螺旋桨分布对小型串列翼无人机气动特性影响研究
2020-06-07马进超张春元陈安民张天波
马进超,张春元,李 翔,陈安民,张天波
(1.中北大学 机电工程学院,太原 030051;2.太原龙翔科技股份有限公司,太原 030024)
目前在中小型以及一些长航时的无人机开始采用串置翼布局,特别是在倾转四旋翼当中。串列翼布局无人机不仅可以增加整体结构刚度,而且通过改变机翼之间的升力分布使飞机的诱导阻力降低[1],适合作为巡航使用。螺旋桨飞机在研制过程中,其气动设计必须要着重考虑螺旋桨滑流对全机的气动性能影响[2-4]。串置翼无人机由于采用前后翼的形式,上下两翼的垂直距离又有相差,因此前置状态的螺旋桨,其滑流必定会对前后翼产生影响,而且也会对全机的气动特性产生影响。
针对串列翼前后翼干扰翼问题国内外众多学者外已经进行了大量理论及实验研究[5-9]。常浩等[5]对串列翼形式的复合无人飞行器进行了不同机翼布局的气动特性分析,唐胜景等[6]对后翼上反串置翼无人机进行了数值分析。张国庆等[7]对低雷诺数下串置翼型气动特性分析。程浩等[8]对前翼在上下两种布局的串列翼飞行器进行了仿真研究,结果发现对于前翼在上的串列翼布局具有较好的各方面性能。国外Daniel F.Scharpf等[9]对串置翼在低雷诺数下进行了实验研究,然而这些都是对干净构型(无螺旋桨或螺旋桨尾推方式,本研究着重指无螺旋桨)的串置翼布局无人机进行气动特性分析。本研究以前翼在上,后翼在下,前后机翼展长相等的布局为研究基础,进行螺旋桨分布对小型串列翼无人机的气动特性影响进行数值模拟研究。
在研究中主要对螺旋桨安装在机头位置、机翼靠近中部前缘、机翼翼梢前缘以及无螺旋桨无人机气动特性进行数值模拟,其中安装于翼梢前缘处螺旋桨正反转,其余均单向旋转,并分析这几种情况下螺旋桨对串列翼无人机前后翼气动影响,为小型串列翼布局无人机尤其是双发或双倾转旋翼串列翼无人机的设计提供有意义的参考。
1 计算模型和计算方法
本文研究螺旋桨分布在机身前部、机翼前缘及机翼翼尖前翼情况对小型串列翼无人机的气动影响问题。如图1所示为螺旋桨分布位置和串置翼无人机实体模型。机身前拉式,螺旋桨直径为0.381 m,距机头0.6 m。机翼前拉式和翼梢正反转布局,螺旋桨直径均为0.279 m,螺旋桨距离机翼前缘均为0.1 m。各构型机翼均采用平直无扭转机翼,翼型选择NACA4309翼型,机翼弦长0.15 m,前后翼距离均为5倍弦长(0.75 m)且前后翼安装角度均为0°,前后翼垂直安装距离均为0.4倍弦长。螺旋桨的安装角度均为0°,垂直安装距离均为0 m。
图1(a)及图1(b)和图1(c)机翼螺旋桨旋转方向均为沿来流方向的逆时针方向,而图1(d)右机翼螺旋桨旋转方向为沿来流方向的顺时针方向,图1(b)螺旋桨中心点位于距机身对称面的0.3m处,图1(c)和图1(d)螺旋桨中心均位于机翼翼尖处。

图1 螺旋桨分布及串列翼布局无人机构型示意图
采用ICEM划分网格(见图2),由于采用混合网格形式,旋转区域(螺旋桨附近)采用非结构网格,按照螺旋桨0.7倍半径处的特征弦长计算雷诺数并保证y+≈1,并保证网格数量约为150万。非旋转区域采用结构化网格划分(机身和机翼),第1层网格高度为1.5×10-5m,并保证y+≈1。图1(a)网格总数量为720万左右,而图1(b)、图1(c)和图1(d)网格总数量大约在840万左右。来流速度20 m/s,暂不考虑垂尾对飞机的影响。

图2 无人机结构与非结构混合网格模型
本研究采用多重参考系(MRF)方法求解基于结构与非结构混合网格技术的SSTk-ω湍流模型准定常求解雷诺平均Navier-Stokes(RANS)方程。由于无人机飞行高度较低且飞行速度较小,所以采用不可压进行求解。压力项采用二阶格式,其他项均采用二阶迎风格式。
2 算例验证
针对某型直径0.279 m和0.381 m的双叶螺旋桨运用MRF进行验证。针对不同转速地面状态下进行数值模拟并和试验数据进行比较。
如图3,运用Mayatech MT10PRO电机拉力测试台分别对这两种型号的螺旋桨进行了地面状态拉力多次试验并取平均值,由图3可以看出随着螺旋桨转速的增大,误差有小幅度增大,但发展趋势类似。因此基于混合网格的SSTk-ω湍流模型可以用于模拟螺旋桨的旋转运动。为避免其他因素的影响,如图3,选取无人机巡航状态的拉力均为8 N,对应机身前拉螺旋桨(直径0.381 m)的转速为6 780 r/min,机翼前拉螺及翼梢螺旋桨(直径0.279 m)对应转速为7 670 r/min。

图3 螺旋桨拉力
3 机身前拉布局的计算结果与分析
图4为螺旋桨安装在机身前、机翼前缘、机翼翼梢处的升阻系数及其俯仰力矩系数曲线。
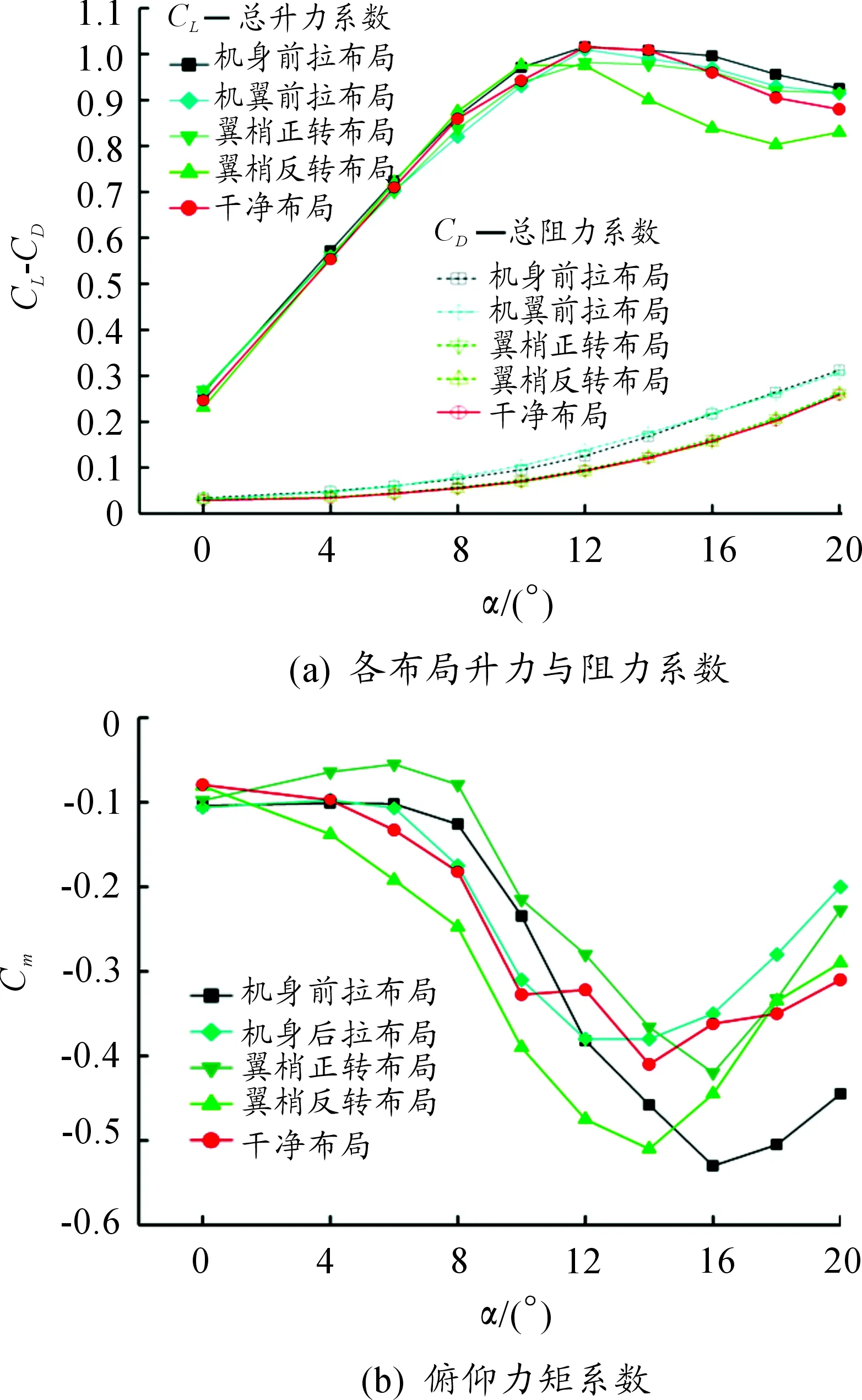
图4 各布局升力与阻力系数及俯仰力矩系数
由图4可以看到,机身前拉布局及机翼前拉布局其阻力均较大于干净布局阻力,而升力系数却不一定总是大于干净布局系数,翼梢螺旋桨正转布局其总升力与反转布局相比较优,两者总阻力相差不大,因而前者升阻比较大,因此翼尖安装螺旋桨其正转相对反转升阻比较大[10]。同时可以发现机身前拉布局其俯仰力矩系数变化最大,而机翼前拉布局其俯仰力矩系数变化较小。因此需要更为详细的对比分析。
对串列翼布局无人机机身前拉布局和干净布局进行数值模拟,得到不同迎角下的前后翼升力系数,作出图5,螺旋桨滑流在小迎角情况下对前翼和后翼都有增升作用,但在迎角11°时,机身前拉式布局前翼升力小于干净布局,而在17°又大于干净布局前翼升力。迎角在5°之前,后翼升力随着迎角的增大而增大,在5°到11°之间小于干净布局后翼升力,而在11°之后后翼又升力明显大于干净布局后翼升力。结合图4(a)可以看到,机身前拉式布局总升力基本优于干净布局总升力。
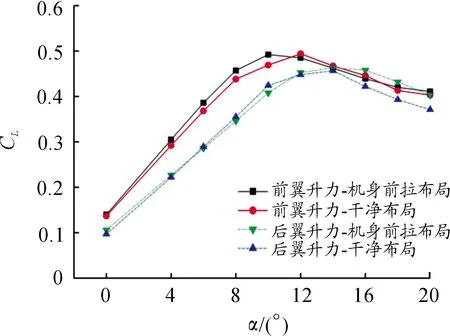
图5 机身前拉布局和干净布局前后翼升力系数
图6为螺旋桨滑流速度分布云图,迎角分别为0°和16°。V为当地速度,V∞为来流速度,由速度云图可以看到随着迎角的增加,螺旋桨旋转产生的气流随着迎角的增大向左机翼上方偏转。

图6 螺旋桨滑流速度云图
螺旋桨相对来流逆时针旋转,由于前翼安装位置高于螺旋桨,致使来流受到螺旋桨旋转影响,如图7(a)所示(截面距离前翼前缘0.1 m处,如图6(a)前翼上的截面图,视图方向与其一致),而左下方靠近机身处出现较弱的上洗涡,但此涡对机翼的作用相当于下洗,致使有效迎角减少,升力减少而右机翼上方出现较强的上洗涡,提高了此处的有效迎角,致使升力提高,同时螺旋桨滑流的加速作用致使前翼上表面流速加快,出现较大的低压区,螺旋桨滑流加速作用以及右前翼上洗涡的共同作用在小迎角情况下大于左前翼上洗涡的影响,致使在无人机在小迎角情况下升力有效提高。
结合图6(b)和图7(b),随着迎角的增加右前翼上方的上洗涡逐渐靠近机身而左前翼上方的下洗涡逐渐增强,导致左前翼机翼有效迎角减少,致使前翼在11°之后升力减小,而在17°之后左前翼上方的下洗涡反倒抑制了该处机翼的失速,因此避免了前翼升力的较大损失。

图7 前翼速度云图和涡结构
由于后翼在下,小迎角情况下,后翼受到螺旋桨的滑流加速作用,升力增大,在5°到11°之间,结合图6(b)和图8(截面距离后翼前缘0.02 m处,如图6(b)后翼上的截面图,视图方向与其一致)可以看到,左后翼上方受到较强的下洗涡,致使有效迎角减少,而右后翼上表面的上洗涡已向机身上方偏移,对右后翼的作用减少因而升力较小,而11°之后左后翼上表面受到螺旋桨微弱的下洗涡的影响,抑制了左后翼的失速,故后翼升力明显大于干净布局。结合图4(b)可以看到,后翼升力系数的变化较大导致整机俯仰力矩系数产生较大变化。
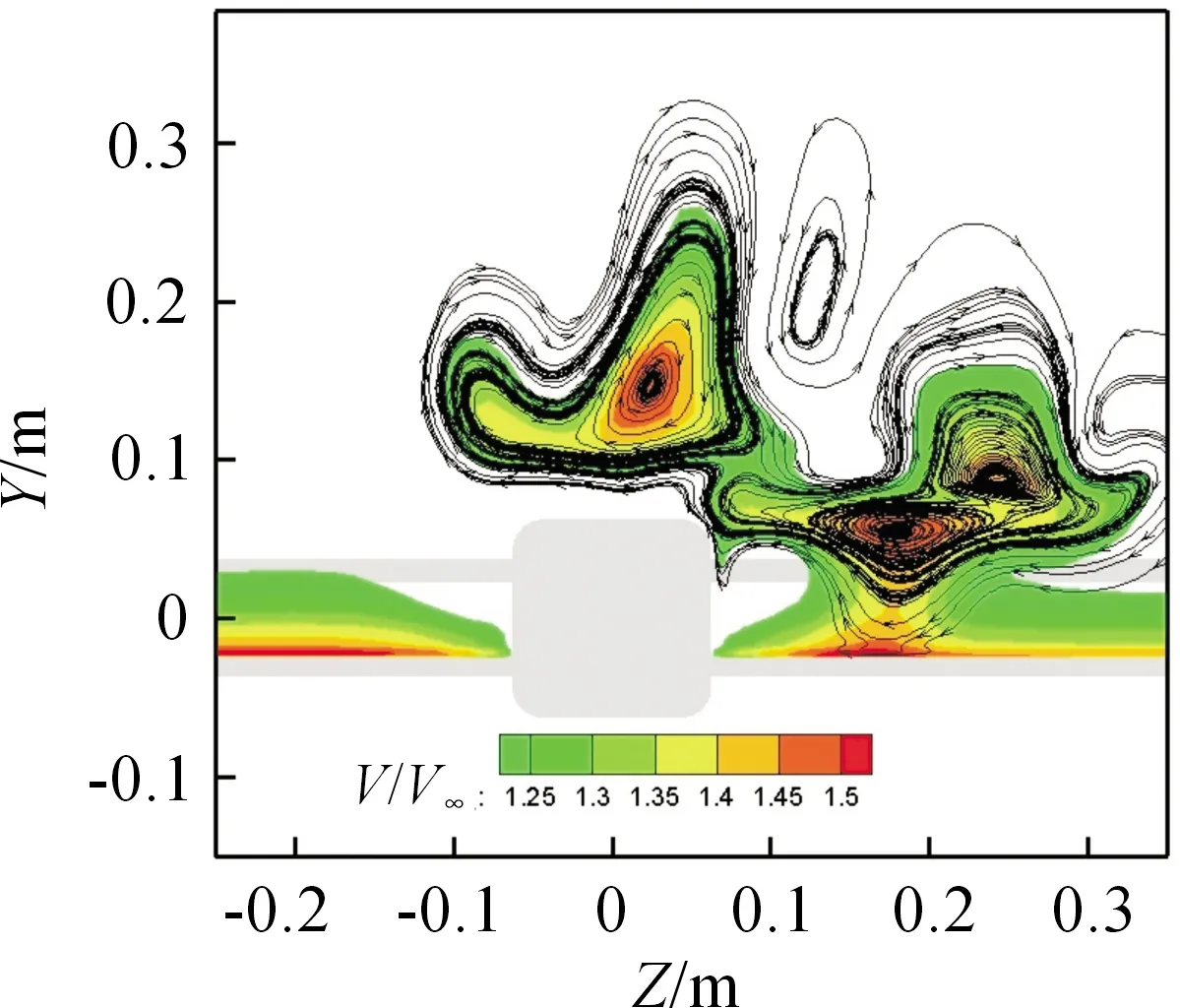
图8 迎角10°后翼截面速度云图和涡结构
4 机翼前拉布局的计算结果与分析
对螺旋桨安装机翼前缘布局进行模拟仿真与干净构型进行对比,得到如图9所示前后翼力系数曲线。小迎角情况下,螺旋桨滑流对前翼和后翼都具有增升作用。同样在5°到15°之间机翼前拉布局前翼升力均小于干净布局,此种情况是由于右前翼受到旋翼下洗影响较大,如图10(截面距离前翼前缘0.02 m处,如图6(a)前翼上的截面图,视图方向与其一致)右前翼所示,同时机翼中部后缘和翼根处出现气流分离,导致气流流速小于来流速度,如图11所示(截面距离前翼前缘0.1 m处,视图方向与图6一致),导致升力减少,前翼整体升力减少,而在15°之后由于螺旋桨产生的涡系向机身靠拢,靠近机身处的机翼前缘上表面受到螺旋桨滑流加速作用,有效减小翼根的失速,升力增大。旋翼的存在有效提高了前翼翼根的失速迎角。

图9 机翼前拉布局与干净布局各系数曲线
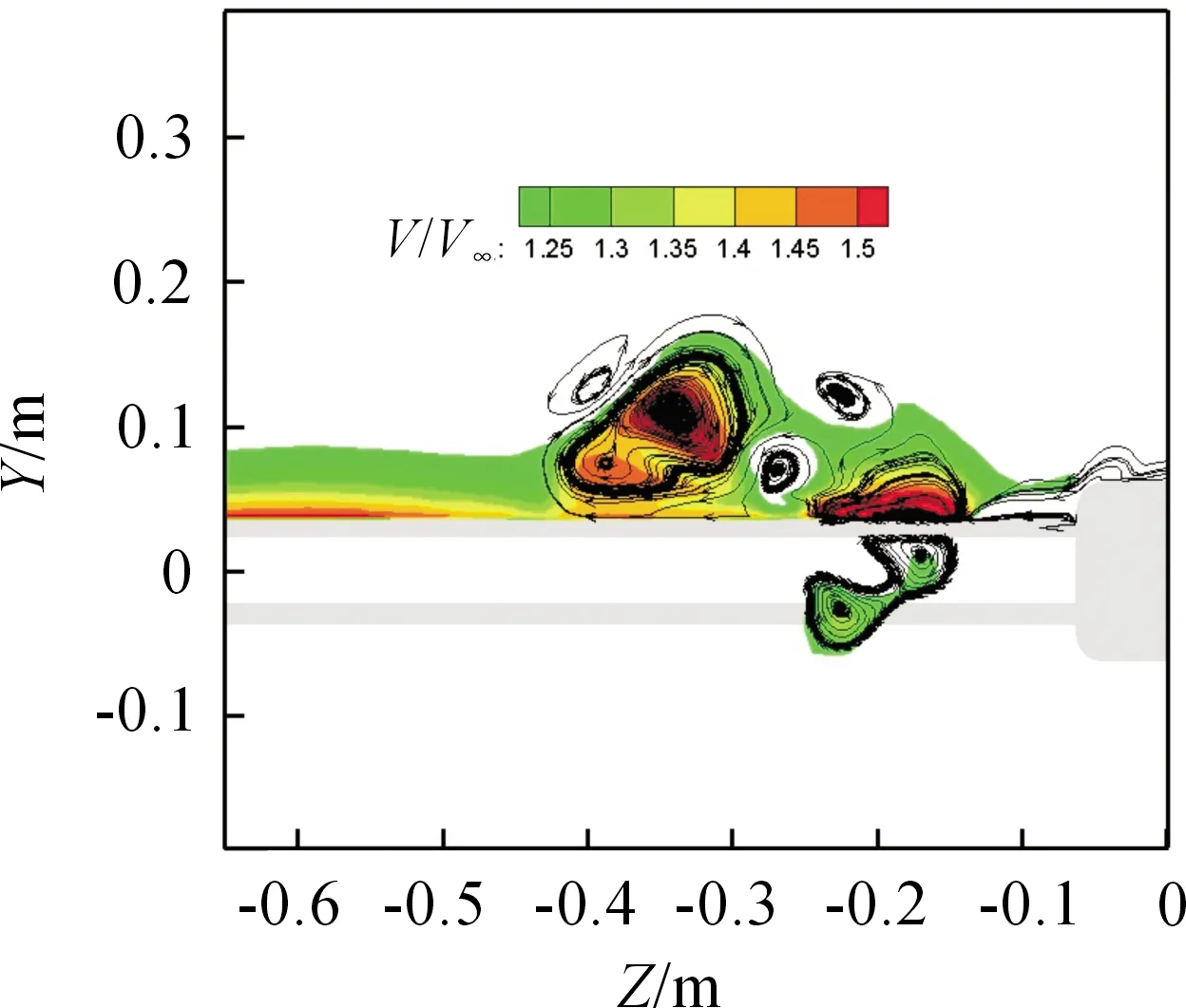
图10 迎角10°前翼截面速度云图和涡结构
在5°到10°之间,后翼中部靠近翼根处受到前旋翼下洗流影响较大,在机翼表面产生下洗涡,而上洗涡向上方偏转,如图12所示(截面距离后翼前缘0.02 m处,视图方向与图6一致),导致有效迎角减小,升力减小,随迎角的增大,螺旋桨产生的气流向机身内偏转,如图13所示;12°时由于旋翼下洗流正好流过后翼翼根上表面,避免后翼翼根产生气流分离,升力有效增大,而在14°时,后翼后缘中部同前翼一样出现气流分离,导致后翼升力减小,16°之后干净构型后翼翼根严重失速,而机翼前拉布局由于旋翼的滑流有效抑制后翼翼根的失速,升力有所提高。

图11 迎角10°前翼后缘截面速度云图和涡结构

图12 迎角10°后翼截面速度云图和涡结构
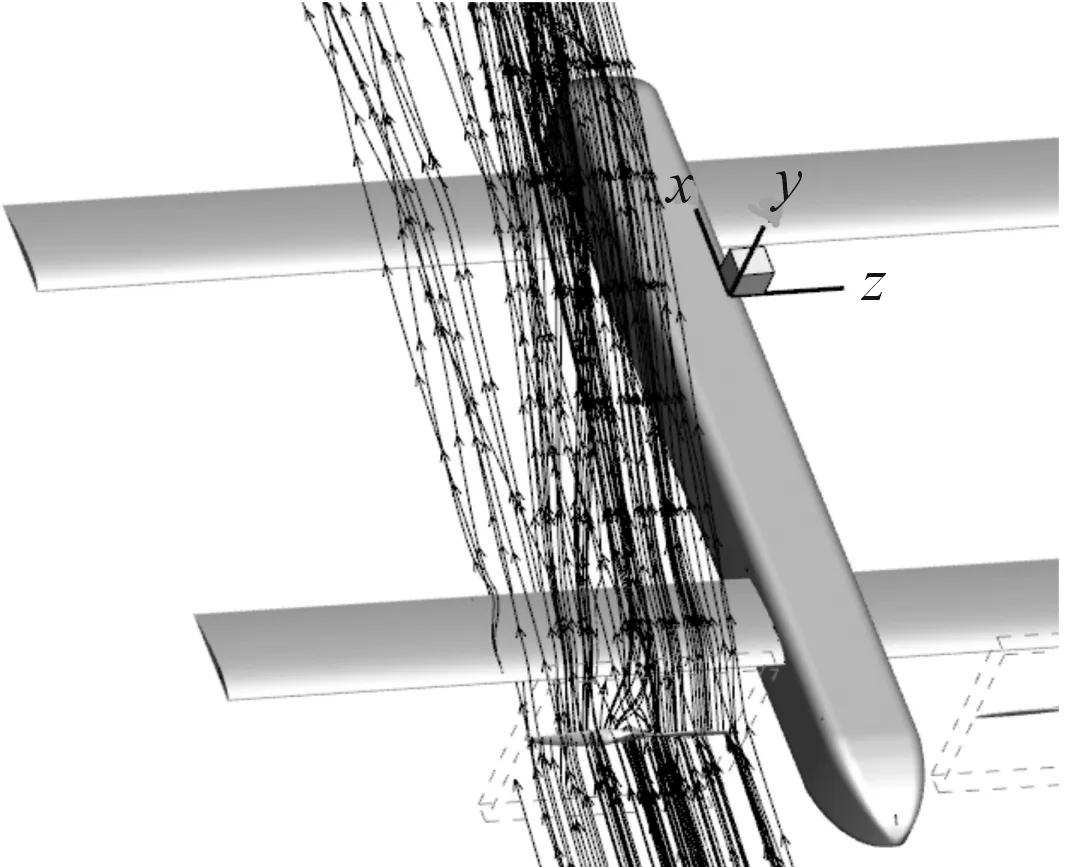
图13 迎角为10°空间流线图
5 翼梢螺旋桨正反转布局和计算结果与分析
对螺旋桨安装在翼梢正反转两种布局进行模拟仿真与干净构型进行对比,得到如图14所示各系数对比。翼梢螺旋桨正转布局,其螺旋桨相对右前翼沿来流逆时针旋转作用,翼尖气流相对迎角较大,小迎角情况下可有效提高前翼升力,而在11°到17°之间前翼升力微小于干净布局前翼升力,这主要是由于螺旋桨气流向内偏转,这与机翼前拉布局类似(见图13),翼尖受螺旋桨下洗流影响大,导致翼尖升力减少,同时螺旋桨向上偏转的气流与来流汇聚导致前翼中部气流分离,升力减少。而在17°之后螺旋桨滑流抑制了翼尖的气流分流,从而有效提高了前翼升力。这可以通过螺旋桨向外偏移微小距离以充分利用滑流的增升作用,减少螺旋桨下洗流的影响,以提高前翼升力。
翼梢螺旋桨反转布局,其螺旋桨相对右前翼沿来流顺时针旋转,其前翼升力系数总是小于干净布局前翼升力系数,这主要靠近翼尖处螺旋桨下洗较强,其滑流增升作用弱于下洗作用,同时在大迎角情况下螺旋桨向下旋转的气流与来流汇聚形成较强分离涡,导致靠近翼尖处机翼后缘形成气流分离,前翼先于干净布局前翼失速。

图14 翼梢正反转布局与干净布局各系数对比
翼梢螺旋桨正转布局后翼在3°之前升力大于干净布局这主要是旋翼带动气流向上旋转,后翼翼尖来流迎角增大,升力有所增大。而在3°到15°之间,后翼升力明显小于干净布局升力,前旋翼的气流向机身内偏转,导致旋翼下洗气流作用在后翼靠近翼尖部分,其有效迎角减小,升力减小,而在15°之后又大于干净布局,这主要是由于旋翼的下洗流作用在后翼上表面有效地抑制了后翼的气流分离,提高了后翼失速迎角,因此升力有所增大。
翼梢螺旋桨反转布局,后翼在小迎角情况下略大于干净布局后翼升力,这主要是由于螺旋桨旋转方向与正转布局相反,其涡系随着迎角的增大向远离后翼方向发展,旋翼和前翼的共同作用,略提高了后翼的升力。而在12°之后,后翼升力明显小于干净布局后翼升力,旋翼向下偏转的气流与来流汇聚导致翼尖及机翼中部气流进一步分离,因而升力有所减少。
6 结论
螺旋桨滑流下对串列翼无人机的前后翼升力及俯仰力矩特性影响明显。采用机身前拉布局的串列翼,其前后翼升力及总升力相对其他布局在较大迎角时比较大,但其俯仰力矩系数变化较大;机翼前拉布局其螺旋桨对前后翼升力影响较为复杂,但其俯仰力矩变化相对较小;翼梢处安装螺旋桨,其正转布局前后翼升力及俯仰力矩系数均较优于反转布局。若采用双发或双倾转旋翼的串列翼无人机,应充分利用滑流增升,尽可能避免螺旋桨涡系的不利影响。
