带电操作机器人系统在变电房高压柜操作中的应用
2020-06-03邓洁清黄灵通
蔡 榕,任 萱,邓洁清,王 坚,王 松, 黄灵通,郭 强
(1.国网江苏省电力有限公司,江苏 南京 210024)(2.国网江苏省电力有限公司,江苏 镇江 212000)(3.亿嘉和科技股份有限公司,江苏 南京 210012)
随着科技不断进步和电力行业深入发展,电力系统的自动化程度越来越高,变电站也逐渐趋于无人化或少人化[1-2]。目前大部分无人值守变电站采用图像处理技术对现场设备进行巡检识别,实现智能化监控[3-4]。在变电房中,当电气设备由一种状态切换到另一种状态时,需要进行一系列的开关操作,往往需要工作人员抵达现场执行,时间消耗比较多。电网集控中心对开关进行远程操作的需求日渐增加,而自动化变电柜的成本较高,并且更换变电柜需要进行断电处理,会对生产、生活秩序造成影响[5],而操作类型机器人可以实现对变电柜的远程带电操作。目前已有的开关柜操作机器人[6-8]是基于地面小车的移动平台实现的,其体积较大,并且容易受到地面坡度或台阶的影响,因此对操作范围有一定的限制。本文设计并实现了基于轨道运行的带电操作机器人系统,其不受变电房地面环境的约束,可全范围覆盖变电房的工作空间。
1 机器人系统结构概述
带电操作机器人系统由机械臂模块、视觉伺服模块和行走升降模块组成。机械臂模块由末端执行器、俯仰机构组成,行走升降模块由轨道、平移机构、升降机构组成,视觉伺服模块由深度相机和核心算法组成,机器人本体结构如图1所示。
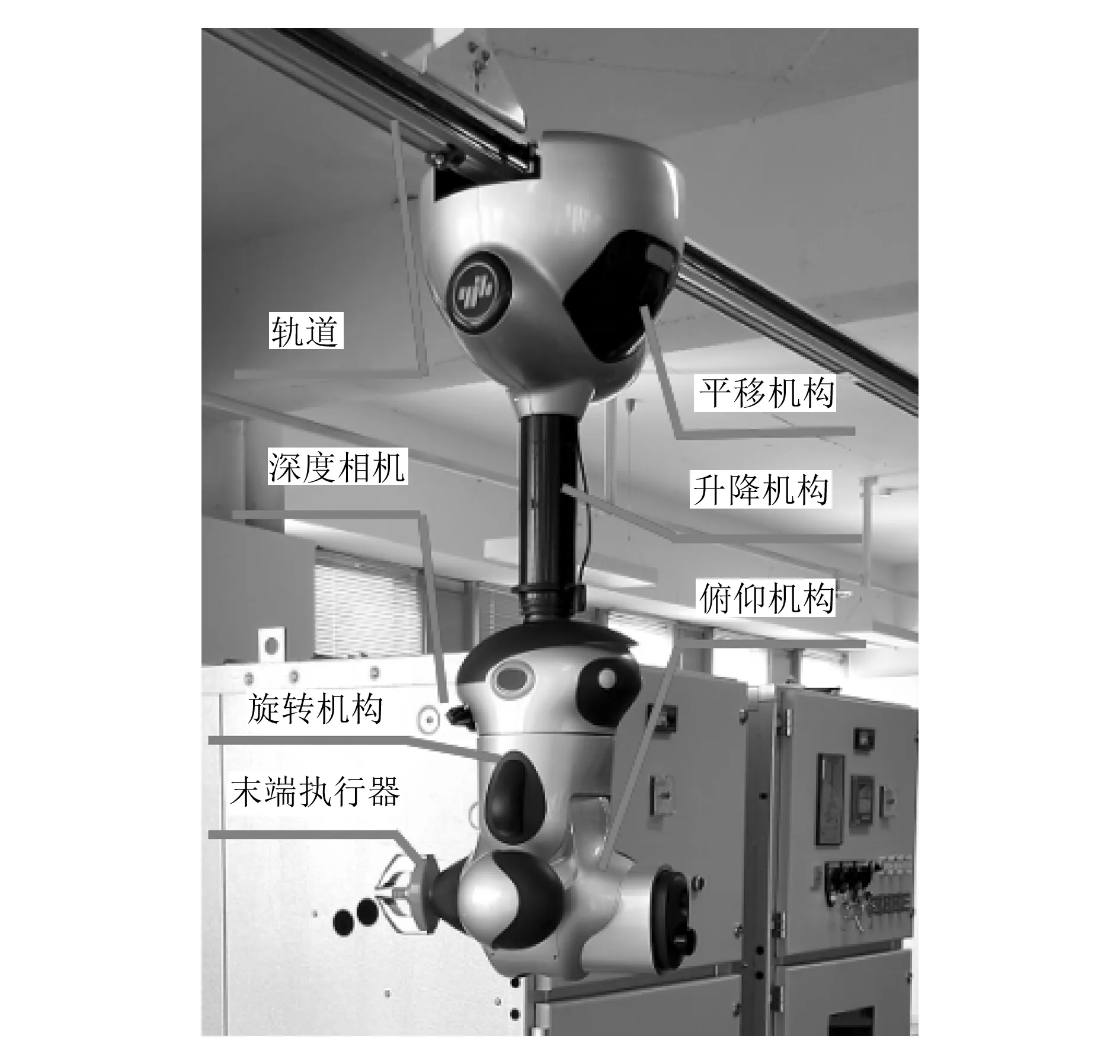
图1 机器人本体结构
带电操作机器人软件系统分为服务端和远程计算机两部分,服务端运行在机器人本体的工控机内,远程计算机放置在集控中心,实现3D运动仿真,还原机械臂运动规划的动作演示。
1.1 机器人系统的软硬件结构
机器人系统的硬件、软件结构如图2,3所示。
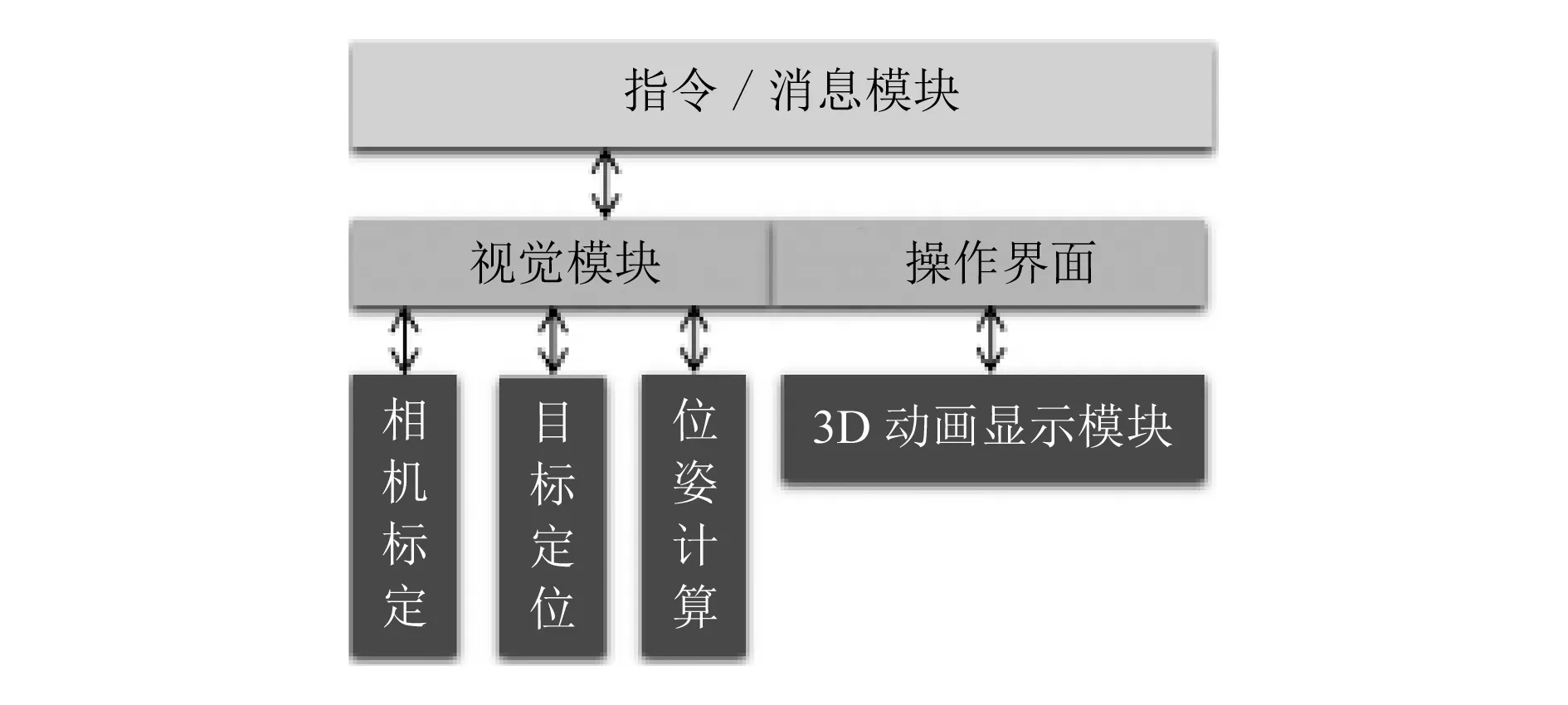
图3 机器人系统软件结构
该机器人系统的操作流程分为6个部分,分别是相机标定、设备建站、初到达、精确定位、执行操作、复位,如图4所示。
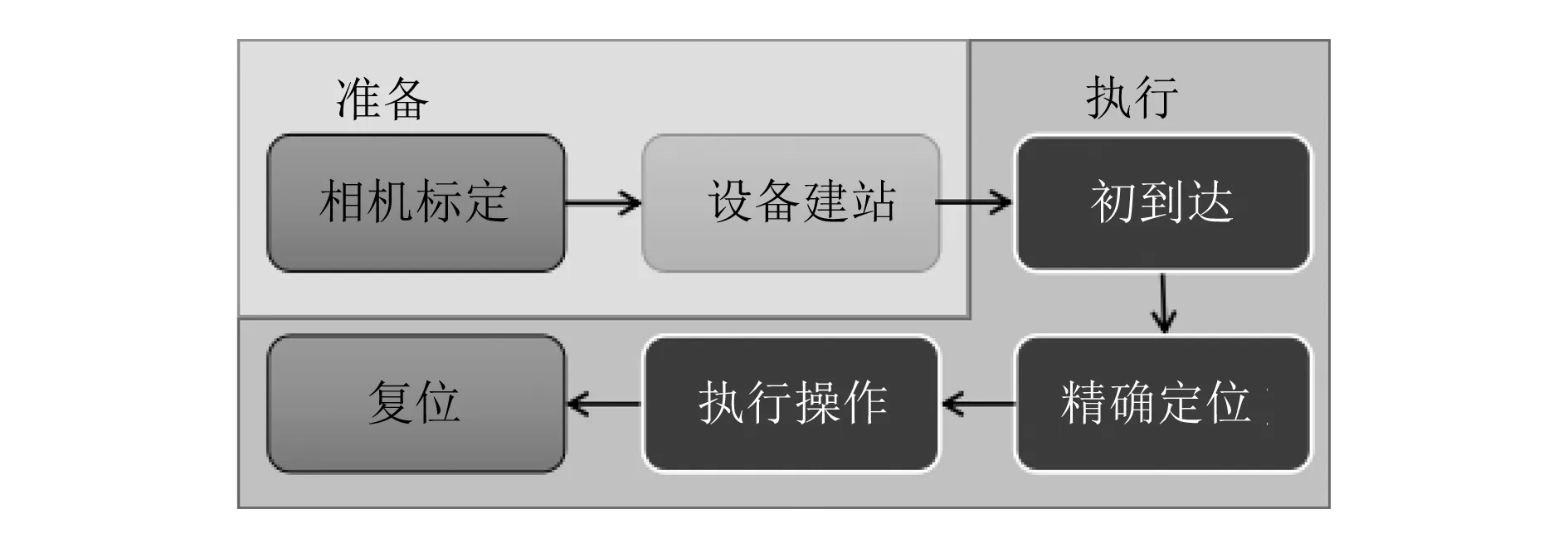
图4 机器人操作流程图
1.2 机器人视觉模块
视觉模块包含了机器人系统的核心算法,负责目标开关的定位识别和手眼标定。目标开关的定位是基于RGB-D传感器返回的可见光图像和深度图像,应用视觉算法识别并计算出目标开关旋转中心的空间坐标。手眼标定目的是将相机坐标系移到机器人坐标系中,构建机器人的空间模型。通过定位标定板,获得相机坐标系与机器人本体坐标系的变换关系,从而将深度相机中获取的目标融合到机器人模型当中。
2 相机标定
相机标定[9]目的是获得相机在机械臂坐标系中的位置,其是机器人手眼协调的关键。由于视觉模块定位的目标位置在相机坐标系下,机械臂无法直接使用定位参数,因此需要通过统一相机坐标系和机械臂坐标系,将定位坐标转换到机械臂坐标系下,作为机械臂操作参数。
本文提出了一种基于三维点云的深度相机标定算法,可在每次任务开始前执行标定任务。相对于传统的依靠硬件测量的方法,该算法更加准确和灵活。
标定板如图5所示。首先在机械臂坐标系下获取标定板坐标位置,将标定模板固定在机械臂前方,测得圆形标记基于机械臂坐标系的空间坐标Lr(x,y,z)。然后计算出圆形标记在相机坐标系中的三维坐标LC(x,y,z)和旋转向量V(α,β,θ),获得围绕x轴、y轴和z轴旋转角度α,β,θ,以及沿3个轴向的平移量tx,ty,tz。α,β,θ,tx,ty,tz为变换矩阵M的旋转平移参数,其增广矩阵形式如下:
M=rot_X×rot_Y×rot_Z×T
(1)
式中:
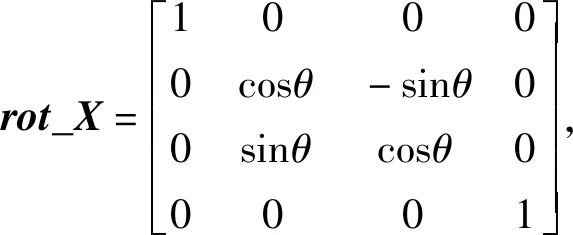
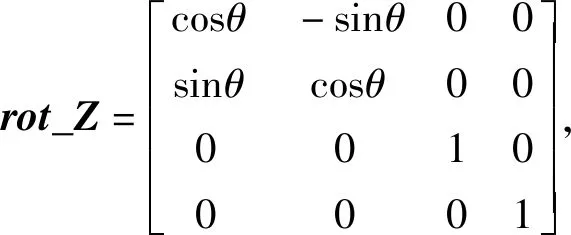
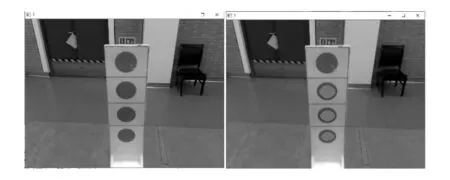
图5 标定板
标定模板采用圆形序列,且固定于机械臂末端执行器上,标定时控制机械臂末端执行器使其到达旋转中点。根据向量垂直方向的偏移角度,测算圆心连线的空间向量,反向校准机械臂的中点参数,实现在线标定。
3 视觉定位算法
带电操作机器人系统通过视觉定位算法[9]计算目标空间坐标和方向,调整手臂末端位姿。
高压柜上旋转机构目标全景图如图6所示,在可见光图像中定位旋钮的位置以及方向向量,其中方向向量由开关的电箱平面拟合获得,经过刚体变换,转换到机械臂坐标系中并传递给机械臂,使机械臂以正确角度抵达目标位置,从而完成操作任务。
模板匹配[10-11]作为常用的目标定位算法,其优点是计算量小,速度较快,能够快速定位模板目标,缺点是受图像质量影响会出现定位偏移的现象。本系统基于模板匹配在算法上做了改进,增加了滤波算法和形态学分析,提高了定位精度和抗干扰能力。
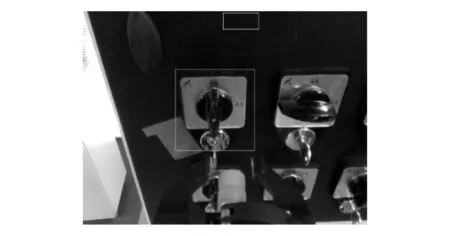
图6 旋转机构目标全景图
3.1 目标定位算法
对旋转机构的定位分为两部分:粗定位和精确定位。粗定位是采用模板匹配的方法,在全景图中定位旋钮开关的大致位置,图6中方框区域为定位的目标区域。粗定位完成后,再进行精确定位。在目标区域中,精确定位旋转目标的旋转中心像素集合,目标定位算法流程如图7所示。
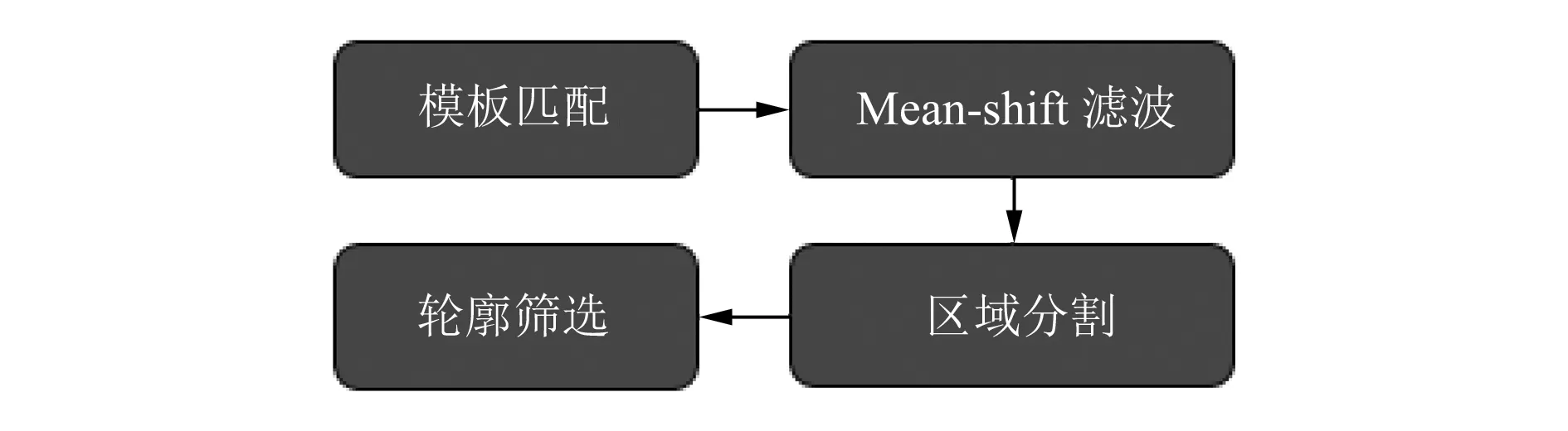
图7 目标定位算法流程图
模板匹配是在一幅图像中寻找一个特定目标,将目标图像作为模板图像,以模板图像为滑动窗遍历图像,计算图像与模板之间的特征距离,找出最小特征距离来定位图像中的目标位置。模板匹配有3种特征提取算法,分别是平方差匹配法、相关匹配法和归一化相关系数匹配法。本系统中使用的是归一化相关系数匹配法,其特征距离R(x,y)的计算公式如下:
R(x,y)=
(2)
其中:
式中:(x,y)为目标图像上像素坐标;(x′,y′)为目标图像上滑动窗范围内的浮动坐标;(x″,y″)为模板图像上滑动窗范围内的浮动坐标;T(x′,y′)为模板像素值;I(x+x′,y+y′)为目标图像区域的像素值;w,h为模板窗口大小。R(x,y)的值域为[-1,1],1表示完美匹配,-1表示糟糕匹配,0表示没有任何相关性。
精确定位是在粗定位的区域内更高精度地确定旋转机构的中心,如图8(a)所示。首先对目标区域采用Mean-shift滤波,将图像中相似模式的像素连通起来,实现低通滤波的效果,再使用漫水法[12]将连通的像素划分为不同的区域,将目标与背景分离出来,如图8(b)所示。将图像中的目标与背景分离后,生成二值图像,如图8(c)所示,寻找轮廓,过滤出符合条件的轮廓,轮廓内的像素点就是候选旋转中心像素点的集合。
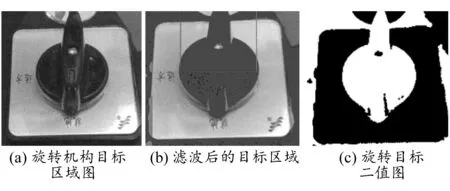
图8 目标检测图像处理过程
3.2 坐标变换
在三维坐标系中,坐标系之间可以通过旋转和平移相互转换,机械臂坐标系与相机坐标系之间的转换关系可以用旋转矩阵R与平移向量t来描述。假设空间中某一特征点P在摄像机成像平面上有投影,则特征点P与其投影点间的关系可以用如下矩阵方程来表示:
(3)
式中:(Xw,Yw,Zw,1)T与(Xc,Yc,Zc,1)T分别为特征点P相机坐标系、机械臂坐标系下的齐次坐标;Q为相机的内参。通过可见光图像与深度图像对应关系,计算旋转中心像素集合中所有像素的三维坐标均值,即旋转中心的三维坐标(Xc,Yc,Zc)。
4 实验结果
将机器人系统部署在站所中,使用备用变电柜进行操作测试,分别对按压和旋转两种类型的开关进行控制测试。按压类型的开关是按钮,旋转类型的开关有分合旋钮、旋转手车、拔插压板3种,以这4种开关作为实验目标。
对每种开关进行了为期一个月的操作测试,每天执行10次任务,每种开关的操作过程如图9~12所示,实验结果见表1。

图9 拔插压板操作过程

图10 分合旋钮操作过程
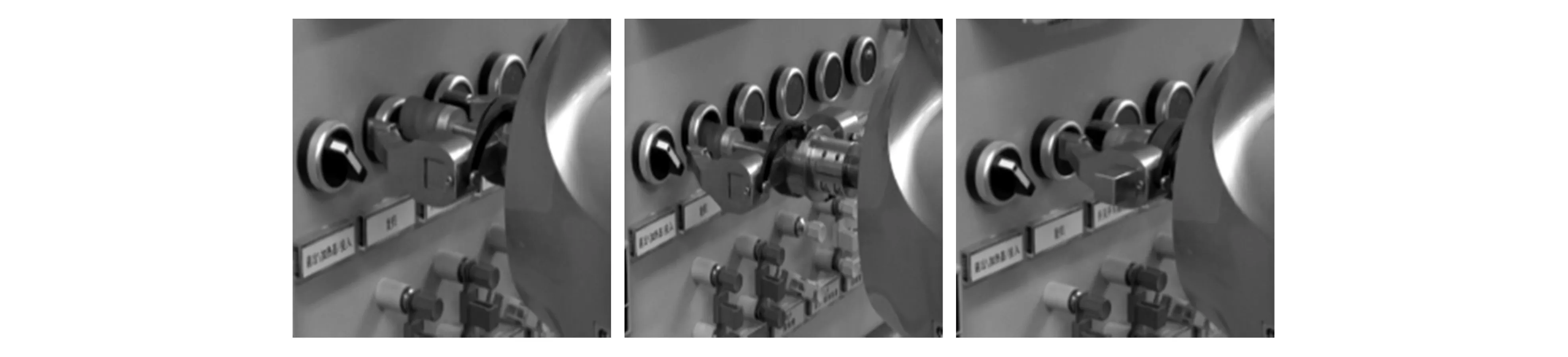
图11 按钮操作过程
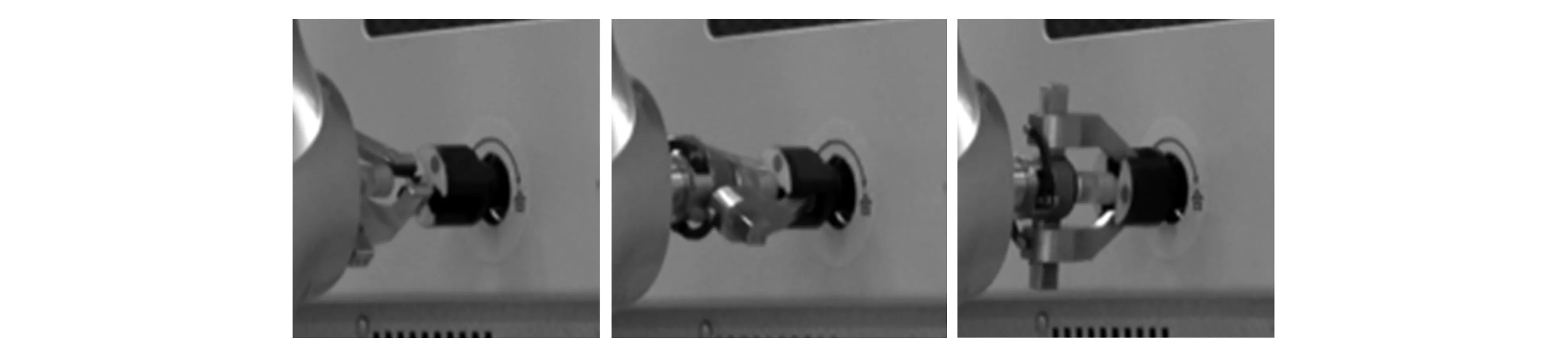
图12 旋转手车操作过程
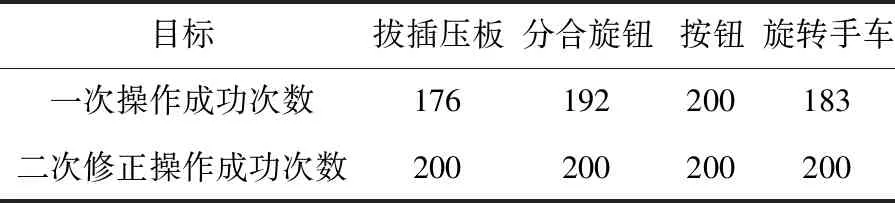
表1 机器人操作开关数据统计
由表1可以看出,机器人系统对按钮、旋钮的操作可以稳定地实现一次性成功,旋转压板和旋转手车的一次性成功率稍低,需要进行二次操作。经过测试分析可知,手爪的操作精度可达到±3 mm,在开关操作的可允许的误差范围内。同时,对未操作成功的任务进行分析可以发现,定位误差主要是由环境光照的变化产生的,因此本系统应对光照变化的鲁棒性不高。
5 结束语
随着智能电网的发展,将会有越来越多的电力设备实现智能化巡检和智能化操作。本文提出的带电操作机器人系统将数字图像处理、立体视觉技术和自动化控制技术结合起来,在站所内任务测试中,能够稳定地完成有效操作,实现高压电柜上4种类型按钮的自动化操作,为智能变电站的发展做出了有效探索。但是,该系统仍存在需要优化的部分,包括手爪伸出的距离以及模板图像采集等参数仍然依赖于建站时的人工标定,自动化程度有待提高。另外各个变电房中高压柜上的开关种类各不相同,除了4种本系统已开发的类型外,还有其他多种类型的开关需要操作,这也是本系统今后需要进一步完善的地方。
