自动清粪机器人控制系统与设计
2020-06-16丁培峰
丁培峰
(连云港东旺奶牛养殖有限公司,江苏连云港 222248)
0 引言
随着我国经济社会的快速发展,人类对牛奶羊奶等奶制品和动物肉制品的实际需求进一步扩大,我国动物饲养逐渐向规模化、高质量化和精益化模式转变,而规模化动植物养殖场崛起所带来的动物粪便收集与处理成为困扰我国动物养殖事业的重要问题。动物养殖所产生的大量粪便不仅会占用较大的空间,更会对周围环境、土壤和水分等产生一定危害,因此,如何清理动物的大量粪便成为动物养殖业的重要思考内容。另外,我国人工智能技术的快速发展,不断将人们从基础体力劳动中解放出来,而激烈的市场竞争又进一步加大了对现代大型养殖场经营成本、生产成本和经营质量的要求,如何在保证动物养殖质量符合现有食品条安全条件和其他标准的基础上,尽可能地降低实际经营成本也是值得思考的问题。在此基础上,自动清粪机器人应运而生,不仅极大地减少了人类在动物养殖场的基本劳动,更为长远降低动物养殖场的实际成本做出了重要贡献,因此,关于自动清粪机器人控制系统设计的相关探讨和研究有着重要理论意义和现实价值。
1 自动清粪机器人的架构
通常情况下,自动清粪机器人的控制系统主要包括上位机和下位机两大部分,上位机通常负责实现对自动清粪机器人有关数据信息的实时监控,负责对下位机进行相应控制,而下位机则主要负责接收有关控制指令和接收指令,进而对自动清粪机器人的作业行为进行控制。

图1 自动清粪机器人的整体结构
图1 即自动清粪机器人的整体结构示意。在自动清粪机器人工作过程中,安装在机器人上方的摄像头将现场所拍摄到的相关场景,通过无线装置直接发送到操作室的上位机,而操作工人在观察上位机所显示的现实场景基础上,针对性地对画面所显示的相关位置进行粪便清理工作。在此过程中,操作工人主要借助上位机控制界面向自动清粪机器人发出清理粪便的指令,而该指令主要借助无线装置发送给自动清粪机器人上的无线接收模块,在无线接收装置将相应的清理粪便指令传送到下位机后,下位机按事前设定好的相关程序,在控制连接下位机继电器的基础上,利用继电器控制自动清粪机器人的总电机。最后,由总电机控制自动清粪机器人的相应执行机构,从而完成整个粪便自动清理的作业过程。
2 自动清粪机器人控制系统设计
2.1 硬件设计
由于本文所设计的自动清粪机器人采用的控制板为l298,载有相应的芯片驱动板,同时驱动两路直流电机,而每一路直流电机的控制终端都分别有3 个接口,且只有当电机控制终端的使能端接口输入较高电平时,整个驱动板才会输出电流,完成自动清粪机器人电机的整个启动过程。此外,当下位机通过控制驱动板驱动两路直流电机控制终端的接口时,就能完成整个自动清粪机器人电机的正反方向转动控制,达到控制电机转动方向的目的(图2)。
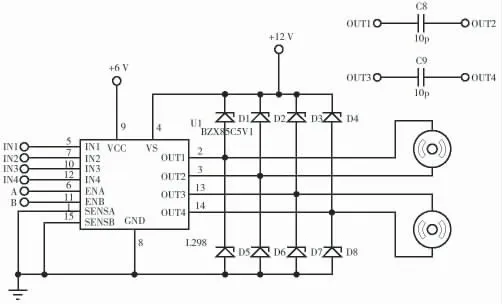
图2 电机驱动模块原理
就自动清粪机器人无线通信系统的模块设计问题而言,由于无线通信环节是整个自动清粪机器人设计的重要部分,直接关系到自动清粪机器人现场作业和远程控制计算机之间的密切配合度,更是整个远程控制计算机和自动清粪机器人图像信息显示和各种控制数据信息传输的通道。图像无线传输系统主要负责将移动的自动清粪机器人前方拍摄到的相关图像传输到上位机,形成一定的视频文件供远程控制处的计算机和操作工人需要,而数据无线通信系统则主要负责传递自动清粪机器人和上位机之间机器人的移动状态、机器人状态参数以及远程控制指令等,从而为整个自动清粪机器人完成粪便自动清理工作提供技术支撑。在自动清粪机器人无线通信系统模块图像无线传输子模块系统中,由于图像无线传输系统是整个控制系统中不容缺失的重要部分,更是直接为自动清粪机器人、操作人员提供相应视频信息和可靠数据的重要条件,因此,只有操作人员借助相关视频数据尽可能全面地了解自动清粪机器人的实际工作环境时,才能将机器人周围的工作环境是否清洁和是否需要进一步进行粪便处理等相关指令反馈给无线通信系统模块,才能根据相关信息汇总作出是否发布指令驱动自动清粪机器人的相关决定。
2.2 软件设计
就本文所设计的自动清粪机器人而言,其下位机软件主要采用C 语言进行编写,程序编写方便快捷的同时具有结构清晰的特点,更能方便地对硬件系统实际操作能力进行高效率编译。同时,利用C 语言对下位机运行程序进行编码,也比一般汇编语言高级很多,能够有效提升源代码的可读性。在此过程中,整个自动清粪机器人的主要程序设计思路为:开机时对机器人程序系统进行初始化,然后利用自动清粪机器人拍摄头像所拍摄到的图片传递给控制中心,进而等待控制中心操作人员发送相关指令,当收到控制中心所发出的实施指令时,进一步将收集到的相关指令传输给下位机进行处理,而下位机驱动自动清粪机器人做出相应的粪便清理行为。
3 自动清粪机器人的运动轨迹模型
由于本文所设计的自动清粪机器人两个后轮作为相对独立的驱动轮,分别由直流电机控制,借助转速控制方向,不仅具备了自重较轻、承载能力较大、结构较为简单等诸多优势,更具有驱动和控制相对方便、行走速度较快以及灵活机动等重要特点。在此基础上,本文根据相关学者所提出的轮式移动机器人运动学建模理论,利用几何中心和质心不重合的非理想约束简化模型对自动清粪机器人进行运动轨迹模拟。简化后的自动清粪机器人运行机构主要包括同轴的驱动后轮和刮粪板,三点所确定的平面能有效借助刮粪板充当从动轮转向作用。同时,自动清粪机器人的两个后轮由独立的直流电机驱动,前方刮粪板能有效作为支撑轮,在后方驱动轮的作用下使自动清粪机器人向目标方向移动。
4 机器人运行轨迹规划算法的优化实现
一般而言,自动清粪机器人的基本行为主要包括Changedirection 行为、Follow-wall 行为和Move-to-alone 行为。
(1)Change-direction 行为主要是自动清粪机器人在预先所设定好的轨迹上行驶,当突然碰撞到进入预定轨迹中的人或其他动态障碍物时,借助电流传感器检测到相应的驱动电机电流瞬间增大的方式,而迫使自动清粪机器人立即停止前进行为,并在向后行驶一定距离后进行方向旋转以避开动态障碍物。
(2)Follow-wall 行为是自动清粪机器人按照预先设定好的轨迹正常行驶,而周边环境具有一定数目的固定的可测量距离的静态障碍物时,该行为模式被激活。机器人借助相应的超声波传感器,不断检测周边静态障碍物之间的距离,通过控制系统判别距离是否符合预先设定值,从而判别整个自动清粪机器人的运动轨迹是否偏离。
(3)Move-to-alone 行为则主要是指自动清粪机器人在正常行走过程中,周边环境无可供超声波传感器测量距离的静态障碍物存在时的实际运行模式。
5 结束语
总之,自动清粪机器人在对其养殖场静态障碍物和不时出现的动态障碍物进行分析探究的基础上,所提出的路径规划算法能有效缩短动态环境中机器人所需的实际行走路程。同时,加大对自动清粪机器人工作目标、周边工作环境以及行程路线等的调整,而大幅度提升机器人对周围环境的适应能力,借助改变机器人行为状态、参数信息和改变行为算法模型等诸多方式,加强自动清粪机器人的实际工作效率,也为我国智能农业的发展提出了一定思路。
