超空泡航行体流体动力数值研究
2020-06-15祝许皓
李 杰,祝许皓
(1.上海交通大学船舶海洋与建筑工程学院工程力学系,上海 200240;2.水动力学教育部重点实验室,上海 200240)
0 引言
航行体水下高速航行时,表面附近的水因低压而发生相变,形成覆盖航行体大部分的空泡或全部表面的超空泡。由于蒸汽的摩擦系数远小于水,使得航行体阻力大幅减小,从而使水下航行体的航速迅速提升[1]。近年来,超空泡现象引起了国内外学者的广泛关注,在超空泡航行体流体动力方面也开展了一系列的研究工作[2-4]。在初始扰动或者其他扰动影响下,往往会引起航行体不同方向的转动。如果航行体在沿轴向运动的同时绕其头部摆动,尾部会与空泡壁面发生碰撞反弹现象,即尾拍现象[5]。由于超空泡航行体运动速度高,采用实验手段难以较为完整地获得尾拍时的流动景象。因此,结合现有实验观察所获得的信息,国内外学者在研究尾拍问题时采用了诸多假设和简化。其中,Pratap等[6]建立了航行体在垂直平面内尾拍飞行时的简化模型。何乾坤等[7]分析了流固耦合作用对流体动力的影响,给出了尾拍过程中航行体受力的变化规律。王瑞等[8]通过改变测试工况对尾翼的流体动力特性开展实验研究。张木等[9]、施红辉等[10]等分别开展了超空泡航行体的相关实验。
本文结合之前的研究成果,基于商用工程软件 Fluent对航行体的非定常超空泡流场进行求解,对航行体的流体动力进行分解和建模,获得了包括尾拍力在内的超空泡航行体流体动力公式。
1 数值仿真模型
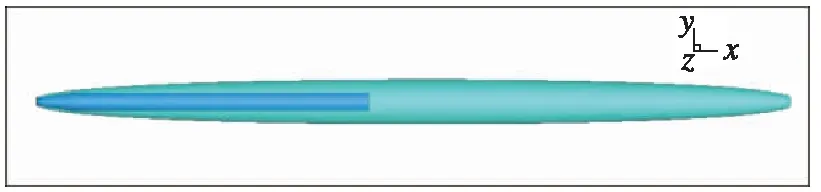
计算模型及边界条件设置以国外超空泡航行体外形尺寸为参照(图1),其结构外形尺寸及属性见表 1。

图1 超空泡航行体模型Fig.1 Model of supercavitating vehicle

表1 超空泡航行体参数Tab.1 Parameters of supercavitating vehicle
本文对计算流域采用笛卡尔坐标描述,坐标原点坐落在航行体质心,以从头到尾的轴线方向为x轴正向,初始时刻沿水平方向,y向与重力方向相反,z向与x轴、y轴方向垂直。整个计算域为圆柱体,总长度为航行体长度L的6倍,半径为L,其中入口到航行体前端为1.5L,尾部距离出口为3.5L。
航行体头部前方的平面边界及柱面部分采用速度入口边界条件,航行体尾部后面的端面边界取压力出口边界条件,环境压力设为一个大气压力101325 Pa。饱和蒸汽压力取3540 Pa。在定常来流算例中来流速度为100 m/s,航行体固定不动;在自由运动算例中来流速度为0 m/s,航行体具有沿x轴负向的初始速度。
采用的计算网格均为六面体结构化网格,如图2 所示,在压力梯度变化较大的区域如航行体头部附近及空泡闭合区域附近对网格进行加密,边界层网格厚度为1×10-4m。由于本文还需要对尾拍过程中的流场特性进行研究,因此为了保证航行体发生尾拍时的计算精度,对航行体尾部附近的网格进行了加密处理。

图2 计算网格Fig.2 Computational mesh
2 数值模拟方法的验证
图3为定常来流速度为100 m/s时数值模拟得到空泡充分发展后某时刻的流场结果,给出了空泡外形及压力云图。可以看出,空泡长度超过了2倍航行体长度,空泡基本为长椭球体,表面光顺,剖面形状上下基本对称。空泡内充满水蒸气,整体呈现透明状态,末端存在一定的水汽混合现象。相对于环境压力及航行体头部高压,空泡内基本压力相同,压力在饱和蒸汽压附近变化。在空泡闭合处形成了和航行体头部驻点压力量级相当的高压。
(a)空泡外形

(b)纵剖面压力云图图3 数值模拟结果Fig.3 Numerical result


图4 空泡外形与经验公式比较Fig.4 Comparison between numerical result and empirical formula in supercavity shape

表2 超空泡参数与经验公式比较Tab.2 Comparison between numerical supercavity parameters and empirical formula
3 流场计算结果

图5 尾拍过程空泡形态变化(初始俯仰转动Fig.5 Supercavity shape change during tail-slapping with rad/s
图6(a)~图6(f)分别为一个周期内航行体受力、速度和俯仰角速、位移和俯仰角的变化情况。在一个周期内,航行体向上、向下出现两次尾拍现象。在尾拍过程中,俯仰角速度剧烈变化,速度、角速度的变化均呈现方波的特征,受力呈现先陡后缓的波动特征。航行体尾部进入超空泡壁面过程中,空泡壁面与航行体相互作用力大,运动响应迅速;航行体尾部离开超空泡壁面过程中,空泡壁面与航行体相互作用力小,运动响应缓慢。因此,无论是尾拍力、尾拍力矩等均呈现先陡增后缓降的特征。
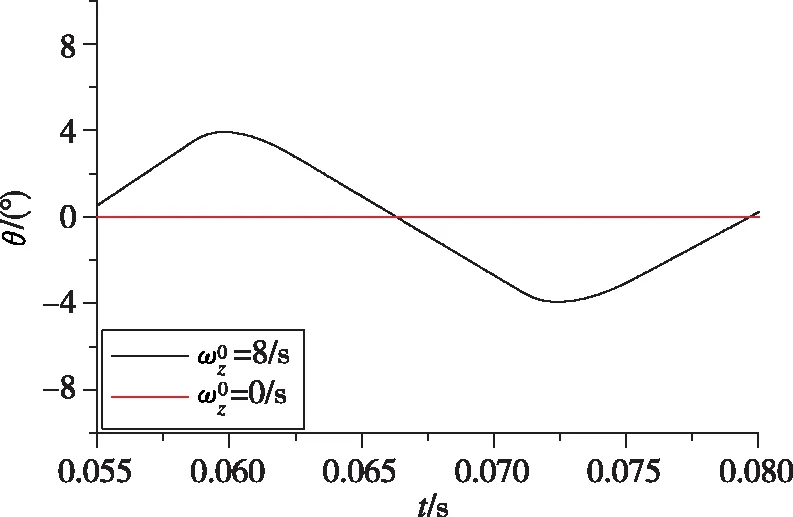
(a)俯仰角
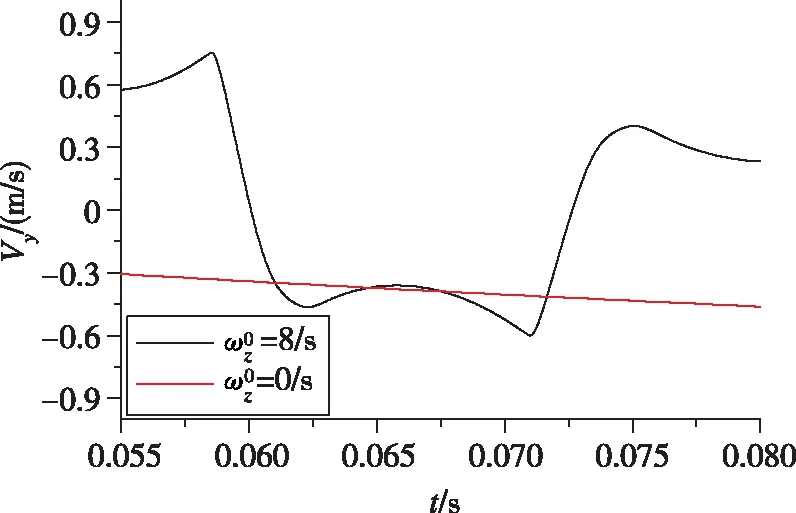
(b)垂向速度

(c)俯仰角速度
(d)阻力

(e)升力
(f)俯仰力矩
4 超空泡航行体的流体动力
假设航行体在水中以速度V在铅垂平面内运动,在航行过程中超空泡航行体受力包括:空化器所受阻力FD、升力FL,尾部所受升力RD、阻力RL。
空化器阻力和升力表达为
(1)
式中,An为空化器截面面积,CD和CL分别为阻力系数和升力系数。
在头部为圆平头时,航行体阻力系数CD取0.88,CL=CDcosθ,θ为轴线和空泡轴线之间的夹角。将头部空化器受力从合力中剔除,可以得到尾拍阻力、升力、力矩。在未发生尾拍阶段,尾拍力为0;在尾拍阶段,尾拍力大小与航行体尾部的浸没深度直接相关。本文基于航行体末端压差力及黏性力的两部分构成,构建尾拍力的公式如下
(2)
(3)
式中,lt为航行体末端距离质心的距离,ωz为俯仰角速度(尾拍运动平面内的转动角速度)。A1=λlwlθ为航行体尾部浸入液体边界层的特征面积,λ=0.5为经验常数,ξ为航行体尾部侵入液体的深度。假设航行体尾部空泡半径为Rct,则计算公式为
ξ=|Lsinθ|+d/2cosθ-Rct
(4)

(5)
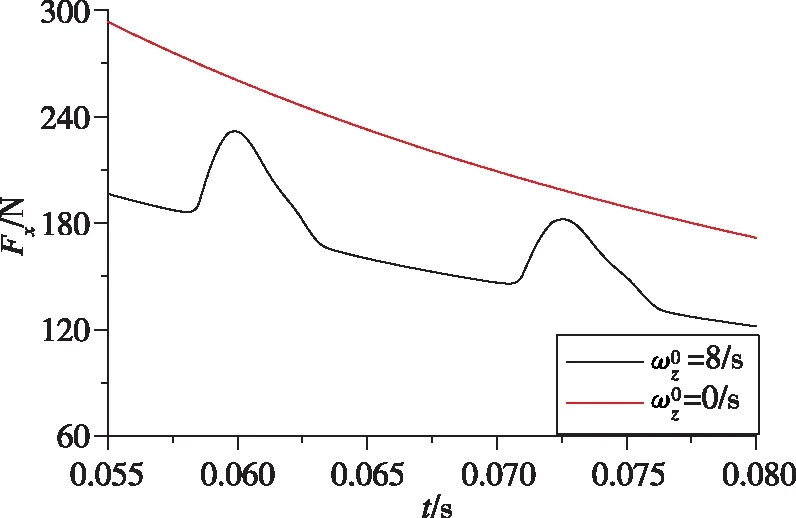
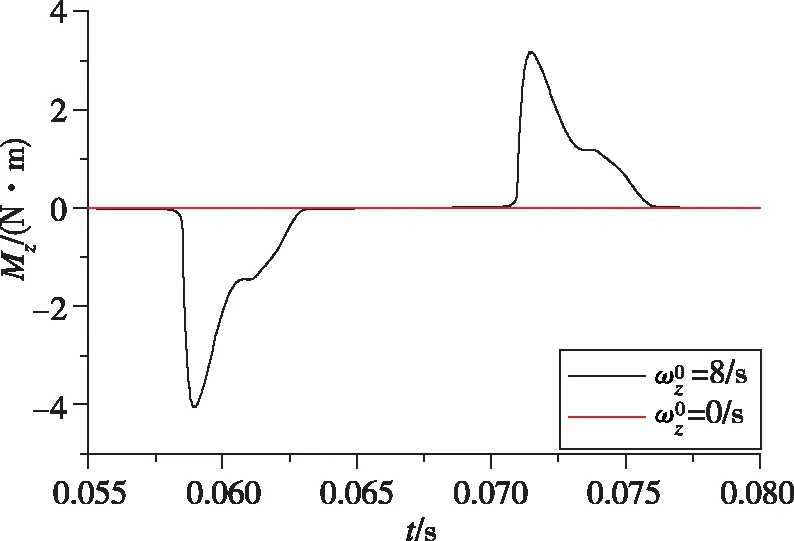
式中,μ为摩擦系数,应该为Re的函数,在本计算工况中Re数值较大,忽略μ的变化,这里取常值0.0018;C1为经验常数,这里取0.55。尾拍阻力以黏性力为主,尾拍升力以压差阻力为主。图7 为数值模拟过程中尾拍阻力和升力的结果与简化公式的比较,从数值上来看,尾部受到的升力与阻力量级相当,在同一次尾拍过程中,升力峰值要略大于阻力峰值,简化公式与数值结果之间吻合很好。

图7 尾拍力数值结果与简化模型比较Fig.7 Comparison of numerical results of tail-slapping forces with simplified model
5 结论
本文采用数值模拟方法,对航行体定常及自由航行流场进行了仿真研究。通过常速航行时空泡参数与相关经验公式的比较,验证了数值模拟方法的有效性和准确性。通过超空泡航行体自由航行过程的仿真计算,分析了尾拍流体动力的形成及演化规律。
基于对流场计算结果的总结和综合分析,给出了超空泡航行体的受力模型,并且给出其简化形式。结合相关理论分析,确定了超空泡航行体流体动力公式,流体动力与空泡壁面形状、航行速度等密切相关。尾拍流体动力正比于尾部沾湿面积。在俯仰角、浸湿深度相同时,尾拍位置的空泡面切线方向不同,引起沾湿面积的变化。相对于以往不考虑空泡面切线方向的公式,本文提出的尾拍作用力可以适用于航行体超空泡航行的整个阶段。