耙吸式挖泥船电网无功补偿装置控制研究*
2020-06-03杨二中朱汉华徐合力
杨二中 朱汉华 徐合力
(武汉理工大学能源与动力学院 武汉 430063)
0 引 言
船舶交流电力系统中,电网的大多数负载设备都是感性的,当同步发电机输出滞后电流时,电枢磁势除了一部分产生交轴电枢反应外,还有一部分产生直轴去磁电枢反应,这样会造成发电机组输出端电压的下降,同时导致电网功率因数降低[1].文献[2]指出其曾经工作的一艘船舶因功率因数过低导致发电机过载造成全船失电的事故发生.在船舶实际负载工作的状态下,无功功率又是无法避免的,所以在电网中用无功补偿方式来提高船舶电网功率因数十分有必要.
无功补偿设备主要有TSC(晶闸管投切电容器)、TCR(晶闸管控制电抗器)、TSR(晶闸管投切电抗器)、SVG(静止无功发生器)[3-4],其中TSC只能补偿容性无功,TCR和TSR只能补偿感性无功,TSC和TSR是有级调节,TCR和SVG可以实现连续调节,但是TCR工作过程中会产生大量谐波污染电网.SVG可以补偿容性无功和感性无功,并且可以连续调节,但SVG存在成本较高,控制系统比较复杂的,并且技术并未完全成熟[5].此外,文献[6]提出将有限控制集模型预测控制应用于混合有源电力滤波器用于动态无功补偿.文献[7]介绍了一种用于智能电网系统动态无功补偿的晶闸管控制LC补偿器.但船舶电网作为孤立的电网系统,具有容量小,工况复杂多变等特点.目前并没有专门用于船舶电网进行无功补偿的专用设备.目前船舶所用无功补偿设备多为陆船通用,不能达到船舶预期效果[8].
目前比较常用的混合无功补偿装置是TSC+TCR,但是TCR工作时会产生大量的谐波[9].本文采用TSC+TSR的混合无功补偿装置对散货船电网进行无功补偿,以功率因数和无功功率值为控制目标参数.由于TSC和TSR工作过程中晶闸管只起到开关作用,所以该混合无功补偿装置工作过程中理论上是不产生谐波的.
1 船舶电网无功补偿原理
三相电路瞬时无功功率理论突破了传统的以平均值为基础的功率定义,系统的定义了瞬时无功功率和瞬时有功功率量等瞬时功率量[10].传统理论中的有功功率、无功功率都是在瞬时值和平均值的基础上定义的,它们只适用于电压、电流均为正弦波时的情况.而瞬时无功功率理论中的概念都是在瞬时值的基础上定义的,它不仅适用于正弦波,也适用于非正弦波和任何过渡过程的情况.正是基于三相瞬时无功功率理论,我们得以将无功功率作为无功补偿时的一个控制目标参数.
1.1 TSC工作原理
TSC(晶闸管投切电容器)的基本工作原理见图1.图1a)为TSC的单相电路,其由两个反向并联的晶闸管和一个电容器串联,两个反向并联的晶闸管控制电容器的通断,而串联的小电网只是用来抑制电容器投入电网时可能造成的冲击电流的,多数情况,这个电感往往不画出来.在工程实际中常采用一组由两个反向并联的晶闸管的电容器来对电网进行无功补偿,见图1b).其根据电网无功负荷的大小投入适当组别的电容器组,从而可以对电网进行较为精确的无功功率补偿.当TSC用于三相电路时,可以采用三角形连接,也可以采用星形连接,但每一相都连接成图1b)的那样分组投切.图1c)为不同电容器组的伏安特性曲线,根据投入的电容器组不同,TSC的伏安特性曲线可以分别是A,B,C.TSC只能对电网补偿容性无功.
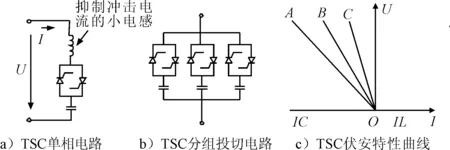
图1 TSC的基本工作原理
1.2 TSR的工作原理
TSR(晶闸管投切电抗器)的工作原理与TSC的工作原理相类似.晶闸管在其投切过程中同样只起到开关的作用,所以不会像TCR工作过程中产生较多的谐波,从而对电网造成污染.一般情况下将晶闸管串联在两个电抗器之间,可以有效地减小冲击电流对晶闸管的破坏,单相的TSR见图2a).三相的TSR可以连接成星形或三角形.TSR的伏安特性曲线见图2b),其伏安特性曲线位于U-I坐标系的第一象限,根据投切电抗器组数不同其伏安特性特性曲线见图中的A,B,C.TSR只能对电网补偿感性无功.
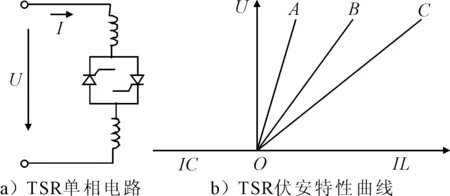
图2 TSR的基本工作原理
2 TSC+TSR的控制策略
2.1 TSC+TSR的综合控制
本文采用TSC+TSR对耙吸式挖泥船电网进行无功补偿,以功率因数和无功功率为控制目标参数,根据电网功率因数和无功功率值采用双闭环控制实现对散货船电网无功功率的动态补偿,见图3,具体的控制细节如下:
1) TSC+TCR的投切判断设置两种判据,一是船舶电网的功率因数小于等于0.98;二是当无功补偿装置正常运行时,同时满足船舶电网的剩余无功功率为容性无功和TSR补偿的感性无功大于500 kvar两个条件.当船舶电网运行于这两种状态的任意一种状态时TSC装置便会重新进行投切判断.
2) 电网总无功功率分为两部分,第一部分是电容器组补偿容性无功的实际值的绝对值(1路信号),第二部分是电网剩余无功功率(2路信号,感性无功功率为正值,容性无功功率为负值),此外还有TSC投切控制器根据投入运行电容器组而输出的容性无功理论补偿值的绝对值(3路信号).当进行电容器组投切时将1路信号与2路信号的总和通入TSC投切控制器进行电容器组的投切.当投入电容器组使电网功率因数大于0.98并且稳定保持0.2 s时,1路信号与2路信号切断,3路信号通入TSC投切控制器,实现对电容器组的投切闭锁,使用3路信号对TSC进行投切闭锁能够避免因电压波动而造成电容器组的实际补偿值越限而造成TSC投切闭锁失败.
3) 当TSC进行投切动作时,TSR处于断网状态,这样可以避免其投入电抗器后对电容器组的投切造成干扰.当TSC进行投切闭锁并经过2.5 s延时后,TSR并入电网并根据电网中剩余无功功率(2路信号)进行投切动作.当电网剩余无功功率为感性无功时,TSR不投入电抗器组.当电网剩余无功功率为容性无功时,TSR根据容性无功功率值进行电抗器组的投入以抵消电网多余的无功功率,使耙吸式挖泥船电网呈弱感性状态运行.
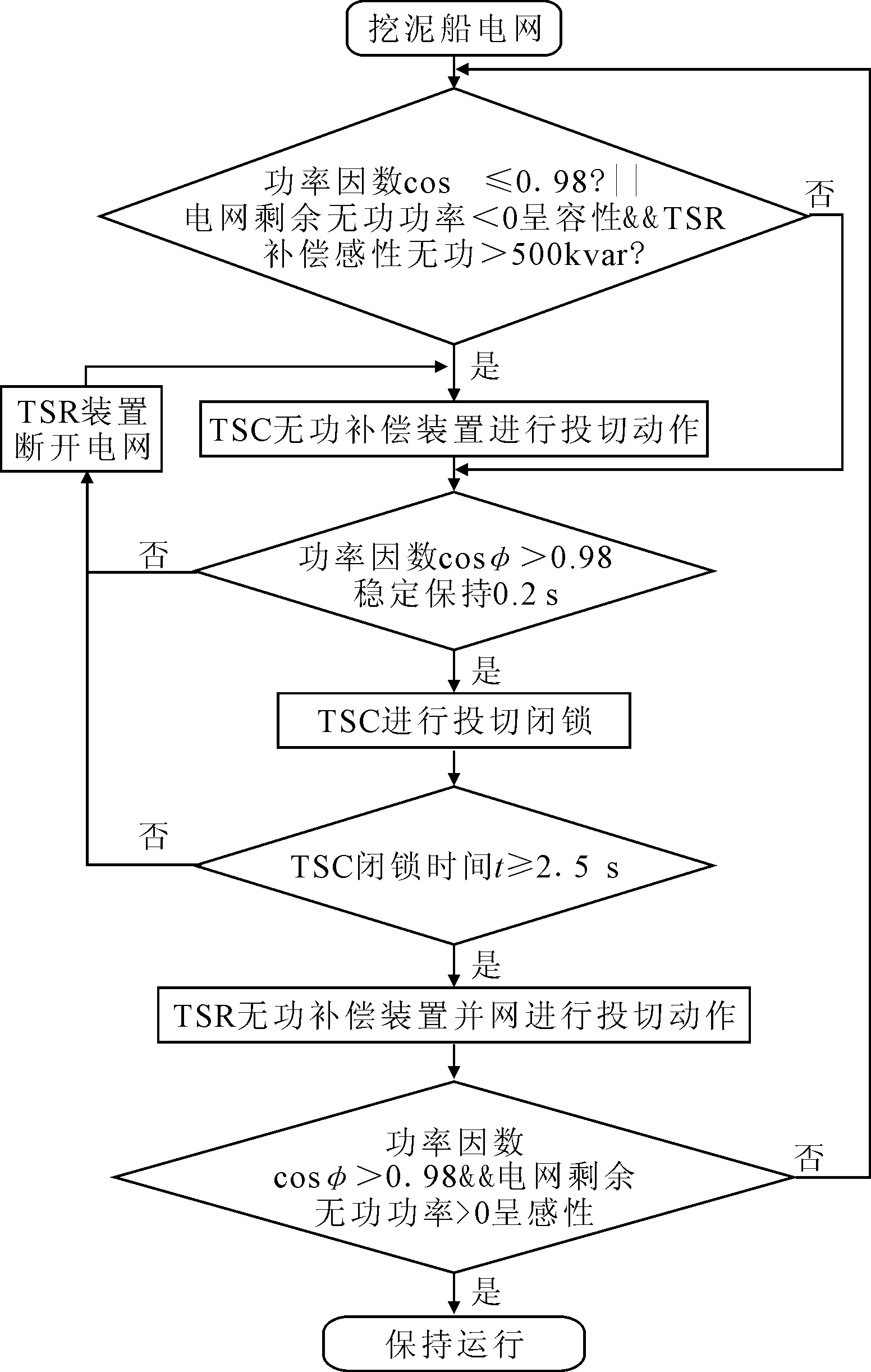
图3 TSC与TSR投切控制流程图
2.2 TSC的投切控制
2.2.1电容器的参数选择与分组
耙吸式挖泥船电网中的负载大多为三相对称负载,因此电容器组的连接方式可选择为三角形连接,为避免电容器组并网时产生大的冲击电流,需要与电容器串联一个小电感,电容器组三角形连接时每相电容器的计算公式为
Qc=3U(U/(1/ωC)-ωL)×10-3
(1)
整理得到:
(2)
式中:ω=2πf,为角频率;L为每相电容器串联电感值,H;U为线电压,kV;Qc为电容器组的补偿容量,kvar;C为每相所需电容值,F.
本文所选研究对象耙吸式挖泥船发电机组容量与主要负载参数见表1.
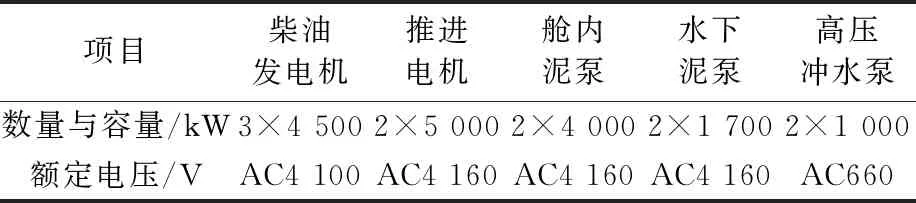
表1 耙吸式挖泥船发电机组容量与主要负载参数
本文选取八组三角形连接的电容器组,每组补偿容量分别为200,400,600,800,1 000,1 000,2 000,2 000 kvar,编号分别为1~8,额定电压为6.6 kV,补偿容量为200~8 000 kvar,可以将一个12 000 kVA的船舶电站满负荷运行时功率因数从0.75提高到0.98.电容器组分组情况见表2.
注:无功功率用区间表示时感性无功-正值;容性无功-负值.
2.2.2电容器组投切震荡检测
考虑到电容器组在电网总无功功率的临界值处可能会出现投震荡,文中提出了对电网总无功功率进行临界值判断的方法.设置的临界检测区间见表3.
为避免投切电容器时产生投切震荡,投切震荡检测模块首先对电网总无功功率是否能够稳定的落入表3所示区间内,当检测到电网总无功功率能够稳定落入到表3的某一区间内0.2 s时,将电网总无功功率减去100 kvar后送入到TSC投切判断模块,这样就可以保证电网总无功功率落入到临界区间左侧的无功功率投切区间,从而避免了产生投切震荡和容性无功的大量过补偿.如果电网中总感性无功功率不能稳定的落入上表中的区间内,TSC投切控制模块将按照原数值进行电容器组的投切.

表3 电容器组投切震荡检测区间
2.3 TSR的投切控制
2.3.1电抗器的参数选择与分组
TSR中电抗器的连接方式同样选择三角形接法,本文选取了三组三角形接法的电抗器组,每组补偿容量分别为100,200,300 kvar,额定电压为6.6 kV,编号分别为1,2,3,补偿感性无功容量范围为100~600 kvar.每相电抗器的电感值计算为
(3)
式中:ω=2πf,为角频率;L为每相所需电感值,H;U为线电压,kV;QL为电抗器组的补偿容量,var.
电抗器组的分组情况见表4.

表4 容性无功功率分组及投入对应电抗器补偿容量 kvar
2.3.2电抗器组投切震荡检测
考虑到当电网过补偿容性无功处于电抗器投切分组的临界值处可能会出现投震荡,同样也需要对电网过补偿容性无功功率进行临界值判断.设置的临界检测区间见表5.

表5 电抗器组投切震荡检测区间
电抗器投切时的震荡检测与电容器组投切时的震荡检测相类似,投切震荡检测模块首先判断电网过补偿容性无功功率是否能够稳定的落入上表所示区间内,当检测到电网容性无功功率值能够稳定落入到表5的某一区间内0.2 s时,将电网总无功功率加上50 kvar后送入到TSR投切判断模块,这样就可以保证电网总无功功率落入到临界区间右侧的无功功率投切区间,从而可以有效避免产生投切震荡和感性无功的欠补偿.如果电网中过补偿的容性无功功率不能稳定的落入上表中的区间内,TSR投切控制模块将按照原数值进行电抗器组的投切.
3 仿真实验与结果分析
本文以Simulink平台搭建了仿真实验模型[11-12],仿真模型见图4.
仿真实验选择耙吸式挖泥船的排泥工况进行仿真实验.排泥工况由舱内泥泵和高压冲水泵协同工作.假定稳定工况下两台高压冲水泵的有功功率和无功功率分别为1 000 kW和750 kvar,分别在0.8和1.4 s投入运行,稳定工况下两台舱内泥泵的有功功率和无功功率分别为4 000 kW和2 800 kvar,分别在2.0和2.6 s投入运行.随后在8 s时切除一个舱内泥泵负载,进行负载突减仿真实验.最后在13,13.5和14 s分别投入有功由图5~7可知:
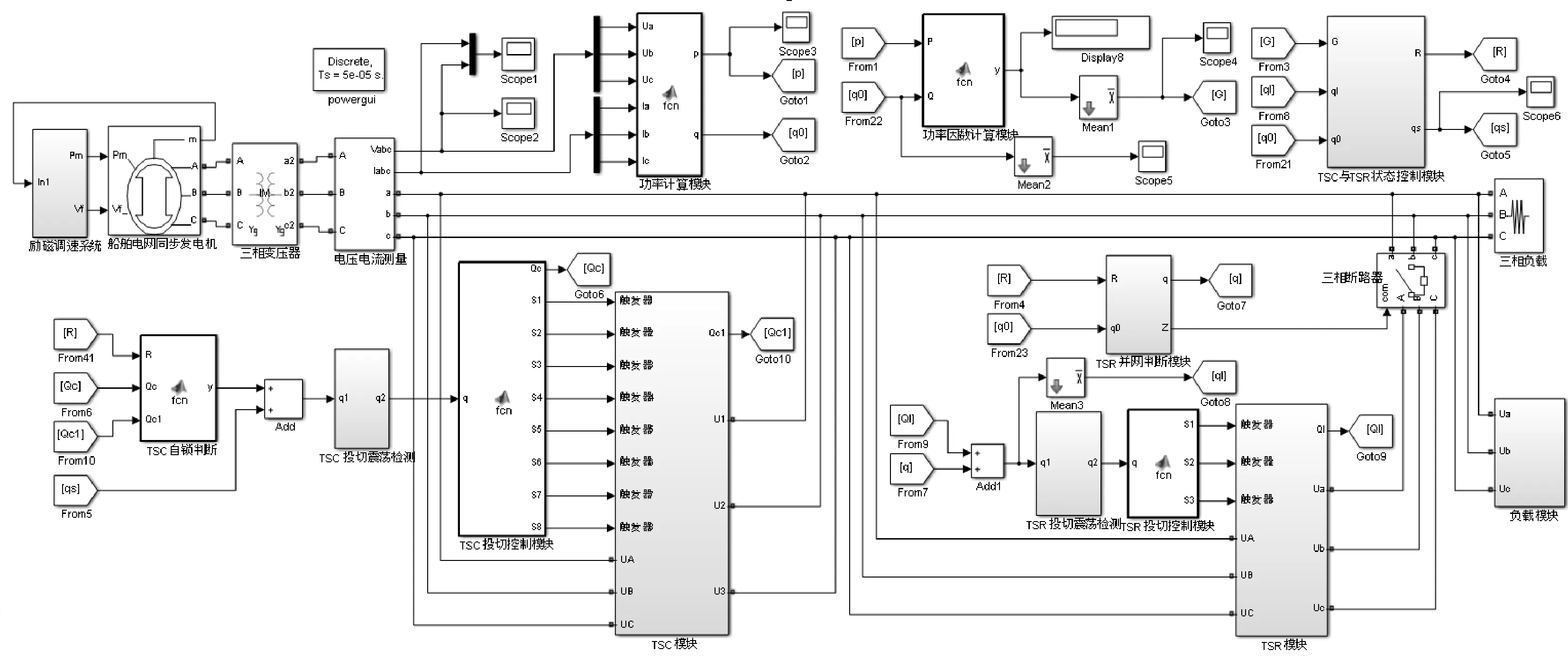
图4 耙吸式挖泥船电网无功补偿仿真模型
功率和无功功率分别为50 kW,45 kvar、80 kW,75 kvar与60 kW,55 kvar的常规动力负载.仿真实验结果与分析见图5~7.

图5 挖泥船电网进行无功补偿功率因数的变化情况
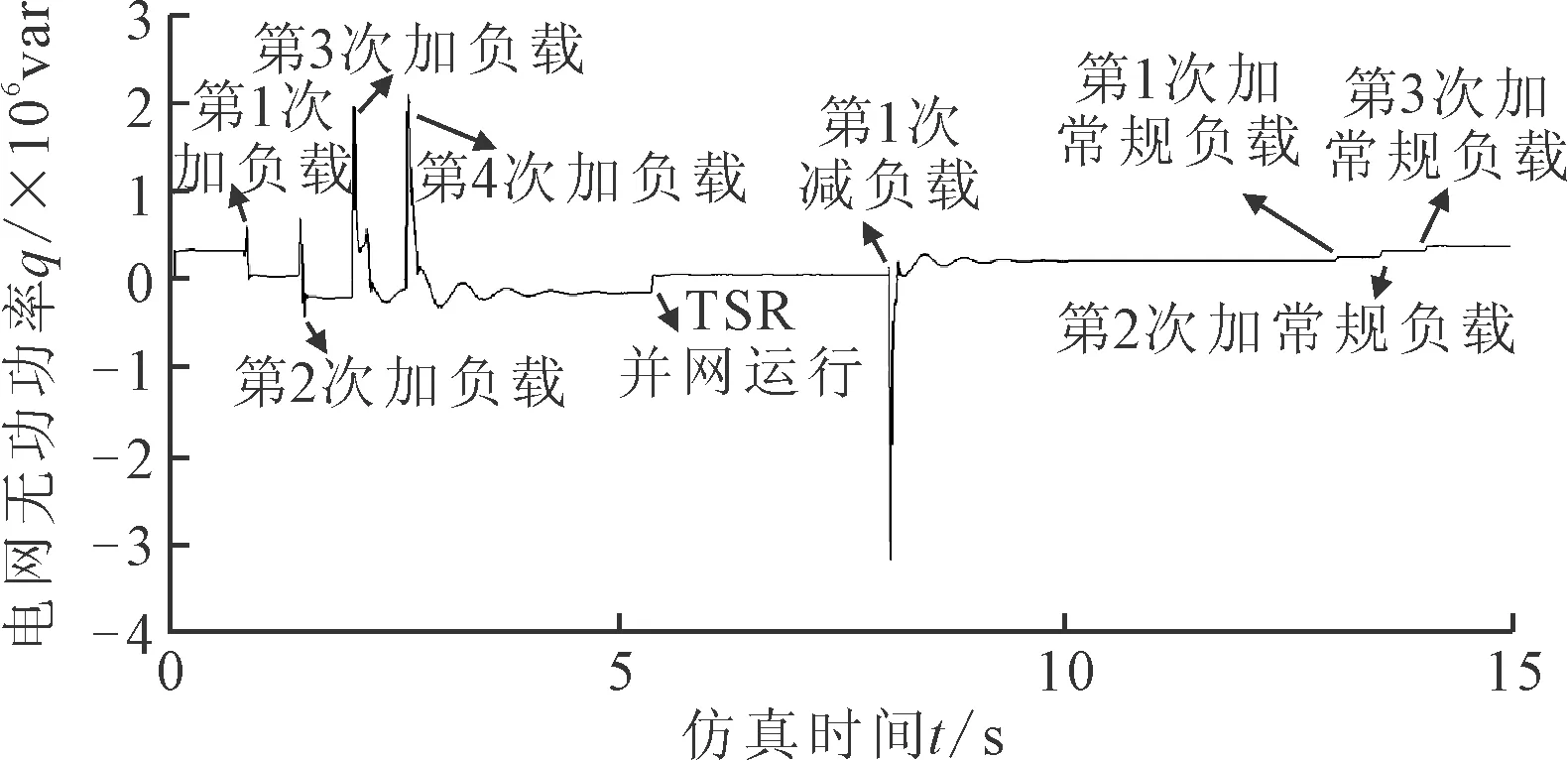
图6 挖泥船电网进行补偿后电网无功功率的变化
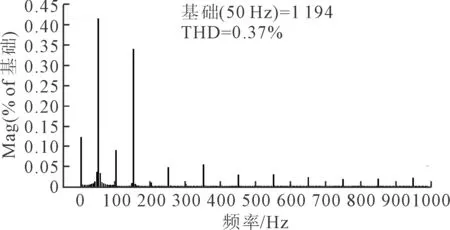
图7 TSC与TSR共同运行时b相电流总谐波畸变率
1) 耙吸式挖泥船电网未进行无功补偿前,在进行负载突变实验时电网功率因数在0.8左右,进行无功补偿后电网的功率因数提高到了0.98以上,功率因数得到了大幅度的提高.
2) 耙吸式挖泥船电网在两个高压冲水泵负载与两个舱内泥泵负载投入运行并趋于稳定后,在5.35 s时TSR(晶闸管投切电抗器)并入电网运行,抵消掉过补偿的容性无功,电网功率因数依然保持在0.98以上.
3) 当TSC与TSR共同运行时,在7.7 s选择了10个周期的电流波形并进行了谐波分析,a,b,c三相电流总谐波畸变率分别为0.19%、0.37%、0.37%,其中b相电流总谐波畸变率见图7,这表明TSC与TSR共同运行时基本上不产生谐波.
4) 在8 s时切除掉一个舱内泥泵负载,可以看到TSC重新进行了投切动作使电网的功率因数很快再次补偿到0.98以上,电网趋于稳定剩余无功功率为感性无功功率,所以TSR并未进行投切动作.随后在13,13.5和14 s加入常规动力负载时,因功率因数为低于0.98,TSC仍处于投切闭锁状态.
4 结 论
1) 以耙吸式挖泥船电网功率因数和无功功率两个目标参数相结合来进行电容器组和电抗器组的投切,能够快速准确的将电网的功率因数提高到0.98以上.
2) TSC+TSR混合无功补偿装置能够很好的解决耙吸式挖泥船电网容性无功过补偿的问题,使电网呈弱感性运行,同时该混合无功补偿装置在运行过程中基本不产生谐波对电网造成污染.
3) 当耙吸式挖泥船电网处于中度或重度负荷时,由于较小的无功功率变化对功率因数的影响较小,TSC能够稳定的运行而不进行频繁的投切动作,可以有效的提高晶闸管的使用寿命.