,常用于实验室对油膜参数推算,无法实现工程实际应用。

图3 燃油沉积系数X的辨识值(n=2 000 r∕min)

图4 油膜蒸发时间常数τ的辨识值(n=2 000 r∕min)
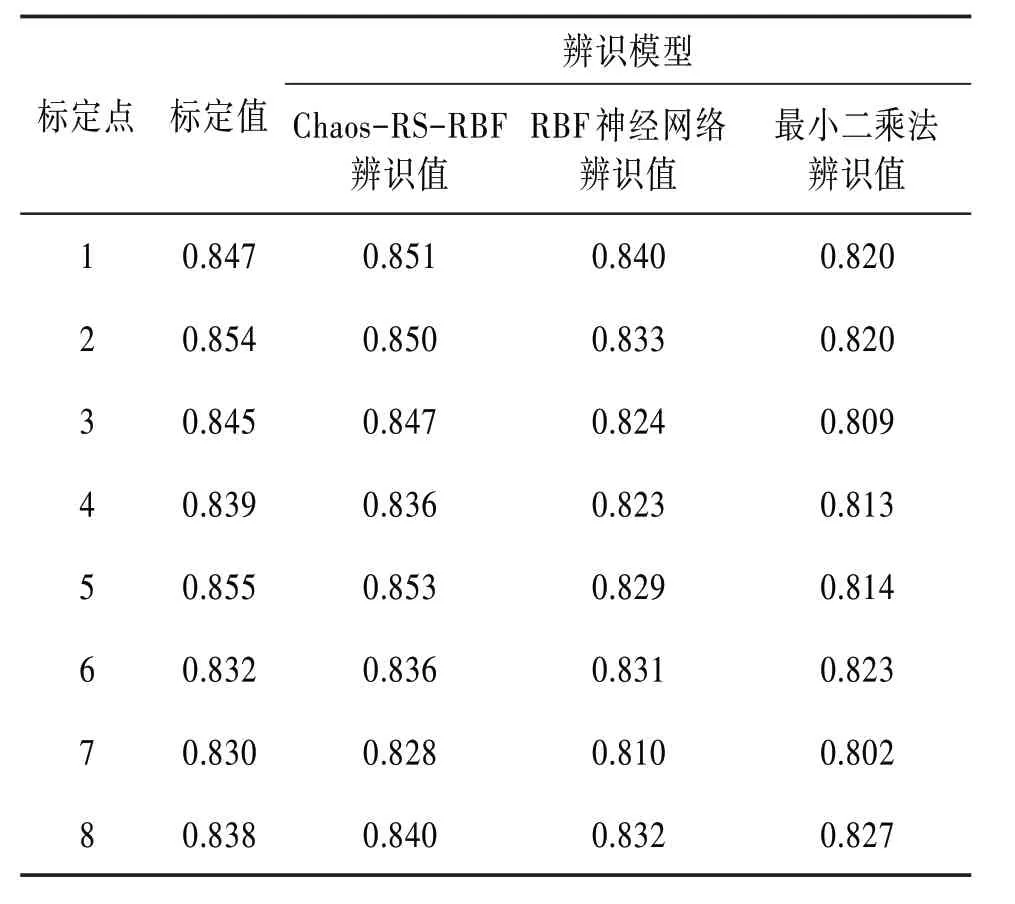
表1 Chaos-RS-RBF与RBF、最小二乘法对燃油沉积系数X的辨识值(n=2 000 r∕min)

表2 各估测模型的误差分析对比表(n=2 000 r∕min)
在油膜动态参数随冷却水温变化的仿真辨识中,RBF 神经网络保持上述一致配置,经Matlab 软件下的Simulink仿真得到在冷却水温变化情况下燃油沉积系数X 在不同辨识模型下的辨识值如图5 所示,油膜蒸发时间常数τ 在不同辨识模型下的辨识值如图6 所示。由图5、6 及表3、4 再次验证了本文提出的Chaos-RS-RBF 算法的辨识精确度比最小二乘法辨识模型及RBF神经网络更高。

图5 燃油沉积系数X的辨识值(n=2 000 r∕min)
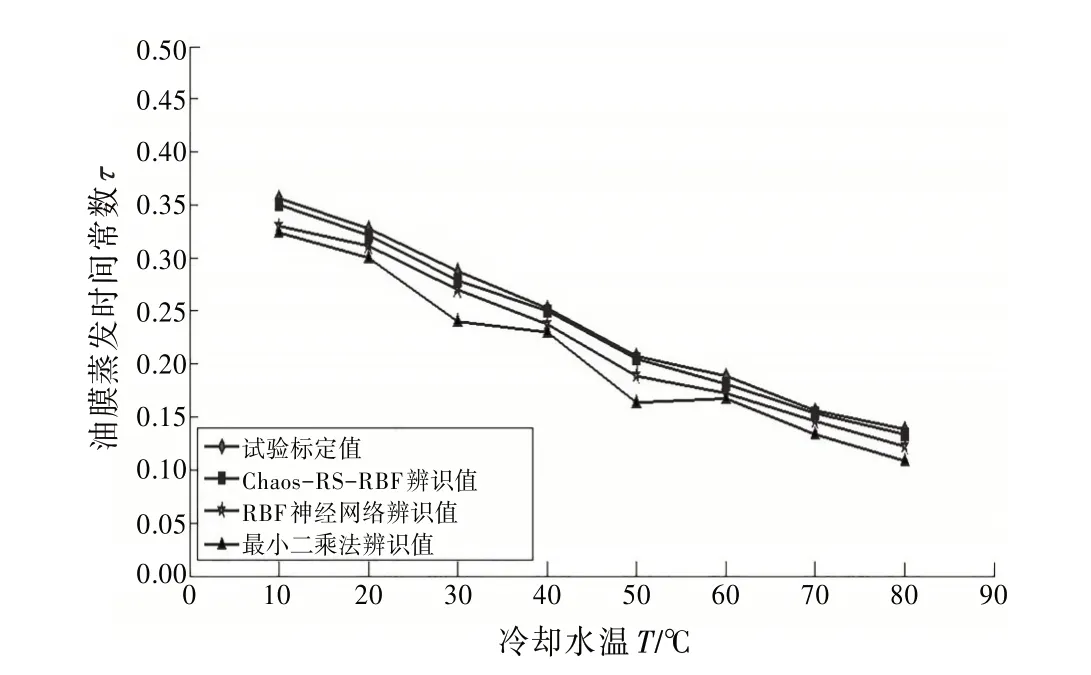
图6 油膜蒸发时间常数τ的辨识值(n=2 000 r∕min)
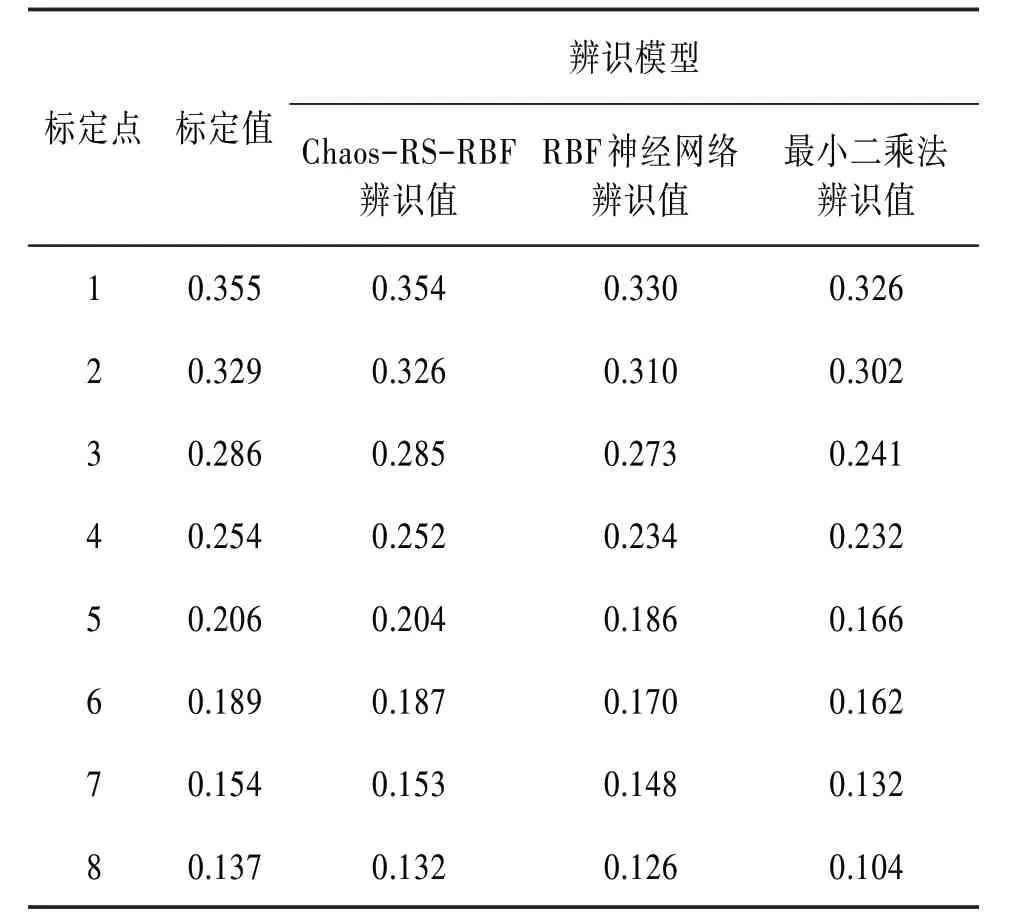
表3 不同辨识模型对油膜蒸发时间常数τ的辨识值(n=2 000 r∕min)

表4 不同辨识模型对油膜蒸发时间常数τ的辨识误差(n=2 000 r∕min)
5 结论
(1)对汽油发动机动力学系统进行了非线性动力学分析,并判定了其混沌特性。利用相空间重构技术将一维时间序列重构成多维状态空间的时间序列,有效恢复了汽油发动机固有的高度复杂的非线性特性,并且扩大了RBF 神经网络模型训练样本空间。
(2)利用粗糙集理论对时间序列数据进行处理,删除大量冗余数据,有效提高了RBF 神经网络模型训练及预测数据的精度。
(3)在Matlab 仿真环境下对Chaos-RS-RBF 算法进行了验证,结果显示该算法能较好地提高油膜动态参数的辨识精度,明显优于最小二乘法及RBF神经网络,表明了该算法具有较好的辨识能力,较强的学习与泛化能力,对实际工程应用具有较好的借鉴意义。
