轮毂驱动电动汽车复合制动防抱死协调控制及舒适性研究
2020-06-29于汇泳侯锁军
刘 刚,于汇泳,侯锁军
轮毂驱动电动汽车复合制动防抱死协调控制及舒适性研究
刘 刚,于汇泳,侯锁军
(河南工学院 车辆与交通工程学院,河南 新乡 453003)

车辆动力学;防抱死控制系统(ABS);滑模控制算法;复合制动
轮毂电机驱动电动汽车的发展,可以有效应对汽车尾气排放造成的环境污染等问题。电动汽车多采用制动能量回收技术以有效节省能源,但制动能量回收技术中的电机制动存在转矩不足的问题,多数研发机构采用液压-电机复合制动系统来改善这一问题。
国内外研究者针对轮毂电机驱动电动汽车的制动系统进行了广泛深入的研究。美国研究者对电动汽车制动时四个车轮制动力分配进行了研究;韩国研究者提出了基于最优解的电机制动力和液压制动力分配方法,并进行了仿真和实车实验[1];国内吉林大学研究团队设计了纯电动汽车的再生制动控制策略[2];清华大学研究者针对电动汽车驾驶员的制动意图以及再生能源回收问题设计了基于最优控制的控制策略[3]。
目前,国内外研究者多针对电动汽车的再生能量回收问题进行研究,而对复合制动系统以及舒适性问题研究较少。在液压制动-电机复合制动方面,液压制动系统和电机制动系统之间存在相互干涉的现象而导致再生制动能量回收率低,且会造成电动汽车制动安全性低的问题。在舒适性方面,传统车燃油车由于液压制动会导致轮缸压力出现频繁变化,因而产生噪声大和制动踏板抖动的问题,影响汽车制动舒适性。针对复合制动协调控制问题和舒适性问题,本文进行了相关研究。
1 控制策略总体架构
本文设计的分布式轮毂电机驱动电动汽车复合制动系统如图1所示,复合制动系统主要由电机制动系统和液压制动系统构成,两大制动系统包括了轮毂驱动电机、液压调节单元、踏板行程传感器、电机及逆变器控制单元、再生制动控制器等模块。液压制动系统主要是由电磁阀来控制制动液流入制动轮缸的流量。电机再生制动的控制主要是由再生制动控制器来实现。
在分布式轮毂电机驱动电动汽车复合制动系统中,液压制动子系统是复合制动系统的关键部件,如图2所示。液压子系统包括传统燃油车的制动操作机构和液压调节单元。其中的液压调节单元有别于传统车防抱死控制系统(Anti-lock brake system,ABS)液压调节单元,液压调节单元由两个高压蓄能器和2个回路控制阀构成,回路控制阀通过配合高压蓄能器来实现制动液的通断,从而产生复合制动的基础制动力矩。高压蓄能器在液压制动时主要有两个作用:一是当处于纯电机制动时,驾驶员踩制动踏板产生的制动液暂时存储在高压蓄能器中;二是当轮毂电机进行制动时存在制动力不足或者制动故障问题时,存储在高压蓄能器中的制动液能够迅速通过回路控制阀流入制动轮缸,实现车辆的目标制动力需求。
汽车在制动中,所需的制动转矩一般低于200N.m,而轮毂电机制动时产生的制动转矩高达360N.m,因此轮毂电机可满足制动需求。在高强度制动时,ABS介入,液压制动子系统负责提供基础力矩,轮毂电机制动则依据当前制动工况进行制动力矩调节,避免轮毂电机电动汽车出现抱死状况。ABS介入时以电机制动为主,以减少液压制动力调节,避免制动液在增压过程中出现流体噪声和制动踏板振动情况,这样可有效改善轮毂电机电动汽车ABS介入时的舒适性。ABS协调控制策略如图3所示,车辆制动时所需的总制动力矩smc由滑模算法根据车辆状态参数和车轮轮速计算得到,总制动力矩中轮毂电机制动力和液压系统制动力之间的比例由模糊算法依据制动踏板位移和电池SOC(电荷状态参数,state of charge)值确定。轮毂电机制动力和液压制动力依据比例作用于轮毂电机电动汽车的车轮上,以实现制动和ABS介入。
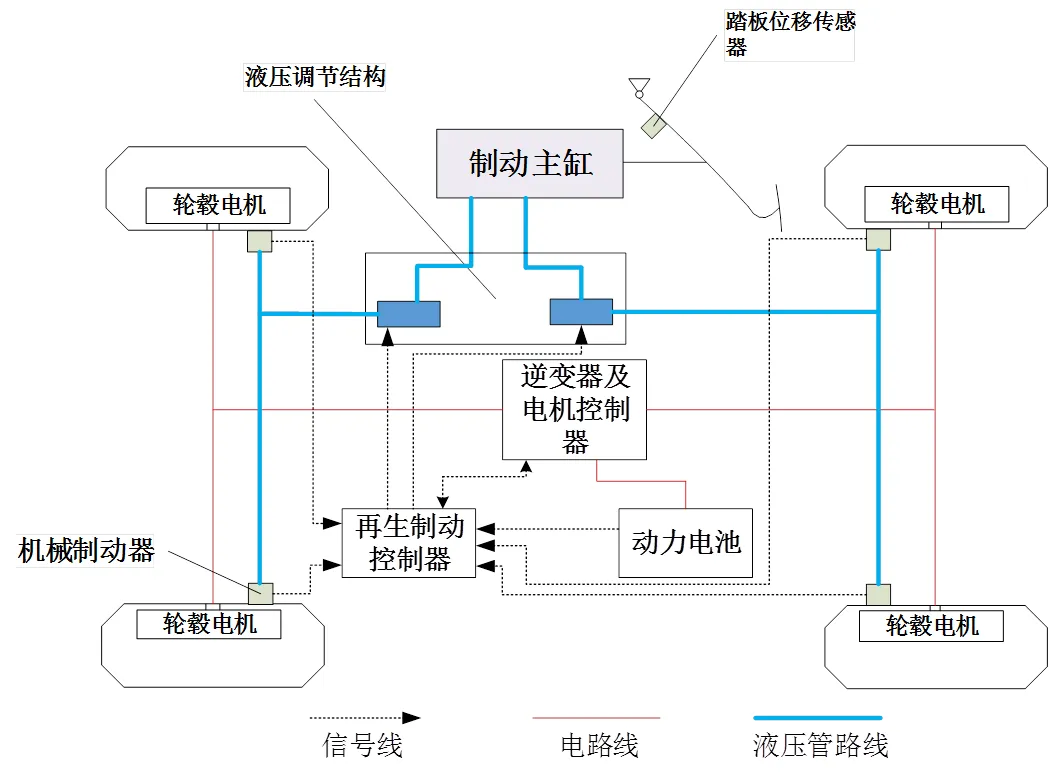
图1 轮毂电机驱动电动汽车复合制动架构图
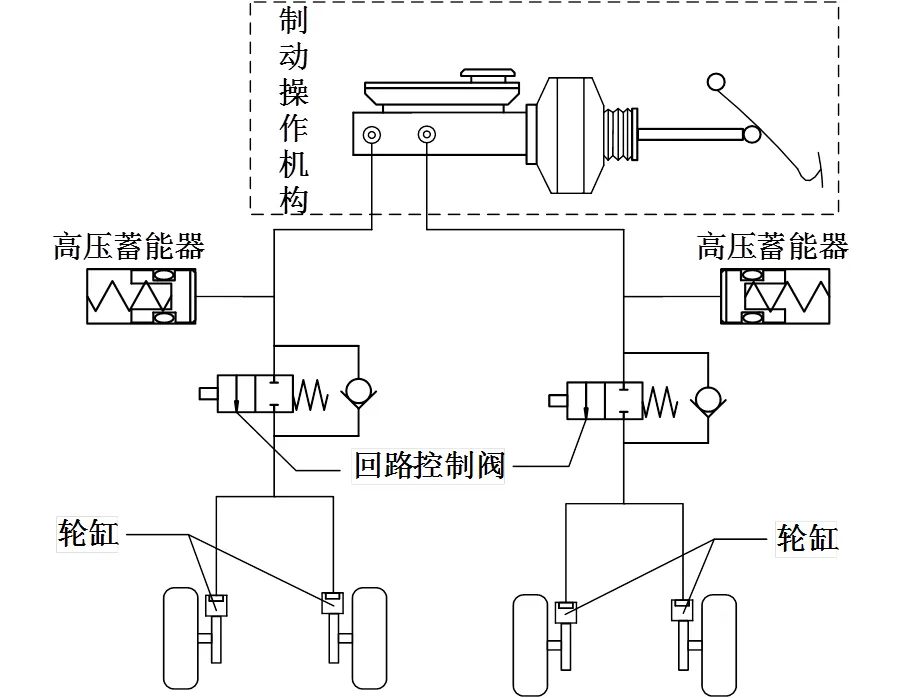
图2 液压制动子系统设计图
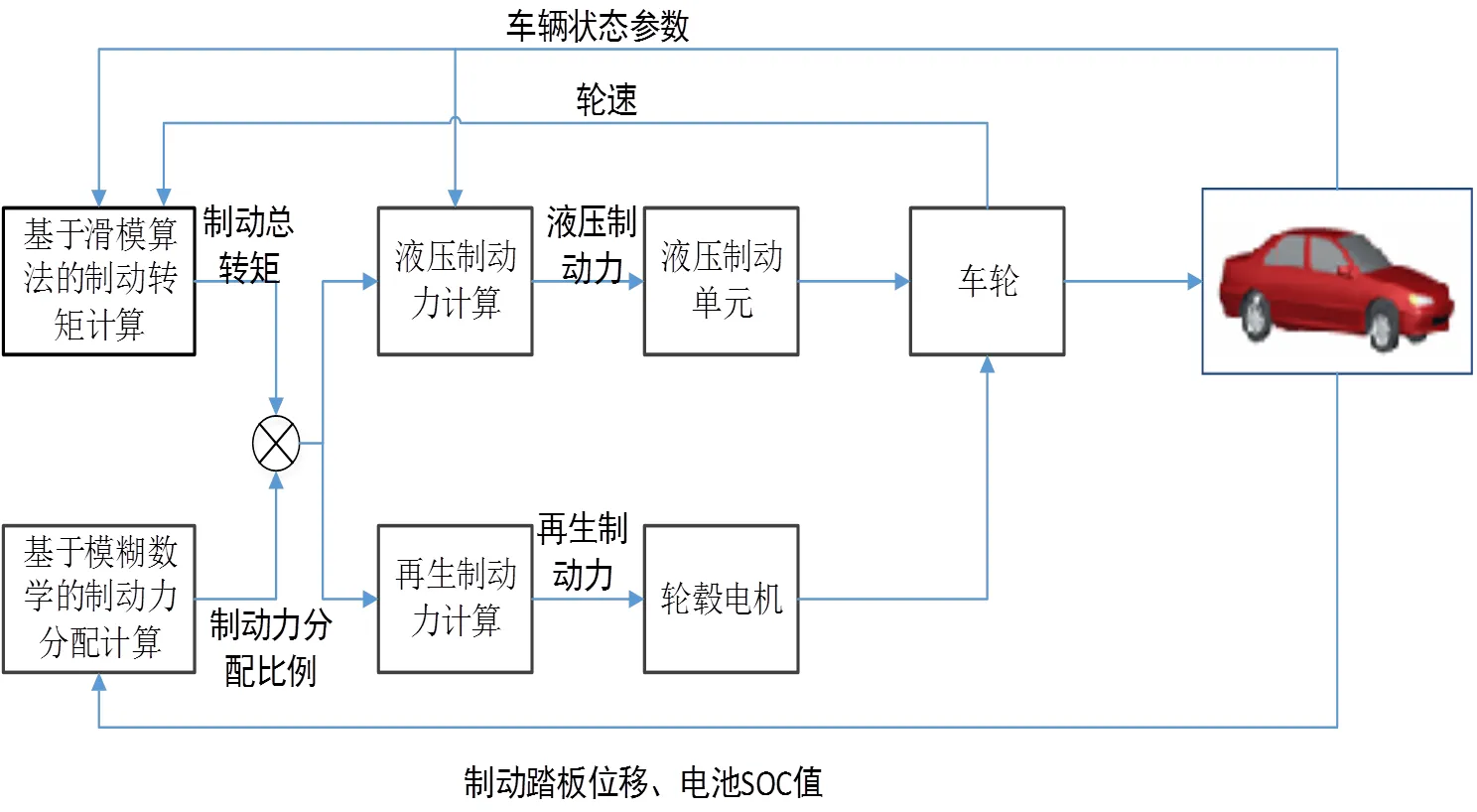
图3 复合制动系统控制策略架构图
2 电动汽车复合制动防抱死协调控制策略设计
2.1 复合制动系统制动模式判断

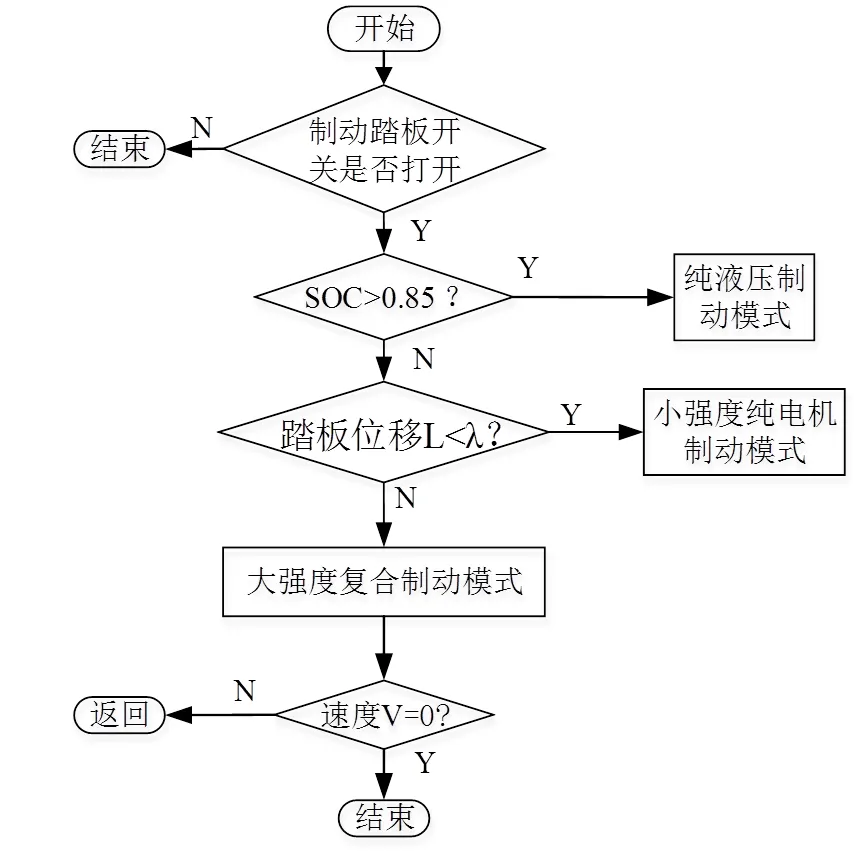
图4 驾驶员制动强度判断流程图
2.2 基于滑模算法的制动转矩计算
高强度制动往往伴随着ABS介入,此时复合制动系统控制器依据当前制动工况下的车辆状态参数,利用滑模算法,来计算当前车辆所需的制动总转矩。车轮模型采用单轮模型,如图5所示,依据动力学理论,可知车轮在制动工况下的方程为:
纵向制动力和滑移率可以表示为:
滑模算法的切换函数可以表示为:

整理可得:

式中,为消除滑模算法引起抖振时的边界层。
2.3 基于模糊数学的制动力分配比例计算

依据上述分析可知,制动踏板行程和电池SOC越小,说明电机制动在总制动转矩中的占比越高,从而越能保证高效回收能量,因此模糊规则如表1所示。
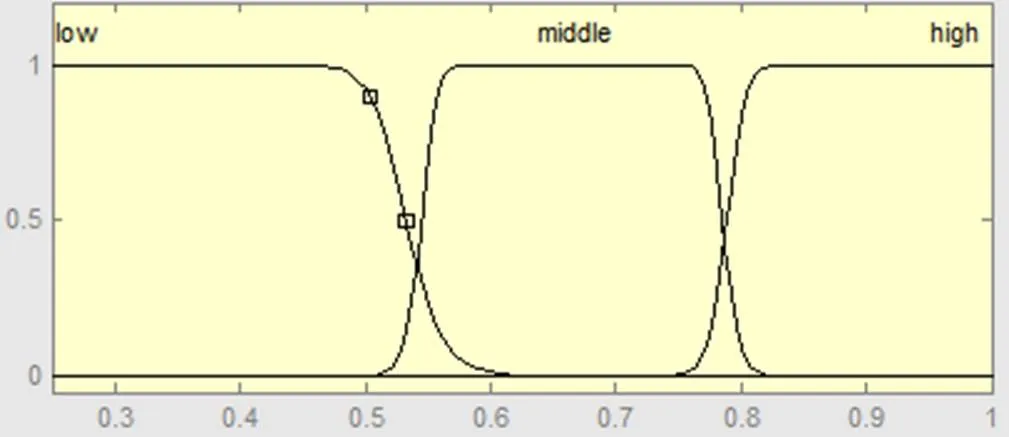
图6 输入变量1隶属度函数图
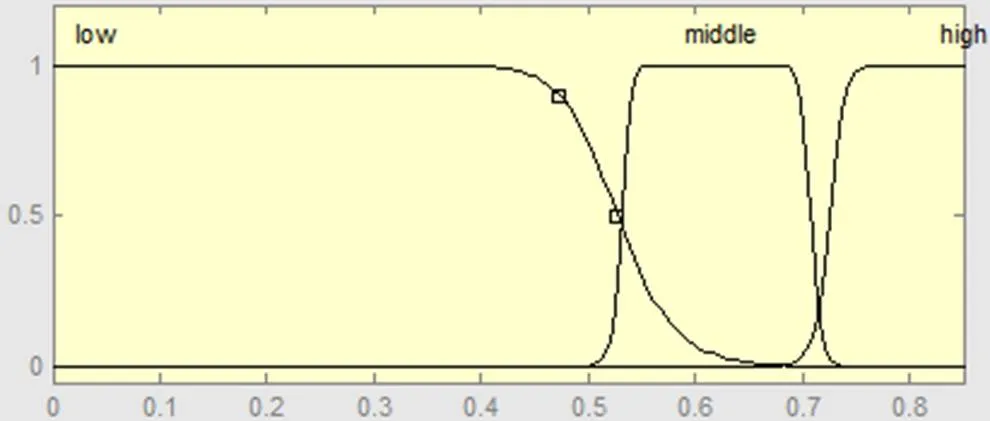
图7 输入变量2隶属度函数图
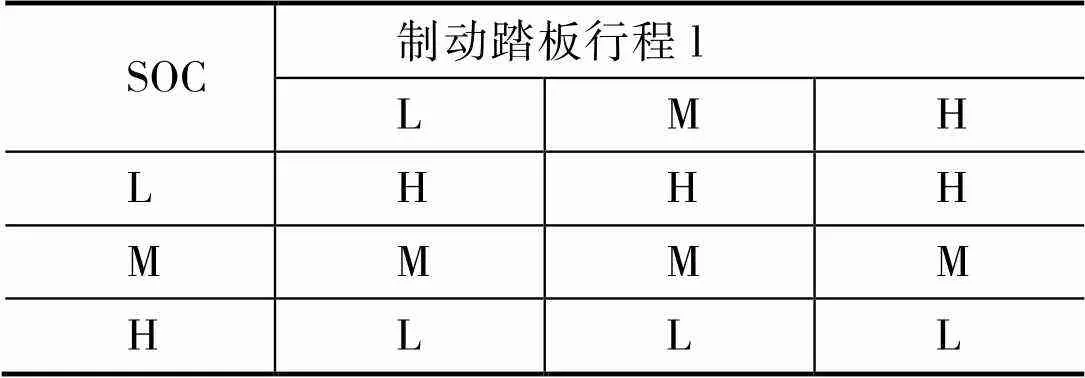
表1 模糊控制规则

3 软件联仿
本文搭建了基于Matlab/Simulink、Carsim车辆仿真软件和Lab Amesim液压仿真软件的联合仿真平台。整个软件联合仿真平台架构如图8所示。制动协调控制策略部分和轮毂电机模型均采用Matlab/Simulink软件建模,液压调节单元采用Lab Amesim建模,电动汽车模型采用Carsim建模。制动轮缸压力控制和轮缸估计模块具体算法及建模参考文献[4],传感器和观测器算法参考文献[5]。仿真验证分别进行了高低两种附着路面的紧急制动验证。
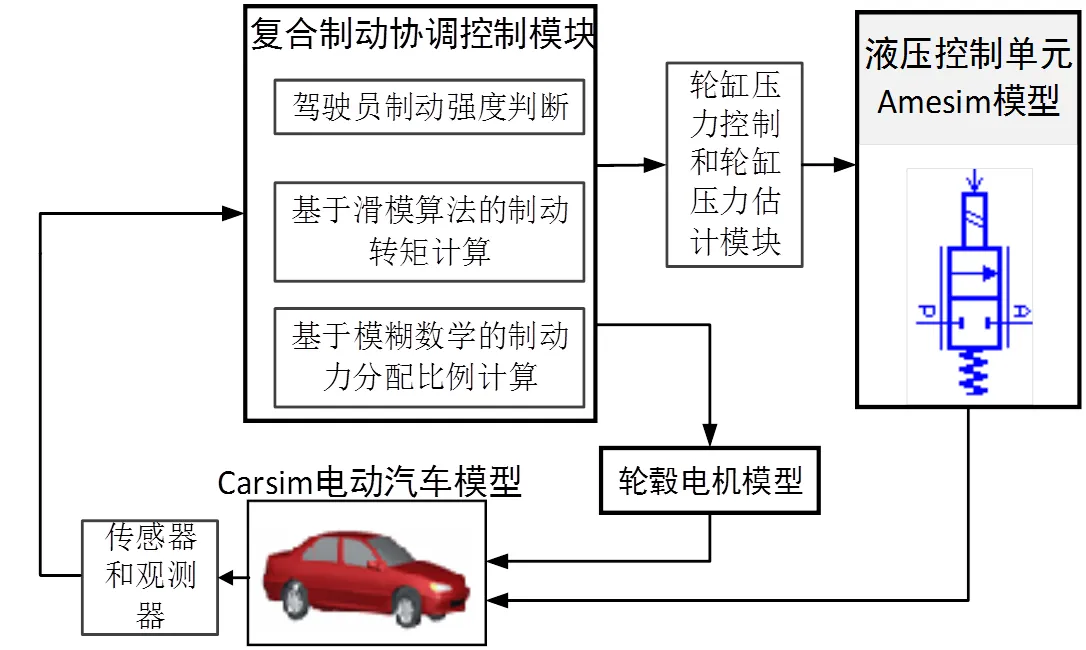
图8 复制制动控制策略联合仿真验证方案
3.1 低附着路面制动验证

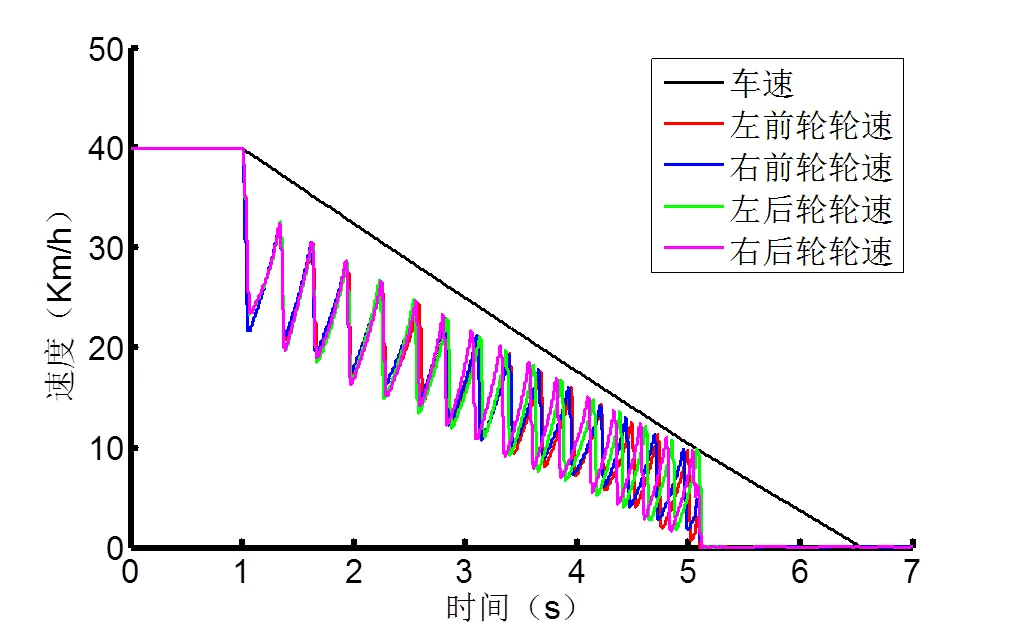
图9 低附着工况车辆参考车速和轮速数据曲线
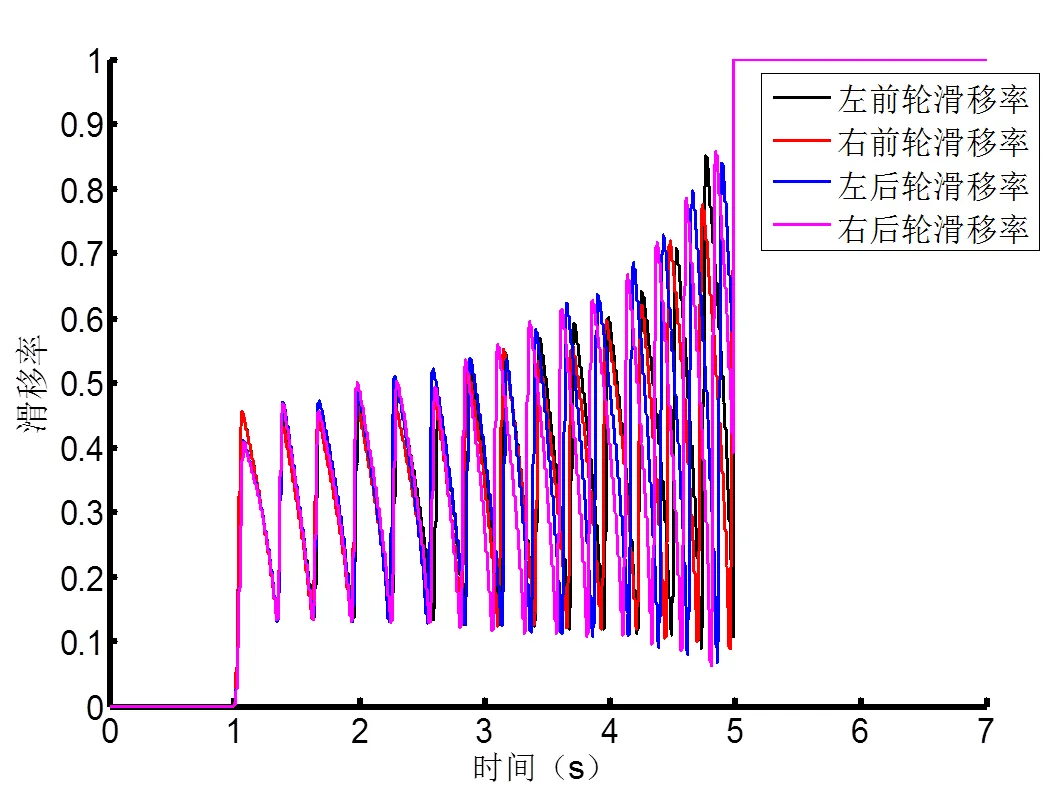
图10 低附着工况滑移率曲线
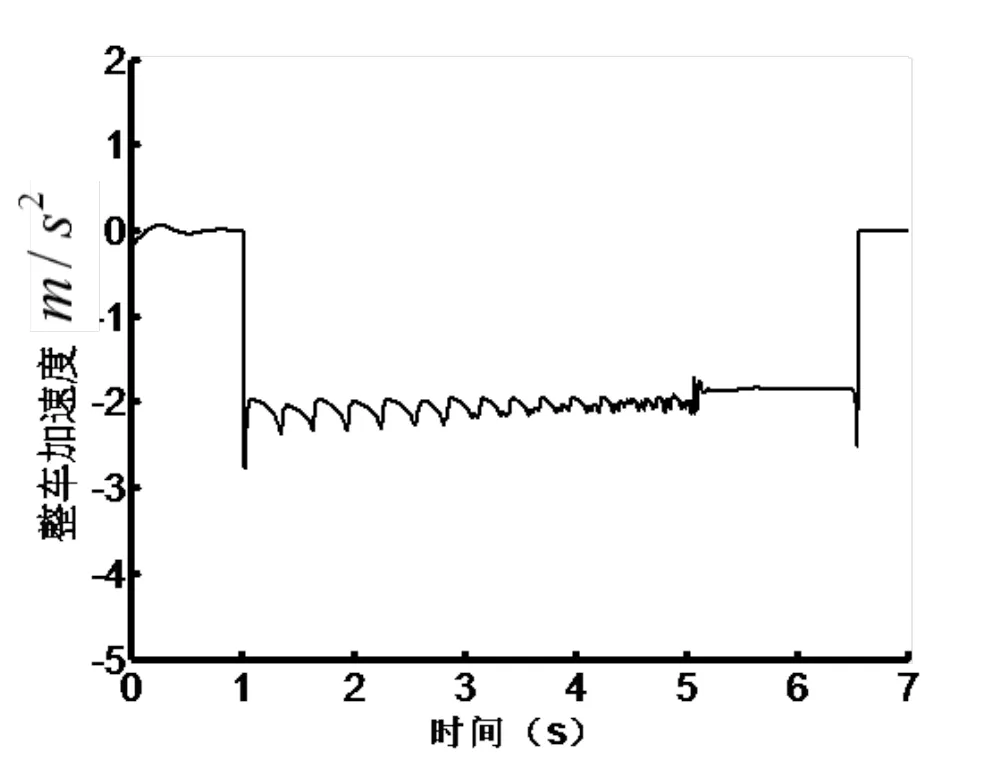
图11 低附着工况车辆加速度曲线
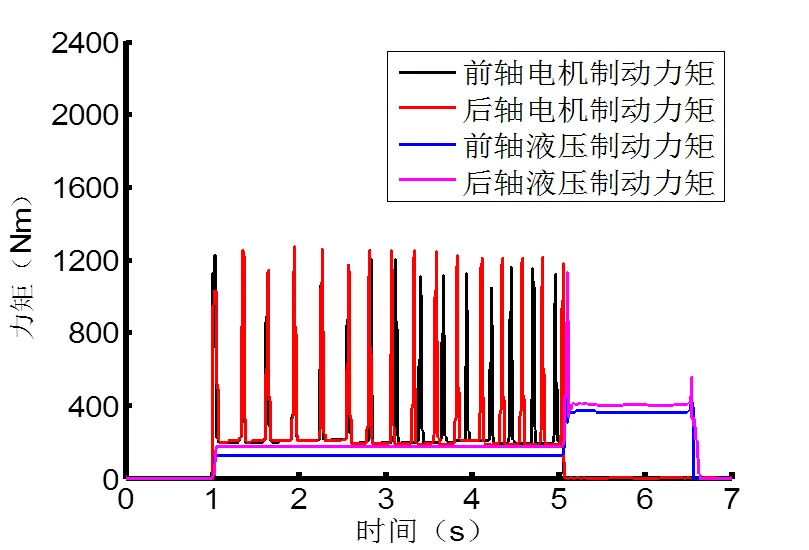
图12 前后轴电机制动转矩和液压制动转矩曲线
3.2 高附着路面制动验证
第二组仿真主要是模拟在高附着路面高速行驶的汽车紧急制动工况,车辆制动初速度为117Km/h,路面附着系数为0.8。从图13可以看出,从1s开始直到制动结束,车辆轮速始终密切跟踪车速。图14所示为滑移率,表明四个车轮均未出现车轮抱死。图15所示表明电动汽车加速度为-7.8m/s2左右。图16所示为前后轴电机制动转矩和液压制动转矩曲线,可以看出在ABS介入前期,液压制动始终以基础制动为主,主要依靠电机转矩调节车轮转速,液压轮缸压力基本保持不变,此时电磁阀无动作,制动踏板不会跟随轮缸压力变化产生高频振动,增强了制动踏板的舒适性。
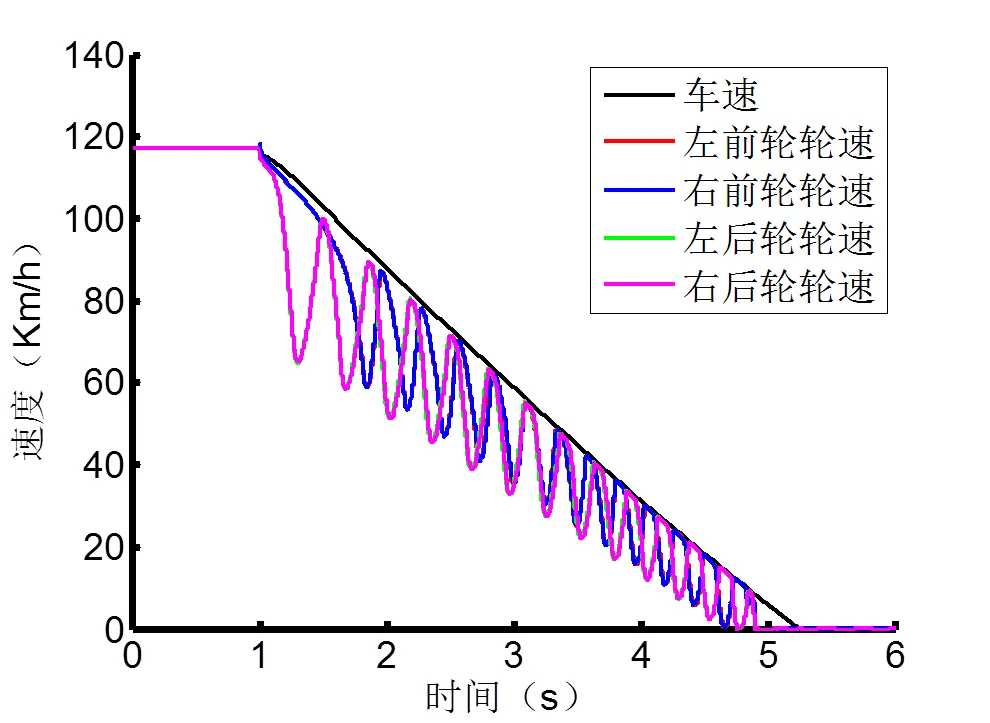
图13 高附着工况车辆参考车速和轮速数据曲线
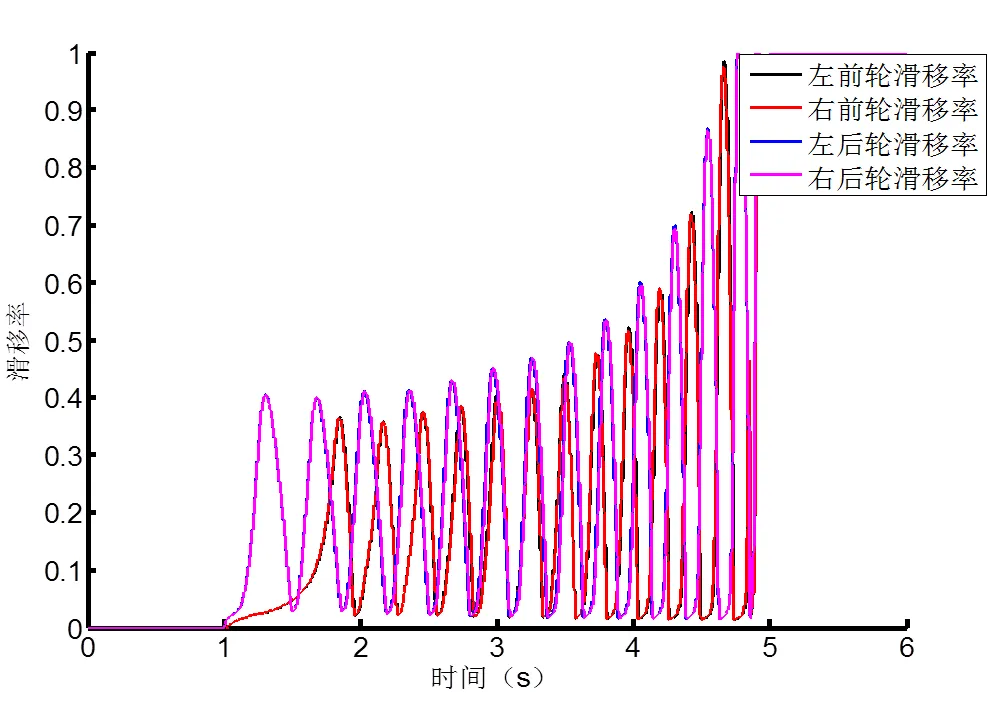
图14 高附着工况滑移率曲线
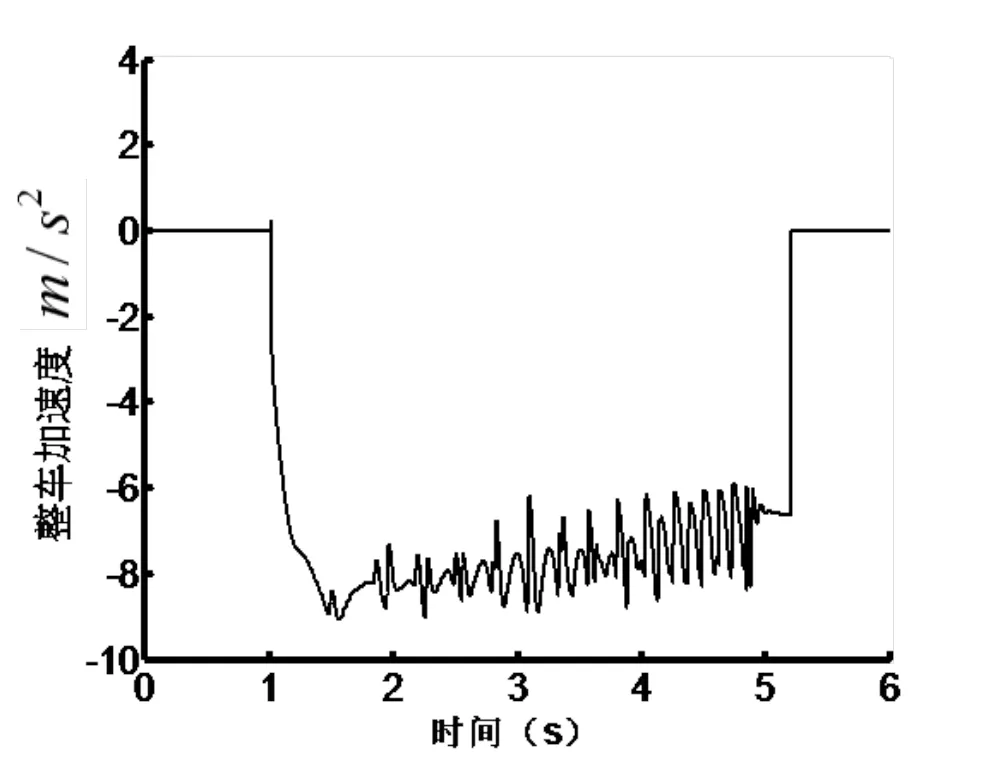
图15 高附着工况车辆加速度
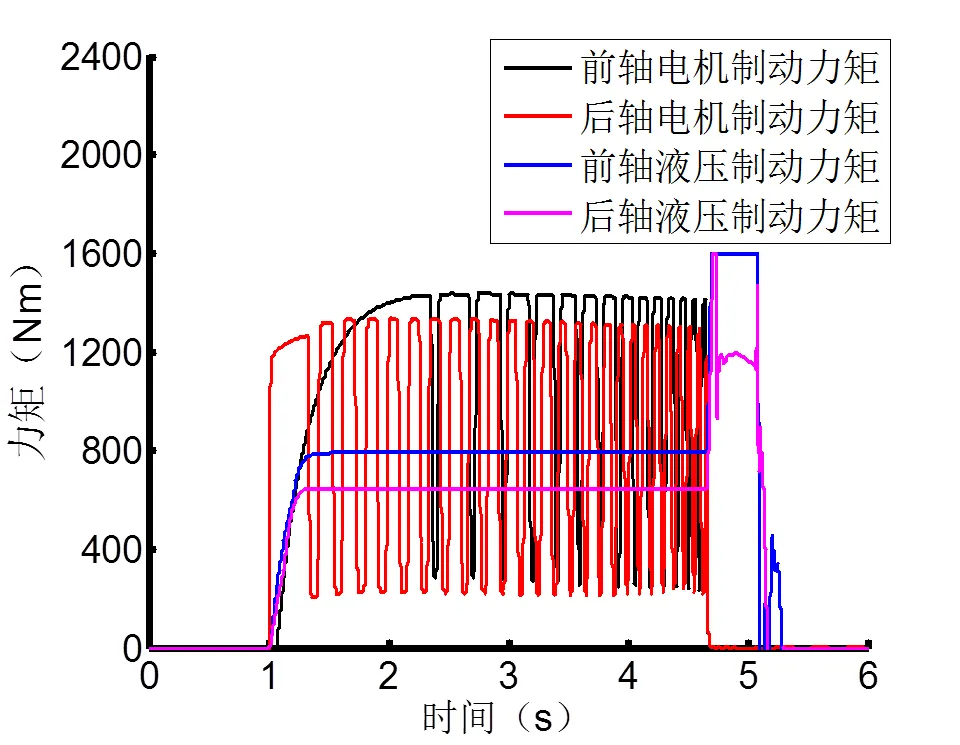
图16 前后轴电机制动转矩和液压制动转矩曲线
4 结论

[1] KIM S H,KWON O J,HYON D,et al. Regenerative braking for fuel cell hybrid system with additional generator[J]. International journal of hydrogen energy,2013,38(20): 8415-8421.
[2] 姚亮,初亮,周飞鲲,等.纯电动轿车制动能量回收节能潜力仿真分析[J].吉林大学学报(工学版),2013(1):6-11.
[3] 罗禹贡,李蓬. 基于最优控制理论的制动能量回收策略研究[J].汽车工程,2006,28(4):356-360.
[4] 刘刚,徐文博,靳立强.轮毂电机驱动电动汽车液压执行单元的压力估计与控制方法研究[J].汽车工程,2019 (10):6-11.
[5] 刘刚,靳立强.基于多模型交互的复杂工况下车辆状态估计[J]. 汽车工程,2018(5):122-129.
Research on Anti-lock Braking Coordinate Control System and Comfort of Electric Vehicle
LIU Gang,YU Hui-yong,HOU Suo-jun
(Department of Automotive Engineering, Henan Institute of Technology, Xinxiang 453003, China)
Aiming at the coordination control and comfort problem of the motor hydraulic composite brake system of the hub driven electric vehicle, a control strategy based on the sliding mode variable structure control algorithm and fuzzy algorithm is proposed. Firstly, the total braking torque required by the electric vehicle is calculated by the sliding mode algorithm according to the vehicle state parameters. Then, according to the stroke of brake pedal and SOC(state of charge) value of battery, the distribution proportion of hydraulic braking and motor braking torque is calculated. The hydraulic braking torque is used as the basic braking, and the wheel slip rate is adjusted by motor torque to realize anti-lock control. Moreover, the brake comfort is improved by reducing the pressure change of hydraulic brake wheel cylinder. Matlab / Simulink, AMESim and CarSim software are used to simulate the high adhesion and low adhesion road respectively. The simulation results show that the anti-lock coordinated control strategy of the composite brake system is effective and improves the comfort of the anti-lock control intervention.
vehicle dynamics; ABS (Anti-lock braking system); sliding mode control algorithm; coordinated braking
U461.2
A
2096–7772(2020)02–0015–06
2019-12-24
河南省科技攻关计划(192102210063);教育部产学合作协同育人项目(201901186011);教育部产学合作协同育人项目(201901203004);河南省高等学校青年骨干教师培养计划项目(2016GGJS-196)
刘刚(1981―),男,河南新乡人,讲师,博士,主要从事汽车底盘电子控制技术研究。
(责任编辑吕春红)
