基于PMAC定位平台的定位精度与误差补偿研究
2020-06-20张智阳
马 平,张智阳,肖 全,张 勇
(广东工业大学机电工程学院,广东 广州 510006)
1 引言
超精密定位平台是超精密定位器械中的一种,它为超精密加工、超精密定位、精密技术提供了一个可供控制精确运动的承载平台。进入纳米技术时代和信息时代,超精密定位平台在在诸如微电子工程、生物医学工程等科学研究领域有重要的地位。定位精度和重复定位精度对运动平台的精确运动定位有着重要的影响[1]。研究的气浮精密定位平台使用的是大理石导轨配上直线驱动电机,导轨由气浮轴承支撑,而且平台使用反馈精度高的光栅尺与激光尺,高的反馈精度能很好地提高定位平台的定位精度。定位平台上直线电机的结构紧凑、功率损耗小、快移速度高、加速度高、高速度。直线电机通过直接驱动负载的方式[2]。通过使用不同的反馈传感器与不同的运动状态来对比分析出影响定位平台定位精度与重复定位精度的因素。虽然平台各个部分分开拥有很好的精度,但是由于控制器的运动参数设置,反馈装置的分辨率,测量精度,直线电机的安装误差,控制方法的复杂性,气浮平台安装的误差等因素会导致定位平台的精确定位过程带来许多的不确定性。因此需要对定位平台进行误差补偿,使用螺距误差补偿与间隙补偿如PMAC控制卡中,通过编写程序将误差表中的数据补偿到定位平台的定位误差与间隙误差中,从而提升定位平台的定位精度与重复定位精度[3]。
2 龙门式二维大行程超精密气浮运动平台及其控制系统
平台必须采用全闭环的控制系统,即对直线电机采用全闭环控制。
2.1 定位平台及其控制系统
平台为二维平台,所以分别有X和Y的移动轴,两轴分别由一个直线电机控制。定位平台系统部件组成,如图1所示。

图1 龙门式二维大行程超精密气浮定位平台Fig.1 The Composition of Position Stage
气浮定位平台使用使用的直线电机采用三环控制,分别是电流环、速度环、位置环,以Turbo PMAC2为核心的IMAC400控制器,装备光栅尺和激光尺作为反馈单元。
2.2 定位精度影响因素
由于控制系统的主要控制参数已经设定好[5],在排除控制参数的影响下,其中,主要影响定位精度和重复定位精度的因素有:
(1)反馈元件的分辨率和线性率与其制造安装误差。在定位平台控制系统中,检测元件的检测精度如果达不到定位平台的需要的定位与运动精度时,定位平台就无法达到精度要求。高精度意味着高精密的反馈信息,使用高精度的反馈元件时系统可以根据反馈信息进行精密的调整,这样定位平台才能拥有更高的定位精度与重复定位精度。反馈元件如光栅尺由于安装时的安装倾斜、热膨胀变形、光栅尺与导轨不平行、接收头与光栅尺之间信号反馈不良等都会带来定位误差,还有光栅尺本身的制造过程中带来的误差。又如激光尺对光线非常敏感,当接收元件受到外界光的干扰时会影响激光尺的精度,激光头与分光镜不垂直时也会带来误差,这些都是安装不妥造成的。
(2)定位平台使用的直线电机的磁场变化,在电机端部的磁场的变化影响了行波磁场的完整性,使得电机能耗增加,推理波动变化增大,从而影响定位误差。
3 气浮精密定位平台定位精度测量与误差分析
为了确定定位平台定位精度的大小和找出影响定位精度的因素,所以通过实验测量定位平台的定位精度并通过测量结果分析引起定位平台误差的因素。
3.1 定位平台定位精度测量方案与目标
上述方法会对气浮定位平台的其中一轴Y轴进行定位精度的测量。按照定位平台的运动行程规定测量范围为300mm,根据国标GB/T 17421.2_2000[6]的相关规定,实验测量点取10个目标点,每个目标点取等间隔进行测量。实验平台的运动方式,如图2所示。利用激光干涉仪进行测量,填入实验中所处的环境系数,输入测试的间隔和总的行程,然后进行实验。

图2 线性循环测量方式Fig.2 Measuring Method of Linear Cycle Style
3.2 定位精度的测量与评定
通过其中相关联的规定并且根据ISO-2标准中有如下定义:

式中:Ri↑、Ri↓—重复定位精度;Ri—某一个测量点的双向重复定位精度;R—单一测量直线的双向重复定位精度;Bi—目标位置反向差值。

式中:A↑、A↓—目标位置的测量线单向定位精度A-测量线的双向定位精度;Si↑,Si↓—单向定位标准不确定度—目标位置单向平均偏差。
3.3 定位精度测量结果及误差分析
通过依据上述的实验方案,在分辨率为0.1μm的光栅尺反馈下且不同的定位平台运动方式下测量定位平台的定位精度与重复定位精度[7]。
3.3.1 光栅尺反馈下不同运动环境下的定位精度测量与误差分析
通过保持使用光栅传感器的条件下改变定位平台的运动状态如加速度的大小,平台的加速方式等找出平台定位精度与重复定位精度的影响因素[8]。匀加速度为100mm/s2的定位精度测量,如图3所示。

图3 匀加速度为100mm/s2的定位精度测量Fig.3 Measuring Results of Positioning Accuracy by Uniform Acceleration of 100mm/s2
定位精度测量结果为:正向定位精度A↑=23.802μm,正向重复定位精度R↑=4.904μm,负向定位精度A↓=22.834μm,负向重复定位精度R↓=5.096μm,双向的定位精度为A=24.520μm。
从图3中可以看出,定位平台除了第一个点之外,整体趋势基本依据线性变化,这就与大理石导轨由于自重而使导轨向着重心弯曲变形,从而引起了定位误差。S曲线加速最高加速度为100mm/s2的定位精度测量,如图4所示。定位精度测量结果为:正向定位精度A↑=22.797μm,正向重复定位精度R↑=2.629μm,负向定位精度A↓=21.700μm,负向重复定位精度R↓=2.704μm,双向的定位精度为A=23.134μm。从上图4中得出的结果可以明显的看出,正向重复定位精度提升了47%,负向重复定位精度提升了49%。S曲线加速最高加速度为200mm/s2的定位精度测量,如图5所示。从图5中可以看出当定位平台的运动的最高加速度变大时,平台的正负定位精度影响不大,而正向重复定位精度从R↑=2.629μm降到了R↑=3.611μm,负向重复定位精度从R↓=2.704μm降到了R↓=3.788μm。
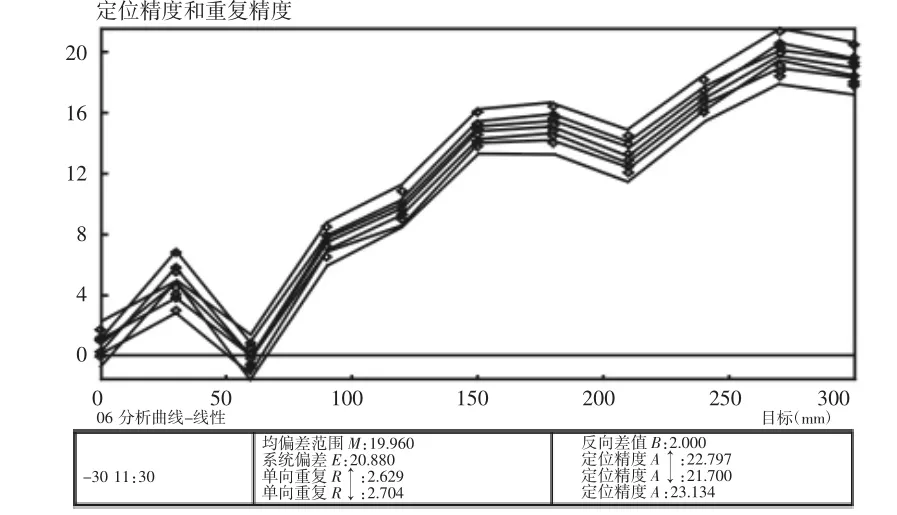
图4 S曲线加速最高加速度为100mm/s2的定位精度测量Fig.4 Measuring Results of Positioning Accuracy by S Curve Acceleration of 100mm/s2

图5 S曲线加速最高加速度为200mm/s2的定位精度测量Fig.5 Measuring Results of Positioning Accuracy by S Curve Acceleration of 200mm/s2
3.3.2 不同反馈下定位平台的定位精度测量与误差分析
接下来分析反馈传感器对定位精度的影响,在相同的反馈元件分辨率为0.01μm的条件下分析影响定位平台定位精度的因素。定位平台在激光尺的反馈下以S曲线加速,且最大加速度为100mm/s2的定位精度测量结果,如图6所示。
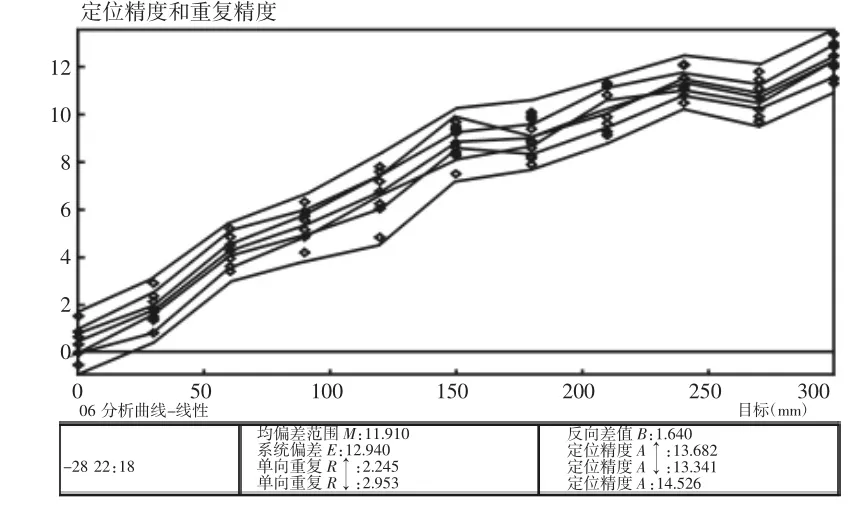
图6 激光尺反馈下的定位精度Fig.6 The Result of Position Measuring by Laser Feedback
从上述图6结果可以看出,在使用相同分辨率不同反馈元件时,激光尺的定位精度比光栅尺的要提高40%左右,而且激光尺反馈下测出的定位精度的曲线变化趋势基本线性。
4 基于PMAC的误差补偿方法
为了提高系统的定位精度,PMAC中常用的补偿方法为螺距误差补偿与反向间隙补偿[9],利用PMAC中的误差补偿方法对系统进行误差补偿。
4.1 螺距误差补偿与间隙补偿
其中主要基本思想是:通过不断循环反复测量目标点的误差值,然后通过计算求出单向平均偏差,再把单向平均偏差反向叠加到系统的插补指令中。即:


表1 正反向测量定位误差及误差补偿表Tab.1 The Table of Measuring Results of Positioning Accuracy in Positive and Backward and Error Compensation
编写误差补偿程序:
I51=1;激活补偿表
DEFINE COMP 11,3300000;补偿范围 0-3000000cts,补偿点为10个
617 0 1248 1580 2425 2473 2169 2764 3286 3129 0 ;各点补偿的值
在输入螺距补偿之后输入间隙补偿,程序为:
I51=1;激活补偿表
I286=-128;间隙误差补偿
DEFINE COMP 11,3300000;补偿范围 0-3000000cts,补偿点为10个
320-54.4-137-83-131-124-131-115-240-201 0;各点补偿的值
同时,在PMAC控制卡的补偿表中修正值的单位为1/16个脉冲数。所以补偿表的值Ni=ni×16。
通过使用激光干涉仪测量后得出定位平台各点的正反向定位误差,如表1所示。
4.2 误差补偿结果及分析
将前文的误差补偿程序输入到PMAC卡中后,对定位平台进行再一次的实验测量,其结果,如图7所示。

图7 误差补偿后的定位精度Fig.7 The Result of Position Measuring After Error Compensation
误差补偿后的定位精度测量结果为:正向定位精度A↑=4.136μm,正向重复定位精度R↑=2.143μm,负向定位精度A↓=3.397μm,负向重复定位精度R↓=1.802μm,双向的定位精度为A=6.021μm。
可以看出进行了螺距误差补偿与间隙补偿后的定位平台的正负向的定位精度都提高了81%,双向定位精度提高了74%,正向重复定位精度提高了20%,负向重复定位精度提高了33%。
5 结论
(1)定位平台的加速方式对平台的定位精度有影响,平缓的加速方式有助于提高定位精度,S曲线加速方式比匀加速方式重复定位精度提高45%。(2)定位平台运动时的最大加速度大小对定位平台的运动精度有影响,在最大加速度较小时,定位平台的最终重复定位精度会越高,提高了(20~30)%。(3)相同分辨率的传感器由于反馈元件的安装误差会影响定位平台的定位精度。(4)通过使用螺距误差补偿与间隙补偿对定位平台进行补偿之后,平台的定位精度与重复定位精度都有明显的提高。