采用分布式控制单元的线控4WS系统研究
2020-06-20张庭芳郭劲林张超敏
张庭芳,郭劲林,曹 铭,张超敏
(南昌大学机电工程学院车辆工程研究所,江西 南昌 330031)
1 引言
近年来,随着电子科技的不断发展,四轮转向(4WS)和线控转向(SBW)技术已经成为汽车转向系统的研究热点[1]。4WS技术是改善汽车操纵稳定性最有效的主动底盘技术,而SBW则是四轮主动转向的发展趋势,它去除了转向盘与转向轮之间的机械连接部分,完全由信号线和控制器代替,通过合理的控制方法来分配前、后轮转角,从而实现智能控制。
国内目前在线控转向特别是线控四轮转向系统的开发和试验台搭建方面尚处在起步阶段,但在相关控制理论方面有一定的成果[2-3]。虽然我国线控转向技术的研究水平还无法与国外相比,但对该系统继续进行深入细致的研究,对于拓展线控传动技术的应用、加快国产汽车的电子化发展,以及提供未来智能汽车驾驶技术的支持,都将有深远的意义。结合4WS和SBW的优点,进行线控4WS系统的整体结构设计,并对该系统分布式控制单元进行软硬件设计及实现。
2 系统硬件结构设计
线控4WS系统整体结构设计,如图1所示。主要由方向盘模块、前轮转向执行模块、后轮转向执行模块、控制单元(ECU)等构成。考虑到线控系统的性能对其控制单元有很高的要求,设计出一种分布式控制单元,包括1个主控制器、1个路感电机控制器、2个转向执行电机控制器和2个道路阻力加载电机控制器共计6个节点。主控制器负责采集转角、车速、横摆角速度等数据,运行车辆转向的主动控制算法计算出理论车轮转角;路感电机控制器负责计算此时的路感力矩,输出PWM波控制路感电机输出驾驶者路感,并在需要时控制方向盘回正;转向执行电机控制器负责接收车轮转角数据,输出PWM波控制转向执行电机实现车轮转向。
在搭建系统试验台时,参考文献[4]在搭建类似试验台时的做法,阻力加载采用具有高精度、高线性度优点的电机模拟转向执行模块工作时承受的道路阻力,与传统加载方式如电动缸加载相比,电机摩擦小、传动效率高、能快速响应转向系统加载需求并可精确运动至某一位置[4]。所有控制器均选择飞思卡尔公司的微控制器MC9S12XF512,其能够满足线控转向过程中的数据处理和算法控制要求。各控制器通过CAN总线串联,可实现消息实时通信,由于MC9S12XF512自带了CAN通信模块MSCAN,故只需在控制器外部连接CAN总线收发器即可,选用恩智浦公司TJA1050收发器。

图1 汽车线控4WS系统Fig.1 Automobile 4WS-by-Wire System
3 系统最优控制策略研究
3.1 4WS汽车横向动力学模型
质心侧偏角和横摆角速度是影响汽车转向稳定性的两个至关重要的因素,把汽车简化为一个包含这两个自由度的二自由度两轮模型进行研究[5]。假设轮胎侧偏特性处于线性范围,保持汽车前进速度不变,忽略悬架的影响,认为汽车只作平行于地面的平面运动,则汽车只有沿y轴的侧向运动与绕z轴的横摆运动2个自由度[6]。其运动方程如下:

式中:β—质心侧偏角;kf和 kr—前、后轮侧偏刚度;δf和 δr—前、后转角;a和b—质心到前、后轴的距离;IZ—汽车绕质心的转动惯量。
为了可以调节前、后轮最优控制反馈角的比例,令前后轮转角满足式(2):

把式(2)代入式(1),并化为状态方程:

3.2 4WS最优控制器设计
构造最优控制器的目的是寻求最优的控制器反馈输入角δi,使质心侧偏角为零和横摆角速度响应快速而稳定,并控制所需的能量较小,所以应使(4)式二次型性能指标为极小值。

构造哈密顿函数H为:


因为只要汽车参数确定,R和B都为常数,所以只要γ(t),就可求出U*。

对(7)两边求导可得:

又因为伴随方程为:

令式(8)与式(9)相等,并把式(3)、式(6)和式(8)代入,考虑到 A、B、Q、R 都为常数阵,当 t→∞ 时,P˙(t)=0,ε˙(t)=0,得:

最后得到:

所以最优控制器前轮转角前馈增益矩阵K1=-R-1BT(PBR-1BT-AT)-1PD,而状态变量反馈增益矩阵K2=-R-1BTP。四轮转向最优控制器系统结构,如图2所示。
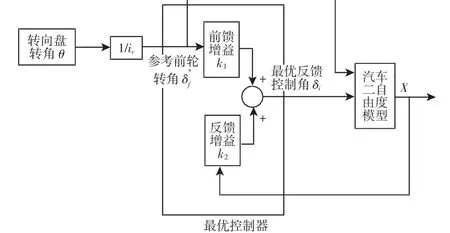
图2 4WS最优控制器结构Fig.2 4WS Optimal Controller Structure
4 系统控制单元软件设计
线控4WS系统总体控制流程,如图3所示。软件设计将介绍方向盘转角采集、控制策略实现、前后轮电机控制以及CAN通信功能。

图3 线控4WS系统控制流程图Fig.3 Control Flow Chart of 4WS-by-Wire System
4.1 方向盘位置采集模块
方向盘位置采集模块位于主控制器中,其工作内容有三个:(1)判断方向盘转动方向;(2)采集方向盘转角大小;(3)方向盘的极限区域判断。采用增量式光电编码器为转角传感器,用增强型捕捉定时器的PACN10通道采集信号,其工作原理及流程,如图4所示。
4.2 最优控制模块
最优控制模块的具体思路是[7-8]:理论前轮转角先由方向盘转角、车速、横摆角速度作为输入量,通过模糊控制方法得到转向系传动比,如图5所示。以此得到前轮的输入转角,然后将和前后轮转角的关系式代入4WS二自由度整车动 学模型中,通过最优控制(如图2所示)寻求最优的控制器反馈输入角δi,相加得到前后轮最终的理论转角a
由式(2)和式(11)联立求解最优控制的理论前后轮转角的最终表达式为:

其中,X=[β ωr]T,因为质心侧偏角 β 很小,所以认定 β=0,而横摆角速度ωr忽略其上升过程,认定其等于稳态横摆角度,表达式:


图4 方向盘位置变化采集模块控制流程图Fig.4 Flow Chart of Steering Wheel Position Change Acquisition Module
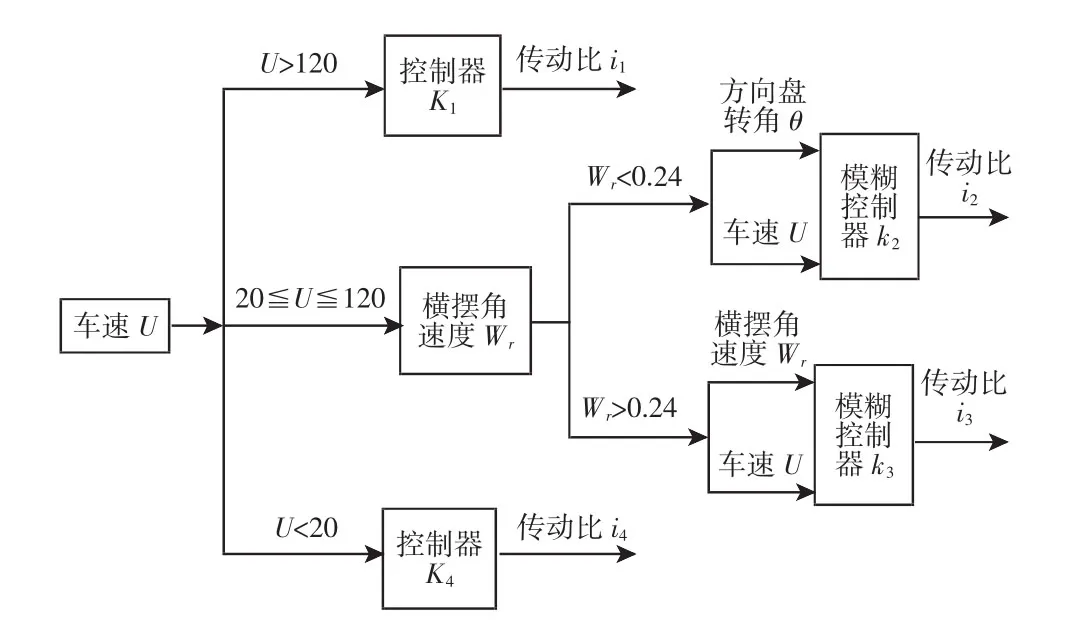
图5 模糊变传动比控制思路Fig.5 Control Ideas of Fuzzy Variable Ratio
4.3 转向执行电机控制模块
转向执行电机控制模块计算理论前后轮转角需要的电机电压大小,输出合适的PWM波,同时根据线位移传感器采集到的实际车轮转角act_δf和act_δ,通过PID算法修正PWM波形,实现电机闭环控制。使用拉杆式直线位移传感器(类似于一个滑动变阻器),通过一个8位A/D口来采集其变化情况,其输出变化范围为(0~5)V,等效于A/D采集数值的(0~255),采集结果保存在 AD_in0中。PID控制输入量为理论前后轮转角与实际前后轮转角的偏差值e(t),而控制输出量为体现占空比的电压值Volt,该值由PWM控制输出,其占空比为Duty用于直接驱动前后轮执行电机,也就调节了实际前后轮转角,实现了闭环控制[9]。
4.4 CAN通信模块
CAN通信模块是SBW系统控制单元实现分布式控制的关键,各控制器需通过CAN通信模块来收发需要的数据,对CAN通信模块收发的报文信息设计,如表1所示。MC9S12XF512单片机可通过其自带的MSCAN模块来控制CAN通信,故CAN通信模块通过设置MSCAN的相关寄存器来设定通信参数,考虑到转向系统对指令的实时性有很高的要求,在MSCAN初始化时设置CAN通信速率为500kb/s,通信时钟均使用ECU内部总线时钟源,并使能总线接收中断[10]。

表1 CAN总线报文信息Tab.1 CAN Bus Message Information
5 系统台架搭建和实验验证
在线控4WS系统硬件和软件设计完成后,搭建系统台架可方便进行相关性能验证实验。由于4WS系统前后轮转向执行模块和阻力加载模块均完全一致,故在搭建台架时为了简化,实际只搭建了前轮转向执行模块和阻力加载模块。搭建完成的系统台架各部分,如图6所示。实验中车速、横摆角速度等车体状态信号由信号发生器提供。

图6 线控4WS系统实验台架Fig.6 Bench of 4WS-by-Wire System
为验证所设计的线控4WS系统在软硬件设计上的正确性,采用仿真模拟结果和实验结果对比的方式来说明。在Matlab/Simulink中建立了线控4WS汽车最优控制仿真模型,如图7所示。并进行了三种不同工况下的仿真模拟,仿真模拟结果和相同条件下的实验结果对比,如图8所示。

图7 线控4WS系统最优控制Simulink模型Fig.7 Simulink Model of 4WS-by-wire System Optimal Control

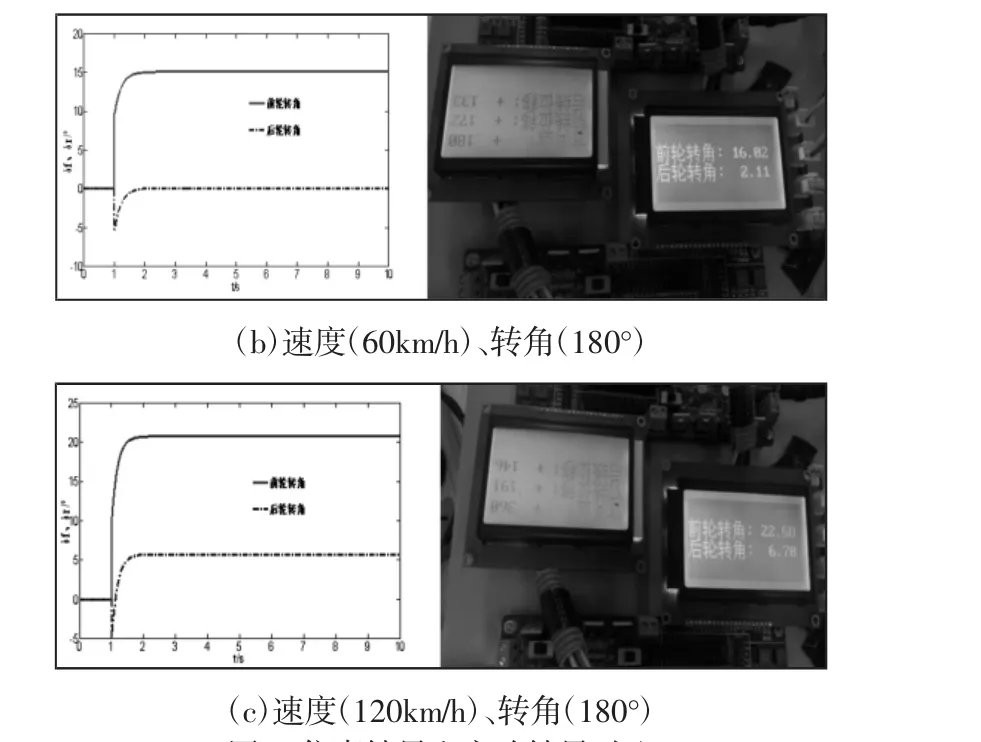
图8 仿真结果和实验结果对比Fig.8 Contrast of Simulation Results and Experimental Results
通过图8的结果可知,Simulink模型中不同工况下前后轮转角仿真结果和实验结果是非常接近的,所以该线控4WS系统软硬件设计是合理可行的。
6 小结
全文设计并实现了一种线控4WS转向系统,主要研究成果如下:(1)对线控4WS系统整体结构进行了设计,并提出在系统中加入阻力加载模块来模拟道路工况;(2)对控制单元进行了软硬件设计,提出采用分布式控制单元ECU来减少单一控制器工作负荷,并对ECU工作时的几个重要功能模块以及用于数据交换时的CAN通信模块进行了详细软件设计;(3)通过相同条件下的仿真模拟结果和实验结果对比,完成了系统基本功能的验证,说明线控4WS系统的软硬件设计是正确可行的。
