多气隙阻性板室探测器位置分辨性能的模拟研究
2020-06-16陈晓龙俞彦成郭宝鸿
陈晓龙,俞彦成,陈 刚,王 义,*,韩 冬,郭宝鸿
(1.清华大学 工程物理系,北京 100086;2.中国地质大学 地球物理与空间信息学院,湖北 武汉 430074)
缪子成像,采用宇宙线产生的缪子作为探针,具有无损、安全和穿透能力强的优点。2003年,美国LANL建立了世界上第1个缪子成像系统[1],从此利用缪子成像技术探测重核物质就成为一个研究热点。2017年,人们利用缪子成像技术在胡夫金字塔内发现一个巨大的空腔[2],是缪子成像技术从实验室走向实际应用的重要标志。缪子成像需使用位置灵敏的探测器对缪子径迹进行测量。在过去近20年中,世界各实验室建立了不同种类位置灵敏探测器包括漂移管、气体电子倍增器(GEM)、多丝正比室、阻性板室(RPC)探测器等缪子成像系统并得到了相关的成像结果[3-6]。
RPC探测器是20世纪80年代由Santonico提出的新型气体探测器[7],具有效率高、性价比高、时间分辨能力良好以及便于大面积制造等优点,被广泛应用于各种物理实验以及实验室测试平台的搭建。后来在RPC探测器的基础上逐渐发展出了多气隙阻性板室(MRPC)探测器[8],MRPC探测器在具有以上RPC探测器优点的基础上,具有更优秀的时间分辨能力,因此被广泛应用于高能物理实验中的带电粒子飞行时间的精确测量。基于MRPC探测器优秀的时间分辨能力,可通过飞行时间测量对缪子动量进行筛选,从而提高缪子成像精度,因此成为缪子成像中1个很好的探测器选项。清华大学MRPC研究团队在长期研究MRPC探测器的基础上,采用MRPC作为缪子成像的位置灵敏探测器,在2012年建立了1个缪子成像系统TUMUTY,并得到了相应的成像结果[9]。
位置灵敏探测器作为整个缪子成像系统的核心,负责宇宙线缪子入射和出射径迹的探测,其能否对缪子径迹进行准确重建是获得最终良好成像结果的关键。因此,本文开展MRPC位置分辨优化研究。
1 MRPC位置分辨模拟方法
为研究MRPC的位置分辨能力,需分析探测器的输出信号。文献[10]和[11]中给出了有关RPC内部的雪崩倍增和信号产生机理的详细研究。当带电粒子通过RPC气隙时,就会产生一定数量的初级电子-离子对,并在电场中进行雪崩放大,雪崩产生的电子和离子会在电场的作用下进行漂移,并在电极中产生感应信号。通过Shockley-Ramo定理,可从式(1)得到电极上的感应电流[12-14]:
(1)
式中:v为漂移速度;e0为电子电荷量;N(t)为在时间t时电子的数目;Ew为将感兴趣读出电极电压设为Vw,其他电极接地时的权场。因此当确定其他电极的几何位置后,权场大小取决于选取的读出电极,且决定了运动电荷在特定电极上的感应电流。需说明的是,以上公式适用于电极之间为真空的情况,Riegler等[11]研究了电极之间存在导电介质的情况,得出以下结论:在RPC中,低电导率材料的时间常数较探测器中电荷移动的持续时间大几个数量级,因此可忽略RPC中低电导率的材料对权场产生的影响。在这种情况下,得到的权场就是静电权场。对于读出条较窄且具有多个电阻层和气隙的MRPC,不能忽略感兴趣读出条的两个相邻条对Ew的影响。因此,权场的准确计算对于分析MRPC探测器的输出信号具有重要意义。
本文首先通过ANSYS Maxwell软件[15]模拟探测器内部选取的感兴趣读出条的静电权场,在模拟工作中进行了5气隙MRPC读出电路板有、无背面覆铜接地,不同读出条间距(5、3、2.54、1.5、1、0.7 mm),以及相同读出条间距但读出条宽度在条间距中不同占比时的静电权场的状况(条间距3 mm,读出条宽度占比为20%、40%、50%、60%、80%;条间距1 mm,读出条宽度占比为20%、40%、50%、60%、80%)。再将得到的静电权场输入到构建的基于GEANT4的MRPC模拟框架中,该框架选取GEANT4的PAI模型模拟粒子的沉积能量信息,将沉积能量信息转化为电子粒子对数目后,代入通过Garfield模拟的气体参数信息,综合GEANT4中搭建的探测器几何模型,就可得到读出电极上的感应电流信息[16-17]。将读出条上得到的感应电流通过电子学卷积函数(式(2))可得到模拟的读出条输出信号的波形信息。
f(t)=A(e-t/τ1-e-t/τ2)
(2)
其中:A为电子学放大因子;τ1和τ2为成形电路的时间常数,卷积得到的波形信号的前沿和后沿的长度与τ1和τ2呈正相关,需通过试验数据进行相应的校正。模拟产生的波形可根据需求添加相应的电子学噪声。本文添加噪声的方法如下:波形信号噪声添加采用信噪比的方法,首先统计无噪声时中间条信号的幅值平均值,选取平均幅值的百分比作为信号噪声,将噪声随机添加在波形信号每个采样点上,从而得到不同信噪比下的探测器波形信号。此后将得到的波形信号积分可得到读出条上的感应电荷信息,进而通过电荷重心法(式(3))获得探测器的入射粒子重建信息。
(3)
其中:channeli为读出条的编号;Qi为该读出条上产生的感应电荷;x为重建得到的位置信息分布,其中重建位置的半高宽定义为探测器的位置分辨。
2 MRPC探测器模型构建
图1为5气隙MRPC在SolidWorks中的建模图。首先,在SolidWorks中进行探测器的模型构建(SolidWorks是一常见3D模型建模软件,操作简单直观,便于探测器细节模型构建,同时ANSYS Maxwell也支持SolidWorks建模,因此在此采用了SolidWorks的建模方法),整个MRPC探测器模型尺寸为30 mm×30 mm,主要包含外电极玻璃(玻璃厚0.7 mm,碳膜厚0.01 mm)、0.2 mm厚的mylar膜、0.8 mm厚的读出电路板(背面覆铜接地或无覆铜接地,读出条和背面覆铜厚度均为0.1 mm)、5个0.25 mm厚的气隙以及用于气隙分割的4块0.7 mm厚的内玻璃等。再将构建的框架导入到ANSYS Maxwell中,并设置各部分的介电常数,具体为:气隙介电常数1.000 6(约等于MRPC工作时标准气体混合物的介电常数,标准气体定义为90%氟利昂+5%六氟化硫+5%异丁烷);玻璃介电常数5.5;碳膜介电常数12;mylar膜介电常数3.5;读出电路板介电常数3.5等。在计算权场时,设置感兴趣读出条电压为1 V,其他读出条均设置为0 V。完成MRPC探测器在ANSYS Maxwell各部分参数设置后,选择系统中静电场的求解器,就可对感兴趣读出条的静态权场进行求解。

图1 5气隙MRPC在SolidWorks中的建模图Fig.1 MRPC mode with 5 gaps built in SolidWorks
3 结果和讨论
将得到的静电权场信息导入MRPC模拟框架。参考实验中MRPC位置分辨测试方法[18],在MRPC模拟中,设置模拟发射枪位置为探测器上40 cm处,正对着感兴趣条中央发射(模拟中只考虑垂直入射,不考虑带夹角入射),设置粒子种类为缪子,能量为4 GeV,设置探测器工作高压为±6 600 V(实验测定的与上述建模相同结构探测器在标准气体情况下的工作点)。
3.1 MRPC在不同读出条间距下的位置分辨
在不同读出条间距的模拟中包含了5种不同间距读出条下的MRPC位置分辨性能研究,每种读出条间距均包含了读出板背面是、否接地两种情况。需要特别说明的是,除去读出条间距为2.54 mm情况(其中读出条宽度为1.44 mm,相邻条间隙为1.1 mm)外,读出条宽度均为读出条间距的50%。
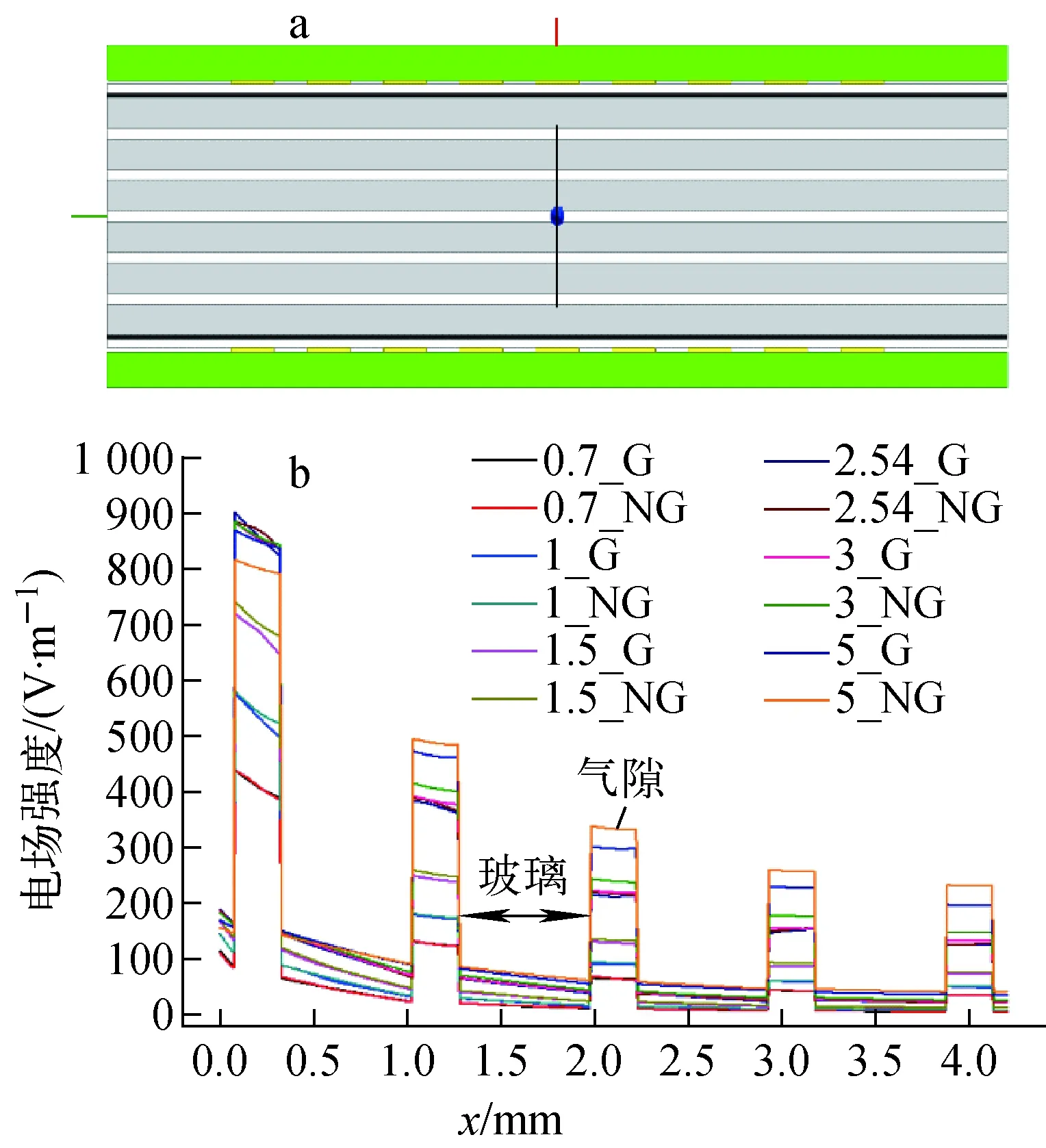
图2为将读出电路板最中间读出条作为信号读出条时(权场与所加电压无关),中间气隙中线处沿水平方向的权场分布模拟结果。从模拟结果可看到:1) 读出条间距越大,权场分布越宽,峰值越大;2) 读出条间距越大,背面接地对中间气隙中线处权场影响越大,随着读出条间距的减小,背面接地对权场的分布影响越来越弱。

a图为位置示意,b图中x轴标识为a图黑线从左到右,图中0.7_G表示读出条间距为0.7 mm背面接地的模拟结果,0.7_NG表示读出条间距为0.7 mm背面没有接地的模拟结果,文中其他相同图标采用此相同的命名规则图2 中间气隙沿中线处的权场分布Fig.2 Weighted field at center line in middle gap
图3为中间读出条中垂线处所有气隙的权场分布。从图3可看出:1) 读出条间距越大,权场在各气隙中的值越大;2) 读出电路板背面接地的情况下,权场较没有接地的小;3) 当读出条间距较小时,读出电路板背面是否接地对各气隙中的权场影响越来越小。
a图为位置示意,b图中x轴标识为a图黑线从上到下图3 中间条中垂线处所有气隙的权场分布Fig.3 Weighted field in all gaps at midperpendicular of middle strip
图4为中间读出条平均幅值统计结果。从模拟结果可看出:1) 在同一读出条间距下,读出条的幅值随噪声的增加会有一定程度的增加;2) 读出电路板背面接地对读出条幅值的影响随读出条间距变窄逐渐减小,在读出条间距为0.7 mm时,是否背面接地对读出条的影响几乎可忽略;3) 不同间距读出条的平均幅值和读出条间距有很大的关联性,读出条间距越大,读出条的平均幅值越大。
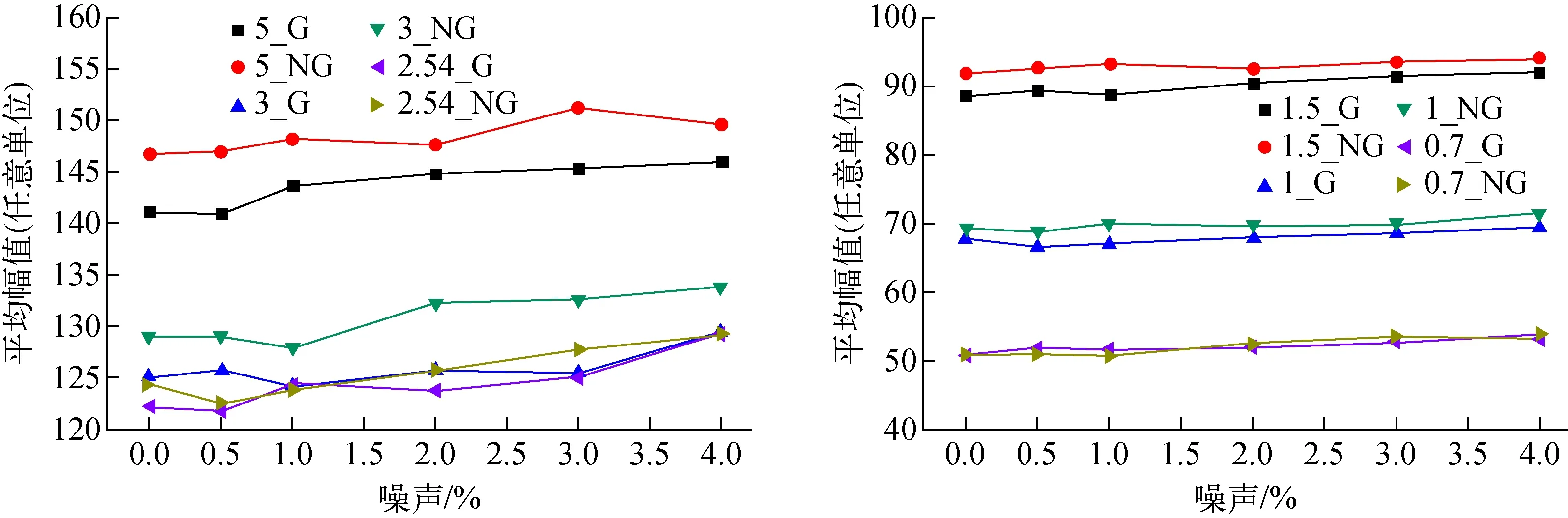
噪声百分比为统计的波形信息带有噪声的大小图4 不同条间距的中间条在不同电子学噪声状态下MRPC信号平均幅值Fig.4 Average amplitude of MRPC signal with different strip pitches under different noise levels
图5为MRPC在不同间距读出条以及不同电子学噪声水平下的位置分辨能力。从图5可看出:1) 噪声是影响探测器位置分辨的第一大因素,随电子学噪声的增加,同一读出条间距MRPC探测器位置分辨有很大差别;2) 不同读出条间距,在噪声较大时,电路板背面是否接地,对MRPC位置分辨也有较大的影响;3) 不同读出条间距的MRPC,位置分辨能力随读出条间距的增大而变差;4) 在所有其他条件一定,只考虑读出条间距时,探测器读出条间距设置为1 mm能使探测器位置分辨能力最优。从电荷重心法可看出,读出条间距和电荷量相互影响。读出条间距越大,有感应信号且信噪比足够高的读出条的数目就会减少,从而使位置分辨变差;但当读出条间距过小时,读出条上的感应信号变小,此时信噪较低的读出条会变多,从而导致位置分辨变差。因此,读出条间距存在一最优的选择,使MRPC探测器能获得最优位置分辨能力。
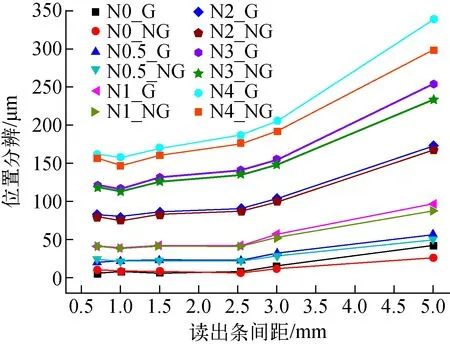
N4_G代表探测器信号有4%的电子学噪声以及读出板背面接地;N4_NG代表探测器信号有4%的噪声但读出电路板背面没有接地的模拟结果,其他标识同理图5 不同电子学噪声水平下MRPC的位置分辨随读出条间距的变化Fig.5 MRPC position resolution results with different strip pitches under different noise levels
3.2 MRPC在不同读出条宽度占比下的位置分辨
图4中,读出条间距为2.54 mm(读出条宽度1.44 mm,条间隙1.1 mm,其读出条宽度占条间距比例为56.7%)和3 mm(读出条宽度1.5 mm,条间隙1.5 mm,读出条宽度占条间距比例为50%)的平均幅值有一定的交叉,可看出,读出条宽度占比会影响读出信号的幅值,进而影响探测器的位置分辨能力。为研究最优的读出条宽度在条间距中的占比,选取了两种条间距的读出条:3 mm和1 mm,其中读出条宽度占总间距比例分别为20%、40%、50%、60%、80%,对几种情况进行研究的结果示于图6、7。
图6、7的结果显示,随读出条宽度在条间距中占比的增加,中间气隙中线处的权场最大值逐渐增大,同时权场分布的半高宽也逐渐增大,尤其条间距为3 mm时更明显。从中间条中垂线处所有气隙权场中可看到,读出条宽度在条间距中的占比增加时,各气隙中的权场也在增大。
图8、9分别示出读出条间距为3 mm和1 mm时读出条宽度在条间距中不同占比的中间条信号幅值的平均值和位置分辨结果。可看出,随读出条宽度占比的增加,信号幅值平均值在不同电子学噪声状况下均变大,但在同一读出条宽度占比情况下,不同噪声下的平均幅值变化不大。从位置分辨的模拟结果上看,当读出条间距较大时,低的读出条宽度占比对位置分辨影响较大,特别是噪声增大时,这种影响效果越明显。读出条的宽度在读出条间距中占比超过50%后,其宽度占比对位置分辨的影响可忽略不计。考虑到成本和信号的串扰问题,设置50%~60%之间效果最佳。读出条宽度与读出条的感应电流有关,因此读出条宽度占比增加时,探测器位置分辨能力会有一定的提高;但当读出条宽度占比增加过大时,相邻读出条的感应电流也会产生相互影响,从而影响各读出条感应电流的分布,因此不再会使探测器的位置分辨能力继续优化。

图6 中间读出条间距为3 mm时中间气隙中线位置(a)和中垂线处所有气隙(b)的权场Fig.6 Weighted field at center line in middle gap (a) and in all gaps at midperpendicular (b) of middle strip with strip pitch of 3 mm

图7 中间读出条间距为1 mm时中间气隙中线位置(a)和中垂线处所有气隙(b)的权场Fig.7 Weighted field at center line in middle gap (a) and in all gaps at midperpendicular (b) of middle strip with strip pitch of 1 mm
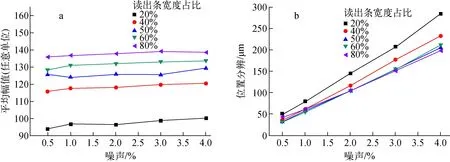
图8 条间距为3 mm时不同读出条宽度占比下中间条的幅度平均值(a)和探测器位置分辨(b)Fig.8 Middle strip signal amplitude (a) and MRPC position resolution (b) with different ratios of strip width in pitch with strip pitch of 3 mm

图9 条间距为1 mm时不同读出条宽度占比下中间条的幅度平均值(a)和探测器位置分辨(b)Fig.9 Middle strip signal amplitude (a) and MRPC position resolution (b) with different ratios of strip width in pitch with strip pitch of 1 mm
4 结论
MRPC作为缪子成像装置的径迹探测器,直接影响缪子成像结果的优劣,是系统中最关键的部件,因此开展位置灵敏MRPC探测器的研究非常重要。本文通过ANSYS Maxwell软件模拟得到MRPC的3D静态权场,将计算得到的静态权场导入到已建立的基于GENAT4的MRPC探测器模拟框架,研究了不同读出条间距在不同电子学噪声状况下读出电路板背面接地以及相同读出条间距情况下读出条宽度在条间距中不同占比时的MRPC位置分辨。
通过模拟结果得到以下结论:1) 随读出条间距的增加,MRPC探测器的位置分辨结果逐渐变差;2) 当读出条宽度窄到一定程度时,同样会降低探测器的位置分辨能力;3) 电子学噪声也是影响探测器位置分辨能力的重要因素,随电子学噪声的增大,探测器的位置分辨显著变差;4) 相同间距的读出条,不同读出条宽度在读出条间距中的占比对探测器的位置分辨也有一定影响,但读出条宽度占比超过50%以后,这种影响显著降低;5) 读出电路板背面接地对探测器的位置分辨有一定影响,但随读出条间距和电子学噪声的减小,背面接地对探测器位置分辨影响逐渐减小。因此,在其他所有条件一定的情况下,MRPC探测器针对位置分辨性能的最优读出条间距为1 mm,其中的读出条宽度在条间距中占比为50%~60%。需指出,在本文的研究中只考虑粒子入射位置在读出条中央和入射粒子角度垂直的情况,但在缪子成像应用中,粒子入射的位置和角度均具有很大的随机性,这会影响MRPC的实际位置分辨能力,特别是在大角度入射情况下,预期会有较大影响。在后续的研究中也会加入这些条件的设置,对MRPC位置分辨性能进行更深入的模拟,并结合探测器实验,进一步针对位置分辨性能优化MRPC探测器的设计。
