液压系统进油节流调速的模糊PID控制策略与仿真研究
2020-06-03陆金华朱兴龙付光华
陆金华,朱兴龙,付光华,孙 进
(扬州大学机械工程学院,江苏 扬州 225127)
液压调速系统具有功率大、传动平稳、性价比高和承载力大等特点,被广泛应用于航空航天、工程机械、冶金等领域。节流调速系统由于调速范围大、结构简单,被广泛应用在中小功率的简单设备中[1-2]。
在节流调速回路中,采用节流阀的调速回路结构简单,回路稳定性随负载的变化而变化,只能用于负载变化很小或速度稳定性要求不高的场合。在液压系统对速度稳定性要求较高或负载变化较大的情况下,一般用调速阀调速。由于调速阀上的压差包括节流阀上的压差和减压阀上的压降,同时存在溢流功率损失,因此用调速阀的节流调速回路比用节流阀的节流调速回路的功率损失大[3-4]。为提高进油节流调速回路的速度稳定性,减少液压系统的功率损失,对进油节流调速回路进行分析研究,具有非常重要的意义。
1 速度稳定原理分析
1.1 静态速度稳定原理分析
进油路节流调速原理如图1(a)所示。
不计阻尼力及惯性力的影响,假定活塞向右运动,其受力平衡方程为
p1A1=p2A2+F
(1)
式中:F为液压缸的负载;p1,p2为液压缸进油腔和回油腔的压力,因回油腔直接连通油箱,故假设p2≈0;A1,A2为液压缸无杆腔和有杆腔的有效面积。
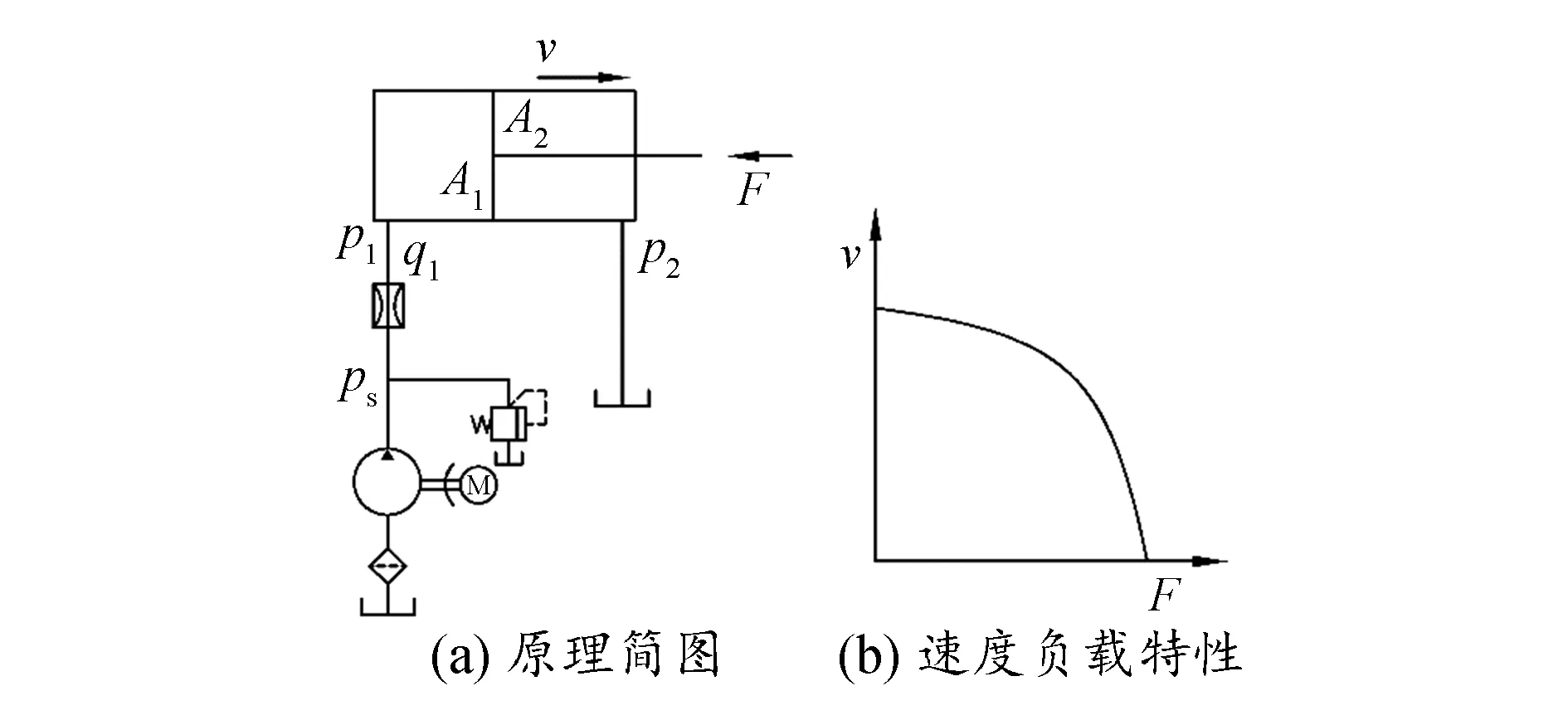
图1 进油路节流调速回路
通过进口节流阀进入液压缸的流量q1为:
(2)
根据液流连续原理可知:
q1=A1v
(3)
式中:v为液压缸活塞运动速度。
联立式(1)~式(3)可以得到表示被驱动执行机构运动速度与节流阀开度以及负载间关系的静特性方程:
(4)
如果在负载变化的情况下,设定速度v为一固定值,那么节流阀阀口开度x为:
(5)
溢流阀额定压力ps和节流阀阀口开度x的关系为:
(6)
速度负载特性如图1(b)所示。由式(4)和图1(b)可知,当A1,ps和x固定不变时,随着负载F增加,工作速度v减小,当负载增大到Fmax=psA1时,工作速度v=0;反之,当负载减小时,速度增加。
图2(a)为溢流阀额定压力和节流阀开度可调调速回路原理图。由式(4)可知,液压缸速度和节流阀开度与溢流阀设定的额定压力有关。在变负载情况下,当节流阀开度x一定时,改变溢流阀额定压力ps可以使液压缸速度稳定;当溢流阀额定压力ps一定时,改变节流阀开度可以使液压缸速度稳定。该调速回路速度负载特性如图2(b)所示,图中v0为期望速度值。

图2 溢流阀额定压力和节流阀开度可调调速回路
1.2 溢流阀压力可调节的液压缸动力学模型
若不考虑液压缸和管道的内外泄漏,则液压系统输入负载的扰动、速度和输出量驱动力的微分方程为[5]:
(7)
(8)
式中:V1为液压缸进油腔的体积;K为液压油等效体积弹性模量;D为阻尼系数;m为液压系统驱动的负载质量。
将式(2)、(7)、(8)取增量,并进行拉氏变换,可得:
(9)
(10)
A1P1(s)-F-DU(s)=msU(s)
(11)
式中:ps0和p10为节流阀的静态工作点。
根据式(6)、(9)~(11),基于Simulink建立动力学模型,如图3所示,其中输入量为F,v0,x,输出量为溢流阀压力ps、液压缸进口压力p1c、液压缸活塞速度v和液压缸位移量s。
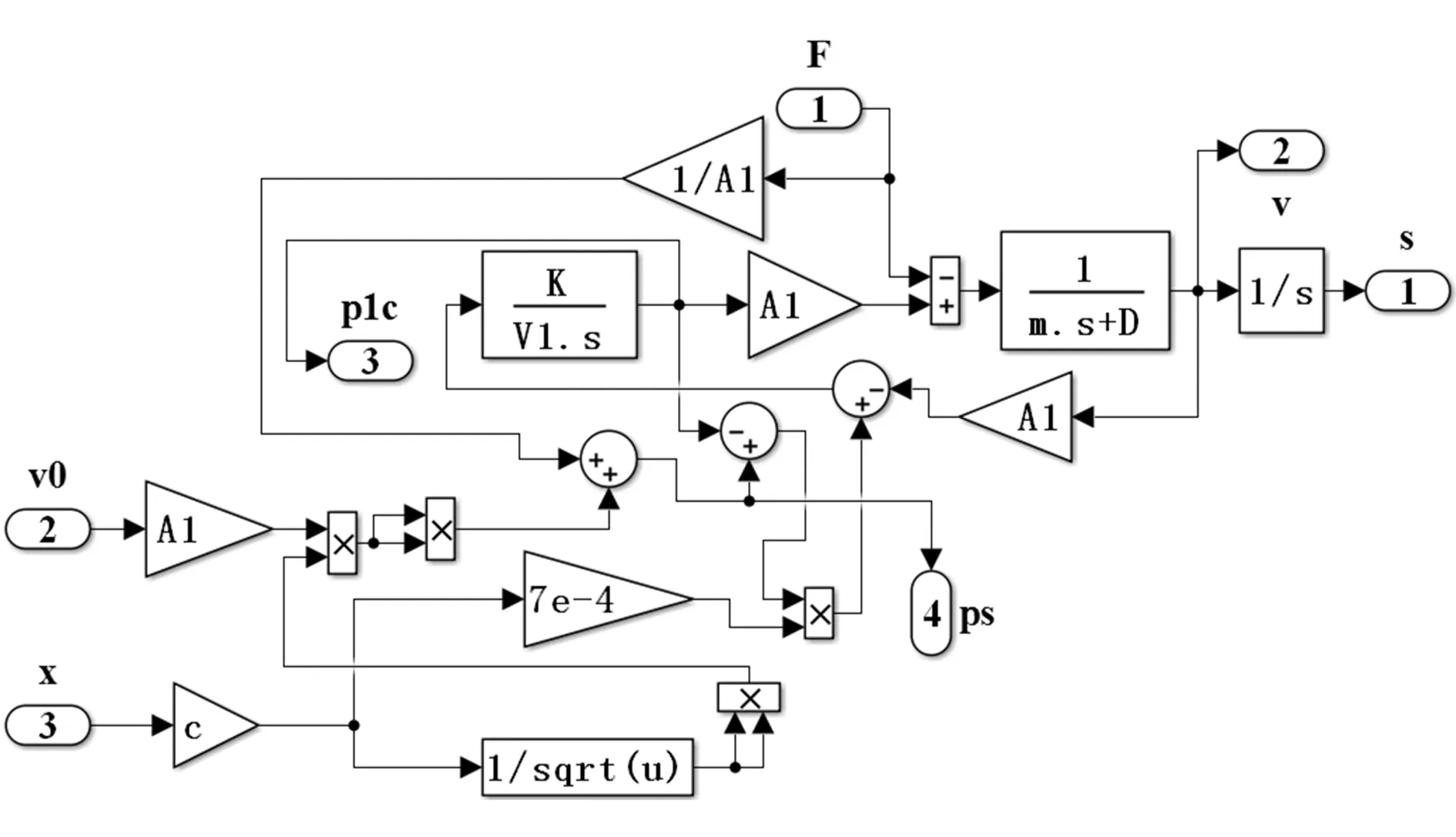
图3 溢流阀压力可调动力学模型

如图4、图5所示,当外负载F成比例上升时,控制溢流阀压力值随着负载F的上升而增加,节流阀前后压力差Δp经过变化达到稳定值,从而使液压缸速度经过变化达到稳定值0.038 m/s,稳态误差为5%。

图4 压力负载曲线图

图5 溢流阀压力可调液压缸速度曲线图
1.3 节流阀开度可调的液压缸动力学模型
根据式(2)、(3)、(5)、(10)、(11),基于Simulink建立动力学模型,如图6所示,其中输入量为F,v0,ps(2×107Pa),输出量为x,p1c,v和s。
如图7、图8所示,当外负载F成比例上升时,控制节流阀开度随着负载F的上升而增大,从而使液压缸速度经过变化达到稳定值0.037 8 m/s,稳态误差为5.5%。
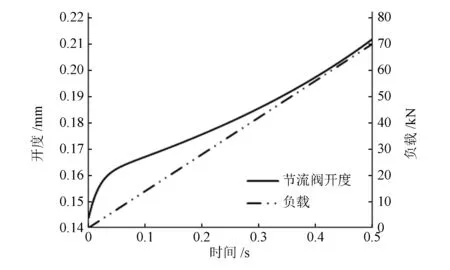
图7 节流阀开度负载曲线图
由图5和图8可知,两种常规控制方法均能稳定液压缸速度,但均存在稳态误差,未能达到期望的速度0.040 m/s。为减小稳态误差,并提高液压缸速度的响应速度,下面拟采用模糊PID控制达到预期控制效果。
2 模糊PID控制策略
为了减小稳态误差,并使液压缸的输出速度能够快速稳定地跟踪设定值,本文采用模糊PID复合控制方法,即在常规PID基础上,以速度反馈值与设定速度值的偏差e和误差变化率ec作为输入,用模糊推理的方法对PID参数KP,KI,KD进行在线自整定,以满足不同e和ec对控制器参数的不同要求,从而使系统稳定在设定值,达到调速目的。
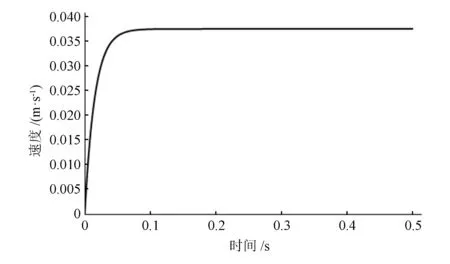
图8 节流阀开度可调液压缸速度曲线图
模糊PID控制策略如图9所示。
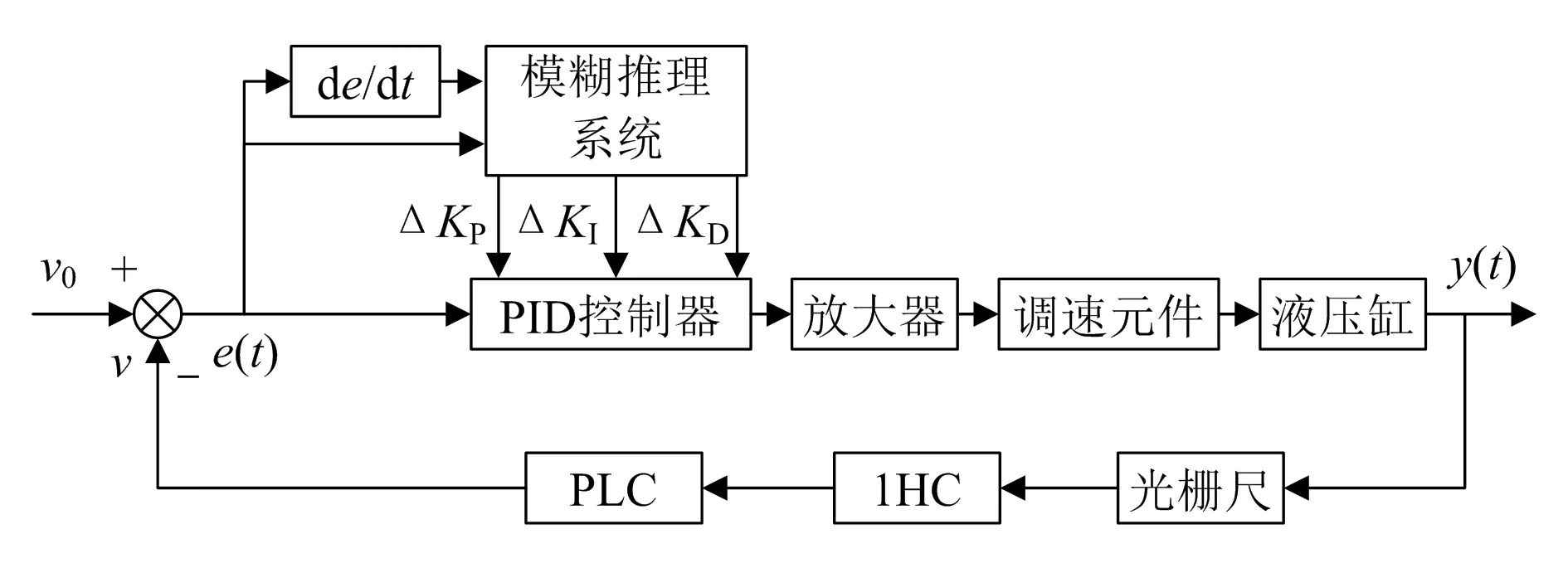
图9 模糊PID控制策略框图
模糊PID控制器中,PID控制器使用模糊推理系统校正,以偏差e和偏差变化率ec作为输入量,以PID 3个参数的修正量ΔKP,ΔKI,ΔKD为输出量。系统模糊子集分为7级,分别为{NB,NM,NS,ZO,PS,PM,PB}。e和ec的隶属度函数选择高斯类型,ΔKP,ΔKI和ΔKD的隶属度函数均选择三角类型。
控制规则可以用if,then语句表示,例如if(eis NB) and(ecis NB) then(ΔKPis PB)。以ΔKP为例,其模糊控制规则见表1[6-7]。
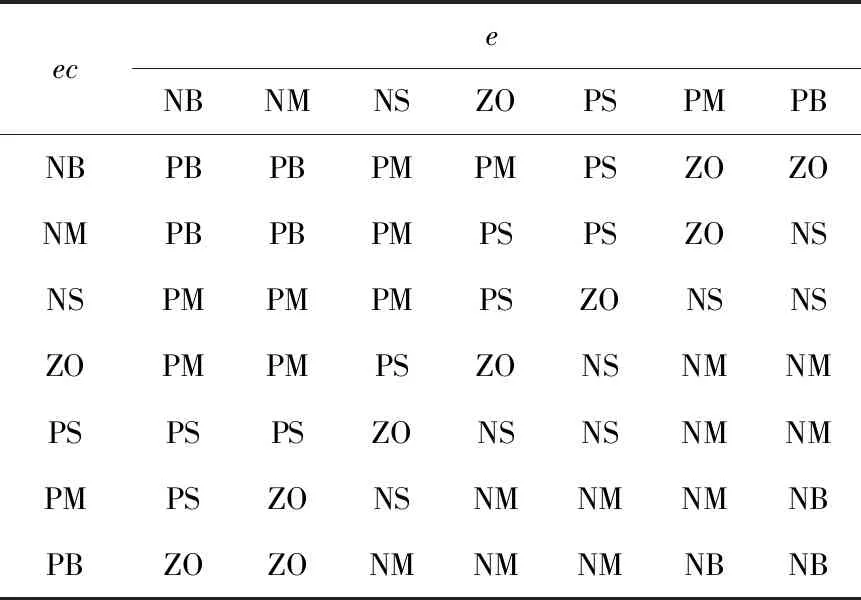
表1 ΔKP模糊控制规则
在建立模糊控制规则后,用式(12) ~(14)进行自适应校正:
(12)
(13)
(14)

在图3所示的动力学模型基础上,建立基于溢流阀压力可调的速度反馈,图10所示为液压系统在Simulink中建立的溢流阀压力可调的模糊PID控制策略仿真模型,e的基本论域为[0,4],ec的基本论域为[-4,0],ΔKP的基本论域为[-1×108,-6×107],ΔKI的基本论域为[6×107,1×108],ΔKD的基本论域为[0,2 000]。图中MATLAB Fcn为液压缸速度计算模块。
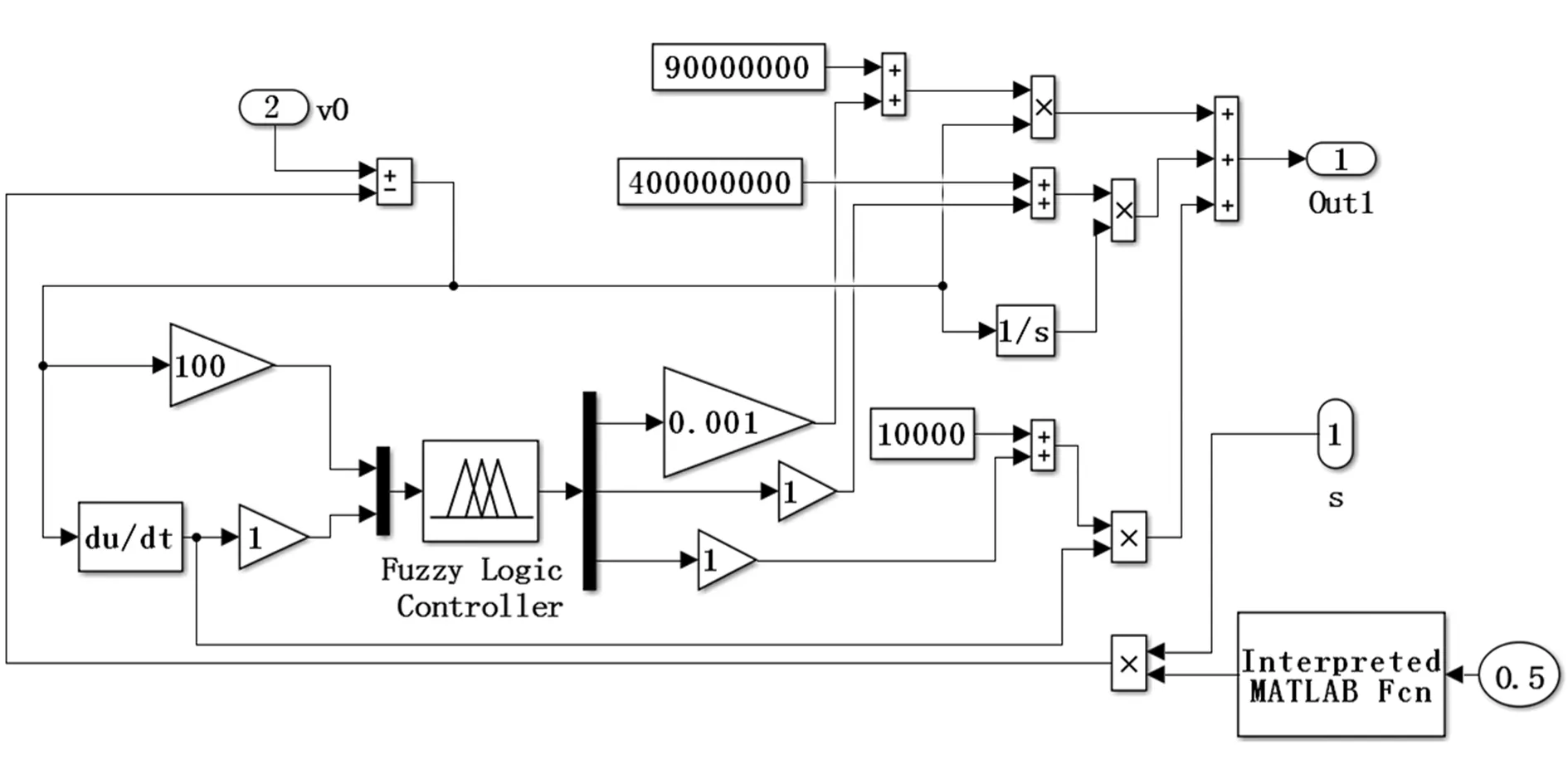
图10 溢流阀压力可调的模糊PID控制仿真模型
在图6的动力学模型基础上,建立基于节流阀开度可调的速度反馈。图11所示为节流阀开度可调的模糊PID控制策略仿真模型,e和ec的基本论域为[-2,2],ΔKP,ΔKI和ΔKD基本论域为[-0.01,0.01]。

图11 节流阀开度可调的模糊PID控制仿真模型
图12~图15为模糊PID控制策略下的仿真曲线。
仿真结果表明,在模糊PID控制策略下,两种调速方法均能使液压缸速度达到稳态值,且稳态误差非常小,响应速度快,明显优于常规控制方法。
由图15可知,在一定时间内、相同负载情况下,溢流阀压力可调系统下的溢流阀最大额定压力值比节流阀开度可调系统下的溢流阀额定压力值小,更加节能。

图12 溢流阀压力可调压力负载曲线图
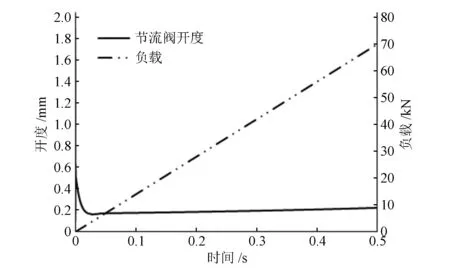
图13 节流阀开度可调开度负载曲线图
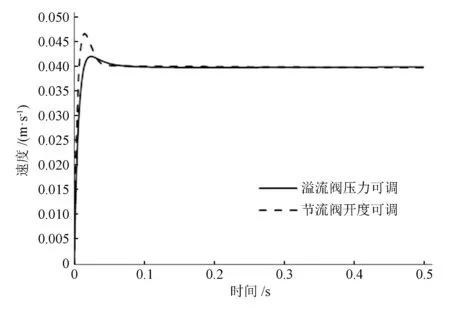
图14 速度仿真曲线图

图15 溢流阀压力负载曲线图
3 结束语
本文主要以液压缸速度稳定为研究内容,提出了基于溢流阀压力可调的调速方案和基于节流阀开度可调的调速方案。研究与仿真结果表明,通过模糊PID控制策略可以提高液压缸速度的响应速度,减小液压缸速度稳态误差。与常规控制方法相比,经过模糊PID控制策略优化后的调速系统具有稳态误差小、响应速度快的优点。
