音叉式AFM探针针尖与表面接近特性的研究
2020-06-10高思田沈小燕
施 慧, 高思田, 黄 鹭, 沈小燕
(1.中国计量大学 计量测试工程学院, 浙江 杭州 310018; 2.中国计量科学研究院, 北京 100029)
1 引 言
原子力显微镜(atomic force microscope, AFM)是获得原子尺度物质结构信息的重要工具[1]。其中探针是检测系统的核心,其力学性能直接影响了AFM的测试性能、分辨率和扫图质量等[2,3]。传统AFM将带有针尖的悬臂作为力传感器,针尖尺度小,不适宜大台阶微观表面观测[4],且光学系统使得AFM测头结构复杂,不易集成[5]。石英音叉因其谐振频率高,双臂弹性系数大,具有较高品质因子[6]而被广泛地应用于微纳米级检测中[7],因此研究其动态力传感测量机理对实际测量具有重要参考意义。文献[7]引入平衡点作为引力斥力的分界线,探讨经历各个作用区时悬臂探针的振荡状态; 王艳霞等通过实验获得了探针的振幅随探针-样品间距变化的关系曲线[8]; 2000年,Schmidt等建立音叉的有限元模型,细致探究了音叉探针动态力学特性[9]; 2014年,薄惠丰等研究了典型针尖悬臂系统对不同力学性能的材料样品在接近过程中的响应情况[10];2016年,李喜德等研究了音叉探针与样品之间的剪切相互作用机制,获得音叉探针在横向作用力下的接近曲线[11]。
本文基于文献[12]提出的三弹簧两质点模型,建立并简化了由石英音叉和钨针尖构成的探针在垂直于样品表面振动时受到样品表面作用的动力学模型,对音叉探针与试样表面的相互作用进行了理论分析,模拟针尖样品接近曲线,搭建基于音叉探针的针尖样品接近曲线测量装置,进行实验研究,获得不同激励下的接近曲线,为之后研究音叉式原子力显微镜系统提供重要的数据支持。
2 基于Simulink的动力学分析
基于音叉探针动力学特性和阻尼特性分析,建立其理想条件下的动力学方程,假设:1) 音叉臂的等效质量均匀分布; 2) 填充基座和音叉基部的形变相对音叉臂形变可忽略,模型中将其简化为固定端; 3) 音叉臂对沿驱动轴方向的运动为弹性运动,其它方向的运动为刚性运动; 4) 系统阻尼为线性阻尼,且只与等效质量块的速度有关。
基于假设,音叉探针受到激励力和针尖样品作用力后的运动方程可以表示为:
(1)

由于音叉与样品表面之间的作用力是和它们的间距相关的,而间距与音叉的位移有直接关系,所以作用力及振幅都是关于音叉位移的函数。音叉臂的等效阻尼为:
(2)

音叉单臂的等效弹性系数为:
(3)
式中:W,T和L分别为音叉单臂的宽、厚和长;E为石英的杨氏模量。
(4)
为了研究音叉和针尖组成的复杂系统,在针尖远离平衡位置时,将针尖和样品之间的相互作用力表示为范德华力:
(5)
式中:A为Hamaker常数。接触斥力部分采用DMT模型描述,该模型适合曲率半径R小、粘附能低、弹性模量高的体系。其表达式为:
(6)
式中:a0为平衡距离,当z>a0,针尖受到范德华力作用,当z≤a0,斥力起作用。EI为针尖和样品的等效刚度,其表达式为:
(7)
式中:Et,νt和Es,νs分别为针尖和样品的杨氏模量和泊松比。在模拟中设定Hamaker常数为 3.8×10-19J。 模拟样品为硅样品,其弹性模量为190 GPa,泊松比为0.2。针尖半径为20 nm,针尖杨氏模量为344 GPa,泊松比为0.28。探针的反相共振频率为27 kHz,同相共振频率为25 kHz,品质因数为 1 700, 设定平衡距离为0.2 nm。
采用Simulink对微分方程进行数值仿真仿真参数是结合实际的假定参数,得到力距离曲线如图1所示,范德华力和DMT接触力是连续的。

图1 针尖样品力与平衡距离关系图Fig.1 Relationship between tip sample force and equilibrium distance
为了能直观观察音叉臂的连续运动过程,在一定时间内多次计算其振荡状态。对于音叉本身,当外部激励信号频率与音叉共振频率一致时,音叉振幅逐渐增大至稳定,音叉位移波动式前进。设置激励分别为3,5和7 nN,在远离样品表面时,振荡幅值为1.394,2.323和3.252 nm。不断改变使针尖接近样品表面,探针保持简谐运动,针尖接近样品表面时的振荡幅值变化见图2所示。

图2 Simulink仿真不同激励力的接近曲线Fig.2 Simulation of approach curves under different exciting force by Simulink
由图2可知,随着激励的增大接近曲线中下降部分距离增大,探针在部分区域内存在存在幅值跳变。
图3是针尖只受到范德华力作用时其受力曲线及位移曲线,该位移是探针相对于样品表面的位移,此时音叉保持简谐运动,振荡幅值减小。

图3 引力作用下探针位移及受力图Fig.3 Diagram of probe’s displacement and stress under the attraction
当探针的部分位移进入平衡距离内,如图4所示,受到引力和斥力的共同作用,由于斥力较大,探针整体振幅下降明显,不同于普通悬臂探针,音叉探针弹性模量较大,其振动形式保持不变,但波谷值小于波峰值,这是由于探针处于波谷时距样品表面距离更接近,受力更大。

图4 引力及斥力作用下探针位移与受力图Fig.4 Diagram of probe’s displacement and stress under the attraction and repulsion
由于在振幅调制AFM中,针尖-表面间相互作用力与其间距呈非线性关系,音叉探针有意义的振幅往往大于相关的短程力和范德华力的衰减长度。探针在接近样品表面的过程中,存在着吸引力到斥力的转变,探针的平均作用力减小,振荡幅值增大。
3 音叉式AFM力曲线测试装置
图5为接近曲线测试装置,主要由光学辅助进针模块、定位台、信号转换电路及锁相模块组成。光学辅助进针系统主要包括CCD摄像机、光源、物镜以及图像采集卡组成。CCD选用大恒图像的DH-SV1421GC/GM型工业数字相机,分辨力为140万像素,CCD尺寸为4.65 μm×4.65 μm,物镜采用可变焦Narvitar 12× Zoom型工业镜头,分辨力为0.83 μm,放大倍率可调,有助于安全进针。

图5 音叉式原子力显微镜力曲线测试装置示意图Fig.5 Diagram of force curve testing device of tuning fork atomic force microscope
定位台分为宏动和微动部分,宏动主要由X,Y方向运动的Thorlabs XYT-1手动位移台以及Z方向运动的M-714纳米精度线性平移台。XYT-1的行程为13 mm,分辨力为10 μm。M-714行程为7 mm,分辨力为2 nm,配合C-702混合驱动运动控制器使用,采用RS232通讯,将探针系统固定于该位移台上,实现探针进针时的粗定位。微动部分采用PI公司的P-733.3CL三维纳米位移台,X和Y方向行程为100 μm,闭环控制时分辨力为0.3 nm,Z方向行程为10 μm,闭环控制时分辨力为0.2 nm,配合E-500控制器使用,采用USB通讯,实现探针与样品表面的精细逼近。
信号转换电路主要包括前置缩小、寄生电容补偿、I/V转换及二级放大4个部分,锁相放大器输出激励信号源,由于激励源与传感器距离较远,需用前置缩小电路对励振信号处理并缩小激励幅值,设计缩小比例为10:1。寄生电容补偿电路由放大器和电容串联,并并联在传感器两端,实验选用1 pF电容,调节放大器放大倍数匹配石英音叉的寄生电容,提高幅频曲线的对称性。探针受到外部电信号激励振荡,产生nA级别的电流信号,选用集成运算放大器OPA627搭建深度负反馈电路提取微弱信号,选用22 MΩ反馈电阻。采用二级放大使电压正向输出,并进一步调节输出电压幅值,以配合锁相输入电压。
采用锁相放大器对信号进行提取和调制,锁相采用的是苏黎世公司生产的HF2LI。该锁相放大器内置信号发生器、解调器、PLL模块、PID控制及DA辅助输出,锁相放大器通过USB接口与PC相连,通过上位机软件Labone控制。同时该设备的调制信号可通过辅助端口以模拟量形式输出,采用研华PCI1714UL采集卡采集至计算机。
4 仿真测试实验
石英音叉测头如图6所示,是由去掉外壳的石英音叉和化学研磨后的钨丝相结合。选用钨丝直径为150 μm,浸没在1.5 mol/L的NaOH溶液中,在扫描电子显微镜(SEM)下观察腐蚀得到的针尖,其曲率半径可以控制在20 nm内,如图7所示。

图6 音叉测头图及针尖SEM尺寸图Fig.6 Picture of tuning fork probe and diagram of tip'dimension under SEM

图7 钨针尖SEM尺寸图Fig.7 Dimension of tungsten tip under SEM
商用石英音叉密封于铝制外壳内,处于真空下的共振频率为32.768 kHz,品质因数高达105,拆除外壳后,测得该石英音叉在空气中的共振频率为32.730 kHz,品质因数下降为8 000。使用奥林巴斯MX51显微镜测量其尺寸参数,测得其长、宽、厚分别为5.01,0.35,0.59 mm。石英音叉和探针之间的连接选用3MDP460环氧树脂胶水。
将粘针后的音叉进行扫频实验,粘针后音叉的共振频率及品质因数下降,在温度为25 ℃,湿度14%的实验室环境下,测得其共振频率为28.009 kHz,品质因数为600,相频曲线呈阶梯状,不呈单调变化。调节补偿电容后,其幅频及相频曲线如图8所示,幅频曲线关于共振频率基本对称其共振频率为28.00 kHz,相频曲线呈单调变化,品质因子为1 810。
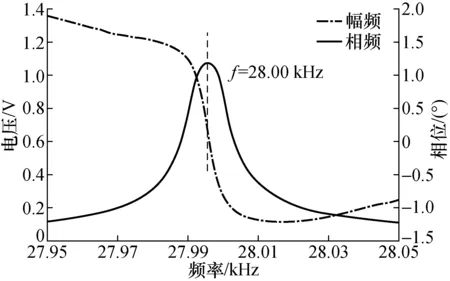
图8 补偿电容后音叉探针的幅频相频图Fig.8 Pictures of amplitude frequency and phase frequency of tuning fork probe by applying capacitance compensation
音叉探针测头的噪声直接影响AFM的性能,噪声主要来自信号转换电路产生的噪声以及锁相放大器产生的噪声。对探针的输出信号采用四阶低通滤波,在调幅模式下,采集测头谐振信号的有效值,如图9所示,测得信号的标准差大约为0.4 mV,滤波后信噪比较高。
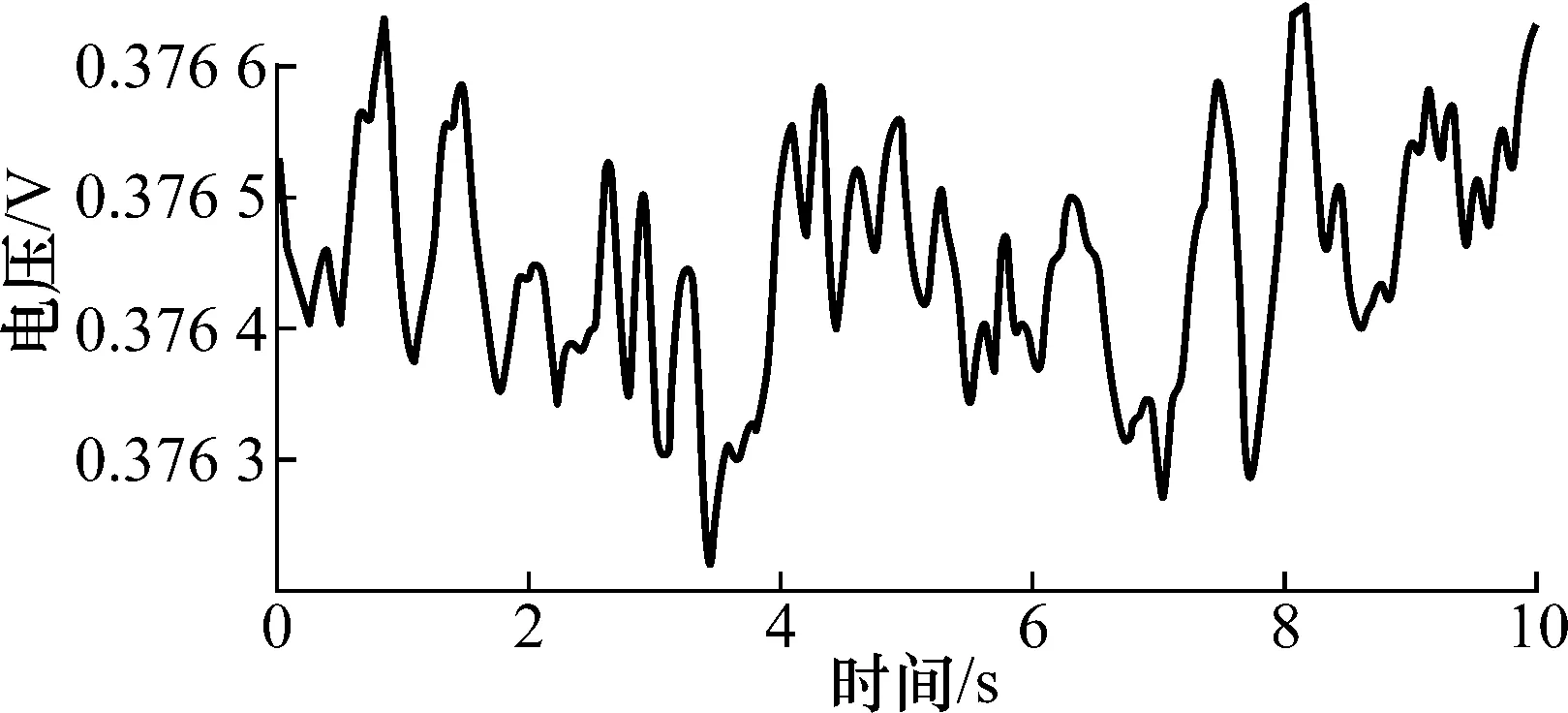
图9 电压激励下音叉谐振信号有效值Fig.9 Effective value of tuning fork's resonance signal under voltage excitation
实验所采用的样品是在真空状态下保存的云母片,利用装置的宏动部分使音叉探针进入显微镜视野范围,并使针尖逐步逼近样品表面,利用E-500控制器驱动纳米位移台P-733.3CL沿测头运动方向运动,采用C++编程控制位移台移动步长及速率,实时采集纳米位移台的当前位移,同时采集测头输出信号,直至样品和针尖间歇性接触。
音叉探针工作在调幅模式下,设置激励信号幅分别为25,50,75,100 mV。驱动频率设置为音叉探针固有频率。测得其自由振荡时电压有效值分别为0.31,0.61,0.93,1.24 V。激励信号幅值大小和探针输出信号成正比。由图10可见,探针接近样品时接近曲线的形状与仿真图形相符,不同激励下工作距离分别为4.12,5.10,5.95,7.60 nm。可见调幅模式下,激励越大,工作距离越大,这与仿真结论相符。不同激励下在下降曲线内都出现了非线性跳变区域,该结果表明力区的变化对轻敲式AFM的测量影响较大,调幅AFM在该区域内有严重的不稳定性,选择工作区间时应尽可能远离该区域。

图10 不同激励电压下探针样品接近曲线Fig.10 Probe and sample's approach curve under different excitation voltage
5 结 论
本文对调幅模式原子力显微镜(AM-AFM)的音叉式探针与样品的接近特性进行了研究,搭建了相应测试系统,采用C++编写系统控制程序。得到了不同激励下探针与样品的接近曲线。同时本文将音叉探针结构简化为带耦合的悬臂梁模型,选取该系统的一阶弯曲振型,建立其在纵向受力时的振动方程,运用Simulink仿真音叉动态模式时在逐渐接近样品表面时其幅值变化的数值结果,分析了其动力学行为产生的原因。仿真结果和实验结果有较好的一致性,但是探针在实际工作中环境和受力情况更为复杂,例如空气流场的阻尼随时间变化,因此,阻尼系数难以给定,在接近样品表面时有毛细管力的作用等,对仿真的精确性存在影响。本文的仿真和实验结果对搭建音叉式原子力显微系统意义重大,首先验证了机械结构设计合理,能满足实验需求,其次提供扫描基准的数值参考,有利于反馈控制系统的设计。
