基于移动最小二乘法的微型光谱仪标定方法
2020-06-06韩洋洋严宪泽
陈 朋,韩洋洋,严宪泽,昝 昊
(1.浙江工业大学 计算机科学与技术学院,杭州 310023;2.浙江工业大学 信息工程学院,杭州 310023)
0 引言
微型光谱仪在现代工程应用中,对成分的检测发挥着越来越重要的作用。由于每种物质成分都有其独特的光谱特征,通过微型光谱仪分析检测物质可以快速准确地得到正确的结果,相比于其他检测方法,其具有重量轻、体积小、探测速度快等优点[1],其对物质的非破坏性更具有独特的优越性。
微型光谱仪在设计制造后,标定是一个重要的步骤。微型光谱仪的标定是确定光电传感器像元与光谱波长的对应关系。目前光谱仪标定主要有两种方法:光学方程计算法和波长标定实验法。光学方程计算法是用光栅公式直接计算出波长的具体位置,这种方法通常受仪器工艺、安装位置等因素影响,误差较大。波长标定实验法是采用特征光谱在光电传感器对应的像元上找到相应的位置[2],并采用最小二乘法[3]拟合等方法实现波长的标定。根据拟合得到的数学模型,可以将所有像元对应的波长值计算出来[4-5]。
为了精确和有效地标定光谱仪,波长标定通常使用标准光源,用拟合或插值方法进行标定。目前国内外对光谱仪标定方法研究主要有对标定装置的研究和标定算法的研究[6]。在对标定装置研究上,吴越[7]等人在分析实验室常用波长定标方法的基础上,搭建了一种基于CO2激光器+积分球的波长定标装置,采用该定标装置进行波长标定,然后用多项式算法拟合获得了较高的标定精度。毛靖华[8]等人选取超静氙灯作为标定光源,构建了基于中阶梯衍射光栅的波长标定装置,对仪器进行了波长标定。Yu Z[9]等人采用波导梳状滤波器对分光计进行波长校准,解决了基线校准不好、特征峰分布不均匀的问题,有效地改善了多项式拟合精度低的缺点。以上通过对标定装置的改进都在不同程度上增加了标定装置自身误差对标定结果的影响。同时标定装置操作复杂,难以商业化。
在标定方法研究上,Cho J[10]等人利用一个带有两个三角项的波长校准模型,将水平像元与低压汞灯五条线的已知波长进行最小二乘拟合。Zhang F[11]等人在光栅衍射方程的基础上,结合分析光栅、正弦杆和扫描机构螺杆之间的机械传动关系,建立了波长误差和机械误差的数学模型,提出了一种基于正弦棒长度调整和误差补偿的波长精确标定方法。Kim[12-13]等人只需要一个精确的波长就可以指定整个波长范围。在标定方法研究上,大多基于最小二乘法拟合方式[14],拟合之后的光谱信号由于受到噪声等因素的影响,波长和感光元件的像元之间并不是严格的多项式关系,误差的标准差较大。
综上所述,本文针对标准光源的特征光谱和传统拟合方法的缺点,首次提出基于MLS的微型光谱仪标定方法,解决了最小二乘法误差标准差较大的问题。该方法使用C#作为编程语言,在WPF平台(Windows Presentation Foundation)上实现该方法。首先使用汞氩灯和氖灯作为标定光源,然后针对原始特征光谱图中存在的高频噪声使用小波去噪法[15-16]去除,之后使用峰值图像定位算法找到特征光谱峰所对应的像元位置,最后筛选一部分标定点,使用移动最小二乘法标定。
1 标定方法总体介绍
本文提出的基于移动最小二乘法的微型光谱仪标定方法如图1所示。
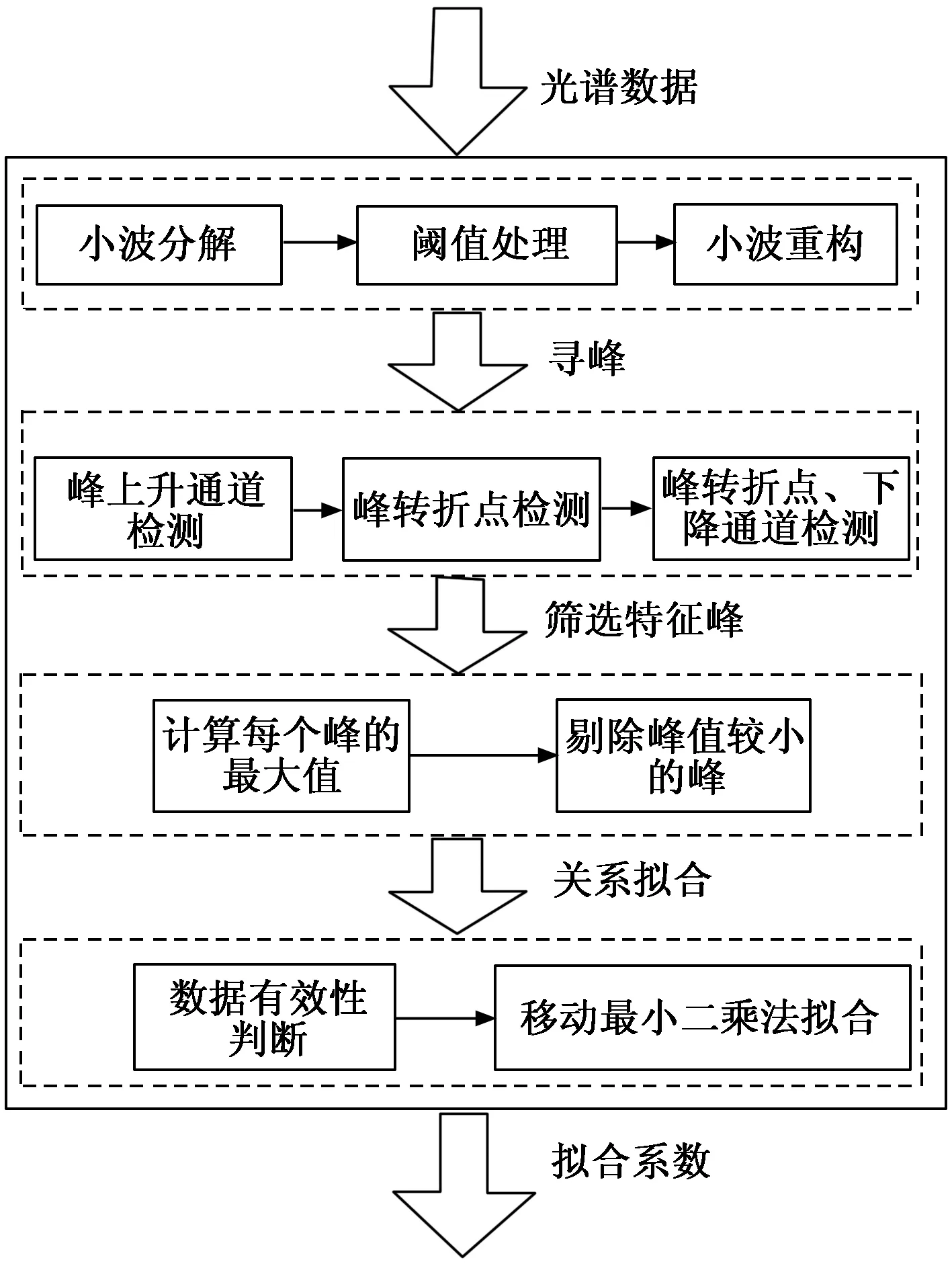
图1 标定方法设计图
该方法由小波去噪、寻找特征峰、筛选有效标定点和标定关系拟合四部分组成。
第一部分:由于原始光谱图中存在大量的高斯白噪声,使用小波去噪使信号的噪声得到抑制并且反映原始信号的特征尖峰得到很好地保留;第二部分:选取合适的特征峰起始位置决定了标定的精度,使用比较法,定位每个特征峰像元所在的位置;第三部分:筛选一部分均匀覆盖的特征峰所对应的像元位置参与标定;第四部分:选取指数型权函数和线性基函数,使用移动最小二乘法算出标定关系。
2 小波去噪去除高频噪声
微型光谱仪采集的信号包含各种噪声和干扰,微型光谱仪标定前需要进行平滑处理提高光谱数据的信噪比,同时还需要保留光谱特征。
首先对接收到的光谱数据进行平均去噪,然后再进行小波去噪。平均去噪认为相邻帧同一像元位置之间存在相关性,通过平均去噪,使光谱曲线预处理为较平滑。
小波理论是在傅里叶理论基础上发展而来,其主要原理基于短时傅里叶变换。小波去噪的实质是将含有噪声的信号从时域到小波空间的最优映射。小波去噪包括小波变换、阈值处理、小波重构三个步骤[17]。
小波变换首先要选择一个合适的小波基,小波基有很多种,小波基应该选择与待去除的噪声信号波形相似的小波函数。根据光谱仪高频噪声的特点,本文选取db3小波作为小波变换的小波基,db3小波的尺度函数和小波函数如图2所示,对原始光谱信号进行3层小波分解。

图2 db3小波尺度和小波函数
微型光谱仪感光元件获得的信号为离散数字信号,用滤波器执行离散小波变换如图3所示。图中a0(k)为原始离散信号,k为离散数据的序号,离散信号的总长度为n;离散小波变换相当于将原信号a0(长度为n)与滤波器函数H和L(长度为f)做卷积,然后进行降采样,舍弃一半的卷积结果,得到信号的近似值a1(k)和信号的近似值d1(k),之后对a1(k)继续分解。

图3 滤波器实现3层离散小波分解
阈值处理的作用是根据小波变换后各尺度的小波系数大小,去除噪声的小波系数并保留有效信号的小波系数。本文选用软阈值法,软阈值函数定义为式(1):

(1)
其中:ω为小波分解后的小波系数,T为设置的阈值。

3 特征光谱定位算法
汞氩灯等标准光源的光谱图峰值相对尖锐,存在重叠峰的情况[18]。本文针对此类光谱图和实验所用具有512点感光像元的微型光谱仪特点,基于比较法设计的光谱峰图像定位算法主要有两步:1)寻找每个峰的起始点、转折点和终止点,并进行标注;2)根据所作的标注判断特征峰的类型。
标注阶段:如图4所示,横轴为线阵感光元件的像元序号,纵轴为光强,从原点开始搜寻,当出现I(i) 图4 光谱特征峰起始点和终止点标注示意图 图5 光谱特征峰转折点标注示意图 对滤波之后的标准光源光谱图标注之后再进行峰值类型判断,如图6所示。 图6 判断光谱特征峰类型示意图 I_up与I_down之间出现一个独立峰;当出现I_turn时则认为出现一个重叠峰,搜寻峰的极大值时,按照I_up与I_turn、I_turn与I_down的规律看作是两个独立峰。本文使用的光谱仪感光元件的像元较少,获得的特征峰相对尖锐,对于特征峰所对应的像元只需要按照寻找极大值的方式即可找到,对于感光元件像元较多的光谱仪,还需要使用高斯拟合法、对称零面积卷积法等方法进一步处理[19],本文不再进一步分析。 设函数f(x)在求解域Ω内的近似为fh(x),f(x)在计算点x的邻域Ωx内局部近似为: (2) 基函数常用单项式,本文选取一维空间中单项式线性基函数,线性基如下: pT(x)=[1,x],m=2 (3) 求解域Ω用n个节点离散,在每个节点xI的权函数定义为: wI=w(x-xI),I=1,2,… (4) 近似函数fh(x)在节点处的误差的加权平方和为: (5) 其中:n是用于插值的场点数。 式(5)两边对a(x)求导得: (6) a(x)=A-1(x)B(x)y (7) 其中: (8) B(x)=[w1(x)p(x1),w2(x)p(x2),…,wnp(xn)] (9) y=[y1,y2,…,yn]T (10) 为了求解系数a(x),把式(7)代入式(2)得到移动最小二乘拟合函数: f(x)=pT(x)A-1(x)B(x)y (11) MLS标定的关键步骤是选取合适的权函数,权函数的选取应该满足非负性、紧支性、单调递减性和平滑性。常用的权函数类型有高斯函数、指数型函数、样条型函数和径向基函数等。根据微型光谱标定曲线线性特性,本文选取指数型函数作为基函数,形式如下: wI=e-((x-xI)/α)2 (12) 其中:参数α越大,wI越平滑,本文经过多次试验,选取α=60,此时微型光谱仪拟合效果最好。 移动最小二乘法的优点是应用较低阶的基,选取适当的权函数获得具有较高连续性和相容性的函数。 本文选用美国Pyxis公司研发的SQ-3000型可见波段的微型光谱仪作为标定精度测试对象。此光谱仪可检测的波段波长范围为380~800 nm,光谱仪的波长分辨率为1.5 nm,该型号微型光谱仪使用切尔尼-特纳光学结构,光电传感器为滨松S8378-512Q线性CMOS,各像元有其确定的编号,从1开始到512结束。由式(11)得到像元和波长的关系函数为: λ(i)=pT(i)A-1(i)B(i)y (13) 其中:i为像元序号,λ(i)为像元i所对应的波长。 波长标定需要通过测量标准物质的发射谱来完成,常用的波长标定光源为:氘灯发射谱、汞氩灯发射谱、氖灯发射谱等光源。随着微型光谱仪的发展,使用单一光源很难获得均匀分布的特征谱线,本文同时使用汞氩灯和氖灯对微型光谱仪标定,可以获得均匀分布的特征谱线,具有成本低、操作简单、精度高的优点,非常适合对200~1700 nm波段的微型光谱仪进行波长标定。标定装置的连接如图7所示。 图7 标定装置连接图 实验的流程如下:首先,完成微型光谱仪与汞氩灯标定光源的连接,微型光谱仪与计算机的连接;然后打开上位机软件,通过上位机软件调节积分时间采集合适的光谱图像并将其呈现到计算机上,记录此时的光谱图像;断开微型光谱仪与汞氩灯的连接,将微型光谱仪与氖灯进行连接,调节合适的积分时间,记录此时的光谱图像;通过上位机软件,将两次保存的光谱图像进行小波去噪、寻峰。 光谱仪标定集(参与标定的谱线特征点)选取的原则:谱线覆盖在光谱仪工作波长范围内,谱线的数目越多越好,谱线的间隔要大于光谱仪分辨率并且越均匀越好[5]。汞氩灯和氖灯的合成特征谱线在可见波段微型光谱仪去噪和寻峰后分布情况如图8所示,深色线为Hg-Ar灯的光谱图,浅色线为Ne灯的光谱图。根据特征谱线分布情况实验共选取11个特征点作为标定点,如表1所示。 图8 去噪后特征光谱分布图 表1 标定集特征谱线的波长和像元序号对应关系 特征谱波长/nm像元序号谱线来源404.65626Hg-Ar435.8862Hg-Ar546.074192Hg-Ar585.249239Ne614.306275Ne640.225307Ne667.828341Ne703.241385Ne724.512412Ne760.956459Hg-Ar794.818503Hg-Ar 标定结果检验方法:选取另一组未参与标定的特征点,测出相应的像元位置,将像元位置代入到拟合方程中,算出标定波长,特征谱线的真值与标定波长预测值之差即为标定误差。 本实验从汞氩灯和氖灯的合成特征光谱图中均匀地选取5个未参与标定的特征谱线作为测试集,测出相应的像元位置,将像元位置代入到拟合之后的方程中,算出标定波长,测试集的波长分别为626.649 nm、671.704 nm、692.947 nm、727.294 nm、763.511 nm。 为了验证标定精度,将测试集和标定集的像元位置均代入到标定关系函数中进行误差测试,标定误差如表2所示。 表2 MLS标定结果 通过对表2分析可知:采用基于移动最小二乘法的拟合绝对误差在0.401 nm内,满足标定所用微型光谱仪1.5 nm的分辨率要求。 进一步计算:MLS方法的拟合优度R2=0.999 3,拟合优度接近1,说明模型的拟合度较好。 为了验证使用MLS标定方法的优越性,分别使用最小二乘法三次多项式拟合(LS3)、最小二乘法四次多项式拟合(LS4)、三次样条插值法(CS)用相同的标定集进行标定对比。 标定之后,测试集和标定集的误差标准差对比如表3所示,其中CS拟合中标定集一定在拟合曲线上,故没有评价意义。通过对四种标定方法误差标准差比较可知,MLS标定的测试集误差标准差为0.192 nm,标定集误差标准差为0.136 nm,高于其他三种拟合方式,说明MLS法标定结果更加稳定。 表3 多种标定方法误差标准差比较结果 针对微型光谱仪缺少一种统一、可靠的标定方法的问题,本文提出了一种基于移动最小二乘法的微型光谱仪标定方法,相比传统的最小二乘法多项式拟合方式,移动最小二乘法可以灵活地选取不同阶的基函数改变拟合精度,选取不同的权函数改变拟合的光滑度。首先,微型光谱仪标定中,本文提出同时使用汞氩灯和氖灯标定可见波段微型光谱仪,获得均匀覆盖的特征谱线。然后,经过小波去噪之后,高频噪声信号得到明显地去除,使用峰值寻峰法可以准确地找到所有的特征峰所对应的像元位置。最后,选取一组特征谱线作为标定集,使用移动最小二乘法对微型光谱仪做标定;选取一组未参与标定的谱线作为测试集,进行误差分析。由实验可以得出:基于移动最小二乘法拟合标定后,标定集的误差标准差为0.136 nm,测试集的误差标准差为0.192 nm,拟合优度为0.999 3。本文提出的标定方法和传统的最小二乘法三次拟合标定方法比较得到:标定集误差标准差减小了0.026 nm,测试集误差标定差减小了0.047 nm,标定结果具有较高的稳定性,在实际工程应用中具有重要的指导意义。


4 MLS标定关系建立

5 实验分析
5.1 标定实验设计
5.2 标定集特征点选取

5.3 标定结果及对比分析


6 结论
