直升机机载扫描反射镜组件随机振动仿真分析
2020-06-20郑锋华李金鹏
衡 楠 ,郑锋华 ,李金鹏
(1.中国科学技术大学,安徽 合肥 230022;2.中国科学院南京天文仪器研制中心,江苏 南京 210042;3.中国科学院南京天文仪器有限公司,江苏 南京 210042)
1 引言
直升机由于其特有的垂直起飞、转向及悬停等低高空飞行特性,使其具备良好的灵活机动性能,能够应对包括军事打击、险情救援、社会救助等各类情况的特殊需求。扫描反射镜组件作为重要的机载光学仪器设备,主要实现光路折返、目标指向、补偿像移以及扩大覆盖范围等功能[1],其性能的稳定性与可靠性将直接影响机载光学系统的功能。在直升机起降及飞行过程中,机载设备会受到来自主旋翼、尾桨和传动机构等综合产生的随机振动激励[2]。环境的振动激励会从机体传递到扫描反射镜组件,其后逐级传递到各结构件,最终影响反射镜的精度与性能。按照相关测试规定,直升机机载设备需要进行随机振动试验,以保证反射镜使用效果。许多学者对直升机的振动环境特性及其对机载设备的影响做了相关的分析和研究。文献[3]研究了在直升机特有的振动环境下不同类型载荷对机载设备时的疲劳损伤影响;文献[4]系统总结了直升机振动谱线在仿真分析中的不同转化方法,并以某PCB板组件为例做了对比分析,得到了不同方法的严酷程度;文献[5-6]分别介绍了在有限元软件平台上采用传统的振动谱线等效转化方法实现对直升机机载急救单元和电源箱的随机振动分析。现有的文献资料中所采用的传统谱线转化方法大多依赖对结构品质因数的估计,其准确性直接影响分析结果可靠性,且缺乏在直升机振动环境下对扫描反射镜组件的相关动力学分析。
针对外挂于直升机机体上的扫描反射镜装置进行动力学特性研究,根据设计要求,扫描反射镜组件在随机振动条件下的轴向位移需小于0.01mm,反射镜镜面面形精度RMS<λ/50(λ=632.8nm),并有足够的动态承载能力。以一种基于振动实验的谱线转化方法得到边界条件,继而分析三个正交轴向激励下组件的随机振动响应,考察了总体结构的动态承载能力,为直升机机载光电设备方案设计与分析提供参考。
2 扫描反射镜组件随机振动分析方法
随机振动是一种最常见的非确定性振动形式,其波形具有不确定性,幅值和相位变化不可预知,只能通过统计分析方法得到过程的整体统计特征,如均值、方差、功率谱等[7]。随机振动分析是采用功率谱密度作为输入激励以确定响应出现特征值的概率大小的频域分析方法。在工程计算中,材料的物理性质常被认为是各向同性的,物理过程通常被假定为线性、平稳,各态历经以及满足高斯分布类型[8]。
2.1 扫描反射镜组件结构组成
扫描反射镜组件主要由长条形SiC反射镜、接钢套、柔性铰链以及支撑背板组成。为减轻组件重量,同时兼顾使用要求,反射镜采用背部开放式结构,其加强筋采用三角形筋板形式。连接钢套和柔性环节的材料均采用与反射镜热膨胀系数相近的殷钢,以便减少由于材料热特性不匹配导致的镜面变形。支撑背板选择强度高、刚性好的钛合金。扫描反射镜组件材料的相关物理性质,如表1所示。

表1 扫描反射镜组件的材料属性Tab.1 Material Properties of the Scanning Mirror Assembly
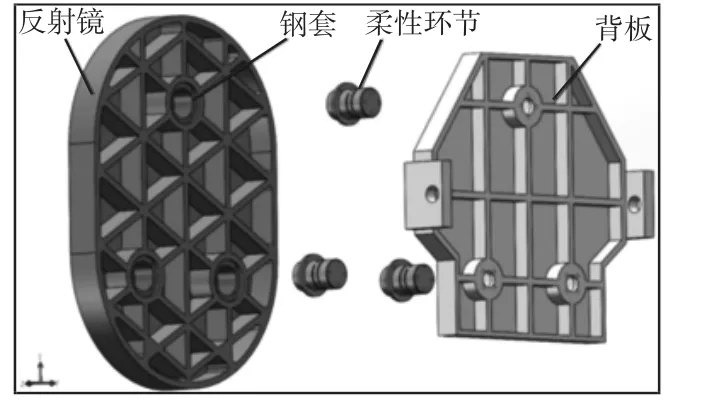
图1 扫描反射镜组件的结构Fig.1 Structure of the Scanning Mirror Assembly
装配时,首先将连接钢套放入反射镜支撑部位,用无膨胀结构胶将其与镜背粘接,然后通过螺钉连接钢套和柔性环节,柔性环节经过特殊设计,一端伸出与钢套配内孔合,起到定心作用,最后通过螺钉将柔性铰链与支撑背板连接在一起。组件的结构,如图1所示。
2.2 扫描反射镜组件的随机振动响应分析方法
分析过程中,首先将正弦定频加速度峰值转换为窄带随机振动谱,叠加宽带随机振动谱后得到所需的输入加速度功率谱密度S(ω),然后根据需要求解出结构的前若干阶固有频率及其主振型,最后通过对结构模型的动力学方程进行等价转换、化简解出结构的随机振动位移响应。正弦定频幅值A(fn)和窄带功率谱密度Gq(fn)之间的转化关系如下[5]:

式中:汉宁窗系数k=1.5,振动控制器的频谱分辨率Δf=0.625Hz。转换后的窄带谱Gq(fn)作为输入谱S(ω)的一部分参与计算。针对离散化的结构模型,其动力学方程[9]:

式中:[M]—质量矩阵;[C]—阻尼矩阵;[K]—刚度矩阵;{y}—位移向量;{E}—方向向量—外界激励加速度。令新的广义模态坐标为u,利用振型矩阵[φ]进行线性变换有:

在比例阻尼的假设下,根据模态振型关于质量矩阵和刚度矩阵的正交性并将模态矩阵正则化,可将式(2)化为m个相互独立的单自由度方程:

式中:γj—第j阶振型的参与系数。
式(4)在时域内的解为:

式中:hj(τ)—与第j阶振型相对应的脉冲响应函数。
进而由式(3)得到:
通过维纳-辛钦关系并对[Ryy(τ)]进行傅里叶变换,便可得到输出的位移功率谱密度与输入的加速度功率谱密度的关系:

3 随机振动仿真分析
3.1 振动输入边界条件的确定
直升机运输货物的振动特性是在低量级连续宽带随机振动背景上叠加强烈的窄带峰。装备安装位置为外挂时的混合振动激励谱图,如图2所示。其中,fn(n=1,2,3,4,5,6)代表主旋翼转频及其倍频,这里fn的数值由某研究单位提供,其具体数值及对应的正弦振动加速度峰值,如表2所示。

图2 混合振动激励谱Fig.2 Mixed Excitation Spectrum
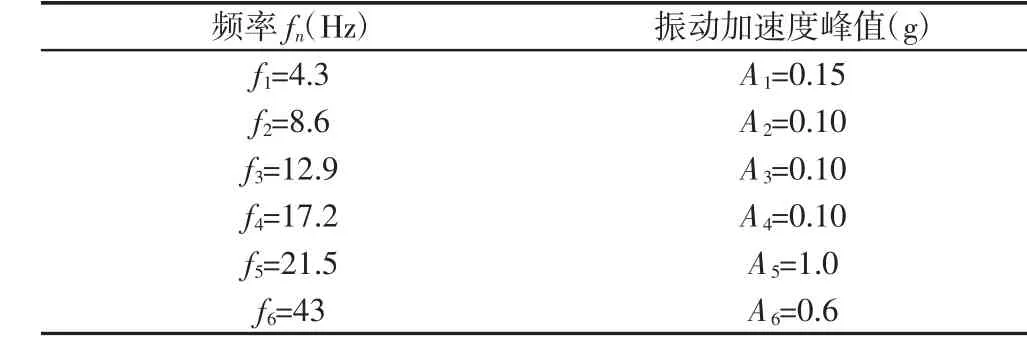
表2 正弦振动定频及其相应加速度峰值Tab.2 Sine Vibration Frequency and Correspondent Acceleration
由于这种混合振动模式的复杂性,激励谱无法直接作为边界条件施加到有限元模型上,所以进行仿真时,先将宽带随机背景叠加正弦峰值混合振动谱线(Sine-On-Random,SOR)转化为宽带叠加窄带谱线(Random-On-Random,ROR)。目前最常用的谱线转化方法[6],如式(9)、式(10)所示。
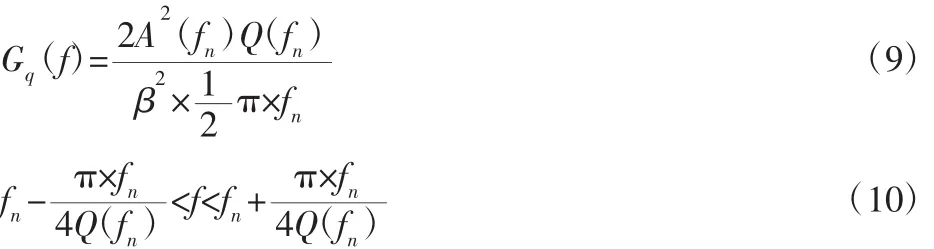
式中:Gq(f)—等效的随机振动自功率谱密度;A(fn)—正弦分量;Q(fn)—品质因数;β—等效因子,一般取1.8;fn—进行等效转换的振动频率。
应用上述公式时,对给定的SOR谱线,需先得知结构品质因数Q(fn),而其准确值需通过实验测定,对于研发初期阶段一般按设备结构关系和材料性质取经验值,其值准确与否对转化后谱线的幅值和带宽影响很大[4]。同时由于扫描反射镜系统最终需要通过真实的振动试验来鉴定是否满足抗振要求,故采用基于试验的谱线转化方法更为有效。SOR谱线中正弦定频信号理论上具有零带宽,而在振动控制器中正弦实际宽度总是与数据分析的频率分辨率带宽相同,且幅值随着分析带宽的变窄而增大。设定振动控制器的分析带宽后,在功率谱密度(PSD)图上,正弦信号变为带宽等于分析带宽的窄带信号。根据式(1),转换后的谱线,如图3所示。

图3 转换后的宽带叠加窄带随机振动谱Fig.3 Transformed ROR Vibration Spectrum
3.2 扫描反射镜系统有限元模型
分析时对模型进行合理简化,忽略反射镜、背的倒角、圆角以及连接孔处的螺纹,但对隔振起到关键作用的柔性环节进行详细建模。用10节点四面体单元Tet10对模型进行自适应网格划分,生成307016个节点和196901个单元。对支撑背板两侧圆孔处施加全位移约束。机载扫描反射镜组件的有限元模型,如图4所示。
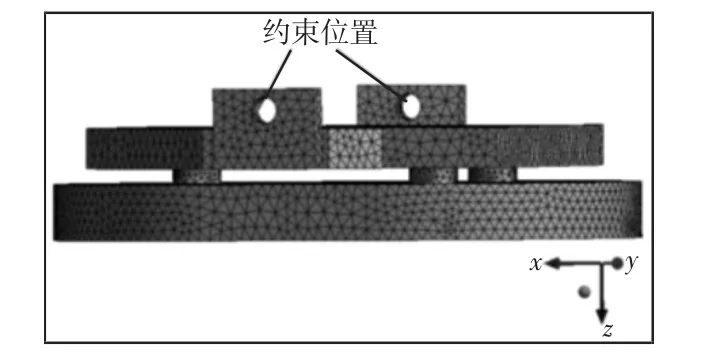
图4 扫描反射镜组件的有限元模型Fig.4 Finite Element Model of Scanning Mirror Assembly
3.3 模态分析
模态分析主要用于求解结构的自然频率和相应的振型,模态分析结果是检验其结构合理性、安全性的重要指标,是后续分析的基础。考虑到随机振动分析中施加的振动谱频率范围为(0~500)Hz,而随机振动分析所需的最大固有频率应超过振动谱最高频率的1.5倍[10]。故提取该组件系统的前4阶模态。前4阶固有频率值,如表3所示。振型,如图5所示。对前4阶模态振型进行描述。一阶振型为结构整体绕支撑背板安装孔轴线转动;二阶振型为整体沿Z轴方向上下平动,支撑背板两端局部翘曲;三阶振型为结构整体绕X轴转动,并且支撑背板一端有较大的翘曲量;四阶振型为结构整体绕Z轴平转,前部支撑位置的柔性环节有较大的平动位移。

表3 结构的前4阶固有频率值Tab.3 The First 4 natural Frequencies of Structure
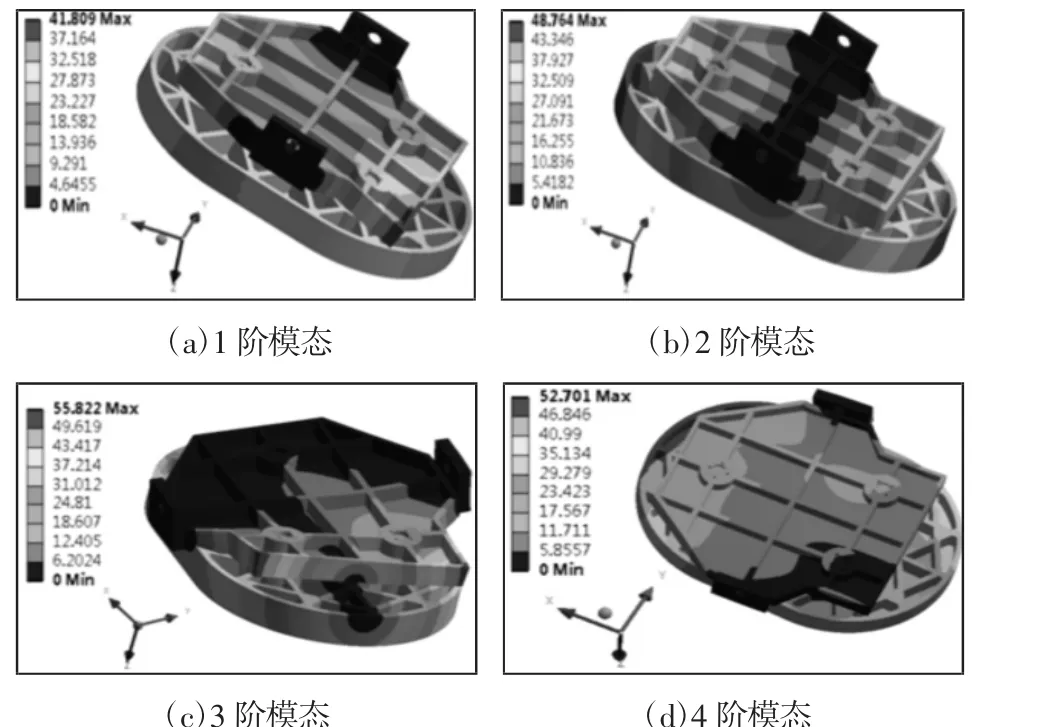
图5 系统前4阶模态Fig.5 The First 4 Modals of System
3.4 随机振动响应结果分析
根据国军标中振动试验的相关规定[2],设备应该在三个互相正交轴的每一轴向进行分析,考虑到工程实际中通常为小阻尼情况并参考文献[10],阻尼系数取0.03。沿结构的X、Y、Z三个方向分别施加的振动谱线,如图3所示。仿真计算时选取3σ区间条件下的应力分析结果。结果显示X、Y、Z三个正交方向的最大等效应力均发生在柔性铰链的薄弱环节,各方向下应力响应,如表4所示。

表4 三个轴向下最大3σ应力响应值Tab.4 Maximum 3σ Stress Response Under Three Axes
从分析结果可以看到,结构在所给随机振动条件下发生的最大应力响应为60.241MPa,而殷钢的屈服强度307MPa,安全系数ns=307÷60.241>5,所以结构有足够的安全裕度,能够承受在机载环境中产生的随机振动载荷。为了更全面地反映出扫描反射镜结构组件各处的随机振动响应情况,选取组件6个位置节点进行分析,分别为:背板安装连接孔附近(Node239924)、背板中部(Node241043)、柔性铰链薄弱位置(Node139193)、反射镜镜面中部(Node 995)以及反射镜边缘处(Node1848、Node941)。考察机载环境下随机振动对于反射镜结构位置精度以及镜面精度的影响程度,以上述6个节点为研究对象,分别计算各节点的位移响应均方根值和相对位移值。各点在不同随机振动方向的位移响应功率谱密度,如图6所示。各节点的总位移均方根值,如表5所示。
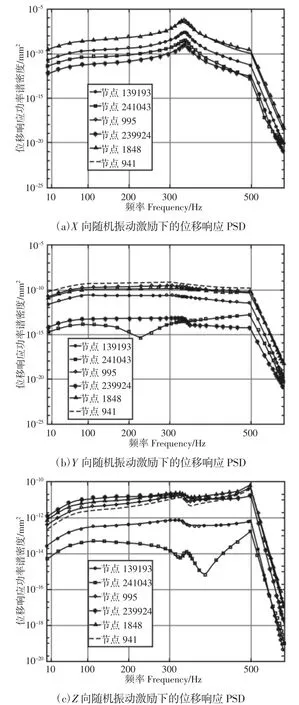
图6 采样节点随机振动位移响应值Fig.6 Random Vibration Response of Sampling Nodes
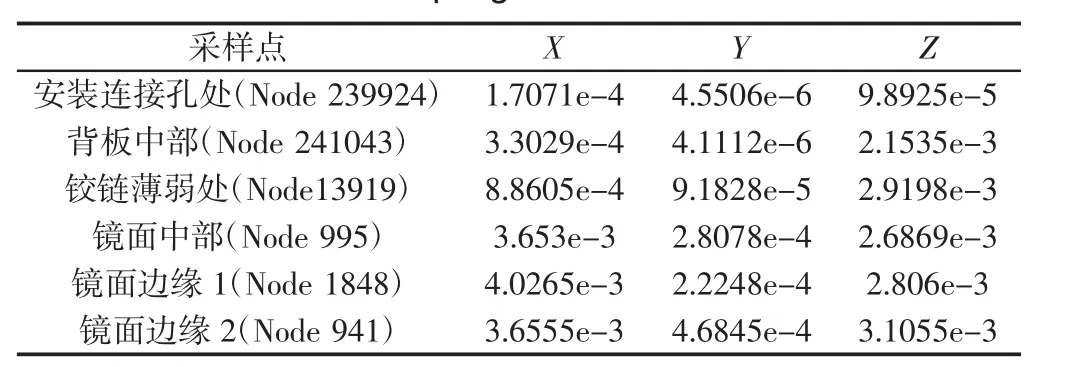
表5 采样节点的总位移均方根值(mm)Tab.5 The RMS of Total Displacement of Sampling Nodes(mm)
由以上分析结果可以发现:(1)在三个振动激励方向中,X方向(沿反射镜长轴方向)的振动位移响应最大,但均维持在10-6mm量级,反射镜结构以及镜面面形满足精度要求;(2)在X轴向振动激励下,结构基频337Hz处有较明显的振动响应,这是由结构本身的固有频率所引起的谐振。Y(沿反射镜短轴方向)、Z(光轴方向)两个方向的位移响应谱图没有尖峰出现,相较于X轴方向而言,总体趋势较为平稳;(3)在(0~500)Hz范围内,支撑结构与反射镜面在(0~100)Hz内位移响应上升较快,其余各频率处响应谱值波动幅度较小(除共振外),结构的振动响应较平稳,可见结构对于低频振动的响应更敏感;(4)从表5的计算结果可以看出各节点的总位移均方根值在10-3mm量级,能够保证动态环境下的位置精度要求。
4 结论
针对设计的某型号直升机机载扫描反射镜组件,以一种基于振动试验的谱线转化方法得到边界条件,对其进行随机振动分析,结合分析结果可知组件的设计符合初始要求,一定程度上证明了结构的合理性。(1)模态分析结果显示扫描反射镜组件基频为337Hz,远离直升机振动环境的低频激励范围,发生共振可能性小,结构刚性足够;(2)在所给随机振动载荷下的最大等效应力发生在柔性环节,与预设情况相符合,最大应力值为60.241MPa,结构有足够的动态承载能力;(3)分析了结构各处共6个位置节点的位移响应,最大面形偏差在10-6mm量级,各取样点轴向位移均小于0.01mm,表明该扫描反射镜组件在随机振动环境中能够保证足够的面形精度和位置精度。该方法的应用对于处在方案设计阶段的机载设备有借鉴意义,为直升机机载光学设备的设计与分析提供了新思路,但后期仍需进一步试验验证。
