某小型无人化作战平台机电联合仿真
2020-06-07顾祖成王永娟
吴 迪,顾祖成,王永娟,徐 诚
(南京理工大学 机械工程学院,南京 210094)
近年来随着反恐作战的需求,小型无人化作战平台成为国内外争相研究的热点和焦点。相比较装备大口径机枪的武器站,小型无人化作战平台以小口径枪械为武器,具有体积小、质量轻、射击精准、较强的机动性等优势,更加适于反恐作战。
小型无人化作战平台是一个典型的复杂机电系统,为检验是否满足战场需求,有必要采用机电联合仿真的方式进行设计。郭华新等[1]基于遥控武器站模型进行伺服位置系统的仿真,仿真结果验证了机电联合仿真方案的可行性,为遥控武器站的研究奠定了基础。王传有等[2]建立了武器站刚柔耦合动力学模型,结果表明将某型机枪安装在武器站上,其动态特性有所改变,为同类装备研发提供了理论依据。
为了验证小型无人化作战平台设计的可行性,本文通过UG NX、ADAMS和Matlab/Simulink软件建立小型无人作战平台的三维模型、动力学模型,并设计模糊PID的控制策略进行机电联合仿真,得到了阶跃跟踪曲线及电机角速度、角位移与扭矩随时间变化的曲线。
1 小型无人化作战机电联合仿真流程
该小型无人化作战平台仿真流程如图1所示。本文采用UG NX软件建立三维模型,将实体模型转成x_t格式[3-4],导入到ADAMS中,施加合理的载荷与约束,同时建立控制系统变量接口、定义输入、输出变量。在Matlab/Simulink软件中建立控制系统模型与动力学系统接口连接,进行联合仿真[5-6]。若结果符合要求,则进行记录,否则通过修改控制策略与模型结构的方式,修正仿真结果。

图1 机电联合仿真总体流程框图
2 动力学模型建模
2.1 建立三维模型与虚拟样机
该小型无人化作战平台由上位机、武器系统、方向与高低回转部件、光电组件和控制组件组成。武器系统为带有首发装填装置的03式5.8 mm突击步枪;光电组件进行视频采集与目标测距任务;方向与高低回转部件作用是完成旋转调枪诸动作;通过操作上位机将命令发送给控制组件,控制组件解析指令后完成调转角度、首发装填、测距等动作,系统组成如图2所示。

图2 小型无人化作战平台系统组成框图
本文采用UG NX软件建立小型无人化作战平台的三维模型,在ADAMS仿真软件中施加合理的约束。为了提高计算效率,有必要对三维模型进行简化,但需要保证模型质量与原型样机无过大差别,以保证结果的准确性[8],三维简化模型如图3所示。

图3 小型无人化作战平台三维简化模型
装配完成后,将模型以x_t格式导入ADAMS软件中,定义相应的材料属性并添加相应的约束。该小型无人化作战平台的工作情况为:底座固定于地面上,电机(含减速机构)驱动方向回转部件与高低回转部件转动,对目标进行跟踪。支撑架用于连接方向、高低回转部件与武器系统,因而与武器系统采用固定约束,与回转部件采用回转副进行约束,部分约束关系如表1所示。

表1 小型无人化作战平台约束关系
3 建立模糊自适应PID控制器模型
本文设计了基于电机位置环的模糊PID控制系统,可自动修正比例、积分、微分3个参数,同时具有模糊控制与PID控制的优点,控制精度高、响应迅速、鲁棒性好[8-9]。在Matlab/Simulink软件中建立仿真系统模型,如图4所示。

图4 基于模糊自适应PID的三闭环Simulink模型框图
其阶跃跟踪曲线与阶跃误差曲线如图5、图6所示。由于方向与高低回转部件采用的是同种型号电机,设定不考虑动力学的影响,两个电机仿真结果相同。如图5所示,当输入信号为阶跃信号时,产生轻微的超调现象,稳定时间为0.18 s。为了模拟电机转动时武器系统射击的情况,在1 s时突加0.1 N·m负载干扰,如图7、图8曲线所示,可以看到,该控制系统具有一定的抗干扰能力。

图5 阶跃跟踪曲线

图6 阶跃误差曲线
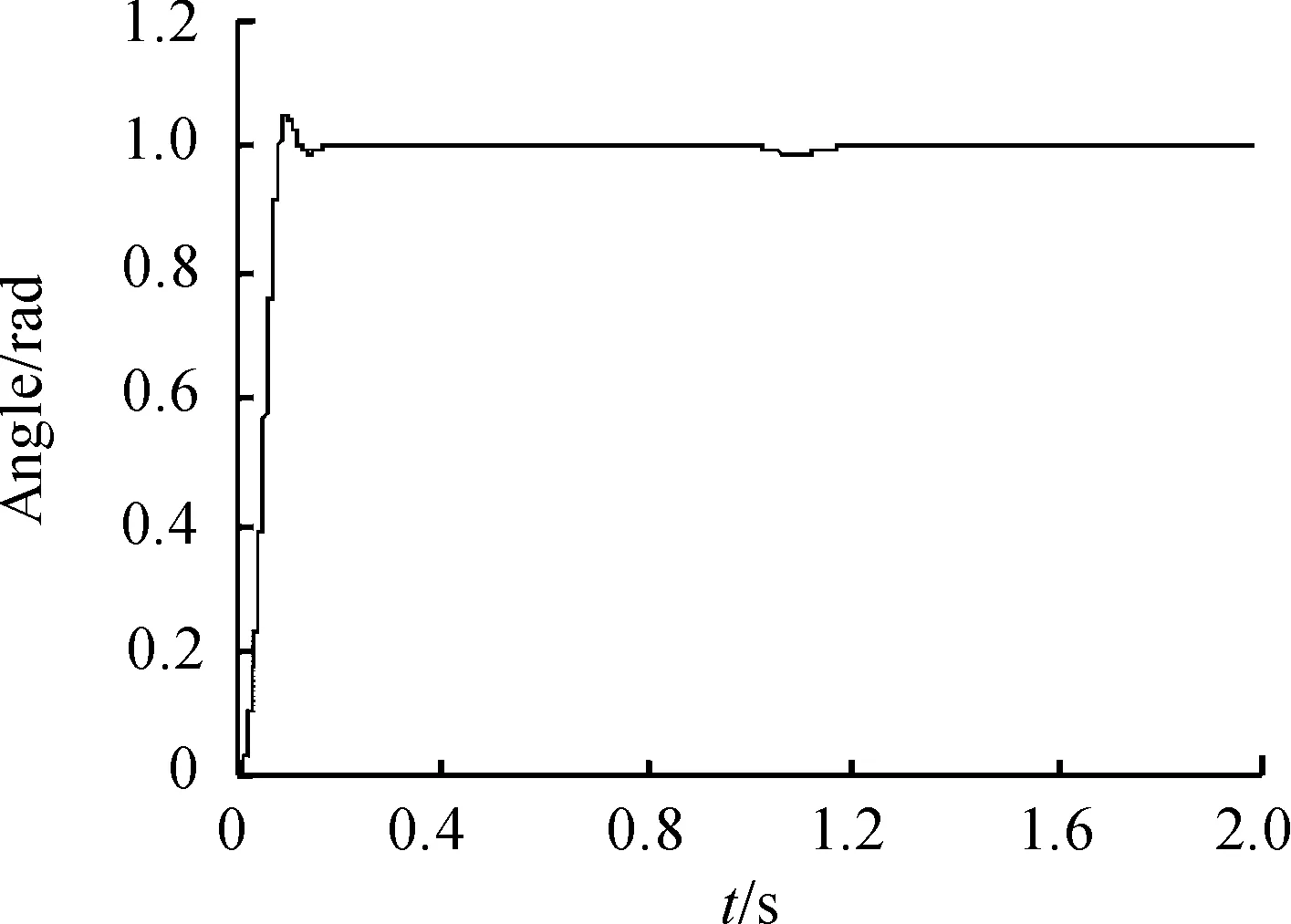
图7 突加负载阶跃跟踪曲线
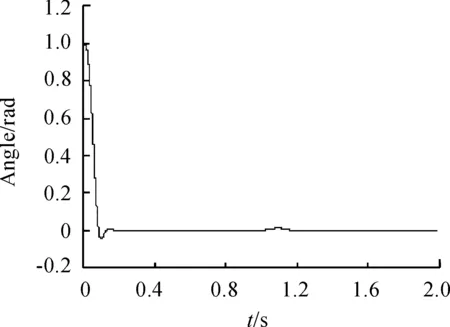
图8 突加负载阶跃误差曲线
4 小型无人化作战平台机电联合仿真
4.1 构建仿真模型
构件机电联合仿真模型,需要先在ADAMS中定义输入变量与输出变量,与Matlab/Simulink控制系统部分之间形成闭环回路[10],以实现动力学模型与控制系统部分联合仿真。在ADAMS中定义输入变量为电机扭矩,输出变量为电机角速度,如图9所示。

图9 机电联合仿真闭合回路示意图
在Matlab/Simulink中运行Controls_Plant_fuzzy,输入ADAMS_sys,在ADAMS_sub模块中设置参数。联合仿真中,先使方向回转部件向左旋转45°,再令高低回转部件向上旋转10°,仿真时间均为2 s。减速器减速比为53.5∶1,因此方向电机旋转2407.5°,即42 rad;高低电机旋转535°,即9.33 rad。根据电机型号与战术指标,要求机电联合仿真中方位电机角速度不超过27.6 rad/s,高低电机角速度于不超过14 rad/s,电机扭矩不大于7.2 N·m。基于位置环模糊PID的小型无人化作战平台机电联合仿真模型如图10所示。

图10 基于位置环模糊PID的小型无人发射装置机电联合仿真Simulink框图
4.2 仿真结果分析
位置环仿真结果如图11、图12所示。方位电机在1.6 s达到稳态,转动位置为42 rad,基本无超调;高低电机在0.6 s达到稳态,转动位置为9.3 rad,轻微超调。
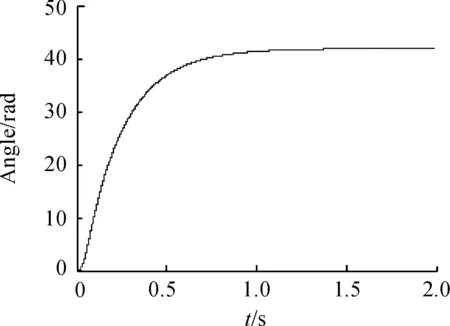
图11 方位电机位置曲线
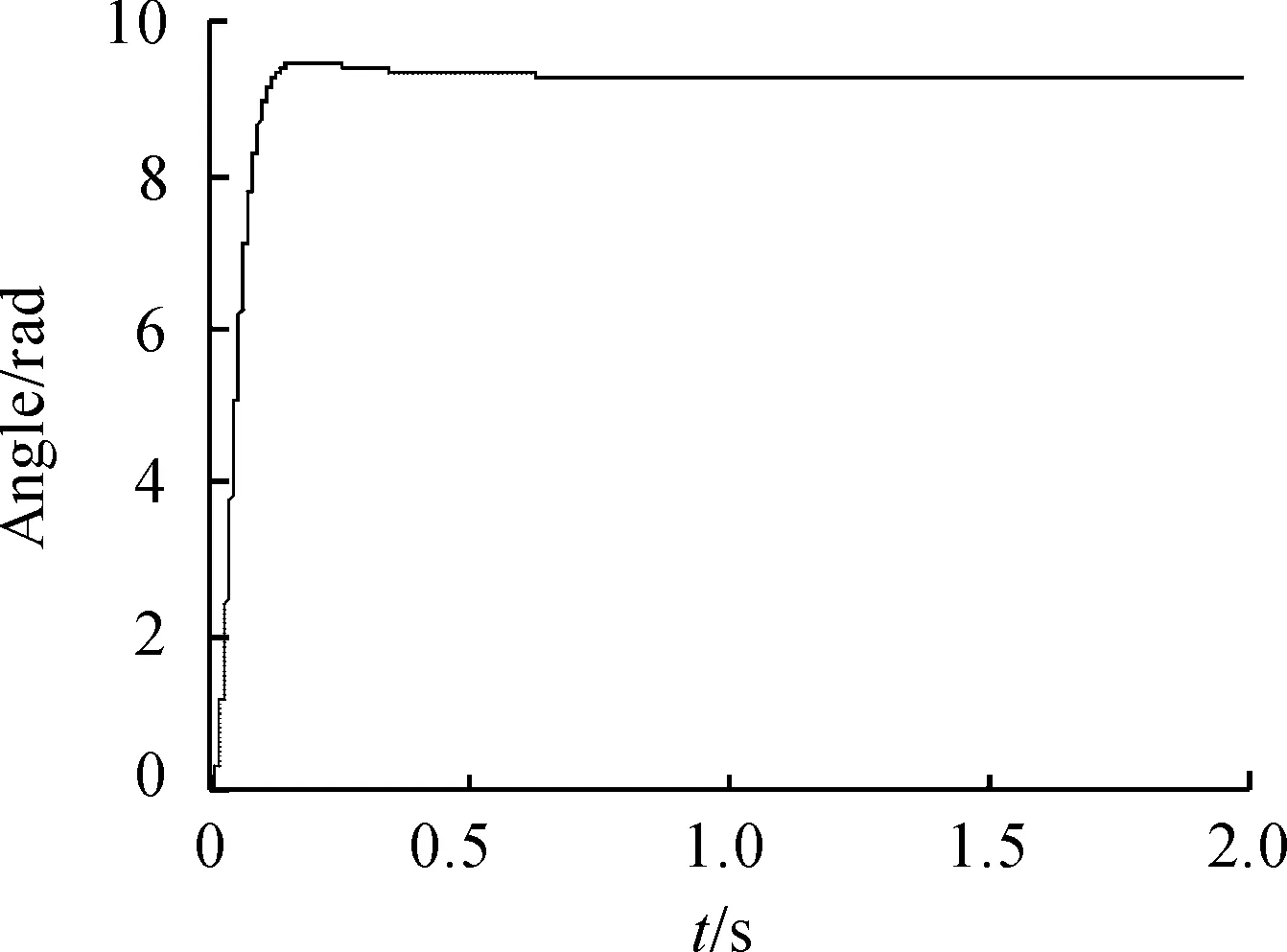
图12 高低电机位置曲线
速度环仿真结果如图13、图14所示。由图13、图14可知,方位电机实际速度在1.6 s内随着电机输入速度先增加后减小,1.6 s停止转动;高低电机实际速度在0.6 s内随着电机输入速度先增加后减小,0.6 s停止转动。方位电机速度未超过27.6 rad/s,高低电机角未超过14 rad/s,因而符合技术指标要求。
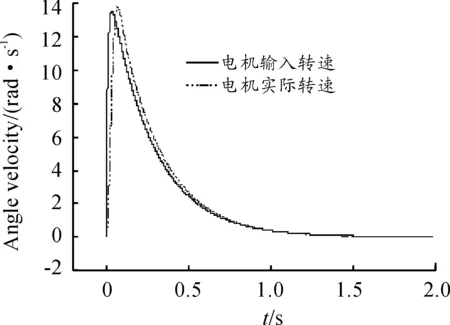
图13 方位电机速度曲线

图14 高低电机速度曲线
电机扭矩环仿真结果如图15、图16所示。由图15、图16可知,方位电机转矩在1.6 s降为0 N·m;高低电机转矩在0.6 s降为-2.3 N·m。高低电机停止转动后进行限位,需要一定扭矩克服武器系统质量,方位电机停止转动后则不存在限位扭矩。由电机性能参数可知,电机峰值力矩为7.2 N·m,电机扭矩的仿真结果满足电机技术指标。
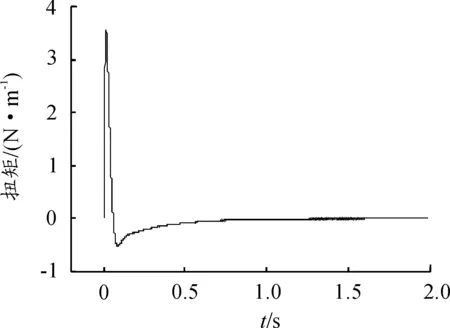
图15 方位电机扭矩曲线

图16 高低电机扭矩曲线
5 结论
本文在ADAMS环境下建立了该小型无人化作战平台的动力学模型,通过Matlab/Simulink软件构建了模糊PID自适应控制系统,并进行了两者的联合仿真及分析,得到了其角位移、角速度与扭矩随时间变化的曲线,结果表明控制精度高、误差小、响应迅速、鲁棒性好,验证了该小型无人化作战平台的机械结构与控制策略满足设计需求,可为同类装备的基础研究提供参考。
