基于多频信息的城市水下特长隧道中部光环境优化设计*
2020-06-03倪玉丹杜志刚杨理波焦方通
倪玉丹 杜志刚 杨理波 焦方通
(武汉理工大学交通学院 武汉 430063)
0 引 言
随着城市快速扩张与有限土地资源间冲突的不断加剧,城市隧道正逐渐被广泛采用,在受到江河湖海等限制的区域,一些跨江跨海等城市水下特长隧道逐渐兴起.城市水下特长隧道与普通城市隧道相比,其除了具有普通城市隧道内视觉环境单调、参考信息匮乏等问题外,城市水下特长隧道往往里程较长,更容易导致驾驶员心理压力增大、产生不适,长时间在特殊的环境中行驶也容易导致驾驶员产生心理和生理疲劳,具体表现为对车速等感知判断能力减弱,反应时间延长,驾驶操作失误.因此,本文以城市水下特长隧道中部光环境为研究对象,提出隧道中部光环境优化设计方法,对于提高城市水下特长隧道中部的交通安全具有重要研究价值.
国内外学者对于城市隧道光环境的研究主要集中在隧道出入口及驾驶员视觉特性方面.胡江碧等[1]研究指出驾驶员长期处于动态隧道光环境中时心理负荷较大,会出现心烦、紧张、兴奋,以及由紧张到适应转折等反应;在接近隧道入口时,驾驶员注视点前移,视区变窄,注视时间增加,眨眼次数减少,注意力主要集中在前方隧道入口路面.潘姝等[2]发现相比于隧道外环境,隧道内驾驶员获取信息的难度更大,对同一区域的注视重复率明显增加,视觉搜索效率变低.而在驾驶疲劳方面,Ann等[3]探究了驾驶疲劳的原因,研究指出单调的驾驶环境可能导致驾驶员因无聊产生驾驶疲劳,而压抑的工作环境也可能使驾驶员因高度紧张产生精神和肌肉上的疲劳.Mcvay等[4]发现,随着驾驶时间的增加驾驶员维持车速的行为会减少、转向偏移会增加,表明驾驶员随着驾驶时间的增加变得疲劳难以关注其驾驶行为.倪娜等[5]对终南山隧道交通事故数据进行分析发现,特长隧道内驾驶疲劳和操作失误是导致交通事故的主要原因.
以上研究主要侧重在了解城市隧道光环境特征以及驾驶员的视觉特性等方面.而目前关于改善城市水下特长隧道中部单调的行车环境,缓解驾驶疲劳问题等方面缺乏深入研究.因此,本文基于多频信息理论对城市水下特长隧道中部光环境进行优化设计,旨在改善隧道中部单调的驾驶环境,缓解驾驶员驾驶疲劳,以期为城市水下隧道光环境优化设计提供新思路.
1 改善原理及优化方法
1.1 改善原理
发光物体或逆反射物体的设置间距可形成闪现的视觉警示,视觉警示的频率为时间频率,即刺激物在单位时间内呈现的周期,单位为Hz[6].时间频率是影响驾驶员者视觉感知的重要因素,频率过高会给驾驶员造成视觉压力,过低则会削弱其警示作用,研究表明驾驶员行车过程中,设置图案的频率在2~12 Hz范围内最合适[7-8].因此,拟采用时间频率理论,通过多频信息的组合实现对城市水下特长隧道中部光环境的优化设计.
折线元素在建筑空间环境设计中代表理性的元素,是秩序美与突变形态的重要来源[9],折线图案的衔接、起伏、高低变化,在方向上加入有规律的突变运动,线条的变化具有一定方向性,给驾驶员流动的心理感受,具有动态美感;曲线元素因其圆润的特点和弧度的变化,给流动空间赋予了容纳、疏导、流畅等感性意义[10],人对曲线元素天然的偏爱导致人的感知能力和关注力会无意识地被曲线元素吸引,郑展骥等[11]研究中指出,在隧道侧壁布设韵律型标线可有效缓解驾驶员驾驶疲劳现象.因此以隧道侧壁环境为中心,按不同区段不同的行车需求设置不同的侧壁曲线,赋予侧壁图案阶段性变化,可改善隧道中部行车环境单调性,延缓驾驶疲劳的生成,提高行车安全性.
1.2 优化设计方法
根据城市水下特长隧道中部驾驶员速度感缺失以及易产生驾驶疲劳的特点,将中部划分为安全段和唤醒段,其中安全段主要以提高驾驶员速度感为优化目的,需要驾驶员保持理智、清楚的判断,因此安全段通过设置高频黄黑立面标记,提升驾驶员速度感,同时黄黑立面标记可以有效显示侧壁与路面分界,体现空间路权及路侧障碍物;设置中频心电图案,以提升驾驶员距离感,同时也具有一定韵律性,可以有效提升隧道空间美感.唤醒段则以改善驾驶疲劳为目的,视觉环境需要富有变化,设置超低频韵律型图案,提升舒适感、美感,阶段性设置起到规律性给予驾驶员视觉刺激,缓解驾驶疲劳,提高驾驶舒适性的作用.具体见图1和表1.
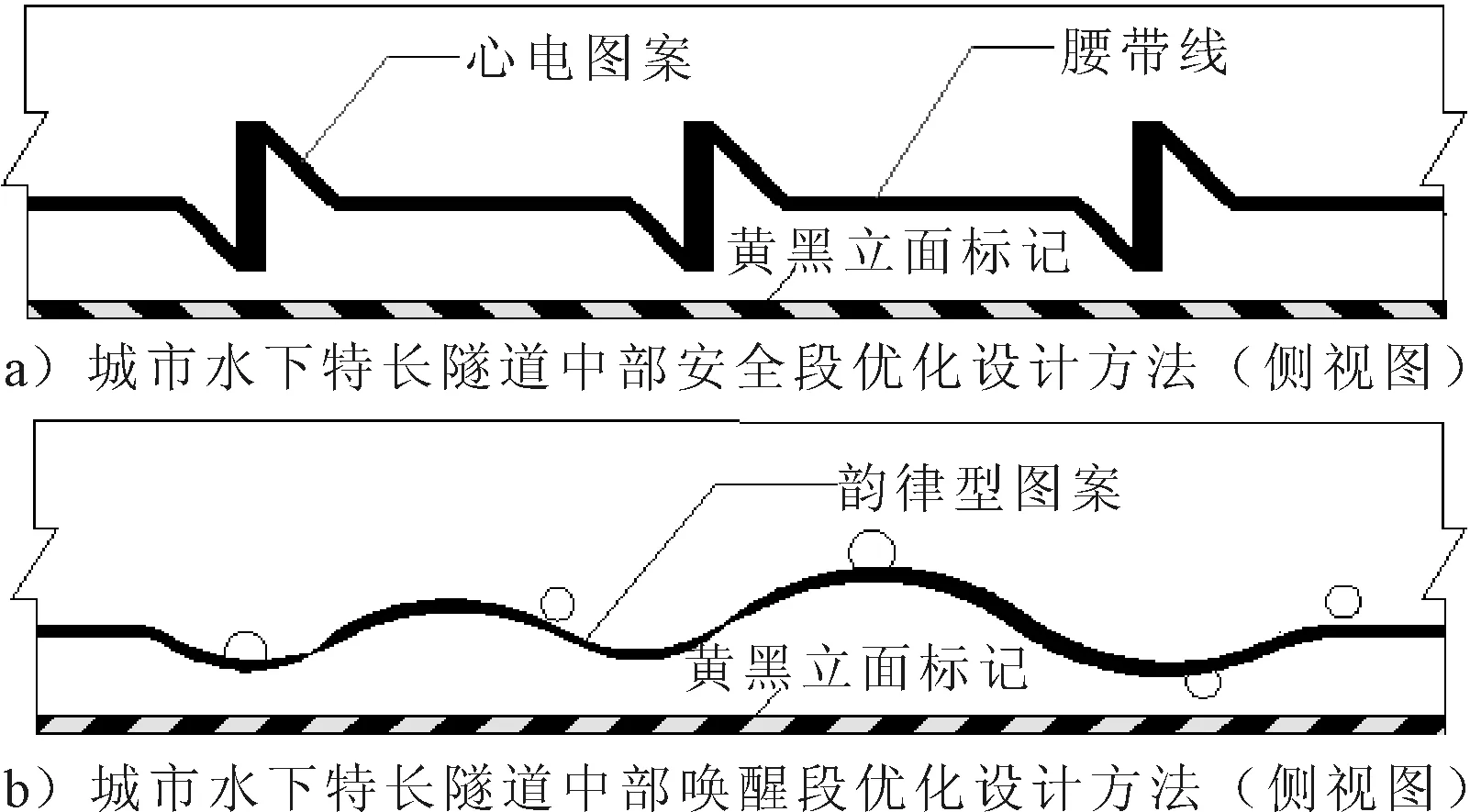
图1 城市水下特长隧道中部优化设计方法效果图
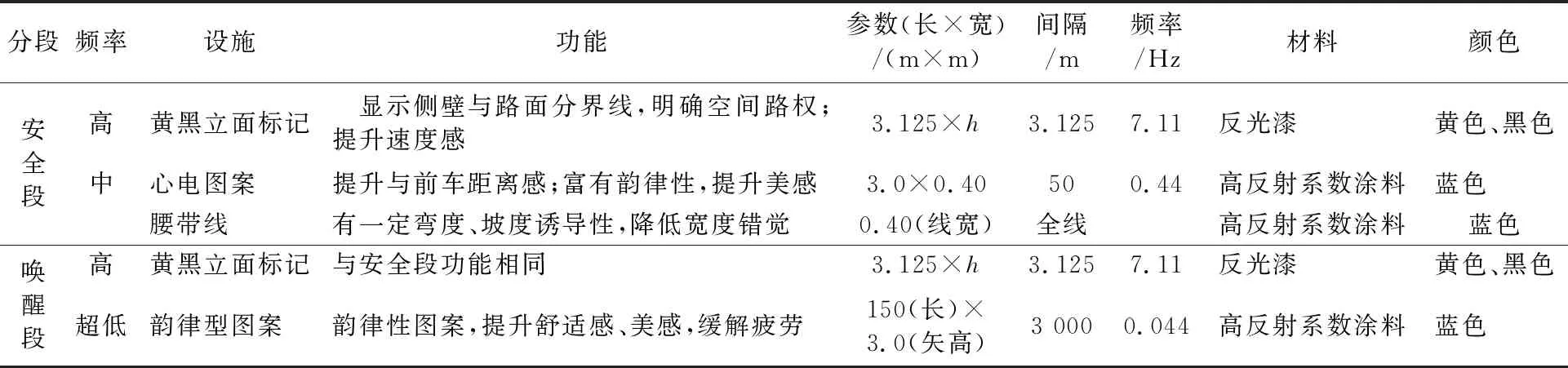
表1 城市水下特长隧道中部优化设计方法信息表
注:黄黑立面标记间隔-单个黄色或黑色标记长度;h-检修道外侧宽度;设施的时间频率-主线设计速度80 km/h的速度进行计算;3 km设置一段唤醒段,唤醒段长度-7 s行程150 m.
2 实验设计
在隧道中直接进行实车实验有较高的难度和危险性,且对于优化后的场景难以实施.因此,本文使用3DSMAX仿真软件搭建城市水下特长隧道实验场景,用E-prime软件对优化前后实验场景进行心理物理学实验,模拟驾驶员在隧道中部的行车过程,定量分析城市水下特长隧道中部光环境优化设计方法对驾驶员驾驶疲劳改善效果,并通过SPSS24和origin2017对实验数据进行统计学分析.
2.1 实验方法
实验共挑选20名驾驶员作为被试,其中男性测试者14人(70%),女性测试者6人(30%),高驾龄驾驶员共有16人,低驾龄驾驶员4人.
驾驶疲劳最直观的表现就是驾驶员反应时间的延长及判断错误和操作错误增多,进而导致驾驶员速度感知能力减弱,速度感知能力是道路交通安全的重要一环,超速是交通事故的主要原因之一,而超速主要是因为驾驶员对自身行车速度判断不准确[12],因此,以速度错觉程度和反应时间作为评价指标,定量分析优化设计方法对驾驶员驾驶疲劳的影响.实验中模拟视频时长为8 min,初始行车速度为70 km/h,在驾驶员驾驶车辆5 min后的10~150 s内随机发生速度变化(±10 km/h),驾驶员需要在速度变化后10 s内做出判断进行按键操作并口述感知速度,其中刺激与反应产生之间的时间间隔可以由E-prime软件自动记录.
2.2 实验流程
具体实验步骤如下:
步骤1在实验正式开始前,驾驶员需熟悉实验过程,并进行一段预实验,保证驾驶员熟悉测试设备及操作流程.
步骤2在电脑运行E-prime软件,在实验平台上播放仿真视频,开始模拟实验.
步骤3在开始播放实验前,设计一组倒计时为驾驶员提供准备时间,避免驾驶员分心未进入状态.
步骤4要求驾驶员目光直视视频中的道路前方,当发现行车速度发生变化时做出判断并按下操作键,系统将自动记录驾驶员的反应时间,速度判断结果由记录员记录.
步骤5每个视频结束后更换驾驶员进行下一组实验,本轮实验的驾驶员则休息等待;由E-prime软件输出实验数据,计算得到各组实验的反应时间
t=T1-T0
(1)
式中:T1为判断出速度突变的时刻;T0为速度突变的时刻
2.3 模型校核
虽然模拟实验场景与实际场景相比具有很高的还原度,但给驾驶员的视觉感受仍有差异,因此需要对模拟实验场景进行精度校核.试验中仿真场景与真实场景采用城市快速路普通路段,见图2.在速度模型校核试验中,真实场景车速为65 km/h,仿真场景车速为(65±20) km/h,利用极限法测得仿真场景车速为66.58 km/h,模型误差为-2.43%,在5%的误差允许范围,见表2.根据单样本T检验结果分析,双尾概率P为0.092,大于0.05,可以认为驾驶疲劳试验中仿真场景与真实场景不存在显著差异.因此,综上采用仿真模型场景进行试验是有效的.
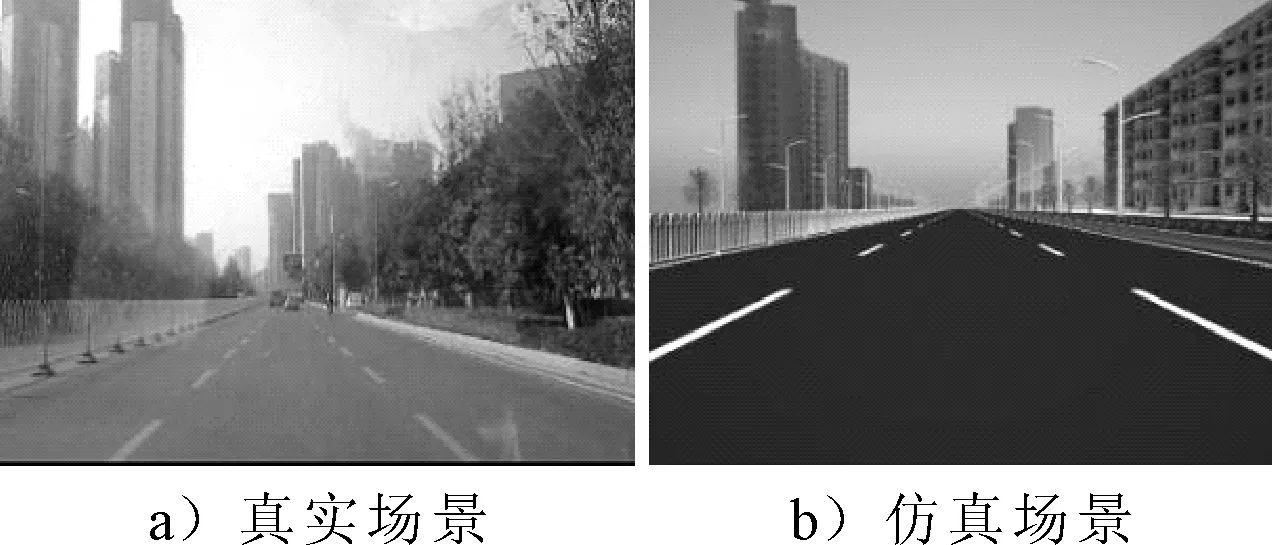
图2 实验模拟场景
表2 模型精度检验
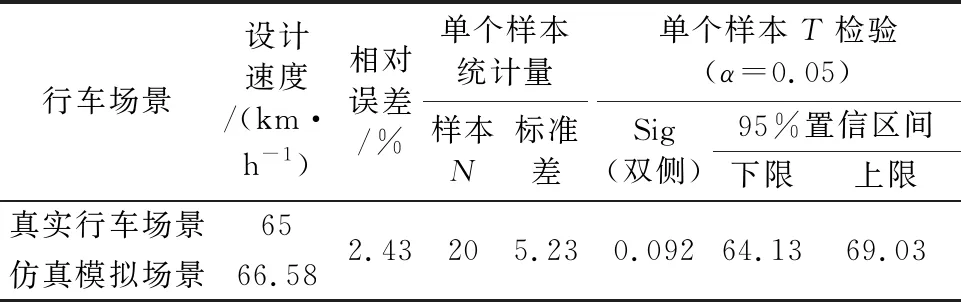
行车场景设计速度/(km·h-1)相对误差/%单个样本统计量样本N标准差单个样本T检验(α=0.05)Sig(双侧)95%置信区间下限上限真实行车场景65仿真模拟场景66.582.43205.230.09264.1369.03
2.4 实验场景设计
实验场景分为优化前实验场景和优化后实验场景,模型根据青岛第二海底隧道设置,隧道照明亮度为3.5 cd/m2,长15.8 km,设计车速80 km/h时,隧道高5 m,车道宽3.75 m,侧向宽度0.5 m.优化前实验场景是无侧壁信息的城市水下特长隧道中部场景,见图3a),优化后实验场景是设置侧壁诱导图案后的城市水下特长隧道中部场景,见图3b).
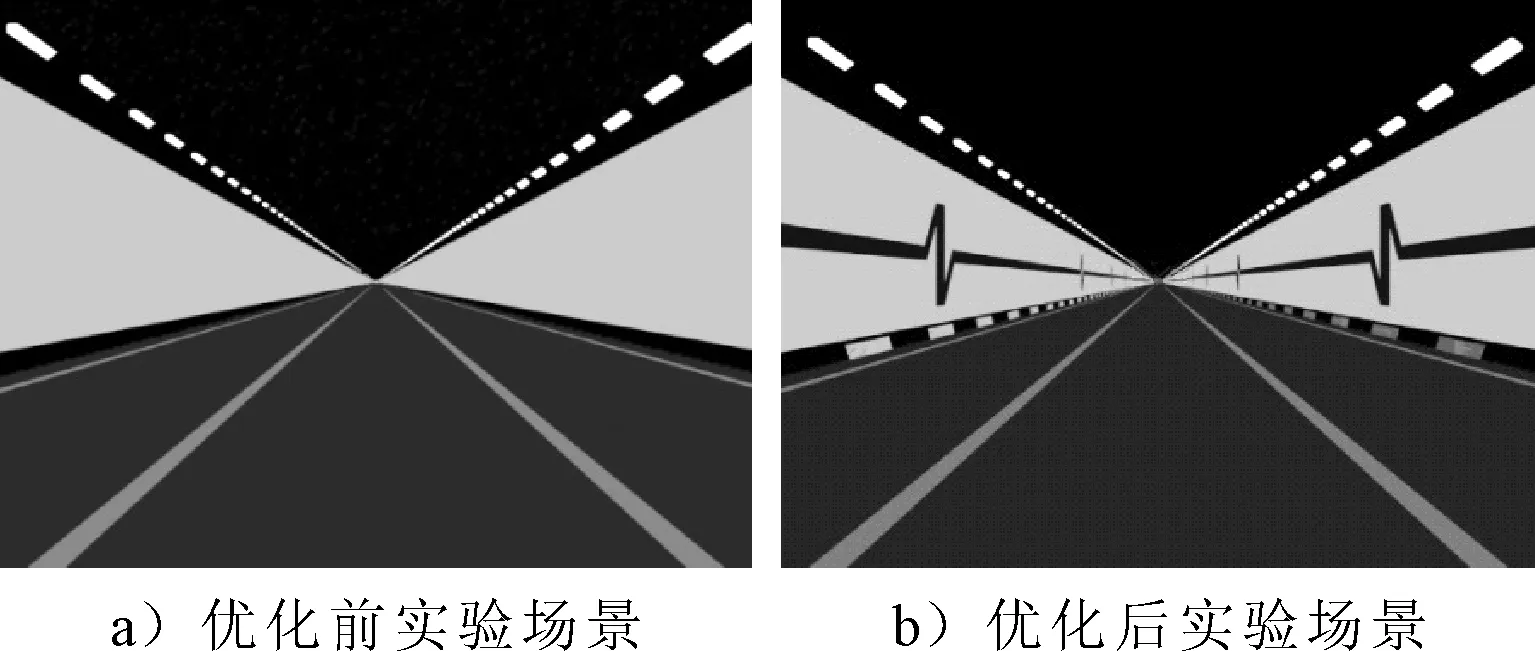
图3 优化前后实验场景
3 实验数据分析
基于E-prime平台开展室内仿真模拟实验,获取优化前后场景下驾驶员的速度判断错误率和反应时间数据,见表3.优化前后速度错觉程度和反应时间拟合曲线图见图4~5.
由图4可知:①驾驶员速度错觉程度随驾驶时间的增长呈上升趋势,表明驾驶疲劳生成会影响驾驶员的行车绩效,导致速度错觉程度加深;②比较优化前后驾驶员速度错觉程度,优化前驾驶员速度错觉程度在速度突变时刻40~60 s增长幅度最大,表明此时段内驾驶员疲劳累积程度加深;优化后在100~120 s增长幅度最大,表明优化后减小了驾驶员疲劳累积速率,驾驶员可保持相对较高的速度感知能力;③优化前后驾驶员速度错觉在速度突变初期(10~40 s)变化不大,但随着驾驶时间的增多,优化后驾驶员速度错觉程度较优化前降低1.80%~8.91%.
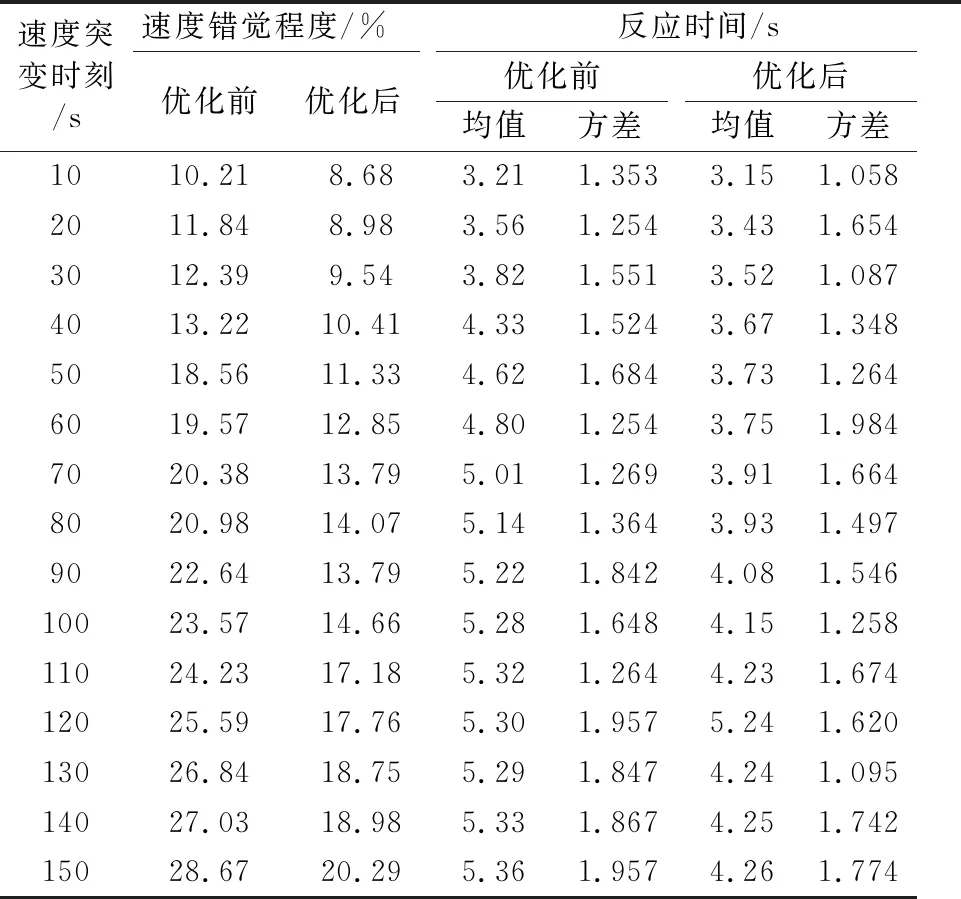
表3 城市水下特长隧道中部优化前后驾驶员速度错觉程度和反应时间

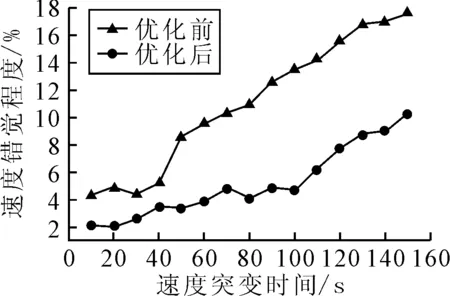
图4 优化前后速度错觉程度图
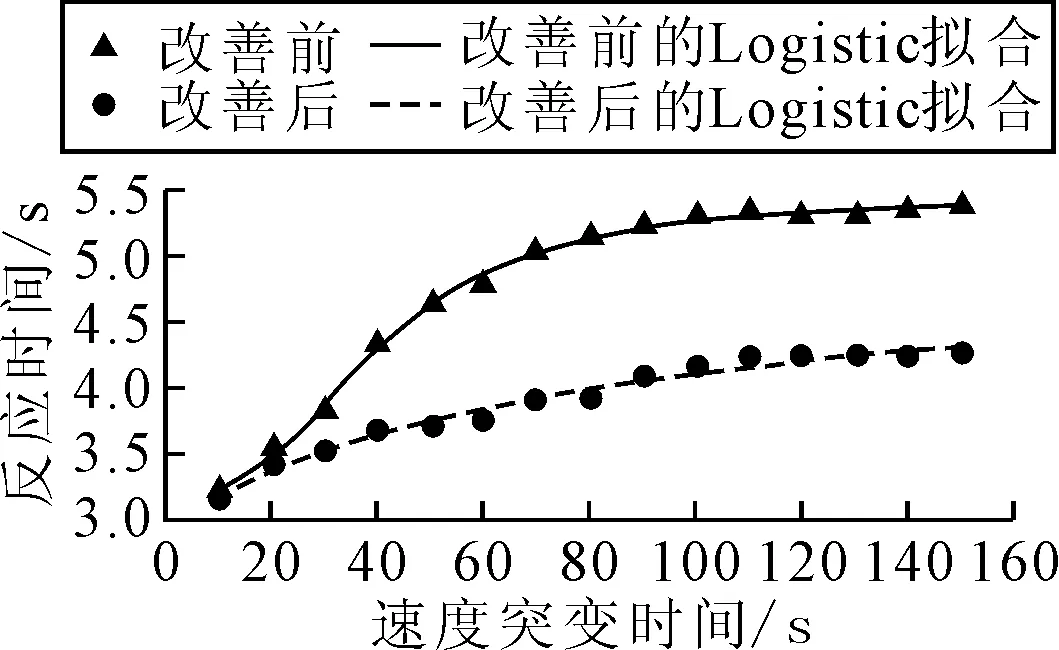
图5 优化前后反应时间拟合曲线图
利用origin2017对驾驶员的反应时间进行Logistic拟合分析,通过拟合曲线和相关系数R2(接近1)可以判断曲线拟合程度较高.拟合函数为
(2)
式中:A为反应时间;x为速度突变时刻;A1为曲线上渐近线估值;A0为曲线下渐近线估值;x0为反应时间变化的拐点;p为对应的斜率.
由表3和图5可知,优化前驾驶员反应时间随着驾驶时间的增多明显延长,说明在城市水下特长隧道中部存在明显的驾驶疲劳现象.在相同的驾驶时间条件下,优化后驾驶员反应时间与优化前相比减少0.06~1.21 s.
表4为优化前后反应时间拟合公式参数,通过logistic拟合公式的含义得知,拟合曲线拐点可以反映驾驶疲劳,即当某一时段拟合曲线出现显著性变化时,说明该时段驾驶产生疲劳.优化前后的反应时间变化拐点从40.39 s延后到108.44 s,与驾驶员速度错觉程度结果一致,表明优化设计方法可以延缓驾驶员驾驶疲劳生成.但当驾驶时间超过7 min(速度突变时刻120 s),优化前后驾驶员的反应时间差不再变化,表明随着驾驶时间的延长,优化方法的缓解作用有所削弱,主要是由于驾驶员对视觉刺激形成了视觉适应性,刺激敏锐度降低.
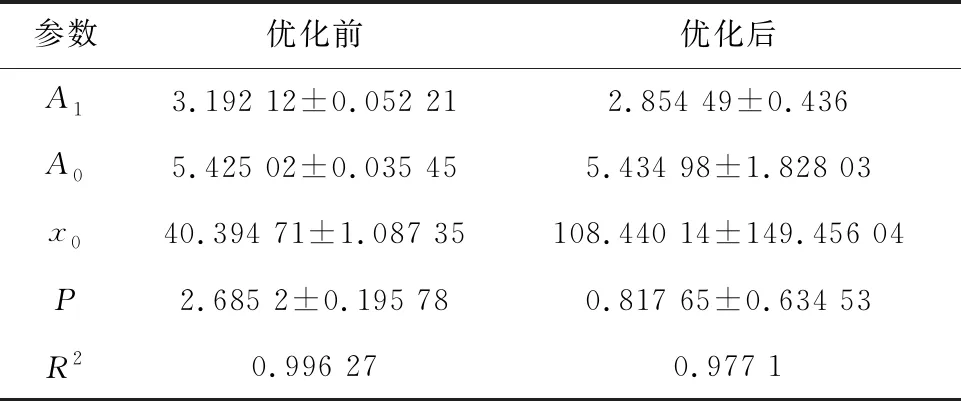
表4 优化前后反应时间拟合公式参数
4 结 论
1) 优化前驾驶时间的增加驾驶员速度错觉程度显著增长,表明城市水下特长隧道中部存在驾驶疲劳现象,驾驶员警觉性和操作灵活度降低;优化后驾驶员速度错觉程度降低1.80%~8.91%.
2) 驾驶员驾驶疲劳受到隧道视觉环境以及行车时间的综合作用,优化后驾驶员反应时间拐点向后延长约68 s,说明优化方法可以延缓驾驶疲劳生产;同时,在相同的行车时间下,优化后驾驶员反应时间比优化前减少0.06~1.21 s,表明优化方法阶段性给予驾驶员视觉刺激,能有效缓解驾驶员驾驶疲劳,提升驾驶员注意力,有利于隧道中部行车安全.
3) 驾驶时间超过7 min(根据行车速度计算得行程为9.33 km),优化前后驾驶员的反应时间差不再变化,表明该优化方法对驾驶员驾驶疲劳的缓解效果减弱,故在长度大于9.33 km以上城市水下特长隧道应考虑改进优化方法,这也是之后研究的重点.