特高压换流站立式绝缘子清洗机器人机械手视觉伺服定位控制
2020-06-15李红军
严 宇,江 维,张 安,李红军
(1.国网湖南省电力有限公司 检修公司,湖南 长沙 410004;2.武汉纺织大学 机械工程与自动化学院,湖北 武汉 430073;3.工业雷管智能装配湖北省工程研究中心,湖北 武汉 430073)
随着我国电网建设的快速发展,各地区电力能源互联关系越来越紧密,作为在高压输电系统中完成交流电变换为直流电或者将直流电变换为交流电转换的重要装备,特高压变流站[1-4]对于电力系统安全稳定运行及电能质量的提升具有至关重要的作用,可以说特高压变流站是我国电力系统大规模输送清洁能源的“落点站”和“源动力”。由于换流站特殊的超强电磁场环境和恶劣的自然环境,站内设备尤其是立式绝缘子表面污秽严重,容易产生绝缘子污闪现象[5-8],显著降低了绝缘子的憎水性能和电气性能,给换流站设备安全运行带来极大的安全隐患,因此,为保证特高压换流站的正常稳定运行,需要定期和不定期的对站内立式绝缘子串进行清洗作业。
根据绝缘子清扫方式主要可分为停电清扫[9-10]和带电清扫[11-12]两种途径,停电清扫需专业人员在作业区域停电时携带擦拭工具攀爬至设备上进行绝缘子的清扫,劳动强度大,清洗效果差,为解决此类问题, 国内外多家机构很早就开始进行绝缘子表面污秽清扫作业研究,具有一定代表性的就是高压绝缘子清洗机器人的研究[13-14],然而,在绝缘子清洗机构与机器人的设计与开发方面多见于输电线路悬垂绝缘子清洗机器人的研发,其主要是通过毛刷和攀爬机构实现悬垂绝缘子的清洗,机器人主要依赖于人工操控,智能行为能力较弱,为进一步提高特高压换流站立式绝缘子机器人的清洗效率,立式绝缘子的自动识别与定位是第一步,它是机器人视觉伺服控制的基础。目前绝缘子识别的主要方法通过视觉处理算法实现,如常用的CANNY算子[15-16],改进CANNY算子[17-18],Hough变换[19-20]等,上述算法在一定程度上解决了绝缘子的识别问题,但是识别精度、以及算法的效率需要进一步的深入研究,更重要的是将视觉识别算法用于机器人机械手视觉伺服控制是提升机器人作业智能行为能力的关键。因此,寻求一种智能的方法获取实现绝缘子的在线识别与定位是绝缘子清洗机器人研究中的一项重要关键技术。
基于此研究背景,为实现绝缘子自主识别定位与清洗,进一步提高特高压绝缘子清洗的作业效率,保障特高压换流站稳定运行,本文设计了一种绝缘子清洗机器人,该机器人通过移动机载平台,搭载具有多自由度的机械臂系统,通过机载平台运动接近达立式绝缘子,然后通过机械手上搭载的摄像头获取作业环境照片,根据绝缘子的几何特性,提出了一种基于最小二乘法的立式绝缘子识别与定位算法,并用于机器人机械手的视觉伺服控制,通过多自由度机械臂系统的伸缩、旋转、横移、纵移等基本动作,将机械臂末端自主送入作业空间,实现立式绝缘子串的自主识别与定位,通过位于末端上的两组高压喷头对绝缘子串进行喷水清洗作业,由规范的作业流程从上到下,由下到上进行清洗作业,最后,开发了特高压换流站立式绝缘子清洗机器人物理样机,通过现场运行验证了本文所提出的绝缘子识别算法及绝缘子清洗机器人视觉伺服控制的有效性和工程实用性,为实现换流站的智能稳定运行提供了有力技术保障。
1 绝缘子清洗机器人机构设计与清洗运动规划
1.1 立式绝缘子作业环境与结构分析
如图 1所示为立式绝缘子串的结构示意图,立式绝缘子串由多片单片绝缘子构成,立式绝缘子主要分为顶部、中部、底部三个部分,机器人在进行绝缘子串清洗的时候对三个部分轮番冲洗,机械手通过搭载的摄像头获取环境信息,对绝缘子进行捕捉与定位,由于机械臂的不同运动状态导致末端不同位姿,从而导致摄像头与绝缘子之间不同视角,理论上讲,所获取的绝缘子边缘主要有圆形、椭圆形、弧边梯形等三种形态,分别对应摄像头与绝缘子之间的成像角度为正视图、俯视图和侧视图三种,由于摄像头在机械臂上的安装位置是固定的和已知的,因此,通过转换,可以得到机械臂与作业对象绝缘子的位姿关系,从而实现机器人的视觉伺服定位控制。

图1 立式绝缘子串的结构示意图

图2 绝缘子清洗机器人的实体结构图
1.2 绝缘子清洗机器人机构设计
通过绝缘子清洗需求分析,设计如图2所示的绝缘子清洗机器人机构,整个机器人系统包含两个部分,第一部分为车载平台系统即移动机器人,第二部分为机械臂系统,其中车载移动平台可以搭载机械臂通过履带在地面行驶,并接近特高压立式绝缘子串,当车载平台定位到绝缘子串附近后,车载平台停止前进,此时机械臂系统开始动作,机械臂系统是一个5-DOF机构,包含伸缩关节1,旋转关节1,伸缩关节 2,旋转关节1,俯仰关节,总共 5个关节,末端呈大夹爪的形式,作业过程中,通过5-DOF机械臂系统各关节协调运动将作业末端送至工作位,将立式绝缘子卡在作业末端夹爪正中心,通过俯仰、旋转、伸缩关节的协调运动和高压喷嘴,对立式绝缘子上下来回进行多轮清洗作业。
1.3 绝缘子清洗机器人清洗运动规划
特高压绝缘子清洗机器人的作业运动规划主要分为以下几个部分,首先车载平台搭载作业臂系统通过履带在地面上移动靠近绝缘子串如图3(a)所示,当可以通过伸缩机构伸长作业末端能够将绝缘子串卡在末端夹爪中央时,车载平台停止运动如图3(b)所示,然后机械臂两个伸缩关节伸长,旋转关节旋转,将作业末端送到工作区,并将立式绝缘子串卡在末端中央,从顶部开始如图 3(d),到中部如图 3(e),再到底部如图3(f)通过位于末端上的两组高压喷头水枪对绝缘子进行水冲洗作业,在完成由上到下的一轮清洗作业后,根据绝缘子表面污秽的残留情况,重复此过程完成对绝缘子的多轮清洗作业,直到绝缘子污秽清洗干净或满足性能绝缘子电气性能要求时,整个清洗作业过程结束。

图3 机器人绝缘子水冲洗作业运动规划
2 基于最小二乘法的绝缘子识别方法
2.1 最小二乘法的基本原理
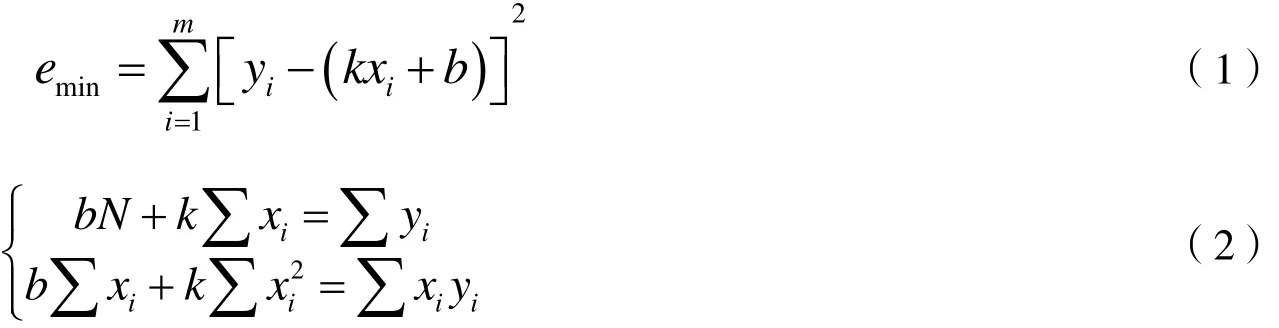
最小二乘法是一种最常用的数学优化技术,它通过最小化误差的平方和寻找数据的最佳函数匹配,利用最小二乘法可以简便地求得未知数据,并使得这些求得的数据与实际数据之间误差的平方和最小。最小二乘法多用于曲线拟合,及解决一些可通过最小化能量或最大化熵的优化问题。下面以直线拟合来简要描述最小二乘法的基本原理,在直线拟合的时候,其基本的原则是使得坐标点xi所对应的实际点yi和拟合y之间的误差能够尽可能的小,即满足(1)式的性能指标要求,为求得误差最小值,在(1)式中,分别对k和b求偏导数,可得(2)式,再根据(2)式所得到的方程组,可求得满足误差均方最小的参数k,b如(3)式所示。在绝缘子的识别研究中,主要是圆形和椭圆形的拟合问题,其方法与直线拟合流程类似,只是参数个数有所增加,完全可以效仿本节的内容。

2.2 椭圆一般方程的推导
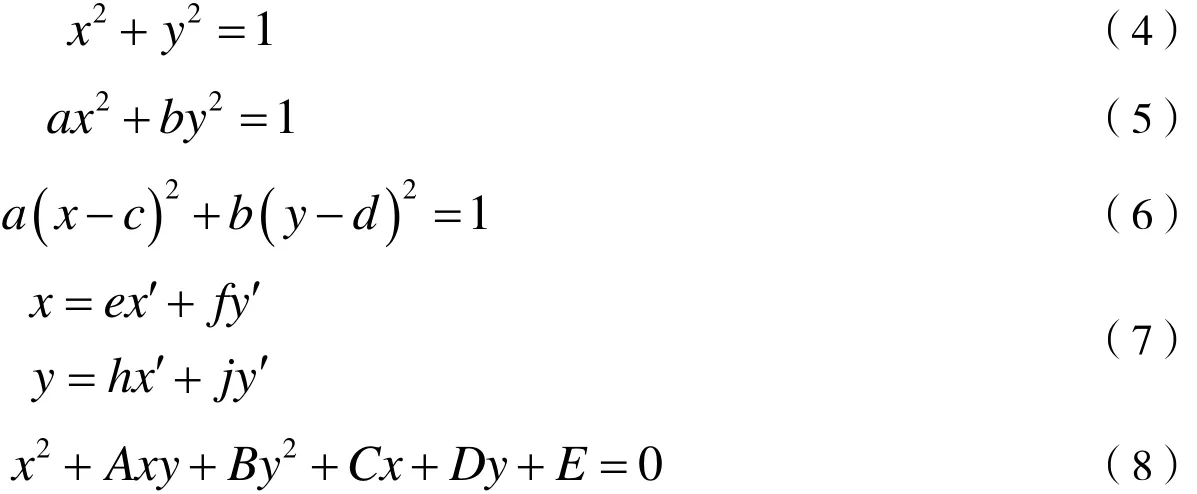
在绝缘子识别过程中,由于摄像头成像角度不同,其边缘一般为圆形或者椭圆形,且椭圆形的几率更大,而圆形又是椭圆形的特殊形式,因此,在绝缘子识别过程中,首先需要推导出椭圆的一般方程。对于圆心在坐标原点半径为 1的圆的方程为(4)式,由于椭圆长轴和短轴不等,所以在标准圆方程的基础上加入缩放因子可得(5)式,由于(5)式椭圆中心与原点重合,通过平移椭圆圆心可得(6)式,更一般化,在(6)式中加入旋转因子(7)式,并通过化简可得椭圆的一般方程为(8)式。
2.3 绝缘子的识别过程
单片绝缘子的边缘一般呈现为椭圆状,因此,单片绝缘子的识别主要过程为在图像上取点,并计算测量点到理想椭圆距离的平方和最小这一准则来确定理想椭圆,即识别到的绝缘子平面,设Pi(xi, yi)为椭圆轮廓上的测量点,根据距离平方和最小原则,可构造距离目标函数如(9)式所示,根据最小二乘法的基本原理,为求得目标函数最小值,用目标函数分别对目标函数中的参数A、 B、 C、 D、 E求一阶偏导数,并令一阶导数为0可得(10)式,因此,可构造出便于MATLAB软件求解的矩阵方程,从而求解椭圆方程中的5个系数。

由式(10)所得方程组可求得椭圆参数 A、B、C、D、E,即满足最小平方误差的绝缘子边缘椭圆方程的系数,椭圆方程确定后, 当Pi(xi, yi) <0 表示点Pi(xi, yi)在椭圆曲线内部,Pi(xi, yi)>0 表示点Pi(xi,yi) 在椭圆曲线外部。对单个绝缘子来说,解得椭圆方程后,即可将椭圆内部即绝缘子盘面提取出来,即满足Pi(xi, yi) <0 的点Pi(xi, yi)都在椭圆内部,当遍历椭圆内的无数点,这些点的集合就是识别得到的绝缘子面,从而实现绝缘子图像的重构与识别。
2.4 绝缘子清洗机器人的视觉伺服控制
基于 2.3中绝缘子的识别结果可以对机器人的机械手实施视觉伺服控制,其主要流程为:多自由度机械臂系统通过移动车载平台缓慢靠近立式绝缘子串,启动机器人视觉伺服控制系统,作业臂各关节开始运动,位于作业末端上的摄像头采集作业现场图像信息,通过视觉算法和视觉系统对获取的现场图像信息进行处理,得到现场作业环境的边缘图像,将边缘图像与不同角度下的标准库(椭圆、圆、梯形)进行比较,获取摄像头与绝缘子之间的位置关系,由于摄像头的安装位置为已知信息,通过这种方式转换可以获得机器人的作业机械手与作业对象立式绝缘子之间的相对位姿关系,从而实现机器人机械手对于立式绝缘子的自主捕捉与定位视觉伺服控制。机器人机械手的视觉伺服控制流程如图4所示。

图4 绝缘子清洗机器人视觉伺服控制系统结构图

图5 机器人绝缘子更换作业试验
3 现场作业试验
通过机械系统、电气系统和软件系统的集成设计,开发了立式特高压绝缘子清洗机器人物理样机,为进一步检验本文所提出的立式绝缘子清洗机器人机械手视觉伺服控制及绝缘子识别方法的有效性,在现场作业实验环境下,利用机器人机械手视觉伺服控制进行了绝缘子清洗作业试验,其详细的绝缘子清洗作业过程如图5所示,通过车载移动平台搭载的多机械臂系统伸缩、旋转等关节运动,作业末端顺利将立式绝缘子卡在了中央,两对喷头上下多轮冲洗,绝缘子污秽被清除,满足电气性能的要求,整个作业过程中,机器人关节运动流畅,没有发生机器人机械手与绝缘子之间的碰撞与干涉,人机交互协调,机器人顺利完成了立式绝缘子的清洗作业任务,并取得了良好的清洗效果。
通过现场作业试验绝缘子清洗结果可知,本文所开发的绝缘子清洗机器人能实现特高压换流站立式绝缘子的清洗作业,且从清洗方式上看,人工清洗、机器人人工操控下的清洗、机器人视觉伺服控制下的清洗,其作业效率逐级提高,机器人的智能性不断增强,在绝缘子识别效果方面,基于最小二乘法的识别效率也高于人工识别方法,因此,绝缘子识别精度变高,机器人绝缘子清洗效率大大提高,实用效果良好。
4 结论
(1)提出了一种通过机载平台搭载多机械臂系统的特高压立式绝缘子清洗机器人作业系统平台,通过机械臂各关节的协调运动,将末端定位至绝缘子,并由位于末端的两对高压喷头实现了对绝缘子进行清洗作业。
(2)基于绝缘子的几何特性,提出了一种基于最小二乘法的绝缘子识别方法,并将其用于机器人的视觉伺服定位控制,实现了机器人作业机械手对于立式绝缘子的自主捕捉与定位,提高了机器人作业效率。
(3)通过系统集成设计,开发了机器人物理样机,通过仿真实验和现场作业试验,验证了本文所提出的绝缘子识别算法及基于该算法的机器人机械手视觉伺服控制方法的有效性和工程实用性。