动力定位自适应变论域模糊PID控制器设计*
2020-06-03黄羽韬徐海祥余文曌李文娟朱梦飞
黄羽韬 徐海祥 余文曌 李文娟 朱梦飞
(武汉理工大学交通学院1) 武汉 430063) (武汉理工大学高性能船舶技术教育部重点实验室2) 武汉 430063) (江苏科技大学海洋装备研究院3) 镇江 212003)
0 引 言
随着对海洋资源开发的逐渐深入,传统的锚泊定位方式已经无法满足深远海域定位作业的要求,而动力定位系统凭借其定位精准度高、机动性强、不受水深限制等优势而越来越多的应用到各类船舶[1].动力定位系统是非线性、不确定性系统,动力定位船舶在水面作业时,通常会受到风、浪、流等时变的外界环境干扰,因此,对于如何应对海上复杂的环境,克服不确定性系统模型的影响,从而实现动力定位船舶安全,高效的作业,引起了专家学者的重视.
对于这类系统的控制问题,最普遍的方法是使用PID控制器.PID控制具有结构简单、稳定性能好等优点,然而传统PID控制器由于其参数难以确定,通常需要在实验中通过试凑法整定出可行参数,且一旦参数固定后,难以应对变化的海况,控制效果往往不佳[2-4].模糊控制器的模糊推理算法通常有两种,即Mamdani型和T-S型.T-S型模糊系统的输出量需要获得线性方程,这在工程实际中难以获取.Mamdani型模糊系统,模糊规则前件和后件均为模糊语言,利用反模糊化过程得到精确输出值,在工程实际中应用广泛.文献[5]中建立了模糊控制器与传统控制器的分析解关系,尤其是证明了Mamdani模糊PI(或PD)型控制器是具有变增益的非线性PID控制器,为模糊控制与PID控制的融合提供了基础.通过引入模糊数学思想,使系统可以实时对PID参数进行整定,但一定大小的论域内模糊变量的量化等级有限,量化等级过多会增加控制器结构复杂程度,影响计算和控制速度;量化等级过少会使控制器不够敏感,影响控制精度.此外传统模糊PID控制器的模糊论域、控制规则和隶属度函数在整定过程中固定不变,使PID参数的调节精度不高,控制效果在一定范围内也不理想[6-7].李洪兴等[8-10]首次提出了变论域思想,旨在模糊规则形式不变的情况下,通过自适应调节伸缩因子,当误差较大时使论域膨胀,加快控制系统响应速度;当误差较小时使论域收缩,其效果等同于增加模糊规则,局部加密模糊控制器插值点,使模糊控制器在结构复杂度不变的条件下,提高了灵敏度,然而论域变化的合理规则仍然需要进一步的研究.
为提高动力定位船舶控制器性能,解决在线参数整定过程中速度和精度的问题,本文结合低航速下定点定位工作模式的控制需求,引入了时变模糊论域思想,设计了一种自适应变论域模糊PID控制器,在保持原控制器简单结构的基础上,优化了PID参数的在线自整定过程,并通过Matlab仿真,实现了突变海况下对动力定位系统的控制,对比了相同工况下模糊PID控制器的控制效果.
1 动力定位船舶数学模型
1.1 运动学模型
为了描述船舶的运动,采用图1的固定坐标系O0-x0y0z0和运动坐标系o-xyz.

图1 船舶固定坐标系与运动坐标系
对于动力定位船舶,在横摇角和纵摇角很小的情况下,其运动可以简化成三个自由度的表达式,即横荡、纵荡和首摇.其运动学表达式为

(1)
式中:η=[xyψ]T为位置矩阵;R(ψ)=[cosψ-sinψ0;sinψcosψ0;0 0 1]为坐标转换矩阵;ν=[uvr]T为速度矩阵.
1.2 动力学模型
对于船舶低航速运动情况下三自由度动力学模型,本文采用分离型数学模型,即采用在静水MMG操纵运动方程中叠加二阶波浪力来建立船舶动力学模型.其表达式为
(2)

因此,动力定位船舶低频数学模型可表示为
(3)
2 变论域模糊PID控制器
2.1 模糊PID控制器设计
本文采用Mamdani型模糊PID控制器,根据不同时刻输入的偏差e和偏差变化ec,利用模糊控制规则对PID参数进行实时更新,以满足不同e和ec情况和不同海况下对于控制精度和响应速度的不同要求,提高被控对象的动态性能.输入变量e,ec,输出变量Kp,Ki,Kd对应的模糊变量均设置为3个,采用高斯型隶属度函数.其模糊规则见表1~3.

表1 输出变量Kp模糊规则
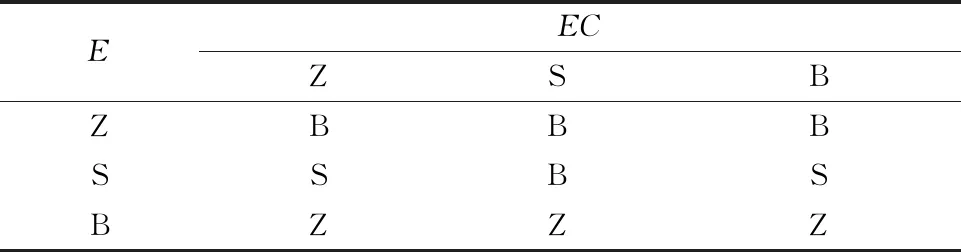
表2 输出变量Ki模糊规则
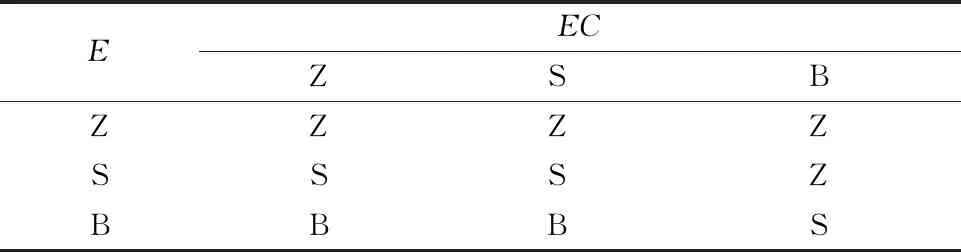
表3 输出变量Kd模糊规则
模糊化后的输入变量e,ec,经由模糊规则采用Max-Min模糊推理算法进行模糊推理后,得到Kp,Ki,Kd的模糊量,再利用面积中心法进行反模糊化,最终得到计算机可识别的精确量,对船舶进行控制.
2.2 变论域模糊PID控制器设计
模糊控制器在实际应用中有其局限性:模糊变量数量有限,模糊规则表在控制器运行过程中无法改变等.变论域思想则克服了上述局限性,其原理是在规则形式不变的前提下,设计伸缩因子,使模糊论域随着伸缩因子的改变而自适应调整.假设α,β,γ分别为输入论域[-E,E],[-EC,EC]和输出论域[-U,U]的伸缩因子,当e和ec较小时,利用伸缩因子α∈[0,1]将输入论域[-E,E]变换为[-αE,αE],使论域收缩,定义在论域上的模糊变量划分变密,等效于增加模糊规则,实现更精确的控制;当e和ec较大时,利用伸缩因子α∈[1,∞)使论域膨胀,加快系统响应速度.论域变化示意图见图2.
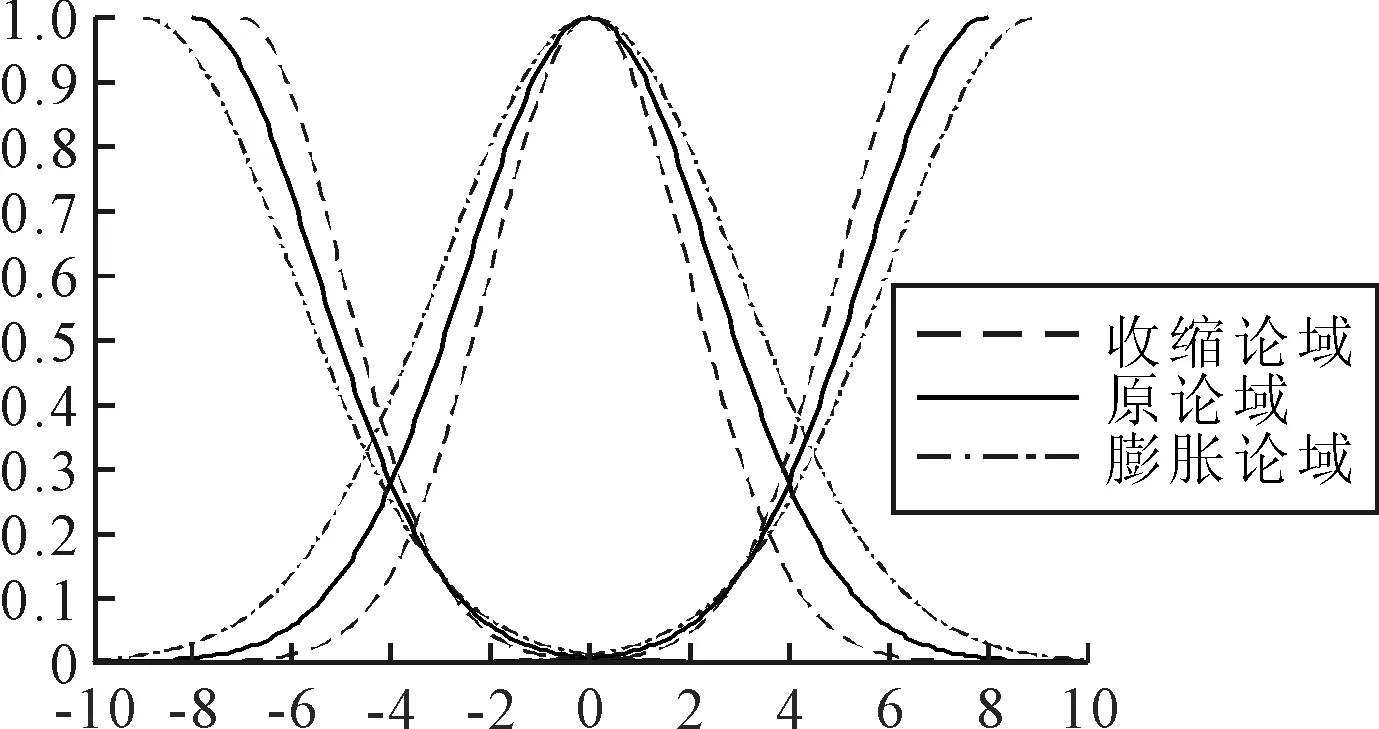
图2 论域变化示意图
本文采用常规Mamdani型模糊PID控制器加入受自适应伸缩因子影响的变化论域的方法,整个控制器通过两次寻优过程,第一次寻优过程,建立伸缩因子规则库对伸缩因子进行自适应优化整定,即找到参数的合适论域范围,对PID参数进行粗调;第二次寻优过程,在模糊控制器中运用模糊推理对PID参数进行细调,在合适范围内整定精确参数,实现控制器参数的自适应优化.动力定位船舶变论域模糊PID控制系统的原理框图见图3.
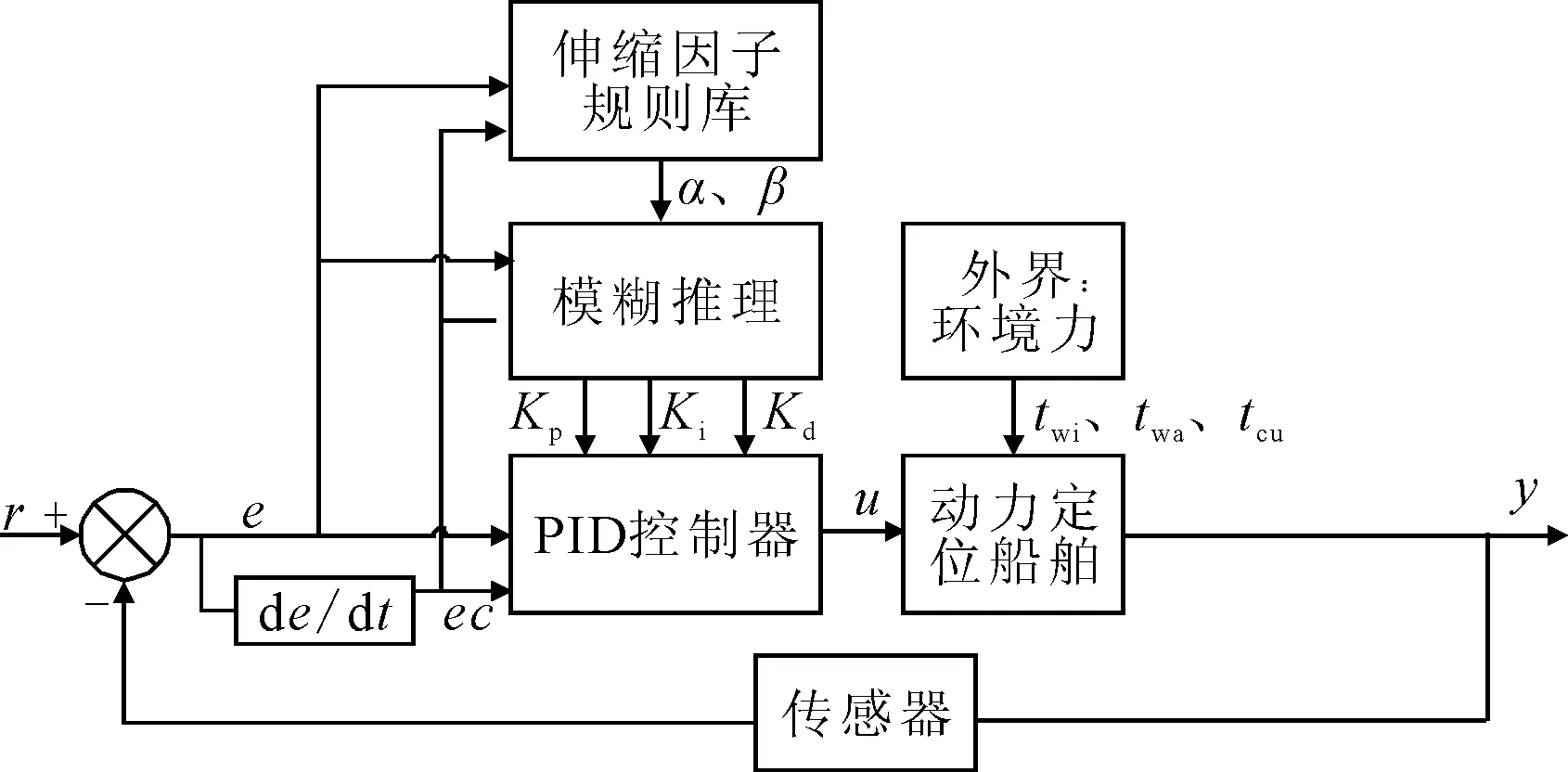
图3 自适应变论域模糊PID控制原理
控制器设计的关键在于确定伸缩因子规则库,使论域随着e和ec进行合理的动态变化.本文采用自适应智能优化法,选择基于模糊规则的伸缩因子,运用知识和操作经验总结的语言来描述.输入论域规则设计的基本思想如下:当e和ec较大时,为了保证系统快速上升逼近目标,其论域也应保持较大,即采用较大的伸缩因子;当e和ec较小时,为了保证系统的控制精度且避免超调,其论域采取相应收缩,以此削弱了模糊规则数量与控制精度之间的矛盾.其模糊规则见表4.
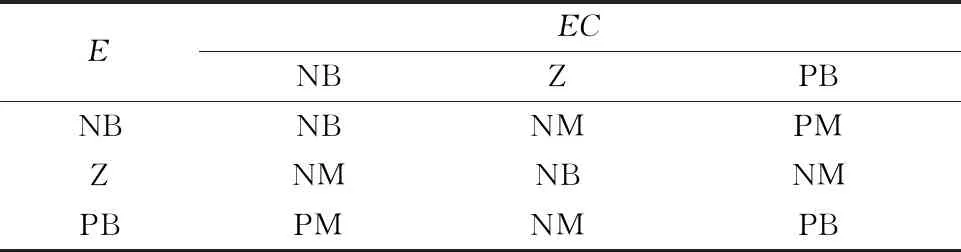
表4 输入论域伸缩因子规则
输出论域规则设计的基本思想如下:当e和ec较大时,系统当前值和目标值偏差较大,且偏离的速度较快,此时应保持较大的输出,进行误差的快速控制,输出论域应保持较大;当e较小,ec较大,且方向相反时,系统偏差较小,但偏离目标值速度较快,此时应保持较大的输出,以此削弱偏离趋势,输出论域应保持较大;当输入变量e较小,ec较大,且方向相同时,系统偏差较小且逼近目标值速度较快,此时应合理减少输出量,进行精确调整防止超调,其论域采取相应收缩.其模糊规则见表5.
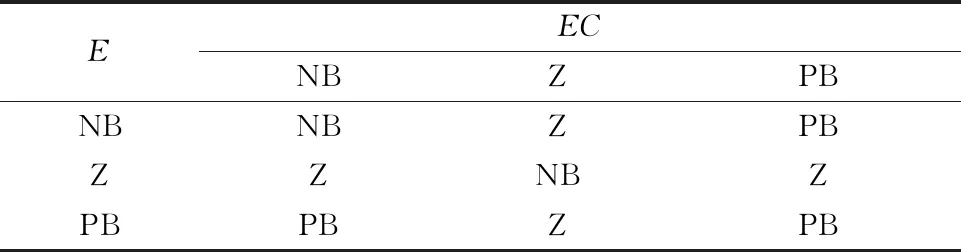
表5 输出论域伸缩因子规则
3 仿真结果与分析
为验证本文所设计的自适应变论域模糊PID控制方法的有效性,以一艘动力定位船舶为仿真对象,以Matlab为仿真环境,对模糊自整定PID和自适应变论域模糊PID控制算法进行了分析对比.
仿真模拟水面船舶定点定位作业过程,设置的采样周期为0.2 s,初始位置η0=[0 0 0]T,目标位置ηt=[20 20 40]T,并且在300~320周期时加入外力τwi=[0.2,0.4,0]T,模拟突增的环境载荷.设变量e和ec的基本论域分别为[0,40]、[0,2],映射到模糊论域的量化因子分别为0.5,3,输入论域的伸缩因子分别为α1和α,模糊论域均为[0,4.5],映射到基本论域的比例因子均为1.5,设输出变量Kp,Ki,Kd论域的伸缩因子分别为β1、β2和β3,模糊论域均为[0,3],映射到基本论域的比例因子分别为1.1,0.6,0.5.该动力定位船舶的惯性矩阵和阻尼矩阵分别为
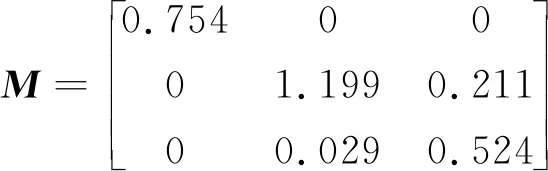

图4~6为船舶定点定位工况加入突增环境力后各方向上的运动及参数变化过程.
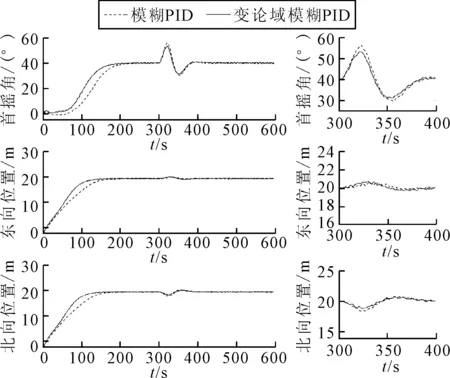
图4 船舶各方向运动位置

图5 船舶定位轨迹
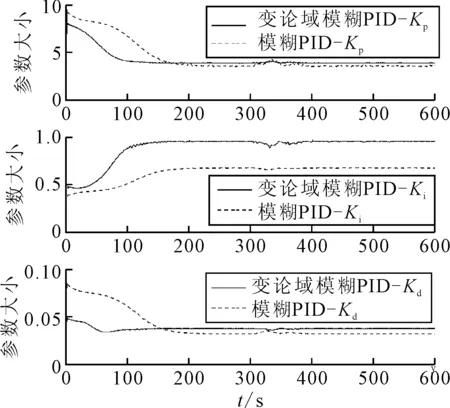
图6 PID参数变化
由图4~6可知,阶段I(0~75 s)位置和首向偏差较大,要求控制船舶迅速进行调整,此时参数Kp占主导地位,所以控制器自整定的Kp较大且变化较快,而由于动力定位船舶数学模型横向与首向相互的耦合作用,所以处于此阶段的船舶首向变化较慢.阶段II(75~150 s)位置和首向偏差逐渐减小,船舶处于即将到达目标位置和首向的状态,要求速度减缓且没有或少量超调,所以此时控制器自整定的PID参数变化缓慢.阶段III(150~300 s)船舶已到达目标位置和首向,此时控制器自整定的PID参数保持不变,船舶完成定位作业.阶段IV(>300 s)加入突增环境力后,船舶各方向位置发生变化,控制器受到扰动后对参数进行快速调整,使船舶在一定时间后返回目标位置继续作业.
仿真过程中船舶运动参数对比见表6,初始定位速度提升约21.0%,抵抗外界环境力调节时间缩短约14.4%,超调量减少约10.1%,位置精度保持1.5%以内不变.
由表6可知,当加载同样大小环境力时,本文所设计的变论域模糊PID控制器对动力定位船舶的运动控制减少了超调量、加快了响应速度、缩短了调节时间,即加入自适应伸缩因子后提高了PID参数的自整定精度,在保持零超调或微超调的基础上,改善了原模糊PID控制器的鲁棒性和自适应能力,增强了控制系统抗外界干扰能力,能够很好地满足动力定位船舶定位工况的控制要求.
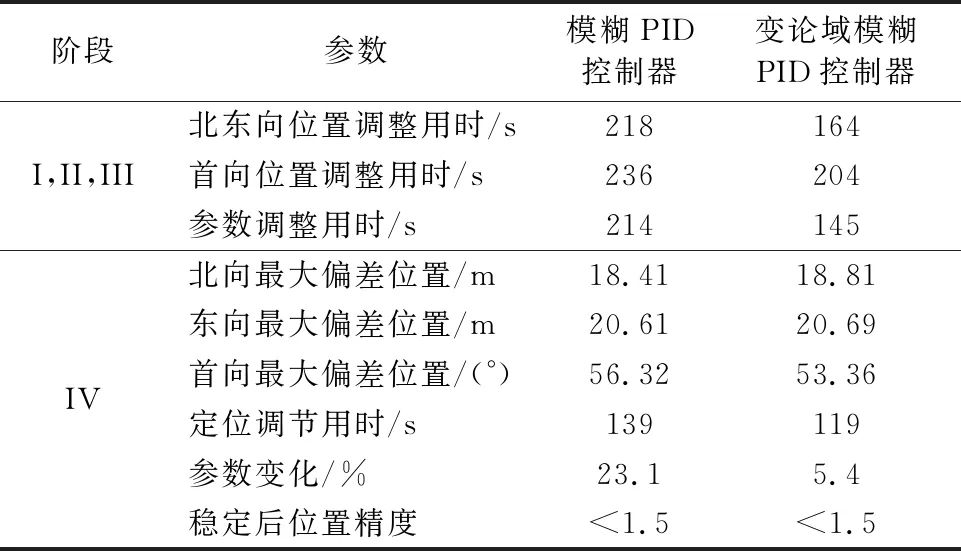
表6 船舶运动参数对比
4 结 束 语
本文针对动力定位船舶非线性、不确定性控制系统的PID参数整定精度问题,考虑到传统模糊控制器的模糊控制表的量化等级有限,且控制规则和隶属度函数固定不变,引入了自适应变化论域思想,设计了自适应变论域模糊PID控制器,进而实现了环境力突变情况下动力定位控制系统PID参数更快速和精确的在线调整.仿真结果表明:该方法能够有效地减少调节时间,控制超调量,保证高精度定位,提高控制系统的自适应能力和鲁棒性,从而能高效地完成动力定位船舶在突变海况条件下的精准定位作业.
