卫星时间窗口计算的动态步长快速算法*
2020-06-09汪荣峰
汪荣峰
(航天工程大学 北京 101416)
1 引言
在卫星任务规划[1]、数传资源调度[2]、天基目标监视[3]等各种任务中,均需时间窗口计算功能的支持。参与计算双方可为卫星与地面目标,也可为2空间对象,计算双方需满足相应的形状、距离、角度等约束条件。
时间窗口计算的传统方法是对卫星轨道连续跟踪采样,逐次判断各采样点处卫星与目标的位置关系。该方法实现简单、计算结果精确、同时适用于轨道预推的数值模型和解析模型、可支持各类时间窗口计算,但计算量大、效率低。
唐荣富等[4]提出变轨交圆补偿的快速算法,但计算结果存在误差且只针对圆轨道,也未考虑载荷和地面目标的形状特征;文献[5]提出轨道过滤的方法大幅减少计算量;文献[6]提出利用同轨道周期大圆对卫星星下点轨迹进行近似然后迭代计算的快速方法,但算法只能针对点目标且精度较低;李冬等[7~8]分别研究了星地和星间的时间窗口快速计算算法,其思路与文献[6]较接近,虽考虑了J2摄动的影响,但建立控制方程时并未考虑岁差、章动与极移,误差不可避免且计算双方均为点目标;沈欣等[9]将成像条件方程改写为关于偏近点角的超越方程以快速计算光学遥感卫星的成像时间窗口;文献[10~11]研究了卫星与地面区域目标可见性的快速计算方法,其中文献[11]还考虑了载荷形状影响。上述算法均从几何角度进行分析,对卫星运动规律做了一定程度的简化,直接计算时间窗口必然存在误差;如作为初步筛选结果,对卫星数值预推模型并不能减少采样点计算次数,只适于解析模型。与上述算法略有区别的是文献[12],提出的快速算法并不单纯考虑几何条件,而是研究了摄动和大气阻力对时间窗口的影响来进行求解,精确性更高,该算法轨道预推采用SGP4 解析模型。汪荣峰[13]提出了两次扫描的时间窗口快速计算算法,通过扩大待判断区域范围进行初步筛选再进行精确判断求解,该方法适于各类时间窗口计算,但也仅支持卫星轨道预推解析模型。
影响传统算法效率的原因是需计算的采样点数量过多。本文通过预测参与计算2 对象的距离动态确定采样步长,大幅减少卫星采样点数量以提高效率;同时具有较强的通用性,可用于解决各类时间窗口计算问题。
2 新算法原理
以地面点目标探测时间窗口计算为例说明新算法。
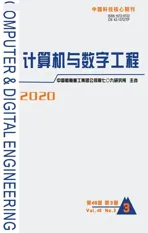
首先定义“广义可视”概念(以下简称“可视”),表示参与计算2 对象之间位置关系满足要求(由于有些类型时间窗口并非依据2 对象几何可见,如卫星对地面目标的覆盖时间窗口,因此称为“广义可视”)。如图1(a)所示,探测范围抽象为圆锥形状,点目标O,圆锥半角为α,圆锥指向的方向矢量为OV,“可视”判断方法为构造地面点O 到卫星位置的矢量v;矢量v与矢量OV 单位化后计算数量积μ,如μ<0,不满足“可视”条件;如μ>0,计算其反余弦得到2矢量夹角β,如β<α,满足“可视”条件。
定义“预测距离”概念,表示参与计算2 对象之间的近似距离。卫星按轨道运动到探测范围边界的精确距离计算相对复杂,采用“预测距离”近似表示。“预测距离”按如下三条原则确定:1)小于实际轨道距离,否则会导致计算得到的时间窗口不精确;2)尽量偏大以加快采样点逼近边界的速度;3)模型简单,便于计算,效率高。
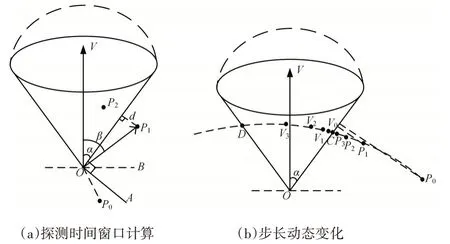
图1 新算法原理
卫星位置P,构造矢量OP,“预测距离”为

式中,根据卫星位置分为两种情况:第一种情况是地面点O到卫星方向矢量与圆锥边界夹角小于90°(β<90°),如图1(a)中P1、P2,以卫星到圆锥侧面的垂直距离作为“预测距离”,如图1(a)中d 所示;第二种情况是前述夹角大于90°,如图中点P0,以卫星到地面点的距离作为“预测距离”,即图1(a)中矢量OP0的长度。
基于“可视”和“预测距离”概念,算法伪代码描述为

对算法执行情况进行分析。如图1(b)所示,P0为计算开始时刻采样点,根据该采样点的“预测距离”计算步长,得到下一采样点P1,如此不断迭代,距探测范围越近步长越小,根据设定精度(1s),计算到满足“可视”条件的采样点C;然后步长开始逐渐增大,采样点为 V0、V1、V2、V3,此时步长又开始减少,直到边界采样点D;然后步长又进入增大过程,如此不断进行,直至计算结束。
本节“可视”判定方法和“预测距离”计算模型可用于解决卫星与地面点目标可见时间窗口计算这一类问题,如星地链路时间窗口等。
3 算例与效率分析
选择两颗卫星(SGP4 模型,2 行轨道根数略),地面点(120°E、44°N),计算2018-3-1 8:0:0 开始24h 之内的时间窗口。分别实现传统算法(逐采样点计算)、两次扫描算法[13]和本文算法,本文算法分别以“预测距离”的一半除以卫星最大速度(表1 中“实现1”)和“预测距离”除以卫星最大速度(表1中“实现2”)作为步长。四种算法得到的时间窗口完全一致,卫星1有两个时间窗口,卫星2有三个时间窗口。各算法计算所需的采样点数、耗时等如表1所示。
对数据进行分析,有如下结论:1)本文算法和两次扫描算法得到的时间窗口与传统算法完全一致,较之于其他近似算法,计算精度高;2)算法耗时与参与计算的采样点数成正比;3)本文算法比传统算法效率提升约99.7%。
定性分析效率影响因素:1)时间窗口个数,由于时间窗口范围内采样步长相对较小,故时间窗口个数越少耗时越少;2)时间窗口计算类型,不同时间窗口计算类型可供选择的预测距离不同,影响效率;3)卫星轨道参数、载荷类型、地面目标等因素,通过时间窗口个数和“预测距离”与轨道距离的接近程度间接影响效率。
下面分析步长动态变化情况。如图2 所示,水平方向为采样次数,垂直轴为每次采样对应步长(秒数)。
图2(a)为卫星1 算法实现2 对应步长变化情况,每个波形对应一个轨道周期。最大步长1703s,最小步长1s,平均每个轨道周期约需计算18 个采样点,大多轨道周期计算采样点不到10 个,甚至只有6、7个。
图2(a)中A、B、C 区域对应波形变化相对平缓且步长值很小。A 区域并非时间窗口,而是卫星接近但未进入探测范围,该部分图形放大后如图2(b)所示,最小步长3s,根据算法原理,步长1s 时才表示卫星进入探测范围。B、C 区域对应时间窗口,B区域图形放大后如图2(d)所示,步长减小到1s后进入探测范围,然后步长增加,最大增加到63s,然后再次减小。
图2(a)中D、E、F、G 等处波形对应的轨道周期与探测范围相距较远,采样点数较少。
图2(c)为卫星1 算法实现1 对应步长变化情况,与图2(a)波形相比,步长值减少、采样点数增加,其中A1、B1、C1区域对应图2(a)的A、B、C区域。
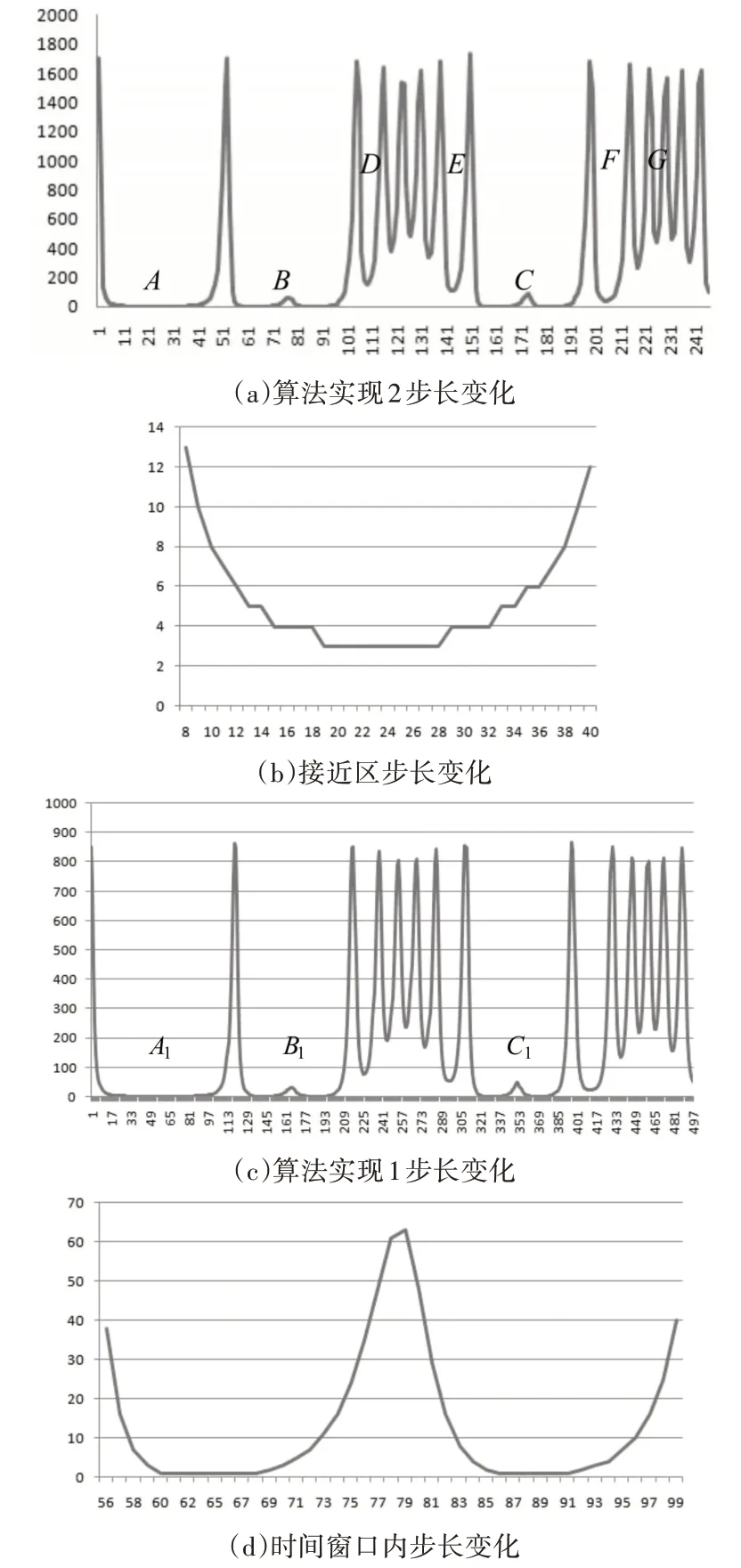
图2 采样步长动态变化情况
关于卫星运行过程中与地面目标之间距离、角度的变化情况,文献[14]也进行了详细讨论。
4 其他类型时间窗口计算的判断方法与计算模型
通过构造“可视”判断方法和“预测距离”计算模型,算法适于各类时间窗口计算。
4.1 星间可见时间窗口计算
参与计算的双方可为航天器、空间碎片等。该模型可用于星间通信中继链路、天基空间目标监视、天基测控等的时间窗口计算。
星间“可视”的条件是二者不被地球遮挡且均位于对方载荷作用范围之内。
图3 星间可见时间窗口计算
如图3 所示,目标位于 A、B 位置,地球球心 O,构造矢量AB、AO,矢量AB 单位化后为V0,过点O到线段AB的垂点M(位置矢量)为

计算垂点经纬度和高程。如高程小于0(如图中d所示),2目标被地球遮挡,不“可视”;如高程大于0(如图3中所示),不被地球遮挡。
采用圆球形状表示卫星载荷的作用范围(半径可无穷大),如图3 所示,C、D 半径分别为r(1无穷大)、r2,此时“可视”需|CD|≤ min(r1,r2)。
如2 对象被遮挡,如图3A、B,以球心到对象连线垂点高程(图3中d)为“预测距离”。
如2 对象不被遮挡,如图3C、D,需区分情况计算“预测距离”:如2 对象作用半径均为无穷大,以垂点高程作为“预测距离”(图3 中 l);如 1 或 2 对象作用半径有限,以式(3)计算。

其中,l 为垂点高程,m 为 2 对象连线长度,r1、r2为 2对象作用半径。
4.2 卫星对地面点目标覆盖时间窗口计算
卫星对地面目标的覆盖时间窗口计算,可用于卫星侦察、遥感、气象监测等任务。
根据载荷将卫星作用范围抽象为不同的空间形状,文献[15]研究了简单圆锥、复杂圆锥、半功率点、SAR等传感器形状的离散表示方法。
针对圆锥(电子探测载荷、通信中继载荷)和四棱锥(成像载荷)形状,研究计算模型。
4.2.1 圆锥形传感器作用范围
如图4(a)所示,“可视”判断方法为计算卫星到点目标矢量与卫星传感器指向的夹角(图4(a)中β);如夹角大于卫星传感器半角(图4(a)中α),不“可视”;如夹角小于传感器半角,计算卫星与目标距离,如距离小于阈值(根据轨道高度、半角等计算,避免地面目标位于地球背面的情况),满足“可视”条件。
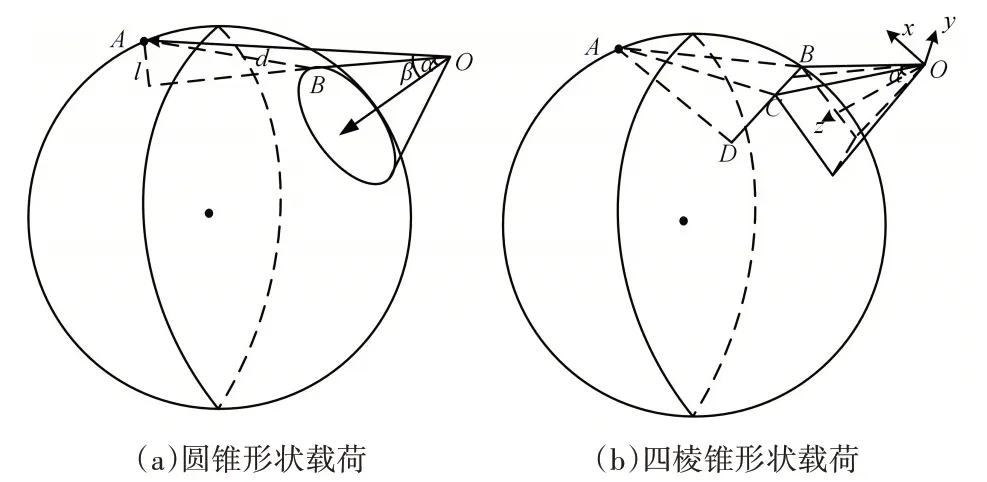
图4 卫星对地面目标覆盖时间窗口计算
“预测距离”为
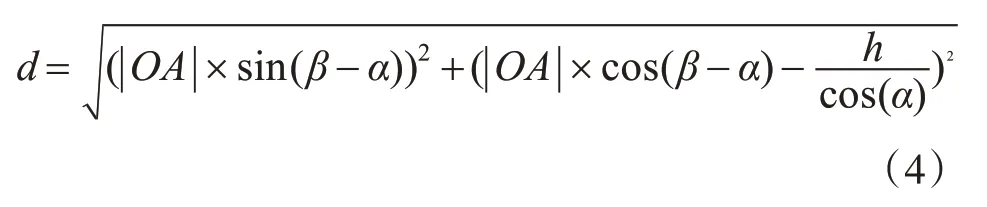
其中,α为圆锥半角,β为卫星到点目标矢量与卫星传感器指向的夹角,h 为卫星高度,得到的d 如图4(a)所示。
4.2.2 四棱锥形传感器作用范围
如图4(b)所示,“可视”判断方法为以卫星位置为原点,卫星速度方向为x 轴、卫星到地心方向为z轴建立右手直角坐标系;将地面点目标位置(点A)变换到卫星局部坐标系中,计算其在xz、yz 平面上与z轴的夹角;如2夹角小于对应的四棱锥角度,通过距离判断是否“可视”(避免目标位于地球背面情况)。
“预测距离”通过计算地面点目标到四棱锥四个锥面的最小距离确定。点目标到每个锥面最小距离的计算算法为根据四棱锥的锥角及卫星高度,计算锥面三角形另两个顶点(矢量加法确定射线方向,然后计算射线与地球表面交点),如图4(b)B、C点;计算地面点到B、C 的距离和到直线BC 的垂线距离(图4 点D 为垂点),以三者中最小值作为点A到OBC平面的最小距离。
4.3 大范围地面区域过境时间窗口计算
采用多个点表示地面区域,如图5 中区域ABCDE。这种方式适于与地理信息结合,计算诸如行政区划等的过境时间窗口。
描述地面区域的每2 点与球心构造平面三角形,形成以球心为中心的复杂锥体形状(如图5 中OABCDE 所示)。计算各平面法向(指向锥体内部且单位化),如图5平面OBC的法线为N0。

图5 大范围地面区域过境时间窗口计算
“可视”的判断条件为卫星位于锥体内部,判断方法为构造地心O 到卫星位置的矢量OP;计算矢量OP 与各平面单位法矢量的数量积,如数量积大于0,表示卫星位于平面正向一侧;如卫星位于所有平面正侧,则其位于锥体内部,满足“可视”条件。
“预测距离”的计算方法为:计算卫星位置到锥体各平面的距离,采用方法仍是计算矢量OP 与平面单位法矢量的数量积,以该值作为卫星到平面距离,如图5 中d 所示;以所有距离中的最小值(绝对值最小)作为“预测距离”。
5 结语
与传统算法相比,本文算法效率上有显著提升、精度上完全一致。现有其他各算法多以传统算法作对照来分析效率和精度,基于相应文献中给出的实验结果,将本文算法与其他算法进行简要对比分析:1)效率与其他大部分算法持平、优于某些算法,多数算法的效率优化程度与本文算法处于相同量级,耗时在传统算法的1/100~1/400 之间,少数算法效率略低、耗时多一个数量级;2)精度优于多数算法,本文算法与传统算法相比不损失任何精度,其他算法多对卫星运动模型、轨道形状等做了简化,与传统算法相比存在一定误差;3)相比其他算法,原理简单、更易于实现;4)通用性优于其他算法,本文算法适于各类时间窗口计算,其他算法往往解决某一类计算问题;5)卫星轨道预推模型的适应性上劣于部分算法,本文算法只适于解析模型,不能用于数值模型,其他有些算法在简化模型、容许误差的前提下并不依赖轨道预推过程。