冲击波测试仪姿态测量系统研究
2020-06-07张超颖丁永红裴东兴尤文斌张钰龙
张超颖,丁永红,裴东兴,尤文斌,张钰龙
(中北大学 a.电子测试技术重点实验室; b.电气与控制工程学院,太原 030051)
冲击波作为评估战斗部毁伤威力的重要技术指标,其参数的准确性直接影响战斗部毁伤威力的评估精度[1]。在实战环境测试中,随着舱壁或墙壁的倒塌,装置会发生姿态的改变,流场会产生影响,反射波的叠加导致获取的冲击波超压数据不准确,从而不能精确地评估炸药毁伤威力。在建筑物或船舱内,由于壁面结构的约束,爆炸冲击波与壁面结构的耦合效应显著,产生的反射冲击波在壁面间来回反射,形成了比开放环境下更加复杂的压力波流场。
常见的姿态数据采集系统常采用捷联式惯导系统(SINS)、平台式惯导系统等,这些姿态数据采集系统不可避免的都具有相对较大的体积、更大的重量,操作复杂程度高等特点,而且价格昂贵,体积较大[2],使得传统的姿态数据采集系统无法搭载在被测装置上,本文针对此问题,提出采用基于MPU9250传感器,以SAM D21G ARM作为控制器的小体积,易搭载的姿态测量系统来采集由于舱壁或墙壁的倒塌或形变,装置产生的姿态运动数据,并利用卡尔曼滤波器进行数据融合,改善传统数据融合方法的局限性、信息损失量大、融合精度低等缺点。
1 姿态对冲击波测试影响的研究现状
目前,关于自由场静爆冲击波超压的测试已有较完善的评价系统,而受限空间中冲击波测试与自由场差别较大,主要体现在受限空间内冲击波各种反射错综复杂、无法确定冲击波来源方向,故采用掠入式测试毫无意义,只能将冲击波测试仪安装在壁面进行测试。冲击波在楼宇、舱室、厂房或战舰等受限空间环境中传播时会使得墙体发生坍塌,引起测试仪运动及姿态变化,虽然也开展了受限空间内爆炸冲击波传播规律的研究,但大多停留在数值模拟阶段,更未考虑到造成测点数据失真的原因中也包含了大量来自环境、测试仪运动姿态的干扰。2013年,丁永红等[3]运用加速度计和单片机,通过利用加速度计的方向检测功能,设计了一种在恶劣环境下进行角度检测的姿态测量装置;2015年,柏小娜等[4]建立了封闭空间内爆炸的冲击波超压计算模型,研究表明:建立的内爆炸冲击波超压的计算模型能快速计算封闭空间内任意位置处的压力载荷,且装药在封闭空间内爆炸超压时程曲线呈现多峰性。2018年,王梓昂等[5]研究了冲击波在圆筒装置内的传播规律,发现结构壁面任意点处的内爆炸载荷由爆炸冲击波对测点的直接作用和经反射后的冲击波对测点的作用共同组成。
综上所述,测试仪在受限空间中的不同姿态必然会影响测试数据。学者们仅对不同受限空间中冲击波传播规律进行了数值模拟研究,并未考虑测试仪的运动姿态对冲击波测试的影响,且姿态测量系统并未应用在冲击波测试仪上。本文提出了利用MPU9250传感器和ARM控制器设计冲击波测试仪的姿态测量系统,通过触发信号的统一,使姿态测量系统能够实时记录爆炸后冲击波测试仪产生的姿态运动。
2 测姿系统设计与算法融合
2.1 系统的总体设计
基于ARM控制器的测姿系统以地面为基本坐标系,通过传感器得到运动物体的加速度数据、陀螺仪数据和磁力计数据。加速度数据首先对时间积分得到速度信息,再进行一次积分获得位置信息,主要测量物体在x、y、z三个方向的受力情况;当运动物体进行旋转时,陀螺仪就会获取到物体的角速度,从而判断出物体的运动状态[8-10];磁力计主要利用测量获取到的磁场强度和方向,定位物体的方位。综合三者优势进行姿态角融合、内部补偿,弥补了单个传感器在计算精确位置和方向时的不足。
冲击波测试装置的姿态测量系统是基于SAM D21G ARM为核心控制器,通过传感器MPU9250分别采集加速度计、陀螺仪和磁力计的数据,利用四元数描述刚体的姿态运动过程,采用卡尔曼滤波器对数据进行融合,通过I2C总线与ARM控制器进行数据传输并实时存储,处理后的姿态数据可通过USB在上位机软件上实时显示。这样可以在实现姿态数据采集的同时可尽可能地提高精度和抗干扰能力。系统结构如图1所示。

图1 系统结构
MPU9250为全球首例整合9轴运动姿态检测的数字传感器[6-7],它将MPU6500的3轴加速度计,3轴陀螺仪和AK8963的3轴磁力计整合在一起,解决了多种传感器组合封装之间的轴间差问题,缩小了传感器的体积,并随之降低了系统的功耗。MPU9250的加速度计、陀螺仪和磁力计分别用了3个16位的ADC,通过传输速率为400 kHz/s的I2C总线将转化的数字量传输给ARM控制器。为了精确跟踪装置在受到冲击波的压力作用下的快速和慢速运动,传感器具有可编程更改传感器满量程范围的功能,加速度计的可更改范围为±2g、±4g、±8g、±16g,陀螺仪的可更改范围为±250、±500、±1 000、±2 000 (°)/s(dps),磁力计采用一种高灵敏度霍尔型传感器进行数据采集,满量程磁感应强度范围为±4 800 μT。
2.2 数据处理
冲击波测试装置姿态测量系统的数据处理算法是该系统的核心,会对姿态角的精度产生直接的影响[7]。综合利弊,本系统选用四元数法来描述姿态的运动过程,并采用卡尔曼滤波器进行数据融合。
2.2.1角度解算
在研究受限空间内爆炸冲击波毁伤威力试验中,适合使用过载加速度计[9],所以通过可编程更改加速度计的量程为±16g,所对应的灵敏度为2 048 LSB/g;陀螺仪的量程越大则动态响应特性越好,所以选择陀螺仪的量程为±2 000 (°)/s(dps),所对应的灵敏度为16.4 LSB/( (°)/s),磁力计所测磁感应强度范围为±4 800 μT,可用于对偏航角的辅助测量,所对应的灵敏度为0.6 μT/LSB。
四元数通过4个参数来完成对姿态的描述,即3个旋转轴单位矢量的坐标分量以及相对于某个坐标系的旋转角度。一般定义姿态四元数为[10]
q=q0+q1i+q2j+q3k
(1)
式中:q0,q1,q2,q3为实数;i、j、k是互相正交的单位向量,满足i2=j2=k2=-1;假设,旋转轴的3个坐标分量分别为l、m、n,则有
(2)
四元数可确定出A系至B系的坐标变换矩阵,如式(3)[12]; 利用规范化四元数,即式(4)得出可描述刚体旋转的四元数矩阵为式(5)。
(3)
(4)
(5)
假设俯仰角为γ,横滚角为λ,偏航角为ψ,可得到姿态矩阵,如下:
(6)
由姿态矩阵式(6),可求得姿态角如下[13]:
(7)
如图2所示,假设坐标系A为地面坐标系,坐标系B为装置坐标系,坐标系B可由坐标系A绕r轴旋转θ得到。

图2 坐标系
2.2.2卡尔曼滤波
在姿态角度融合中,常见的处理算法有互补滤波和卡尔曼滤波,相比于卡尔曼滤波,从滤波效果来看,互补滤波的动态融合精度低,相应速度较慢[8]。因此,该系统采用卡尔曼滤波算法对姿态角度数据进行融合。这里采用文献[6]中的卡尔曼滤波器,公式如下:
(8)
其中:xk为状态向量;yk为观测向量;A为从k-1时刻到k时刻的状态转移矩阵;Uk为系统输入控制向量;B为输入控制向量的增益矩阵;H为状态量到观测量的增益矩阵;ωk为输入噪声;νk为测量噪声。若其噪声都服从正态分布,输入噪声的协方差为Q,测量噪声的协方差为R,则其5个核心公式如下:
状态量的预估计:
(9)
误差协方差预估计:
Pk|k-1=APk-1AΤ+Q
(10)
卡尔曼增益:

(11)
现状态估计:
(12)
误差协方差:
Pk=(Ι-KkH)Pk|k-1
(13)

R和Q的取值会影响滤波的效果和响应速度:R取值越小,响应越快,收敛越迅速;Q值越小,抑制噪声的能力越强,但收敛和响应变慢,需将各项系数进行优化。
3 实验与分析
本实验利用实验室的角度分度装置,分别设置了静止状态下0°和45°两个测试位置以及运动状态下的随机位置,将系统采集到的数据在Matlab中进行数据处理,实现卡尔曼滤波,并进行对比与分析。
图3中的(a)图和(b)图分别是装置在静止状态下的0°位置和45°位置提取出的俯仰角的测量结果,其中,曲线1为角度装置测量值;曲线2为系统测量值;曲线3为卡尔曼滤波结果。表1和表2分别为测试仪在静止状态下0°和45°各抽取的5个点的数据,将角度测量装置所测到的值视为真实值,分别与系统测量结果和卡尔曼滤波结果进行比较,得出最大误差。如表1所示,在0°位置,可以看出系统测量与角度装置测量误差最大达±0.35°,经过卡尔曼滤波后,二者之间最大误差降低为±0.183°,可见精度得到了一定的提升;如表2所示,在45°位置,通过卡尔曼滤波,最大误差由0.43°降为0.21°,同样提升了测量精度。

图3 静止状态下俯仰角的测量结果

表1 静止在0°位置的俯仰角数据
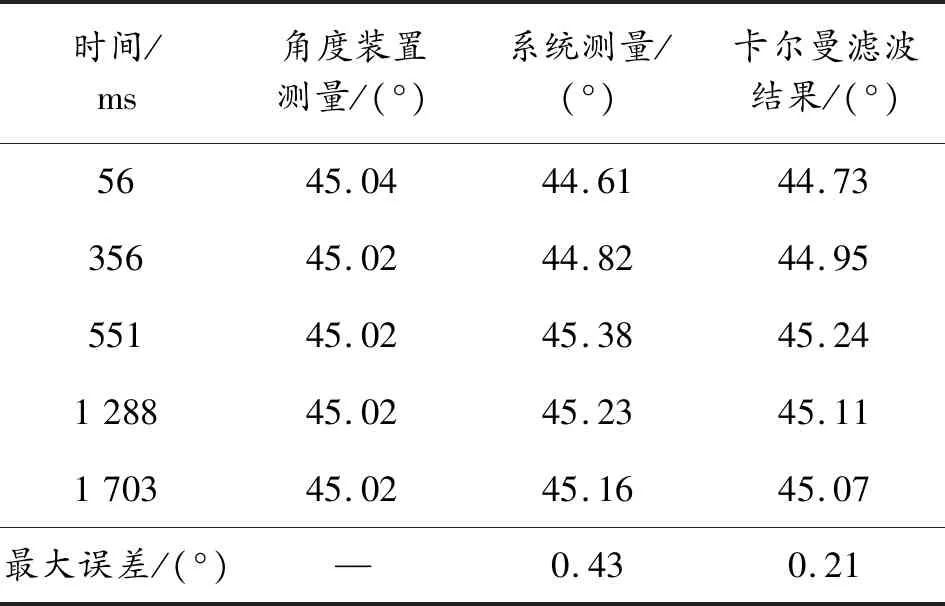
表2 静止在45°位置的俯仰角数据
图4是装置在运动状态下测得的俯仰角,其中,曲线1为角度装置测量值;曲线2为系统测量值;曲线3为卡尔曼滤波结果。表3为测试仪在运动状态下抽取的5个点的数据。在运动过程中可能会有部分抖动,但对数据的精确分析几乎没有影响。从表3中可以看出,系统测量最大偏差在0.77°,经过滤波处理后,最大偏差在0.46°,精度得到了较大的提高。
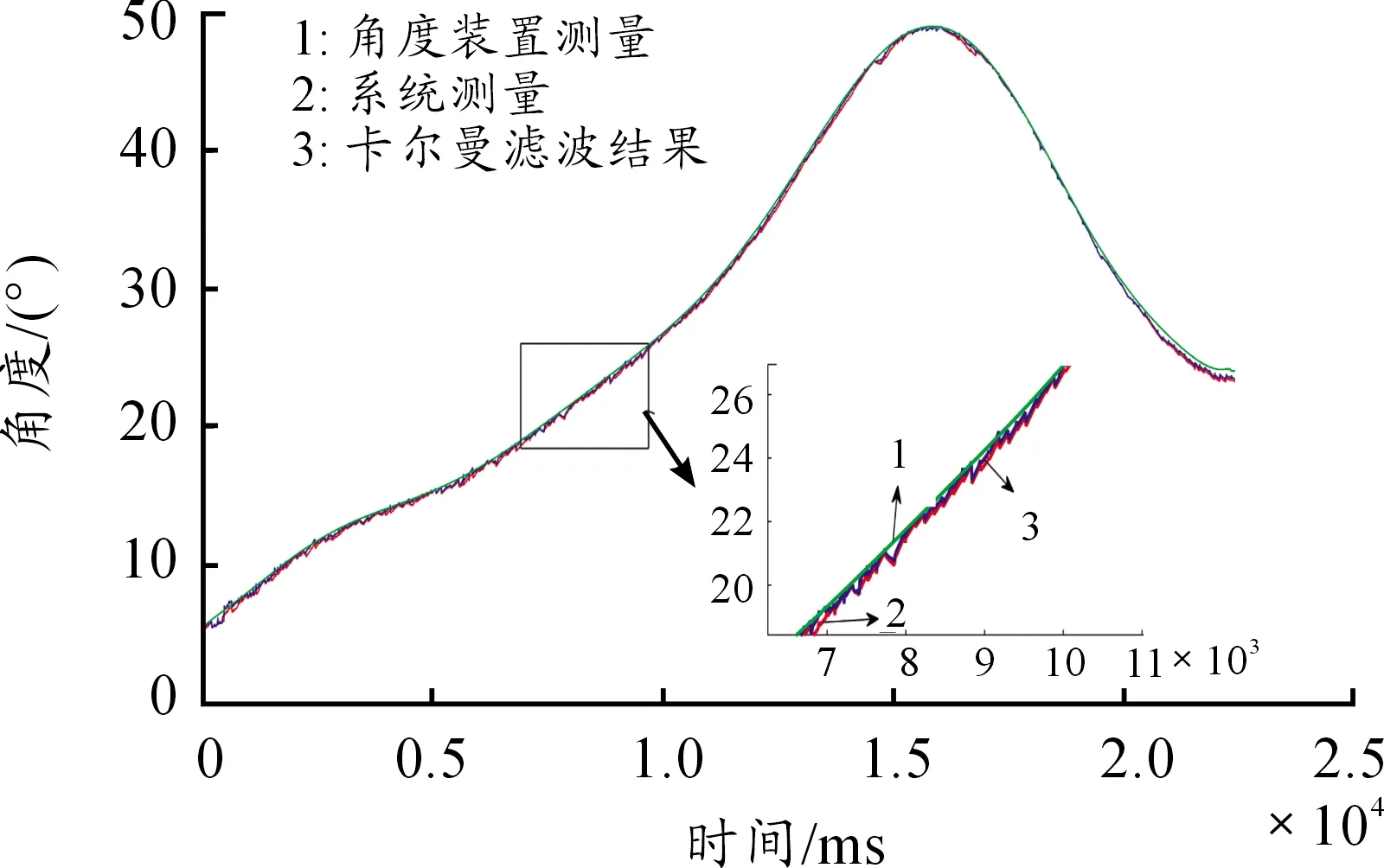
图4 运动状态下俯仰角的测量结果
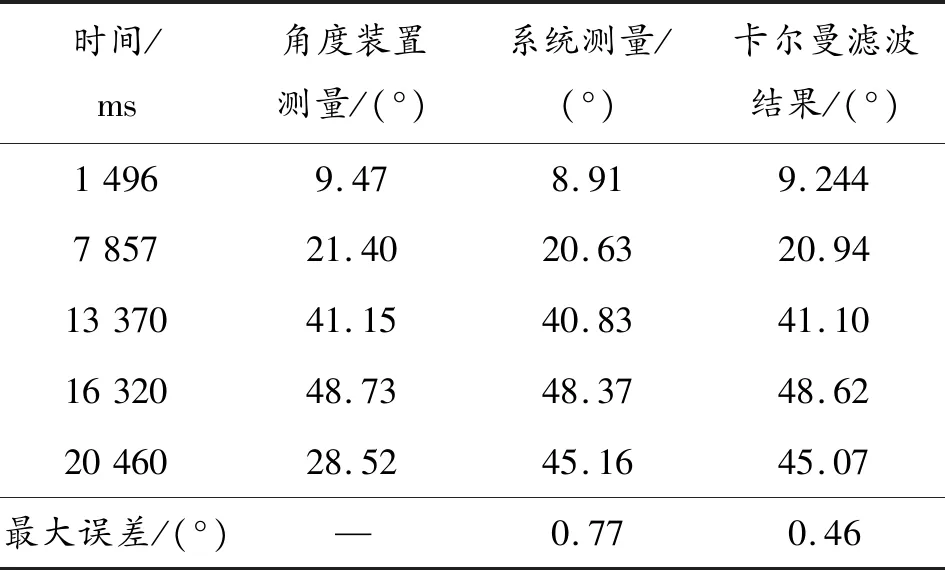
表3 运动状态下俯仰角测量结果
经测试,该系统能对测试装置的俯仰、横滚和偏航的数据存储及读取,通过系数优化的卡尔曼滤波算法提升了测量精度,并能够实时精准地跟踪装置姿态的变化,可以满足对测试装置姿态数据分析的需求。
4 结论
利用MPU9250传感器和SAM D21G ARM控制器设计了冲击波测试仪姿态测量系统,实现了姿态测量;通过系数优化的卡尔曼滤波算法对采集的姿态信息进行融合处理,测量精度显著的提高,满足对冲击波测试仪姿态数据采集分析的需求,为进一步研究冲击波在舱室、厂房或战舰等受限空间内的传播规律奠定了基础。
