220kV高压电力极端环境下带电作业机器人控制方法研究
2020-06-15邹德华李红军
邹德华, 江 维, 李红军
(1.国网湖南省电力有限公司 输电检修分公司,湖南 长沙 410100;2.武汉纺织大学 机械工程与自动化学院,湖北 武汉 430073)
电力是国民经济的命脉,高压线缆是电能传输的重要通道,其特殊地理环境和恶劣自然环境会导致线上多种不同故障发生,为保障高压输电线路的安全正常稳定运行及有效降低经济损失,需要定期和不定期地对导线金具及其运行环境进行检修维护和施工作业。目前,这类在危险、恶劣环境下的特种作业均是由人工来完成,不仅劳动强度大、作业效率低而且存在极大的人身安全风险,对于远离杆塔处的维修作业,只能停电进行作业。随着输电质量与作业安全性的考核指标越来越高,以及现代电力系统作业与管理自动化的迫切需求,这种人工作业方式与现代高质量电力输送之间的矛盾愈发凸显。因此,带电作业机器人[1-4]替换人工进行带电作业是一种有效的措施,其对于提高作业效率、作业可靠性、作业人员安全性具有重要的实际应用价值。带电作业机器人行走于大柔性的输电导线,在众多的极端扰动因素[5-6]中超强电磁干扰和导线大柔性对系统的影响是不可避免的,此外,风载荷以其随机性和多发性占据着主要影响因素,由于随机高空风载荷[7-8]将使机器人末端摄像机摆动频率过大对焦困难,造成定位图像模糊,产生大量无效照片或视频,不仅耗费内存资源而且导致视觉伺服控制过程变长、通信卡顿、定位精度变低等,此外,由于风载荷的作用导致机器人抖动发生及重心的偏移,机器人在线上运动过程中特别是旋转动作,由于自身重量以及导线的柔性弧垂,机箱重心会相对地面下降也会影响到末端定位控制,这些在工业机器人领域无需考虑的问题在特种极端作业环境下显得尤为重要,因此,研究电力极端环境下的柔性导线带电作业机器人鲁棒控制具有较强理论意义实际应用价值。
1 机器人-大柔性输电导线间的耦合数学模型
目前传统方法中所建立的是自然理想状态下的架空导线数学模型,其忽略了弧垂对于机器人作业控制的影响,然而,当机器人在导线上行走时,由于机器人的附加重量,导线会产生附加弧垂,会对机器人机械臂末端定位精度造成影响。随着机器人在导线上的行走,运动到不同位置都有不同的弧垂,因此,机器人本身和作业环境中的导线存在一定耦合关系,附加机器人重量的弧垂示意图如图1所示。
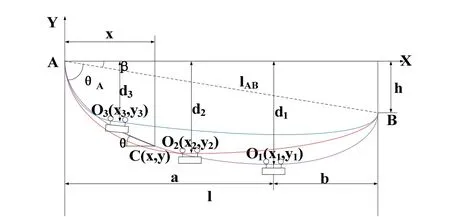
图1 附加机器人重量的大柔性输电导线弧垂示意图
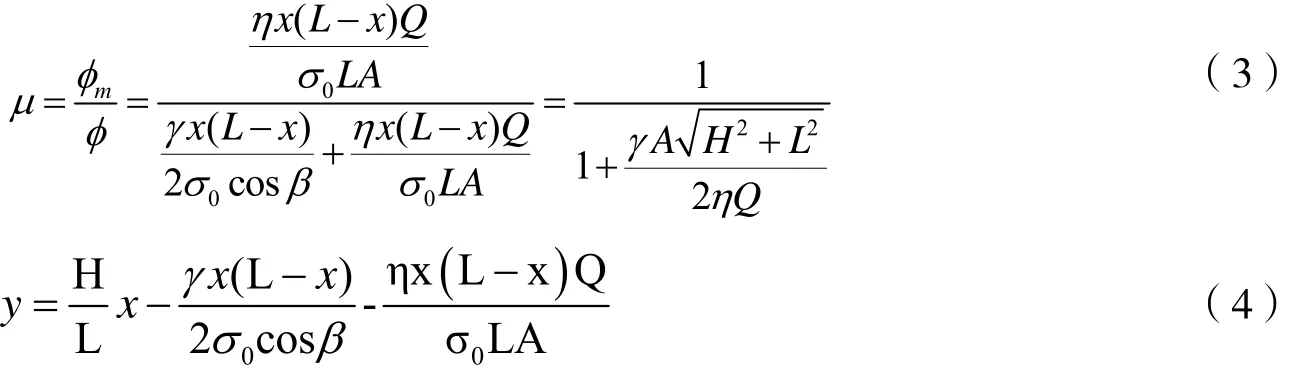
在图1中,以AB连线与机器人重心所在的竖直线的交点为坐标原点,L为档距,x为机器人所在位置相对于A的横坐标,y为纵坐标,因此,可得到附加机器人重量的总弧垂为(1)式。其中,n为冲击效应的增大系数,A为导线为截面积,Q为附加重量,即为机器人的重量。通过对弧垂数学模型求导可得, 当x=L/2,即在档段的中间处自然弧垂和附加弧垂最大,附加机器人重量的总弧垂最大值为(2)式。

设附加弧垂与总弧垂的比值为附加弧垂比μ,如(3)式所示,因此,档距和高差越大,弧垂附加弧垂比越小,所以,斜抛物线公式要改进为附加机器人重量的斜抛物线公式(4)式。
2 风载荷作用下机器人侧倾数学模型
如图2所示为风载荷作用下机器人侧倾示意图,其中图2(a)为理想情况下无风载荷作用示意图,机器人无侧倾,图2(b)为实际风载荷作用下,由于风力,整个机体包括作业末端出现了侧倾角ϑ。作用于机器人上的风载荷受力可以分为横向风力Fx,升力Fy,机器人行驶方向的风力Fz。其中,Fz方向与机器人行驶同向或反向;横向风力Fx、升力Fy主要影响机器人在以导线为轴线的左右横向摆动和上下振动2个方向的扰动,并且呈现一定的周期性。根据准静态理论可得横向风力Fx如(5)式所示,其中ρ为空气密度,α为风速不均匀系数,K为空气动力系数,Kh为高空风速增大系数,A为迎风侧投影等效面积;v为风速,ξ为横向风力与机器人机箱迎风面的夹角,因此,可以得到机器人的侧倾风偏角ϑ为(6)式。

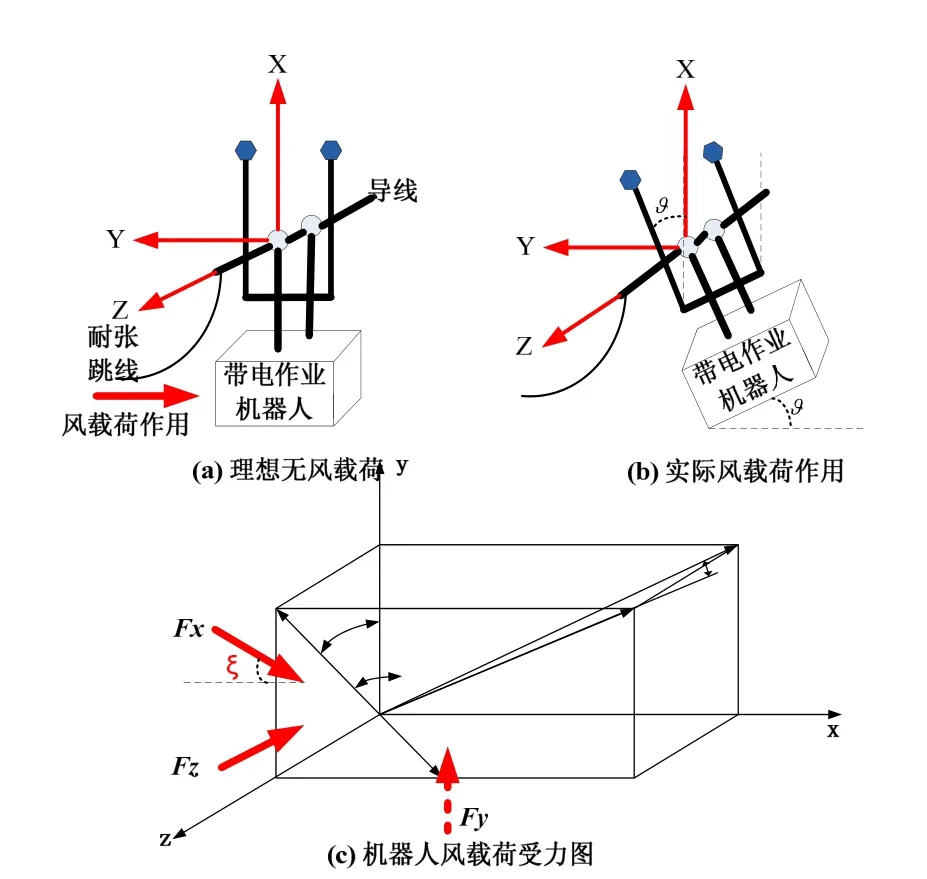
图2 风载荷作用对于机器人控制的影响示意图

3 机器人进出电磁场等效模型
高电压、强电磁干扰对于机器人运动的影响,其关键是高压导线周围电磁场的分布及机器人的防电磁干扰控制方法。空间任意一点的电场强度可采用等效电荷法进行计算,输电线路上的电荷为线电荷,且导线半径远小于杆塔高度,因此,可认为等效电荷处于导线中心,在求出单位导线的等效电荷后,根据叠加原理可以得到空间场强的数学表征E为(7)式。其中xi,yi是导线I(i=1、2、3、…、m) 的坐标,m是导线数目;Li是导线I与计算点的距离,Li*则是导线i的镜像与计算点的距离,U是输电导线对地电压矩阵;Q是各导线等效电荷矩阵;χ是输电导线电位系数组成的方阵。

因此,通过计算分析可知离线路中心越近,电场强度越高,随着机器人与带电导线进一步地接近,电磁感应作用愈来愈强,两者间局部场强也越来越高,当机器人与导线间距足够小的时候,空气发生游离,机器人与导线通过空气放电,当机器人轮子完全着线或者作业末端接触到作业对象时,正负电荷中和完成,两者处于同一电位,可见机器人与导线等电位过程将产生较大的暂态电容放电电流,当机器人沿绝缘体靠近带电导线时,空气发生电离,形成一个放电回路,放电瞬间相当于开关k接通,冲击电流初始值Is=U/R,其中U为机器人与带电导线之间的电位差,R为机器人本体电阻。
4 试验研究
4.1 超强电磁干扰工频耐压试验
带电作业机器人工作于高电压、强电磁干扰环境下,为验证机器人在强电磁干扰环境下的作业能力,在高电压试验大厅对机器人进行工频耐压试验,通过紫外成像仪测得的机器人紫外成像如图3所示,在220kV和330kV电压等级下机器人的运行状态如表1所述。

图3 高压大厅机器人紫外成像图

表1 机器人工频耐压试验结果
从机器人的工频耐压试验结果可知,在220kV和330kV高电压情况下,机器人各项指标都正常,机器人能够实时准确接收并响应地面基站的控制指令,地面基站能够实时准确接收并显示机器人的状态反馈信息,安装在双作业机械手上的4个摄像机正常工作,图像视频信息传递清晰流畅,机器人各关节运动表现了较强的鲁棒性。

图4 带电作业机器人现场作业试验
4.2 现场作业试验
为进一步检验极端高压电力环境下柔性导线检修作业机器人控制方法的工程实用性,在中国湖南省电力公司输电检修分公司带电作业中心管辖的 220KV高压输电线路上进行机器人带电作业试验,机器人作业手由初始位姿经各关节协调运动到达绝缘子更换及引板紧固作业状态,其作业现场如图4所示。通过现场作业试验图4可知,在以风载荷为主要外部扰动和大柔性、超强电磁场的固有干扰实际带电作业环境下,机器人各关节协调运动,机器人双移动臂、双作业手由初始状态进入到工作状态,再到螺栓定位及捕捉定位等关键状态下,整个过程机器人双作业手及其末端各关节动作流畅、连续、平稳,机器人作业臂运动获得了较好的鲁棒性,该方法获得了较强的工程实用性,进一步提高了机器人作业效率,并且一定程度上体现了机器人作业的智能性。
5 结论
本文建立了大柔性输电导线带机器人自重的弧垂数学模型,探究了高空随机风载荷作用下机器人的侧倾模型,给出了极端环境下超强电磁干扰的分布特性,为极端环境下,机器人鲁棒运动控制奠定理论基础。通过工频耐压试验、现场极端环境作用下机器人绝缘子更换和引流板紧固带电作业试验进一步验证了机器人控制算法的工程实用性,从而进一步提高了机器人的作业效率及作业智能性。后续的相关研究主要包括对于超强电磁干扰的数学描述进行定量计算及其智能鲁棒控制算法与系统的设计开发。