新型电动清雪破冰车车身结构设计与研究
2020-06-03马士伟
马士伟
(烟台汽车工程职业学院汽车工程系,山东 烟台 265500)
目前,随着我国工业化水平迅速提高,大量机械设备已被用于城市主干道的除雪破冰,但这些机械设备一般体积较大,产生的噪声大,尾气也多,不适于小区、校园的除雪破冰。国内针对小区、校园等区域的清雪破冰装置主要有手推式、液压式、微波式3种,其中手推式结构简单,但自动化程度不高,劳动强度大;液压式操作方便,但结构复杂,悬挂不便;微波式清雪破冰操作方便,但难以清除干净。这3种方式都采用轮式结构,动力设备是汽油机,在进行清雪破冰过程中,尤其在有坡度的路面,既容易打滑,也无法有效避障,还有尾气污染环境。国外针对除雪破冰机的研究主要集中在自动控制方面,很少涉及集除雪、破冰为一体的结构改进。近年来,由于社会对冬季道路养护的需求越来越多,各类除雪机的保有量在发达国家迅速增长,在性能方面也朝着自动化和一机多能方向发展[1]。
新型电动清雪破冰车的研究就是遵循国内外除雪破冰的发展趋势,克服相关的缺点,同时考虑设备应用路面的工况问题。小区、校园等区域的路面情况普遍较好,但也存在少部分上下坡路段,即使在工况良好的冰雪路面上运行,设备也存在打滑等安全问题,而设备在小区、校园等路面上运行首先要考虑的是安全,其次是环保,因此车身采用履带式行走机构。履带式行走机构能够跨越较大的障碍,不易打滑、转弯方便、运行平稳,同时采用蓄电池为设备提供动力。新型电动清雪破冰车的预期是能够实现电力驱动,在冰雪路面上能够灵活跨越障碍,转弯方便,运行平稳,使人在进行清雪破冰时,工作更加舒适,在提高工作效率的同时,还能保护环境。
1 车身整体方案设计与工作原理
1.1 整体方案设计
按照上述要求,对设备的总体结构进行了设计,总体长度2 013 mm、履带长度870 mm、破冰机构宽度800 mm、除雪机构宽度700 mm、总体质量200 kg,并绘制了总装配图,如图1所示。

1—车身;2—破冰机构;3—除雪机构;4—执行操纵机构
根据课题的研究进度及篇幅所限,文章主要对车身的总体设计与研究进行阐述。
1.2 车身结构及工作原理
1)设备的行走方式。本设备采用履带式行走机构,使清雪破冰车在冰雪路面上运行更加平稳、能够跨越障碍、制动迅速,保障了车辆运行过程中的安全,履带式行走机构由驱动轮、履带、支撑轮、导向轮等组成,位于整体结构的两侧[2]。
2)车架机构。车架是用来承载各种零部件的,既要保证其强度,又要保证车身质量不能太大。在设计过程中,采用SolidWorks等软件对车架机构中重要的零部件进行应力分析,使结构更加优化。
3)底座机构。底座机构与车身通过圆柱销相连,方便拆装。人既可以坐在底座上操作设备,也可以在行走中操作设备,使得设备的操作更加方便[3]。
4)动力部分。本设备采用电力驱动,由电池(1个60V25Ah电池组)、电机(1个QSMOTOR.WP60030/60V电动机)等组成,既保护了环境,又节约了能源。
为了满足清雪破冰车车身结构总体设计要求,设计的总体原理方案如图2所示。
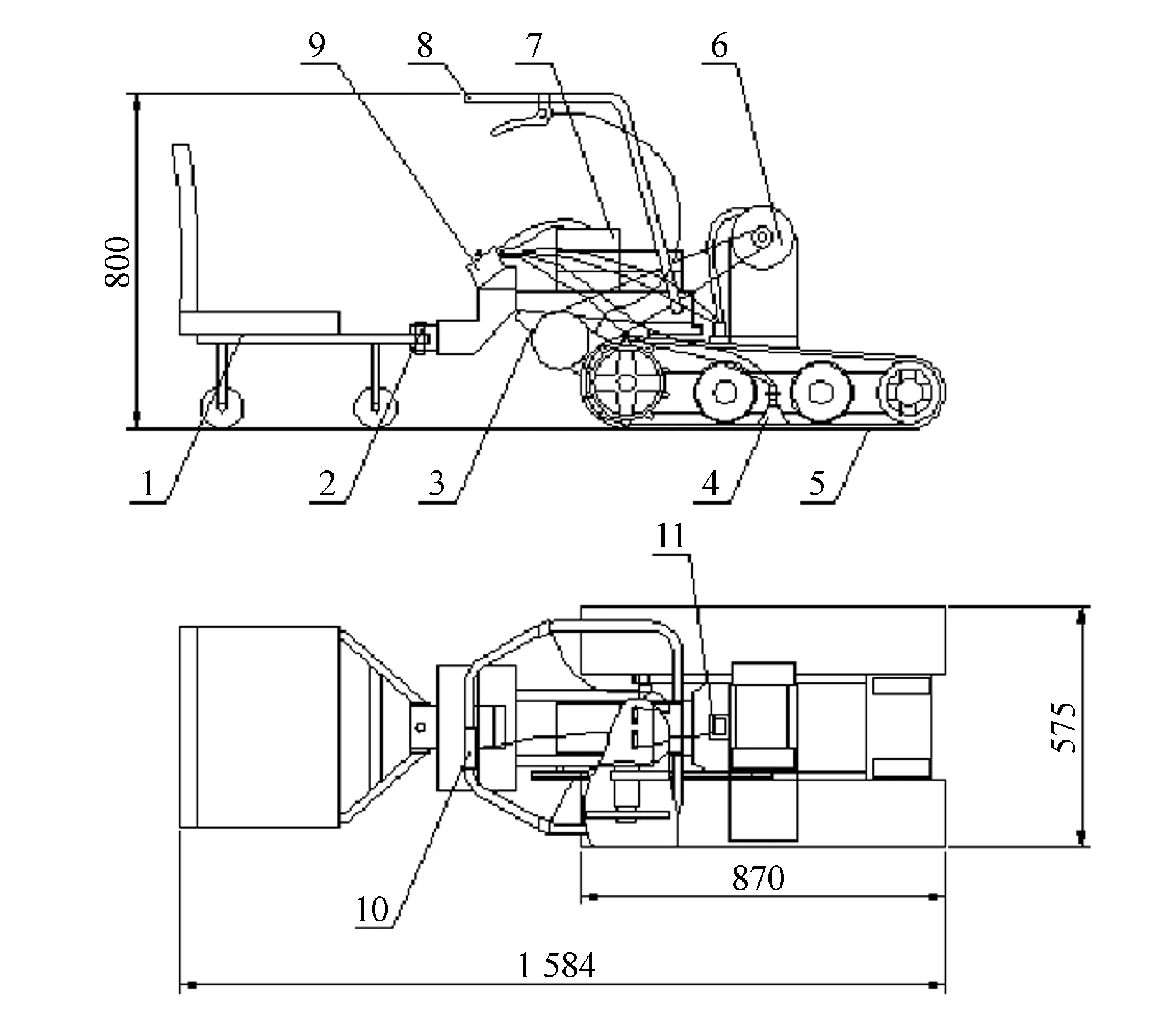
1—底座机构;2—连接销;3—变速箱;4—辅助刹车机构;5—履带机构;6—电机机构;7—电池组;8—车架;9—开关;10—动力控制把手;11—转速控制器
如图2所示,底座机构1位于整体结构的后方,通过连接销2与车架8相连,变速箱3位于车架8的后方,辅助刹车机构4位于履带机构5的内侧,并与车架8的纵梁相连,履带机构5位于整体结构的两侧,电机机构6位于车架8的中部,电池组7位于变速箱3的上方,开关9位于车架8的下侧后方,动力控制把手10位于车架8的上方,转速控制器11位于车架8的中部、电机机构6的左侧。
在进行清雪破冰工作时,人坐到底座机构1上,打开开关,转动动力控制把手10,在转速控制器11的作用下,调节电机机构6的转速,此时电机机构6通过变速箱3带动履带机构5运行,并控制设备的运行速度。如需人行走操作,将连接销2拆下,使底座机构1与车架8分离即可。
2 车身主要零部件的设计与分析
2.1 车架
车架为车身的支撑部件,由底盘、扶手架、连接架、变速箱等组成,设备的大部分零部件要安装在底盘上,两侧安装履带机构,中间安装有电机机构、支撑机构,前端安装有除雪机构、破冰机构,为了更好地保证机构的刚度,同时减小设备的质量,底盘采用2 mm厚钢板,并将其制作成深度为40 mm的槽钢。扶手架用来操控设备的运行,由钢管弯制而成。电池支架上方放置电池,下方安装有变速箱,使整体结构更加紧凑。车架与底座机构通过连接架及连接销相连,便于拆卸,开关位于连接架的上方,使操作者方便操作设备,如图3所示。
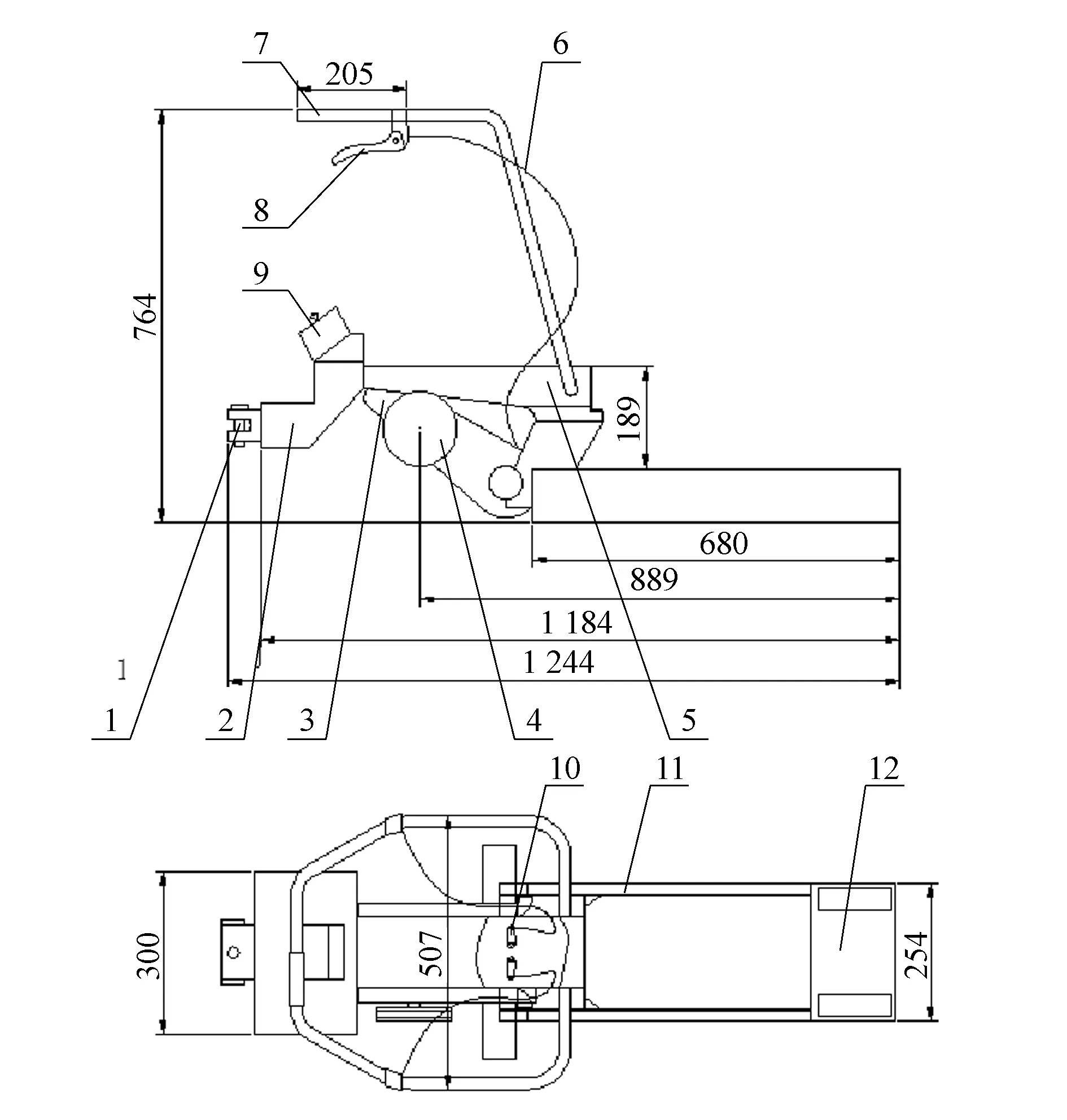
1—连接销;2—连接架;3—变速箱;4—变速箱带轮;5—电池支架;6—拉线;7—扶手架;8—转向把手;9—开关;10—离合器控制板;11—底盘;12—前梁
1)变速箱采用双离合结构,位于电池的下方,通过联轴器与左右两侧的驱动轮相连。离合器控制板通过拉线与两个转向把手相连,当设备需要向右转弯时,按下右侧转向把手,通过拉线拉动右侧离合器控制板,此时右侧的履带机构停止运行,左侧履带机构继续运行,设备向右转向,需要左转弯时,将左侧把手按下,设备向左转向。
2)底盘起主要的支撑作用,为了保障其强度,同时减小底盘的质量,选用槽钢焊接而成。底盘的中间安装有横梁,横梁为直径40 mm的钢棒,与支撑轮相连,纵梁与横梁之间采用二保焊焊接。电池组、变速箱位于底盘的后侧,电机机构位于底盘的中部,除雪机构、破冰机构位于底盘的前侧,履带机构位于底盘的两侧。底盘的中间部位承受的力最大,即钢棒与槽钢的焊接处,约为800 N。为了更好地对底盘结构进行校核,使设计更加优化,用SolidWorks软件对底盘进行了三维建模,在三维建模的基础上,对底盘纵梁、横梁焊接处进行应力分析,并生成了应力云图,如图4所示。
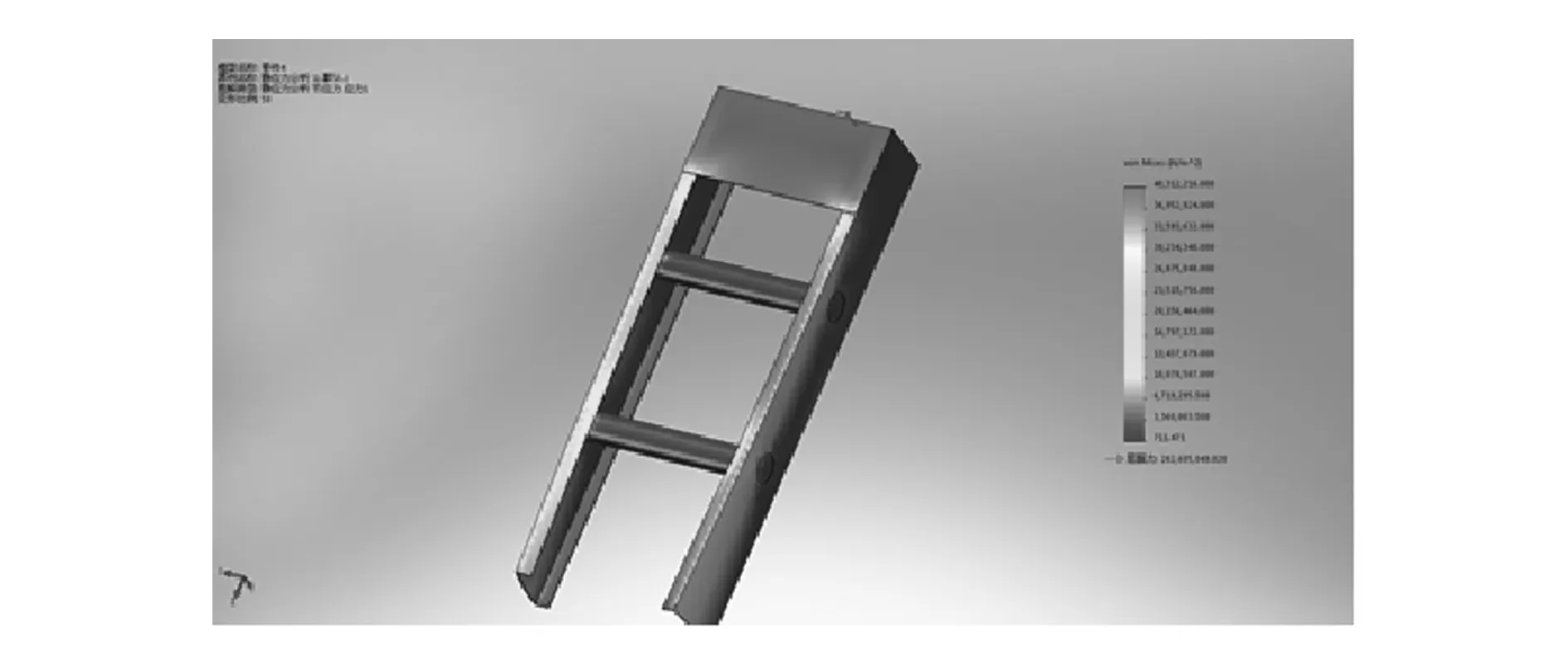
图4 应力云图
通过对应力云图进行分析可知,应力最大处为横梁与纵梁连接孔处。为了更好地分析连接孔的受力情况,对孔的边缘进行了应力曲线分析,其边线图解如图5所示。

图5 边线图解
在对底盘重要部位进行应力分析后,对其安全性进行了分析,确定出了安全系数,如图6所示。
根据材料力学第四强度理论对底盘进行应力分析以及安全系数的计算,得出von Mises应力云图及安全系数,底盘的主要材料是2 mm普通钢板制作的槽钢及圆柱棒料,其屈服应力为282.685 MPa。根据上述分析可知,在外力作用下底盘最大应力位于纵横梁相交的孔,其应力值为40.312 MPa,安全系数为7,底盘强度合理,而且还有进一步优化的空间。
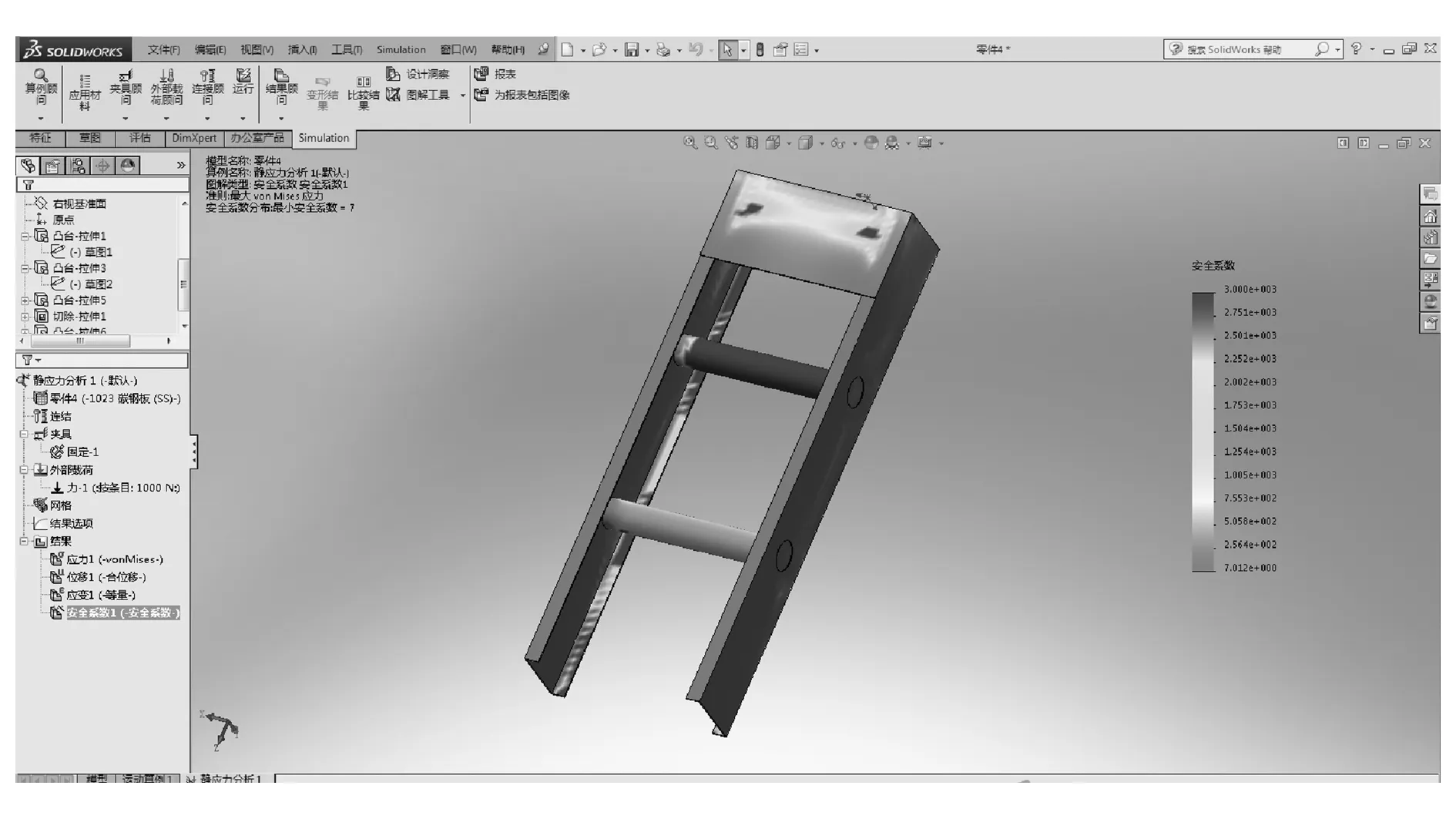
图6 安全系数图
2.2 底座机构
为了使清雪破冰工作较为舒适,实现连续作业,并提升工作效率,在设备中设计了底座机构[4]。底座机构由底座、底座架、底座轮组成。笔者主要从稳定性、安全性、操作性等方面进行底座架设计,底座架为类三角形结构,底座轮共3个,在底座架后侧2个,前侧1个,同时从人机工程学的角度将座椅靠背设计为带弧形且倾斜角度为100°,底座架的前端通过连接销与车架相连,如图7所示。
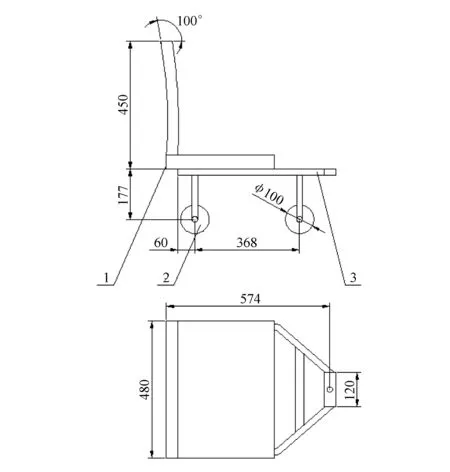
1—底座;2—底座轮;3—底座架
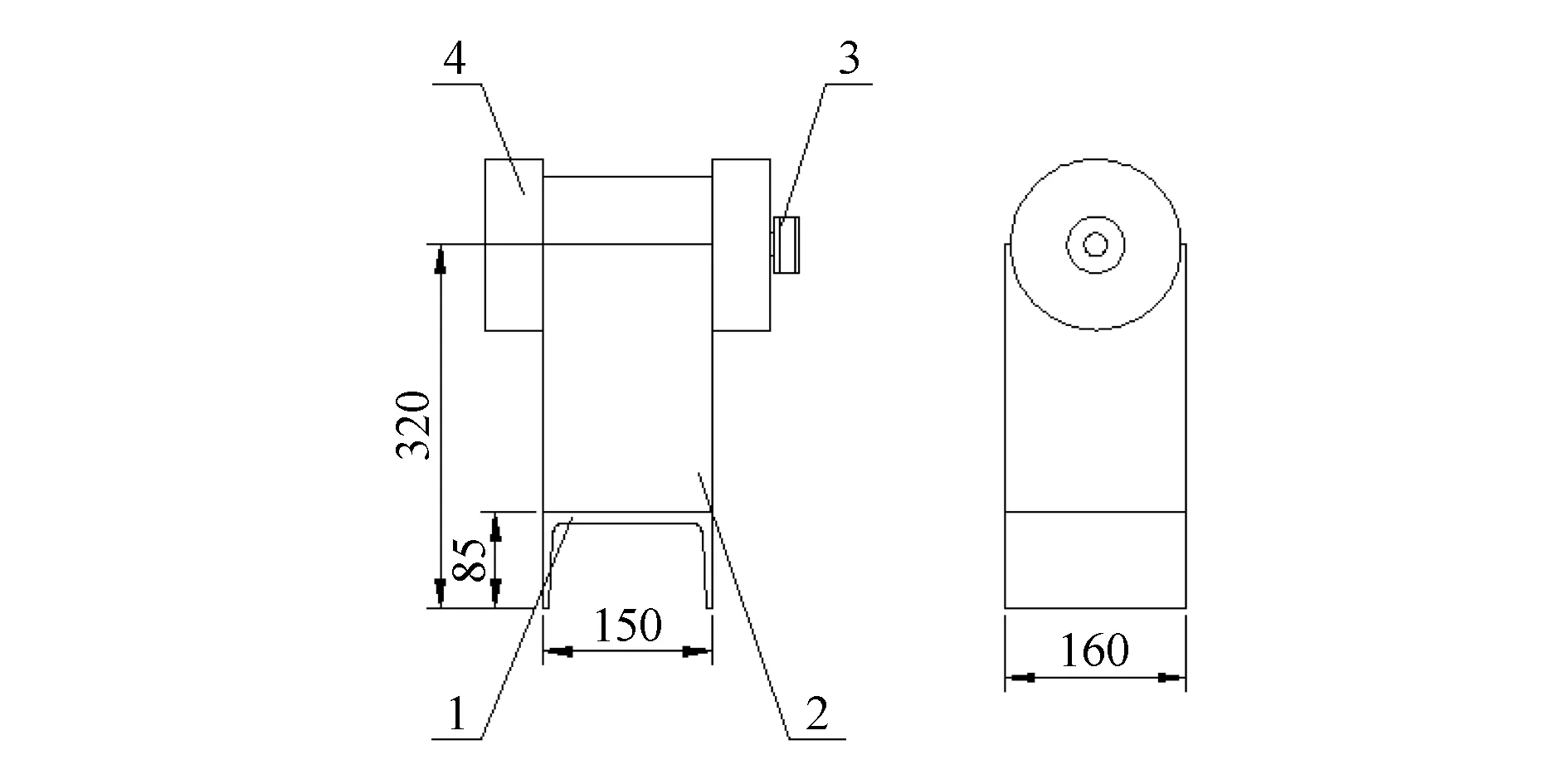
2.3 行走机构
设备采用履带式行走机构。相对于轮式机构,履带机构可以使设备在冰雪路面上运行更加平稳,并可以跨越较大障碍,同时由于履带与路面的接触面积大、摩擦系数大,只要动力断开,设备就可以平稳停在路面上,尤其是在坡道上,效果更加明显,因此对于人流比较多的居民区、校园等区域,采用履带机构更加适合。
履带机构由驱动轮、履带、支撑轮、导向轮等组成,位于底盘的两侧。根据履带机构设计原理,为实现在冰雪路面上安全、平稳运行,整体采用倾斜结构,驱动轮的直径为208 mm、导向轮的直径为150 mm,倾斜角度为4°,其中驱动轮通过联轴器与变速箱相连,如图8所示。履带采用轮齿式橡胶履带(CRT),为与驱动轮相配合,有两个支撑轮位于履带的中间部位,导向轮位于履带的前侧。当设备运行时,由变速箱带动驱动轮,如图8所示。

1—驱动轮;2—支撑轮;3—履带;4—导向轮
2.4 辅助刹车机构
为了使设备在冰雪路面上实现快速制动,操控更加方便,设计了辅助刹车机构。辅助刹车机构由锥形块和电磁阀组成,锥形块的材料为橡胶,位于电磁阀的端部,如图9所示。辅助刹车机构整体位于履带机构内部,两个支撑轮之间,安装在车架底盘的纵梁上,电磁阀通过开关与电池组中一块12 V电池相连,电磁阀处于常开状态,当打开开关通电后,电磁阀闭合,将锥形块抬起,此时设备运行,当关闭开关后电磁阀回到常开状态,此时锥形块与履带内侧紧密贴合,起到辅助刹车的作用。
2.5 破冰载荷分析
本设备的主要作用是除雪破冰,相较于除雪机构,破冰承受的载荷更大,因此本文对破冰载荷进行分析计算。
1)冰层分析。
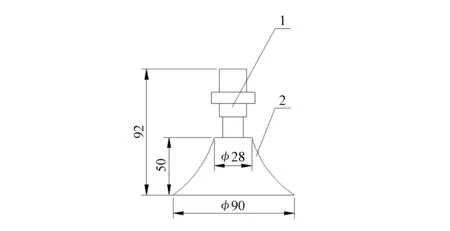
1—电磁阀;2—锥形块
小区、校园的冰层厚度一般不超过1 cm。冰层坚硬,但破断强度低,酥脆易碎。由于冰层和地面紧密贴附,因此难以使冰层发生纵向变形,同时为了防止对路面造成损伤,破冰钉的刃部相对于路面要有一个倾斜的角度,即可以用刀刃切入的方法促使其横向变形,随切入深度的增加,刃部的楔形截面产生挤压作用,促使冰层发生横向位移和变形,进而产生脆性断裂、破碎、剥离[5]。
2)破冰载荷计算。
本设备的破冰机构由紧固板、连杆、带轮、破冰棒(带破冰钉)、拉杆、转动销等组成,其整体宽度为700 mm,破冰棒长度为640 mm,整体长度612 mm,高度为348 mm,如图10所示。在我国北方地区的居民区、校园路面等区域的冰层厚度多为5~10 mm,破冰钉的长度为8 mm,在破冰棒上密集排列。连杆位于破冰棒两侧,前端通过转动销与破冰棒相连,后端通过转动销与紧固板相连,可以使破冰机构实现上下转动,带轮位于破冰机构的右侧[6]。

1—紧固板;2—连杆;3—带轮;4—破冰棒;5—拉杆;6—转动销
破冰棒上的破冰钉作用在冰面上的力主要为压力与剪力,由此可知,施加在冰上的压应力不小于1.461 MPa,剪应力不小于10.2 MPa,由此得:
(1)
式中:σ为破冰压应力;F2为破冰压力;S为切削刃面积,S=1×10-4m2;σT为许用压应力,σT=1.461 MPa。由式(1)可求得F2≥0.15 N。
(2)
式中:τ为破冰剪应力;F1为破冰剪力;A为冰层面积,A=4×10-4m2;τt为许用剪应力,τt=10.2 MPa。由式(2)可求得F1≥4 N。
在压力与剪力的共同作用下将冰层打碎,碎块的尺寸不大于20 mm,便于收集。
2.6 动力部分
设备采用电力驱动,整个动力部分由电机机构、电池组、转速控制器组成。
1)电机机构。
电机机构是设备的动力机构,为设备提供动力。电机机构整体位于底盘的中间部位,由电机、支座、带轮等组成,如图11所示。电机通过带轮、皮带与变速箱相连,控制履带机构的驱动轮,传动比为2.74,并采用槽钢、凹形支座放置电机。
1—槽钢;2—凹形支座;3—带轮;4—电机
清雪破冰车的总质量在200 kg左右,人的质量约为80 kg,设备行走速度为20~30 km/h。设备通过电池、电机提供动力,电机除了为行走机构提供动力,同时还为破冰机构提供动力。根据上述参数对电机的功率进行初步计算,其中橡胶履带与路面的摩擦系数f=0.03~0.04,由此求得电机功率为0.47~0.93 kW。
据此本设备选择的电机型号为QSMOTOR.WP60030/60V,额定功率为1 kW,额定转速为3 000 r/min。
2)电池组。
根据所选电机,设备选用60V25Ah电池组(采用额定电压为12 V的5块电池串联,放置在电池支架上方,两个电池组并联的方式)为设备提供电力[7]。
3 车身样机的实验分析
3.1 样机实验
根据上述设计与分析,车身结构除底座机构外已制作完成,其基本尺寸为长1 274 mm、宽575 mm、高800 mm,车身样机总质量100 kg。车身样机实物如图12所示。

图12 车身样机
3.2 实验数据及分析
用已经制作完成的车身机构样机进行了实验,得出的相关数据见表1。
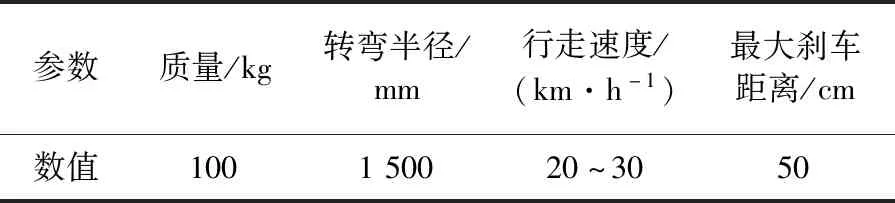
表1 样机实验数据
设备扶手架的高度为800 mm,方便人进行操作,在运行过程中,通过动力控制把手、转速控制器可以实现无级变速,使设备操作更方便,行走的最大速度为30 km/h,保证了工作效率。刹车时,在辅助刹车机构的配合下,水平路面上的刹车距离≤20 cm,在坡度为10°的倾斜路面,下坡时的刹车距离≤50 cm,上坡时设备刹车后的下滑距离≤10 cm。设备可以在不同地形、地貌运行,可以跨越较大障碍,还可以攀爬楼梯,运行平稳。设备通过转向把手实现转弯,转弯半径≤1 500 mm,可以在较窄的路面上进行调头操作。车身在调头时,其运行轨迹与理论上的轨迹有一定偏差,分析其主要原因为履带机构的驱动轮与车架连接的孔在加工时有一定的误差,需要进行进一步的误差修正。
4 结束语
新型电动清雪破冰车车身样机的实验表明,因为采用电力驱动设备,所以噪声较小、无尾气排放,实现了节能、环保的设计目的。设备采用的履带式行走机构,可以跨越较大障碍,能在不同路面上平稳运行,尤其在有坡度的路面上,克服了传统轮式机构运行不稳、刹车不便的情况。样车采用的双离合变速箱,使得设备转弯、调头更加方便,转弯半径≤1 500 mm,可以在较窄的路面上进行转弯。由此可知,车身样机已基本达到了设计要求,后续将对底座机构、除雪机构、破冰机构以及其他辅助机构按照设计要求制作试样,在整车装配、调整后进行整车实验。
