基于干扰观测器的导引头伺服控制律设计
2020-06-22孙瑞胜卢庆立李文强张晓赛
文 永,孙瑞胜,卢庆立,李文强,张晓赛
基于干扰观测器的导引头伺服控制律设计
文 永1,孙瑞胜1,卢庆立1,李文强2,张晓赛2
(1. 南京理工大学,南京,210094;2. 中国运载火箭技术研究院,北京,100076)
导引头伺服系统是一种高精度伺服系统,工作过程中易受到摩擦力矩、风阻力矩等干扰。为提高伺服系统抗干扰性能,保证系统跟踪精度,提出一种将干扰观测器与反步法相结合的复合控制方法。该方法将干扰力矩未精确建模部分等效为外界集总干扰,采用干扰观测器来观测出系统中的等效干扰并在自适应反步控制律中进行补偿,实现对参考指令的跟踪。仿真结果表明,所提出的方法可以快速实现对参考指令的跟踪,提高了系统的抗干扰能力,可有效抑制导引头伺服系统中的干扰。
干扰观测器;自适应反步法;指令滤波器;导引头伺服;摩擦
0 引 言
导引头作为末制导技术的核心部件,用来完成对目标的自主搜索、识别和跟踪,并给出制导律所需要的视线角信息,其性能优劣决定了导弹的制导效果和打击精度[1]。导引头伺服系统是一种高精度伺服系统,但在工作中容易受到干扰力矩的影响,如摩擦力矩、风阻力矩、电缆柔性力矩、框架间耦合干扰力矩以及质量不平衡力矩等[2]。通过高精度机械加工、配重、精确安装和科学布线等可以明显减少柔性力矩、质量不平衡力矩以及框架耦合干扰对伺服机构的影响。但是由于非线性摩擦环节的存在,使系统的动态及静态性能受到很大程度的影响,主要表现为低速时出现爬行现象,稳态时有较大的静差等[3]。
有关摩擦建模及动态补偿控制技术方面的研究已经有近百年的历史,但由于当时控制理论和摩擦学发展水平的限制,使得这方面研究一直进展不大。20世纪80年代以后,这一领域渐渐活跃起来,文献[4]总结了当前机械系统摩擦模型的研究进展,给出了多种静态与动态摩擦模型。
针对伺服系统中干扰的估计与补偿问题,文献[5]提出一种基于非线性摩擦模型参观观测器的自适应摩擦补偿方法,实现了对摩擦系数的准确估计。文献[6]采用自适应模糊系统在线逼近摩擦模型,将辨识结果作为控制算法的补偿项。文献[7]提出基于扩展卡尔曼滤波器的状态观测器对摩擦力进行估计,可以有效改善运动控制系统性能。
目前在控制领域中,对干扰的处理有很多方法,比如自适应控制、滑模控制、鲁棒控制、基于干扰观测器的控制(Disturbance-observer based control,DOBC)等。其中DOBC方法被认为是一种主动抗干扰控制方法,在工程中应用广泛。该方法可以将系统的模型不确定性和未建模扰动等统一视为系统干扰。文献[8]对于受到干扰影响的非线性系统,建立了基于干扰观测器的控制技术的基本构架。文献[9]利用状态空间干扰观测器,对伺服电机系统的参数及电流测量的不确定性进行估计与补偿。文献[10]采用鲁棒控制的思想,提出一种基于干扰观测器与状态反馈的解耦控制方法,可有效抑制双框架伺服系统干扰。文献[11]设计了基于简化干扰观测器的航空光电平台稳定控制算法,该方法仅由干扰观测器与PI控制器组成。文献[12]提出基于LuGre模型摩擦补偿方案对平台的摩擦力矩进行补偿,并针对残余干扰设计干扰观测器进行估计补偿。
本文以受到外加干扰的导引头伺服系统作为研究对象,建立伺服系统的动力学模型,介绍非线性干扰观测器的设计过程,证明其干扰估计误差的收敛性,设计指令滤波自适应反步控制器,将干扰估计值代入控制律中,完成对干扰的补偿,最后,通过算例进行数值仿真证明了基于干扰观测器控制的有效性。
1 问题描述
1.1 导引头伺服控制系统组成
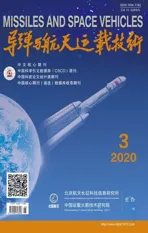
导引头按照稳定平台的种类可以分为两轴和三轴两种类型。由于框架结构质量、体积以及成本的限制,两轴结构应用相对来说更为广泛。双轴结构又可分为俯仰偏航式(偏仰式)导引头、俯仰滚动式(滚仰式)导引头。以滚仰式导引头为例,外框为滚转框,内框为俯仰框,采用速率陀螺稳定平台。主要组成部分有:伺服直流力矩电机、速率陀螺、角度传感器、图像探测器、导引头控制器。其结构如图1所示。
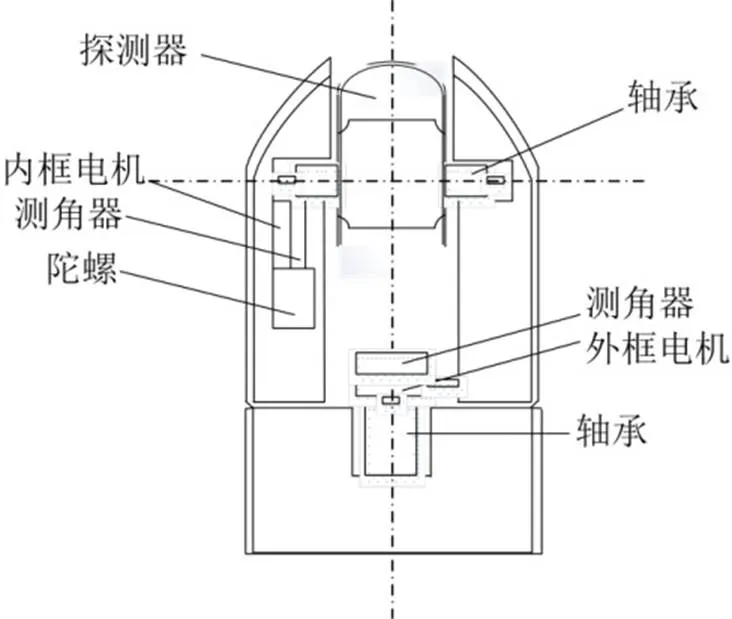
图1 滚仰导引头结构
伺服直流电机用来驱动导引头平台运动,导引头内框框架上安装了探测系统和2个速率陀螺,当导弹弹体运动或者导弹追踪目标时,通过速率陀螺传感器获得的信息作为角速度反馈,同时将角位置传感器获取的角信息作为角位置反馈,实现伺服跟踪控制。
伺服控制系统由:稳定回路、跟踪回路等组成。稳定回路进行速率稳定,保持导引头视线轴稳定在惯性空间内;跟踪回路进行角位置跟踪,在导引头光轴和与目标连线的视轴产生偏差时,保证位置的精确跟踪。滚仰式导引头框架稳定与跟踪原理如图2所示。
图2 滚仰式导引头框架稳定与跟踪原理[13]
1.2 伺服系统动力学模型
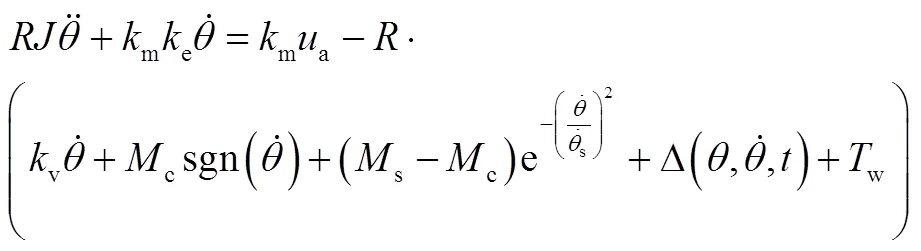
以滚仰式导引头的内框架为例,暂不考虑弹体运动对框架的影响,根据文献[6],其伺服系统动力学方程一般表示为

导引头框架系统在工作中所受到的干扰力矩扰动来源较多,大致上可以分为:摩擦力矩扰动、框架的质量不平衡扰动、风阻力矩扰动及线阻力距扰动等。其中,对于导引头框架平台系统稳定影响尤为严重的是摩擦力矩扰动。载体的振动以及姿态变化,都会通过轴系之间的摩擦力耦合到视线光轴上,进而影响视线光轴的稳定精度。特别是当系统以较低速度运行时,框架平台的跟踪性能会明显降低,容易出现爬行现象。此外,当载体的空速过快时,风阻力矩扰动也会对平台有较大的冲击。本文将外加干扰分为摩擦力矩扰动与风阻力矩扰动两大部分,即:
针对摩擦力矩扰动,相关模型较为复杂,但一般都与框架角速度及框架角有关,综合库伦+粘滞摩擦以及Stribeck摩擦模型,可以将摩擦干扰表示为

对于风阻力矩,由于其波动性很强,一般不能进行精确建模。
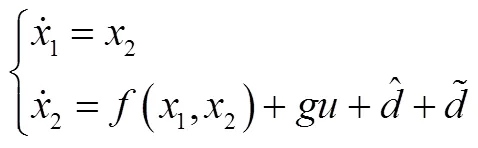
至此,带有干扰的伺服系统动力学方程可以进一步表示为
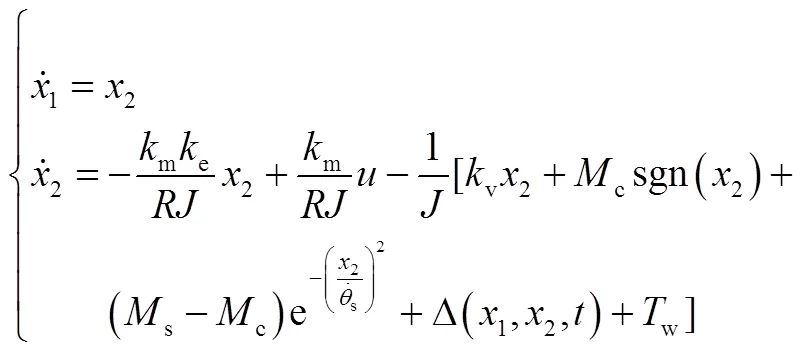
其中,

控制系统式(6)是严格反馈的两级非线性系统。
2 基于干扰观测器的伺服控制
2.1 非线性干扰观测器设计
基于干扰观测器的控制原理如图3所示。
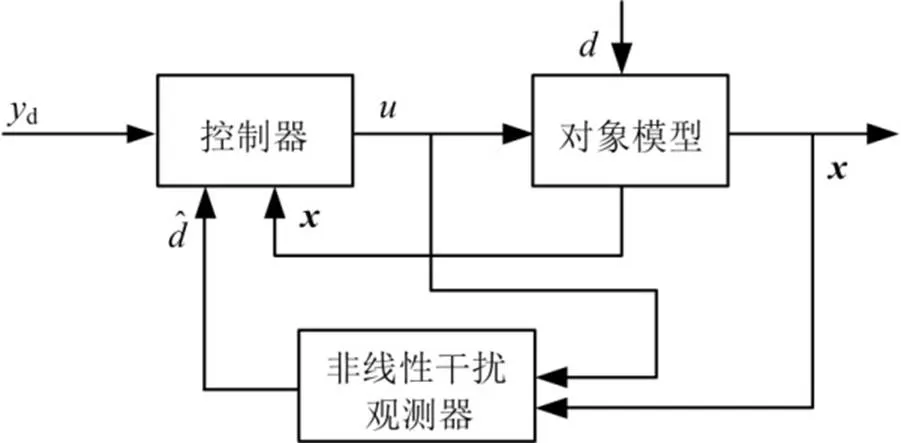
图3 基于干扰观测器的控制原理

2.2 指令滤波自适应反步控制器设计
指令滤波器的本质是一个线性稳定的低通滤波器,其状态空间表达形式为
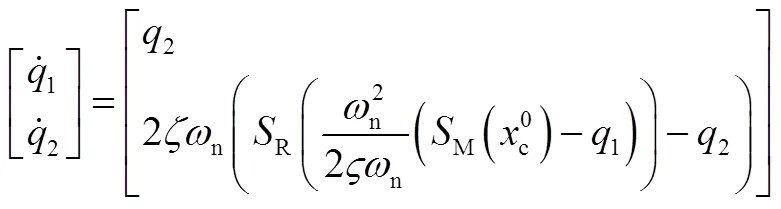
采用指令滤波器计算虚拟控制量导数克服了反步控制方法在系统阶次较高时计算偏导数会产生“微分爆炸”的缺陷,拓展了反步控制方法的适用范围。
加入干扰观测器的伺服系统可以表示为
根据反步控制方法,对一个严格的两级非线性系统设计自适应控制律,具体包括以下2个步骤:
那么,角误差跟踪微分方程:

理想的虚拟控制律为
可以使得:

将式(23)带入式(19),得到:

考虑如下Lyapunov函数:

理想的控制量:

可以使得:

将式(31)带入式(28),得到:
考虑如下Lyapunov函数:

综上所述,对于式(6)这个包含干扰的非线性系统,采用式(10)所示的非线性干扰观测器估计等效干扰,同时为其存在的估计误差设计相应自适应控制律。将干扰观测器的估计结果和为抵消干扰观测器估计误差而设计的自适应控制律一起代入式(23)、式(31)所示的反步控制律中,自适应调节律分别选择式(24)、式(32)的形式,以此来抵消干扰观测器估计误差的影响,保证闭环系统的渐进稳定。
3 数值仿真
为了验证上述干扰观测器及自适应反步控制器的性能,进行数值仿真,并将仿真结果与不加干扰观测器的自适应反步控制仿真结果进行对比分析。
表1给出了仿真涉及到的参数取值。
表1 仿真参数
Tab.1 Simulation Parameters
模型参数/(kg·m2)0.0001220.06190.0618/0.470.020/(N·m)0.00001
续表1
模型参数/(N·m)0.00002/(rad·s-1)1自适应调节器参数1.11.10.10.11.53反步控制器增益510指令滤波器参数0.7200干扰观测器增益60
3.1 阶跃输入响应数值仿真
图4~10给出了输入指令为阶跃信号(30°)的仿真结果对比曲线,分析可知:
a)由图4~7可以看出,基于非线性干扰观测器的自适应反步控制方法能更好地跟踪输入指令,系统响应平稳,跟踪误差小。相应的,不带非线性干扰观测器的自适应反步控制系统的响应有抖振,且跟踪精度达不到工程要求。
b)由图8、图9可以看出,观测值较好地收敛到真实干扰值的周围,误差约为真实干扰值的5%,仿真结果表明,在干扰对时间的变化率有界的情况下,使用文中的非线性干扰观测器可以比较好地估计出干扰。
c)由图10可以看出,两种控制方法控制输入量即电压的变化范围及变化速率均在允许范围内,最大不超过1.0 V,无剧烈振颤,物理上便于直流力矩电机的执行。
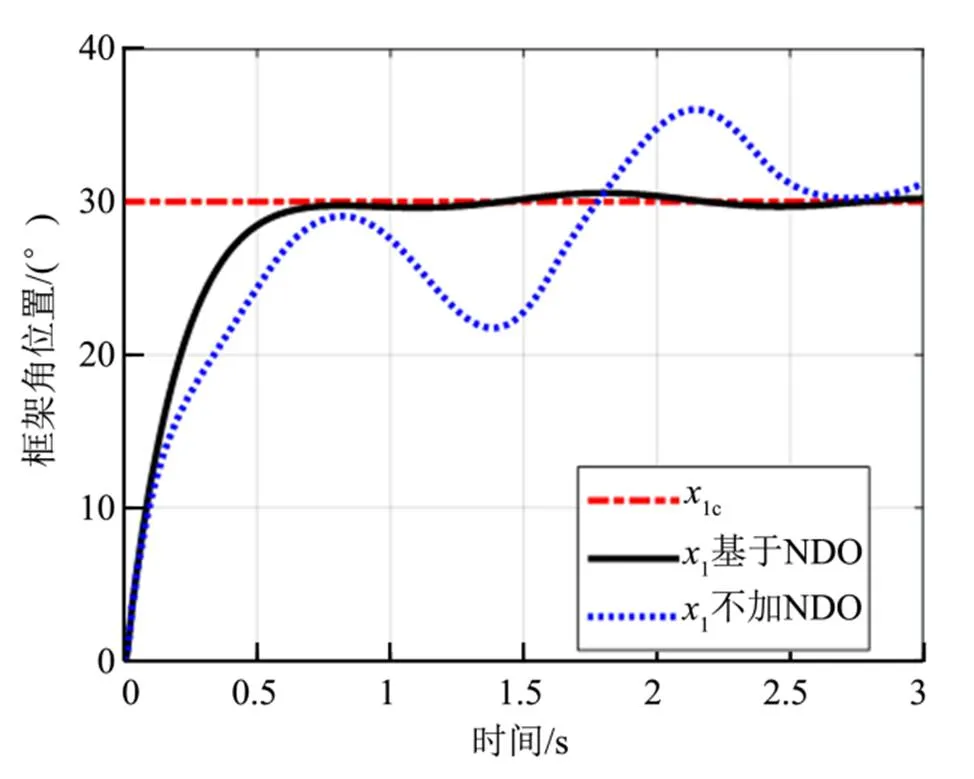
图4 框架角位置跟踪曲线
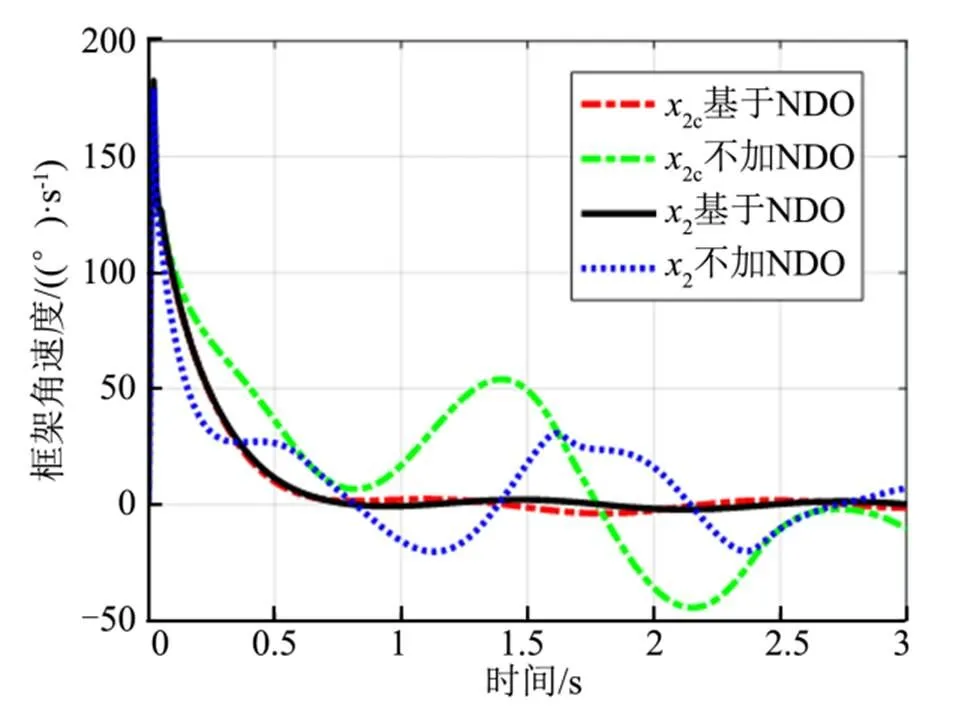
图5 框架角速度跟踪曲线
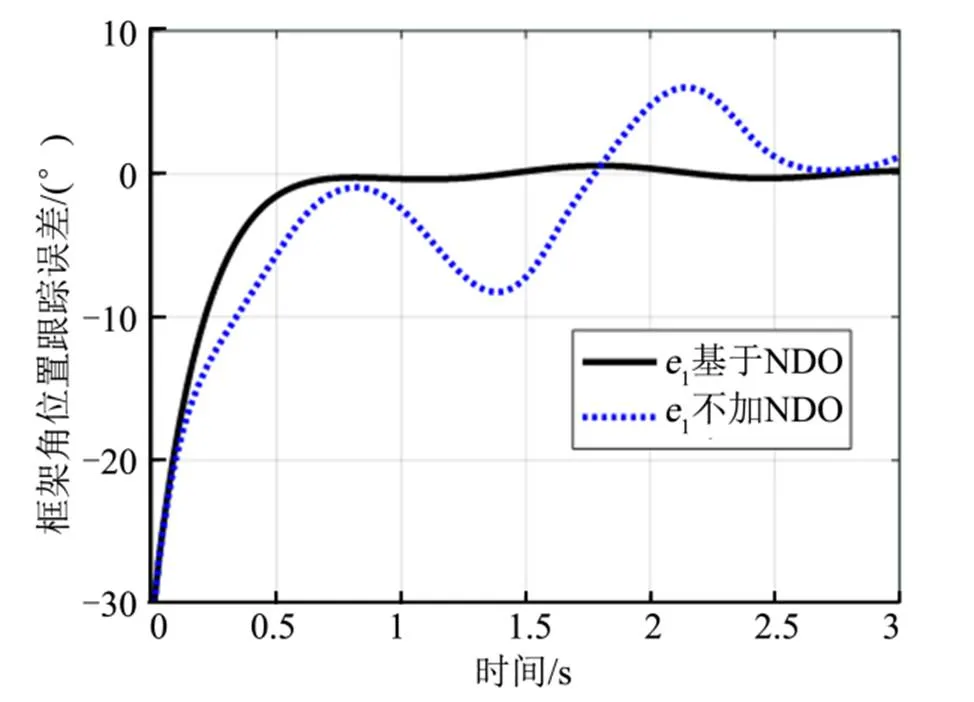
图6 框架角位置跟踪误差曲线
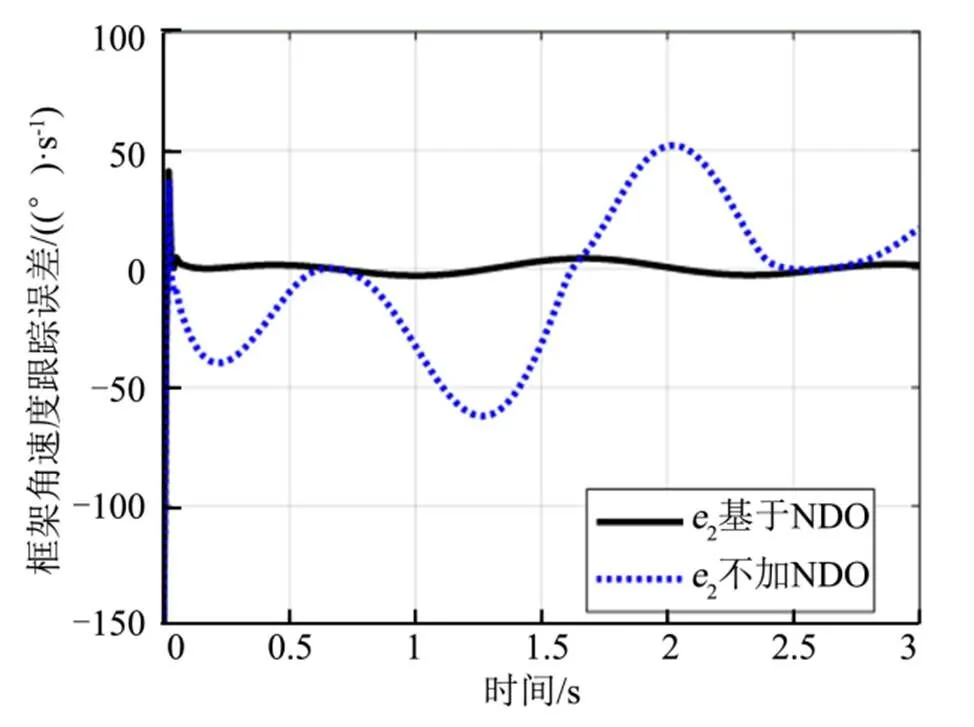
图7 框架角速度跟踪误差曲线
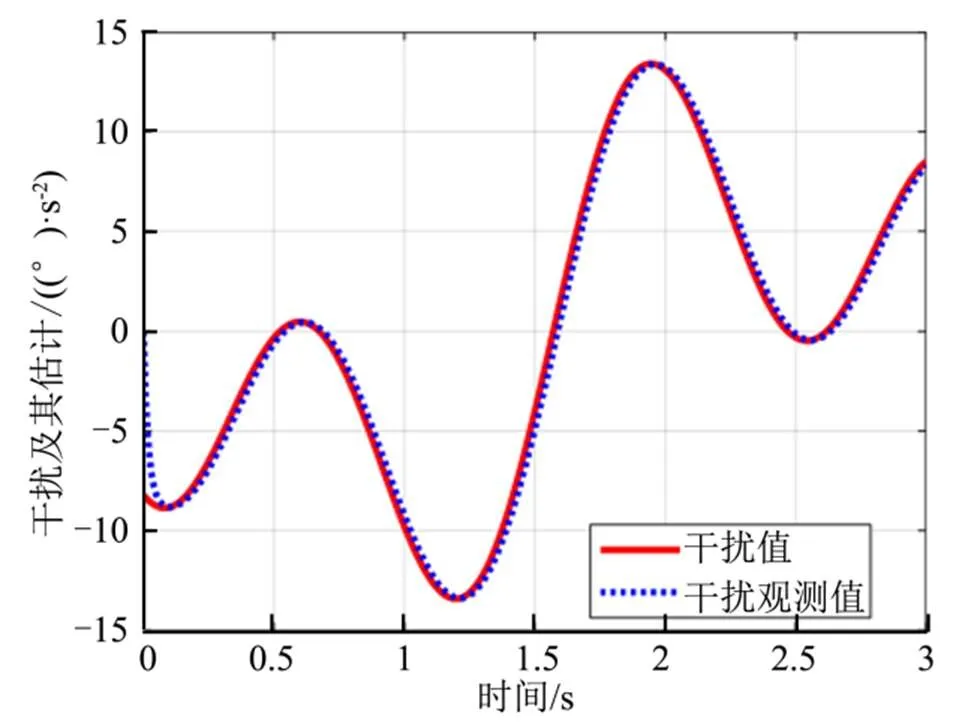
图8 干扰及其估计曲线
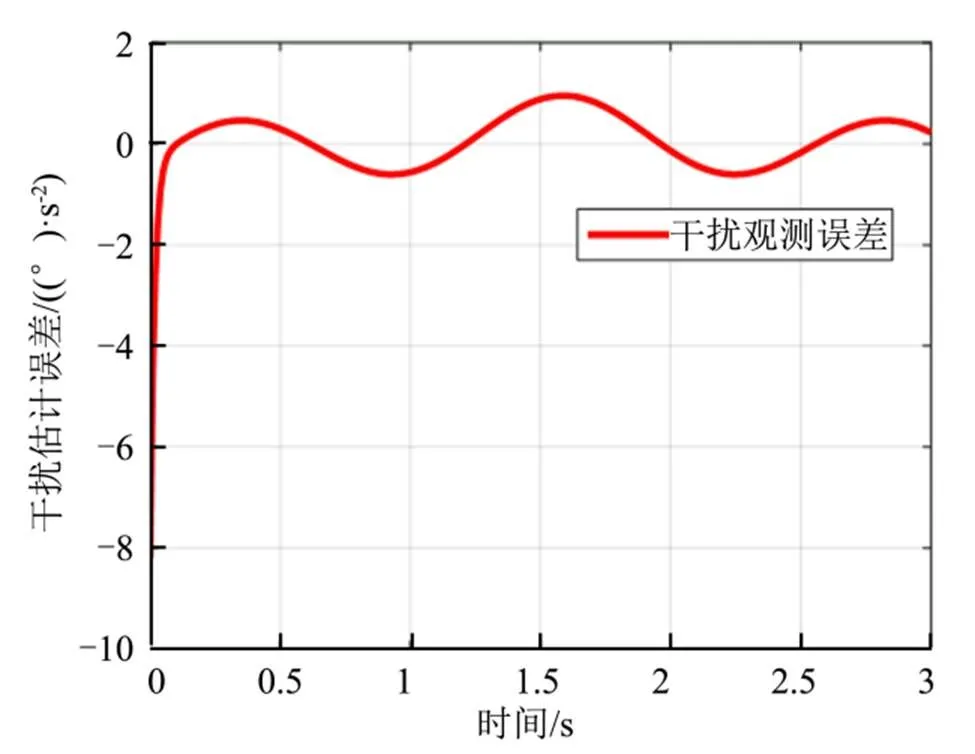
图9 干扰估计值误差曲线
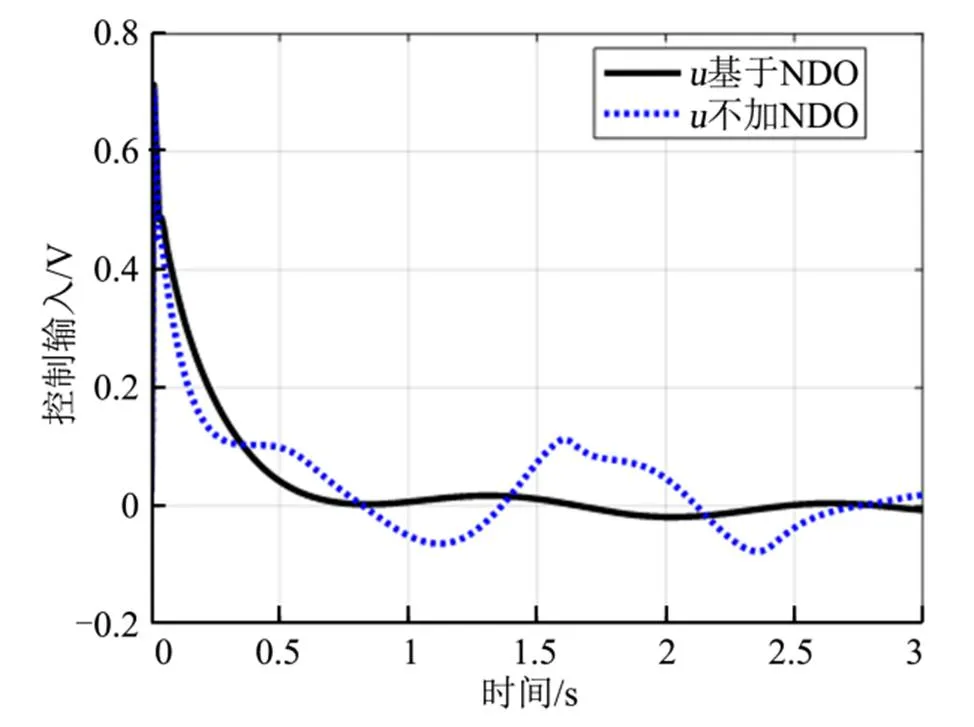
图10 控制输入曲线
3.2 正弦输入响应数值仿真
图11~17给出了输入指令为正弦信号的仿真结果对比曲线。从仿真结果可看出,基于干扰观测器的自适应反步控制方法的控制效果优于无干扰观测器的自适应反步控制,跟踪误差小,抗干扰能力相对更强。
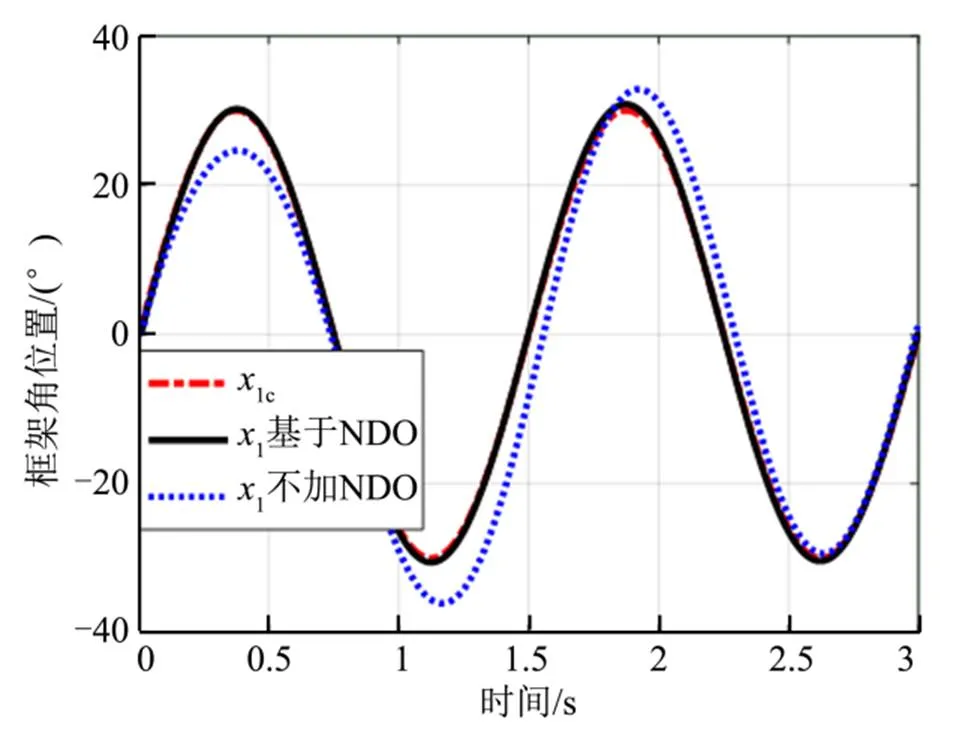
图11 框架角位置跟踪曲线
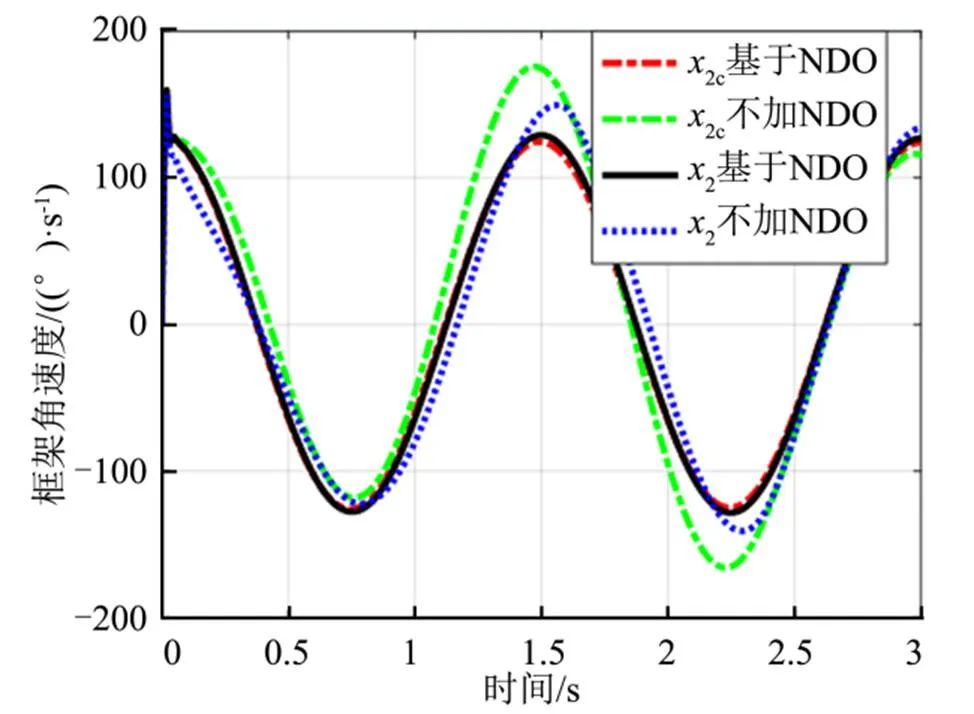
图12 框架角速度跟踪曲线

图13 框架角位置跟踪误差曲线
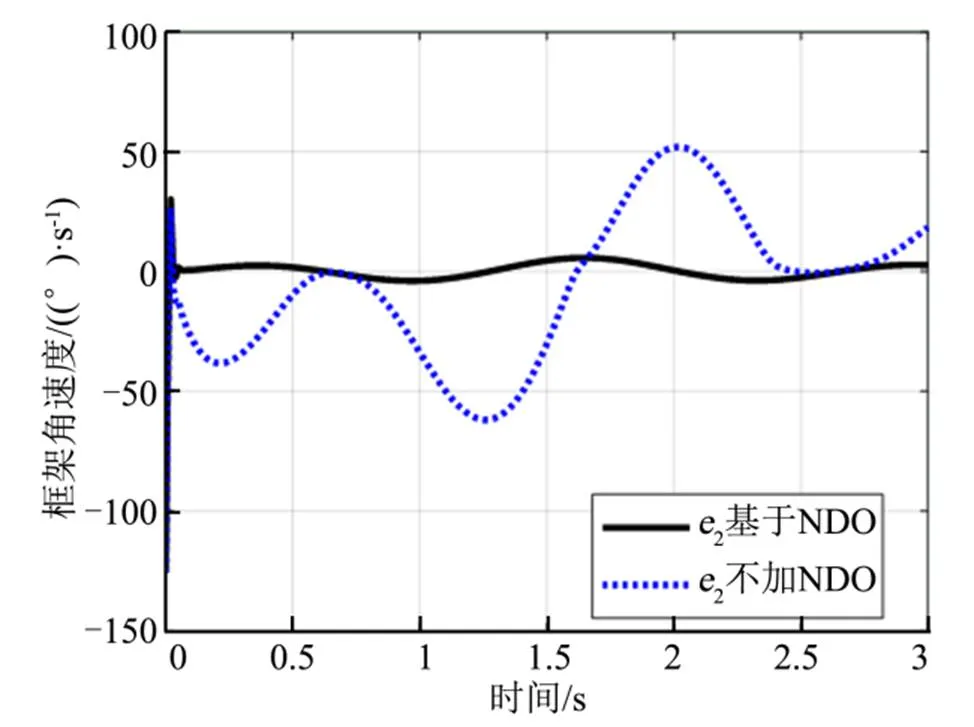
图14 框架角速度跟踪误差曲线
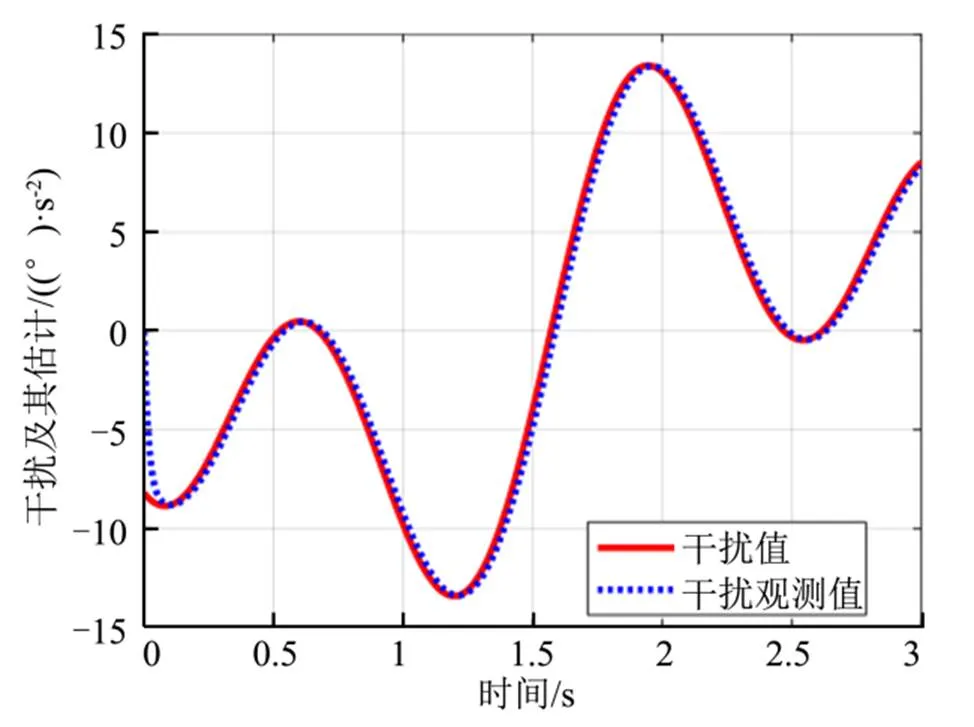
图15 干扰及其估计曲线
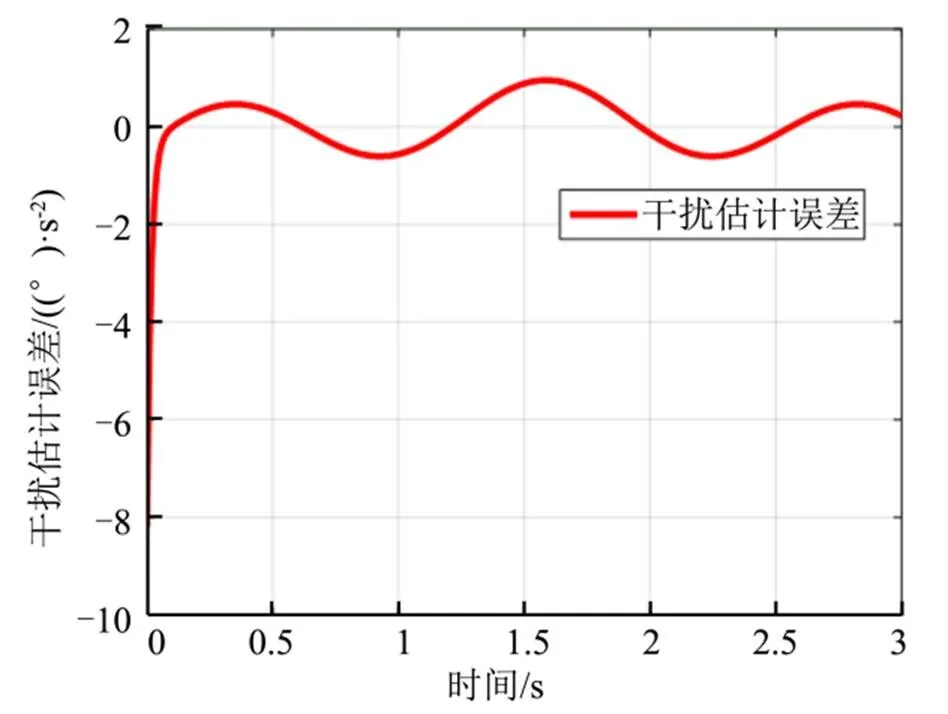
图16 干扰估计值误差曲线
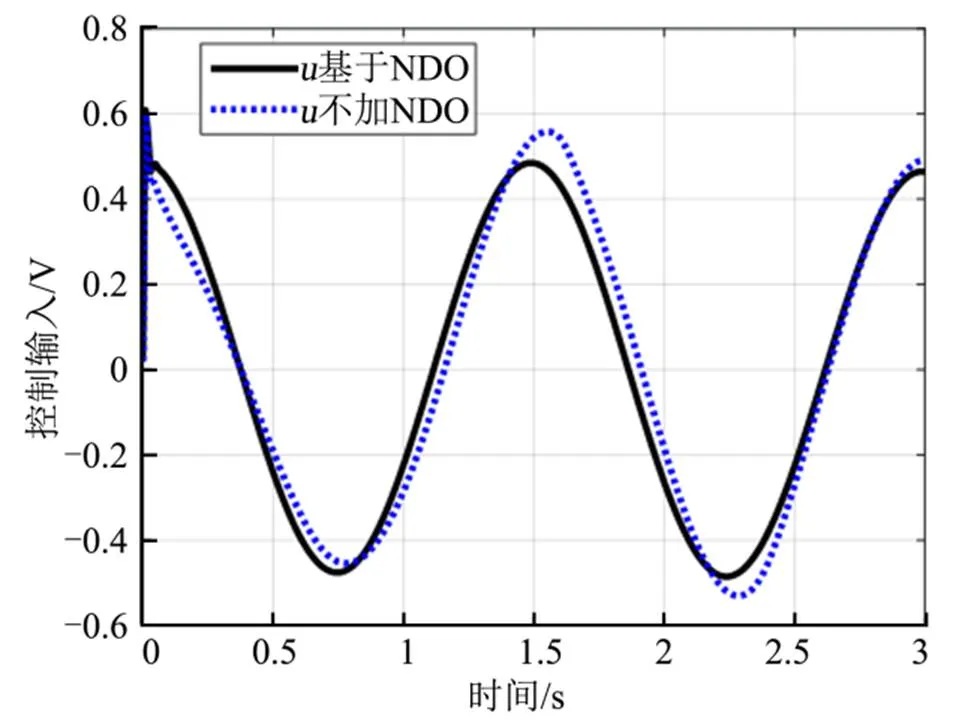
图17 控制输入曲线
4 结 论
本文针对导引头伺服系统中存在的摩擦及其他不确定干扰,提出一种基于干扰观测器的自适应反步控制方法,利用设计的干扰观测器对不确定扰动进行估计并在复合控制器中进行补偿,采用的指令滤波器避免了反步控制方法会产生的微分爆炸问题。此外,文中采用的自适应方法增强了控制系统的鲁棒性。仿真结果表明,该方法可以降低干扰对系统的影响,使导引头伺服系统保证良好的位置信号跟踪性能。
[1] 刘颖, 陈勇. 国外精确制导武器的导引头技术发展[J]. 飞航导弹, 2011(8): 70-73.
Liu Ying, Chen Yong. Seeker technology development of precision guided weapons abroad[J]. Aerodynamic Missile Journal, 2011(8): 70-73.
[2] 张文博. 导引头伺服机构工作特性与先进测控方法研究[D]. 长沙: 国防科学技术大学, 2009.
Zhang Wenbo. A study on working trait and advanced measurement & control method of seeker servo mechanism[D]. Changsha: National University of Defense Teehnology, 2009.
[3] 李岩. 光电稳定跟踪装置误差建模与评价问题研究[D]. 长沙: 国防科学技术大学, 2008.
Li Yan. A study on error modeling & evaluation of electro-optical stabilization/tracking equipment[D]. Changsha: National University of Defense Teehnology, 2008.
[4] 刘丽兰, 刘宏昭, 吴子英, 王忠民. 机械系统中摩擦模型的研究进展[J].力学进展, 2008(2): 201-213.
Liu Lilan, Liu Hongzhao, Wu Ziying, Wang Zhongmin. An overview of friction models in mechanical systems[J]. Advances in Mechanics, 2008(2): 201-213.
[5] 曾鸣, 王忠山, 王学智. 基于非线性摩擦模型参数观测器的自适应摩擦补偿方法的研究[J]. 航空精密制造技术, 2005, 41(3): 17-22.
Zeng Ming, Wang Zhongshan, Wang Xuezhi. Research on adaptive friction compensation based on the observer of nonlinear friction model coefficient[J]. Aviation Precision Manufacturing Technology, 2005, 41(3): 17-22.
[6] 王永富, 柴天佑. 一种补偿动态摩擦的自适应模糊控制方法[J]. 中国电机工程学报, 2005, 25(2): 142-146.
Wang Yongfu, Chai Tianyou. Adaptive fuzzy control method for dynamic friction compensation[J]. Proceedings of the CSEE, 2005, 25(2): 142-146.
[7] 吕娴娜, 刘银年. 基于摩擦观测器的伺服控制系统研究及仿真[J]. 测控技术, 2012, 31(11) : 60-62, 66.
Lv Xianna, Liu Yinnian. Research and simulation of servo control system based on friction observer[J]. Measurement & Control Technology, 2012, 31(11) : 60-62, 66.
[8] Chen W H . Disturbance observer based control for nonlinear systems[J]. IEEE/ASME Transactions on Mechatronics, 2005, 9(4): 706-710.
[9] Huang W S, et al. Precision control and compensation of servomotors and machine tools via the disturbance observer[J]. IEEE Transactions on Industrial Electronics, 2010, 57(1): 420-429.
[10] 宁欣, 韩邦成, 房建成. 基于干扰观测器的双框架变速率控制力矩陀螺解耦控制[J]. 机械工程学报, 2017, 53(10): 52-59.
Ning Xin, Han Bangcheng, Fang Jiancheng. Disturbance observer based decoupling method of double-gimbaled variable speed control moment gyroscope[J]. Journal of Mechanical Engineering, 2017, 53(10): 52-59.
[11] 王福超, 田大鹏, 王昱棠. 基于简化干扰观测器的光电平台稳定与评估[J]. 国外电子测量技术, 2015(12): 13-17.
Wang Fuchao, Tian Dapeng, Wang Yutang. Inertial stability and evaluation of photoelectric platform based on a simplified DOB[J]. Foreign Electronic Measurement Technology, 2015(12): 13-17.
[12] 晋超琼. 基于摩擦力补偿的干扰观测器在航空光电稳定平台的应 用[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2017.
Jin Chaoqiong. Application of disturbance observer based on friction compensation in aerial photoelectric stabilized platform[D] Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2017.
[13] Dongsheng L, Huaqiang Z, Zhao Y. Research on modeling and simulation for pitch/roll two-axis strapdown stabilization platform[C]. Chengdu: IEEE 2011 10th International Conference on Electronic Measurement & Instruments, 2011.
[14] Farrell J A, Polycarpou M, Sharma M, et al. Command filtered backstepping[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1391-1395.
Disturbance Observer Based Servo Control Law Design for Seeker
Wen Yong1, Sun Rui-sheng1, Lu Qing-li1, Li Wen-qiang2, Zhang Xiao-sai2
(1. Nanjing University of Science & Technology, Nanjing, 210094; 2. China Academy of Launch Vehicle Technology, Beijing, 100076)
The servo system of the seeker is a high-precision servo system that is susceptible to frictional torque, wind resistance torque and other disturbances during operation. In order to improve the anti-disturbance performance of the servo system and ensure the tracking accuracy of the system, a composite control method combining the disturbance observer and the backstepping control method is proposed. In this method, the part of the disturbance torque that is not accurately modeled is equivalent to the external lumped disturbance. The disturbance observer is used to observe the equivalent disturbance in the system and compensate in the adaptive backstepping control law to realize the tracking of the reference command. The simulation results show that the proposed method can quickly track the reference command, improve the anti-disturbance ability of the system, and can effectively suppress the disturbance in the servo system of the seeker.
disturbance observer; adaptive backstepping control; command filter; servo system of the seeker; friction
1004-7182(2020)03-0068-08
10.7654/j.issn.1004-7182.20200313
TJ765.3
A
文 永(1996-),男,硕士研究生,主要研究方向为导引头伺服控制、制导控制系统设计。
孙瑞胜(1978-),男,博士,教授、博士研究生导师,主要研究方向为先进飞行器多学科综合优化设计、非线性飞行动力学建模与仿真、鲁棒控制与制导技术、参数估计与系统辨识研究。
卢庆立(1994-),男,博士研究生,主要研究方向为自适应控制、自抗扰控制等先进控制理论。
李文强(1977-),男,高级工程师,主要研究方向为导弹总体设计。
张晓赛(1982-),女,工程师,主要研究方向为项目管理。
2020-05-01;
2020-05-12