基于DSP和CAN总线的大载质量运输设备电制动器优化设计
2020-06-03郭保华任继鹏刘晓磊马雁卿
郭保华,任继鹏,刘晓磊,张 崭,马雁卿
(1.青岛市工程咨询院,山东 青岛 266071)(2.青岛新纪元能源安全技术有限公司,山东 青岛 266071)
随着现代集成电路及信息技术的飞速发展,数字信号处理器(DSP)的应用范围越来越广。DSP是一种可以快速处理数字信号的微处理器,一般与CAN总线进行匹配。CAN总线在实时通信中起控制作用,在与DSP匹配时可以作为其外部集成的连接设备[1]。
CAN总线具有很多优点,包括数据传输速率高、传播距离远、利用率高、抗干扰性好等,将DSP和CAN总线结合应用于大载质量运输设备的电制动器优化中,具有良好的应用效果。大载质量运输设备能够轻松实现散装货物的自动倾卸,是众多物流运输设备中被广泛使用的车辆之一。本文基于DSP和CAN总线设计电制动器结构,对大载质量运输设备的电制动器进行优化,包括对内嵌DSP结构的优化和对CAN总线结构的优化,并对相关的集成性能进行优化,从指令制备和指令传输两个方面,提高制动器的制动效率,降低制动延迟[2]。
1 基于DSP和CAN总线的运输设备电制动器优化
为提升大载质量运输设备的制动效率,对其电制动器进行优化设计。本文设计的电制动器主要用于外形尺寸为长9.6 m×宽2.3 m×高2.7 m、实际载质量为25 t、货箱容积为60 m3的大载质量运输设备。所设计的电制动器包括制动架、制动件和控制系统等,其中控制系统由DSP和CAN总线组成。DSP作为终端分析控制器,能够快速处理所接收的指令,提高指令传输的速率;CAN总线是保障数据传输的通信网络,对其优化能够提升制动信息的传输效率,降低大载质量运输设备的制动延迟。
1.1 内嵌DSP结构优化
对DSP的复位功能进行优化,添加型号为MAX1852的电子元件作为DSP运行的检测装置,当大载质量运输设备的运载程序输出出现异常时,使DSP及时复位。DSP内部有2 785个逻辑资源区用于处理所接收的指令[3]。DSP结构如图1所示[4]。
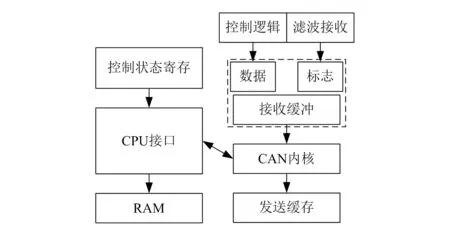
图1 DSP结构图
DSP可分为消息控制和CAN总线内核连通两个部分,其中消息控制部分主要包括:
1)CPU接口。负责与电制动器控制系统接口通信,完成数据调配和管理,包括对运输设备电制动器内部时钟和管控信号的管理,同时负责CAN总线数据的存取[5-6]。
2)控制器逻辑状态寄存器。利用CAN总线内核管控方式,可以标注当前DSP工作状态,根据设定的逻辑状态对当前电源进行终端控制。
3)消息存储RAM。DSP内置多个可存储信息的缓存空间,用于接收、存储、发送信息,也可以作为普通的存储空间使用[7]。
4)信息滤波电路。接收数据报文标识并进行分析,判定是否进行报文接收。
DSP的内核结构[8-9]如图2所示。

图2 DSP内核结构
优化设计后的DSP内核采用哈佛总线数据结构,改变了传统的数据混杂,其内部程序和数据完全隔离,互不干扰。DSP在梳理指令时,其寄存器地址和数据地址均需要首先进行指定空间映射,然后通过CAN总线进行访问控制[10]。
优化设计后DSP指定地址映射如图3所示。
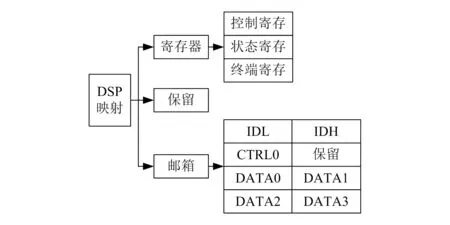
图3 DSP指定地址映射
1.2 CAN总线结构优化
优化后的CAN总线结构分为三层,即物理层、应用层、数据链路层,其协议为CAN2.0S协议,层次结构如图4所示。
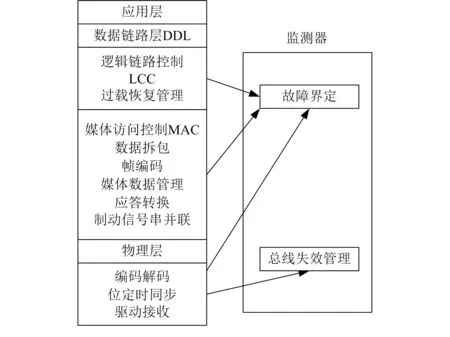
图4 优化后CAN总线层次结构
因对CAN总线层级进行了优化,故需要对当前CAN总线的帧格式和类型进行优化升级。在CAN2.0A总线协议中,根据DSP指令标识的长度,将当前总线帧格式分为标准帧和扩展帧,其中标准帧包括11个总线标识符,扩展帧包括29个总线标识符。
在总线数据传输和网络通信中,将DSP指令数据打包成帧格式,可以加快运输设备电制动器的指令传输。优化后的CAN总线报文依靠多种帧类型进行数据传输,具体包括远程帧、数据帧、过载帧、错误帧,远程帧和数据帧由帧间隔进行隔离。各帧的具体用途见表1。

表1 CAN总线帧的用途
数据帧由7个不同的部分组成,分别为帧起始、仲裁场、控制场、数据场、应答场、CRC(冗余数据循环校验)场、帧结尾。
CRC由CRC序列和CRC标定序列两部分构成,可以对当前CAN总线格式下的DPS冗余数据进行载荷检验,判断其是否具有明显错误。设计的CRC校验格式为:
M(x)×Xn=Q(x)×G(x)×R(x)
(1)
式中:M(x)为当前DSP传输的电制动器原始信息格式;Xn为当前DSP传输的码字长度;Q(x)为校验多阶数据项式;G(x)为当前预设的多阶数据项式;R(x)为数据项式的冗余项。在实际控制中,DSP数据原始信息后缀会添加当前n位项式数据项R,在接收到数据M和数据项R以后,检验其是否可以被G(x)整除,如果可以则直接接收,反之则判断数据为错误数据。
CAN总线错误帧由错误标志和错误界定符构成,其中错误标志又分为主动和被动两种。当CAN总线检测出制动信息传输错误时,将会触发主动标志,这一标志会影响应答场和帧结尾实际填充规则,从而使CAN总线上其他节点检测到当前错误标志。主动错误标志有6个不同的数据显性位。过载帧主要由过载标志和过载界定符构成。
在实际工作中,CAN总线接收节点会出现远程帧数据延迟,过载帧能保证节点不会出现错误帧,同时确定CAN总线计数器不会出现变化。帧间空间主要用于间隔远程帧和数据帧,由间歇场和总线空闲场构成,其中间歇场主要由3个“隐”位构成。当CAN总线节点处于间歇场时,总线节点无法进行远程帧或数据帧的传输,只能标注超载条件。CAN总线空闲持续时间没有直接要求,只要存在数据报文,均可进行仲裁。
1.3 运输设备电制动器优化
同步机制的核心工作包括CAN总线的位定时、同步机制建立以及CAN总线错误线处理。
位定时即当前CAN总线内单一数据传输的持续时间,在正常速率情况下,如果没有同步处理事件的发生,每秒发送的位数量应是均衡的。CAN总线正常位时间一般为正常位速率的倒数,由以下4个时间段构成,即同步段、传播时间段、相位缓冲器段1以及相位缓冲器段2。同步段主要用于同步当前CAN总线上的各类节点,需要保证当前CAN总线的一个跳变完全同步于此段,并将该段作为一个单位时间长度。确定位定时以后,即可开始建立同步机制。当CAN总线的发送节点和接收节点出现时钟频率误差时,需要建立同步延时调整时序,延时计算公式如下:
(2)
式中:m为同步修正参数;t为CAN总线标称位时间;RSSI为整个带宽上测得的总接收宽带功率;N为总线时间补偿系数,该系数由总线周期率Q确定。根据Q的取值范围,对N进行分段赋值,见表2。

表2 总线时间补偿系数分段结果
在实际同步过程中,CAN总线难免会出现一些错误,所以设计的最后一步即为错误修订。经过数据分析,在电制动器制动过程中,CAN总线协议的错误类型有以下5种:位错误、位填充错误、CRC错误、格式错误和应答错误,不同错误可能会同时发生。
对此,在当前电制动器总线上安装了3种报错状态协议,分别为主动报错状态协议、被动报错状态协议和总线关闭状态协议。主动报错主要参与当前CAN总线的日常制动应用,在出现错误时生成主动报错日志。被动报错主要用于应急性错误日志的生成。总线关闭协议在CAN总线传输制动信息过程中,受到总线长度或节点数增大的严重影响时,关闭数据帧的接收和发送。此外,在CAN协议上添加了两个计数器对当前错误次数进行统计,当CAN总线节点检测到错误时,错误次数计数器将会自动加1,如果发送器检测到位错误,则计数器自动加8,根据计数器数值,电制动器的使用者即可切换错误主动报错状态、被动报错状态和总线关闭状态。
2 仿真测试分析
采用MATLAB软件为仿真实验平台,构建无干扰和有干扰两种不同的制动环境,分别使用优化后的电制动器和优化前的电制动器,在大载质量运输设备0~25 t载质量区间内测试其制动延迟,并对结果进行对比验证。
2.1 无干扰状态下制动延迟对比
无干扰状态下不断加大运输设备的载质量,得到优化前后电制动器的制动延迟曲线如图5所示。
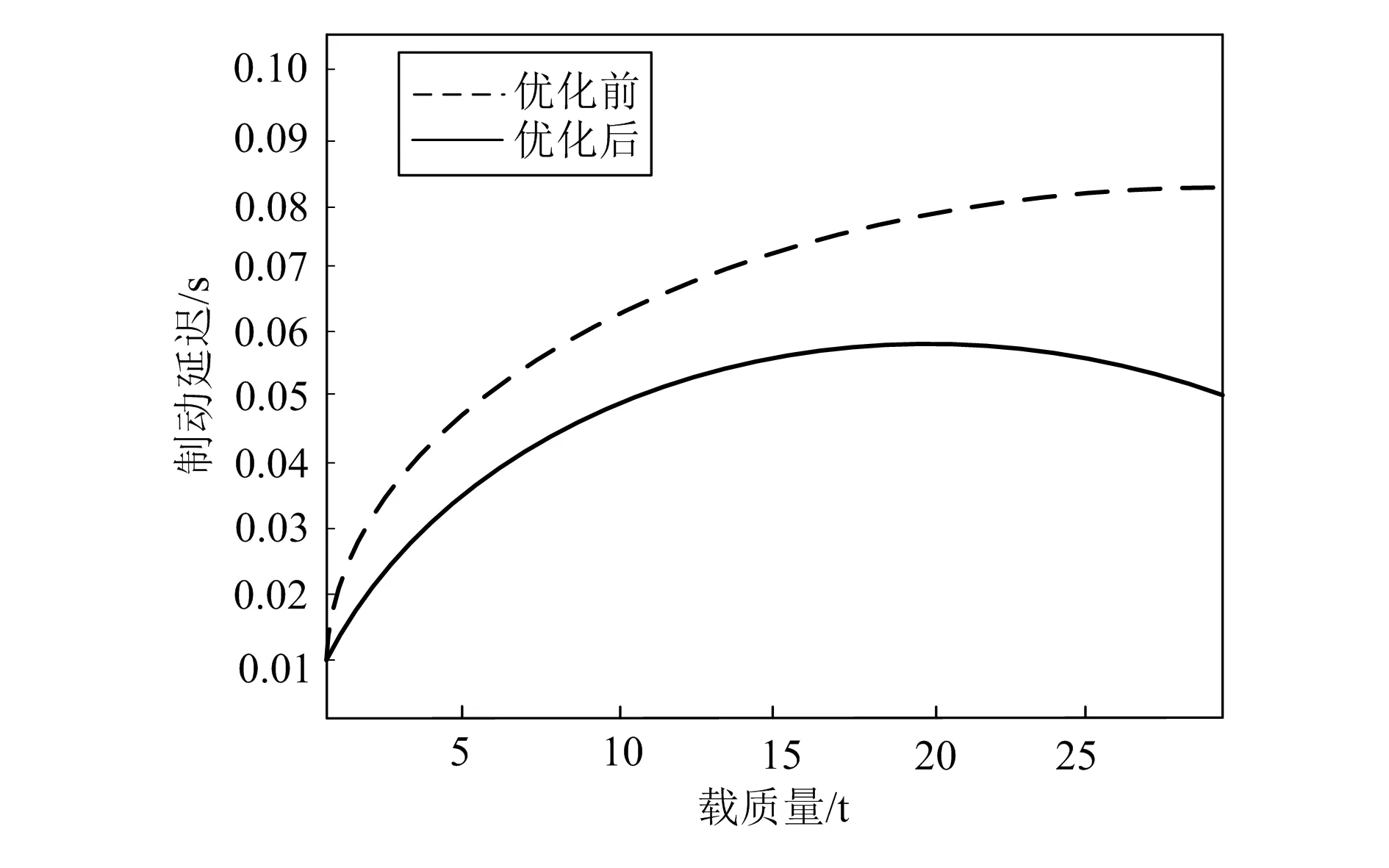
图5 无干扰状态下制动延迟对比
对图5所示的结果进行总结分析,得出无干扰状态下优化前后电制动器的性能指标,见表3。
分析表3可知,在无干扰状态下,优化后的运输设备电制动器的制动延时时间更短,更容易达到稳定状态,由此判定优化后的运输设备电制动器具有更好的延迟控制性能。经过统计,优化后的制动器在正常无干扰状态下制动延迟降低了27%左右。
2.2 干扰状态下制动延迟对比
通过实验验证环境因素或其他客观因素等外界多种因素对大载质量运输设备电制动器制动延迟的影响。实验中设置的干扰量为随机干扰量,对优化前后大载质量运输设备制动器制动延迟的影响如图6所示。
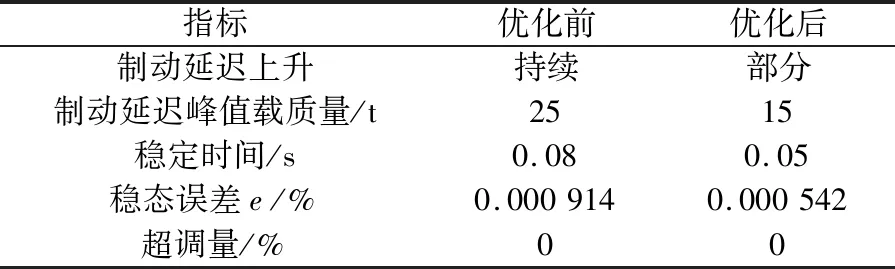
表3 无干扰状态下电制动器性能指标
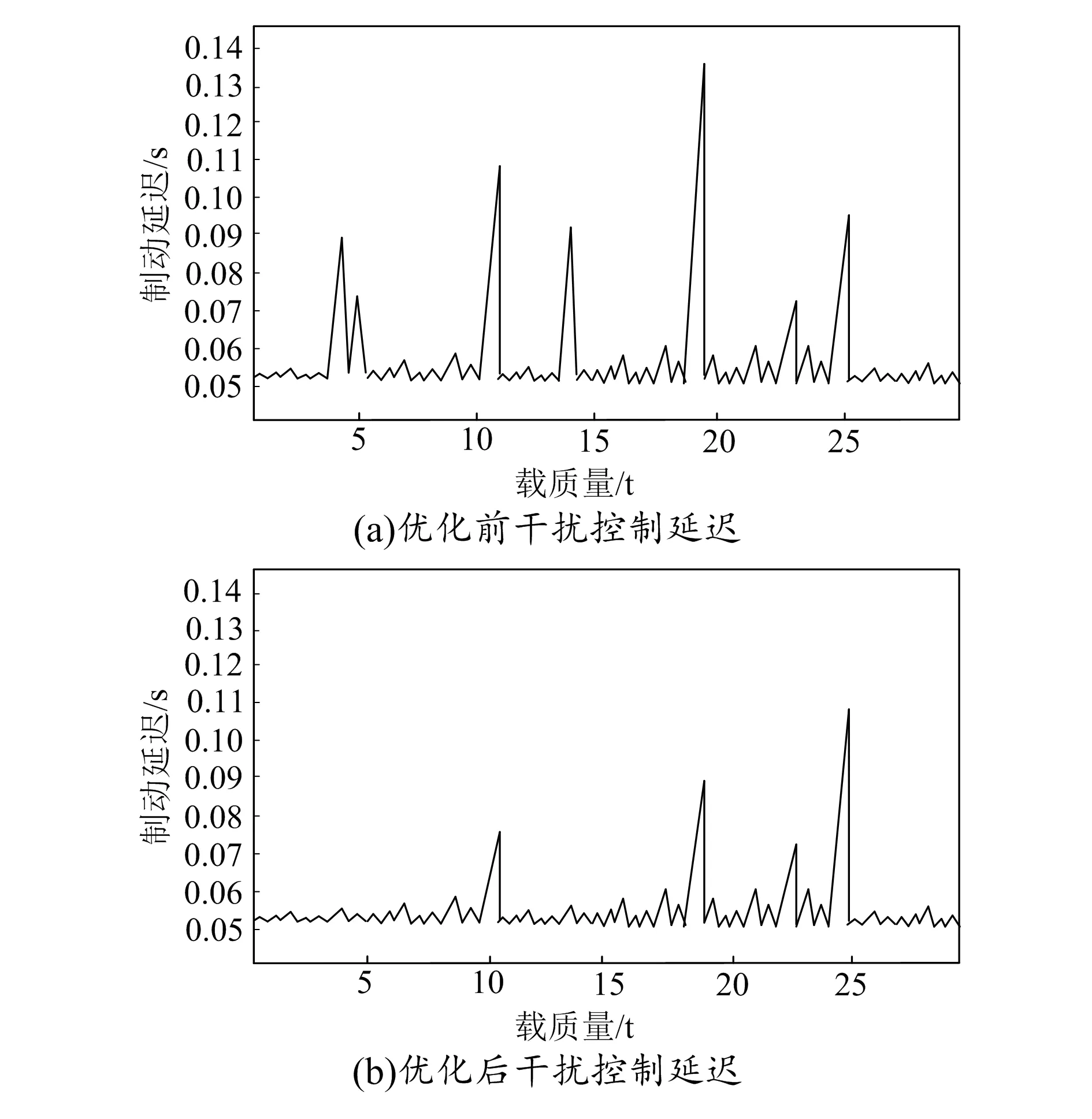
图6 干扰状态下制动延迟对比
分析图6可知,在有外部干扰的情况下,优化前的电制动器在载质量为4,11,14,19,25 t时出现了较明显的制动延迟,最高制动延迟为0.13 s;优化后的电制动器在载质量为10,18,25 t时出现了较明显的制动延迟,最高制动延迟为0.11 s。由此可知,优化后的电制动器抗干扰能力更强,不仅制动延迟波动更小,波动次数也明显少于优化前。经过分析,优化后制动延迟降低了35%,优化效果十分明显。
3 结束语
解决大载质量运输设备存在的制动延迟问题,是确保物流安全的重要手段。本文基于DSP和CAN总线对电制动器进行优化,达到了利于制动指令传输、提高其制动效果的目的。未来将进一步收集有关数据,并对数据进行拆解、分析,以获得不同种类数据的有效特征,实现记忆制动器整体的优化升级。
