基于人机交互的界面故障数据属性识别方法*
2020-06-03王素丽
王素丽
(华南理工大学广州学院 计算机工程学院, 广州 510800)
设备界面是很多电子设备的重要构件,界面故障会导致电子设备无法人工操控[1],并且一旦界面出现故障,会带来很多衍生问题.识别设备界面故障数据属性可为检测故障类型及故障维修提供重要依据,检测并分析故障属性是界面设备正常运行的重要前提[2-3],识别设备系统故障数据属性势在必行.
段礼祥等[4]针对设备故障数据识别,将加权支持向量机(C-SVM)引入至故障数据属性识别中.综合考虑数据样本之间距离、故障数据类内距离及不均衡性等问题,对二叉树结构进行优化,实现最终故障数据属性识别,但该方法识别精度较低.王浩亮[5]提出基于移动学习的海量光纤断点故障数据识别方法,设计了一种适用于高频与低频信号的去噪函数,通过增加信号转换断接振幅的方法实现海量光纤断点故障识别.该方法的识别率较高,但整体过程较为复杂.为有效解决当前相关方法中的问题,本文提出了基于人机交互界面的故障数据属性识别方法.
1 故障数据属性识别
1.1 故障数据采集
为采集界面故障数据,可利用计算机来辅助完成,具体操作步骤为:界面故障数据信号经AD转换之后,传输至DSP中进行处理,并将处理结果缓存至双口RAM中,再利用USB传送至CF卡中存储.数据采集过程中,DSP是主控制器,主要功能为采集和处理及显示指令与数据传输情况,还能够处理小键盘中使用者指令.LCD显示与小键盘合并构成数据采集体系的人机交互模块,小键盘便于使用者的指令输入与控制.
1.2 故障数据噪声提取
本文通过离群熵检测故障数据噪声,并对其进行提取.在特定的数据集合S中,假设噪声数据集为O,则正常数据集为S′=S-O.计算离群熵,取正常噪声数据集O和数据集S′,其中各个数据需要获取数据每一维属性的信息增益,而通过对样本进行训练即可准确地得到各个属性的增益.在开始进行噪声检测时,先对一个包含正常数据和噪声数据的训练集进行分析,从而获得各个属性的信息增益.本文设计的数据噪声检测提取过程如图1所示.
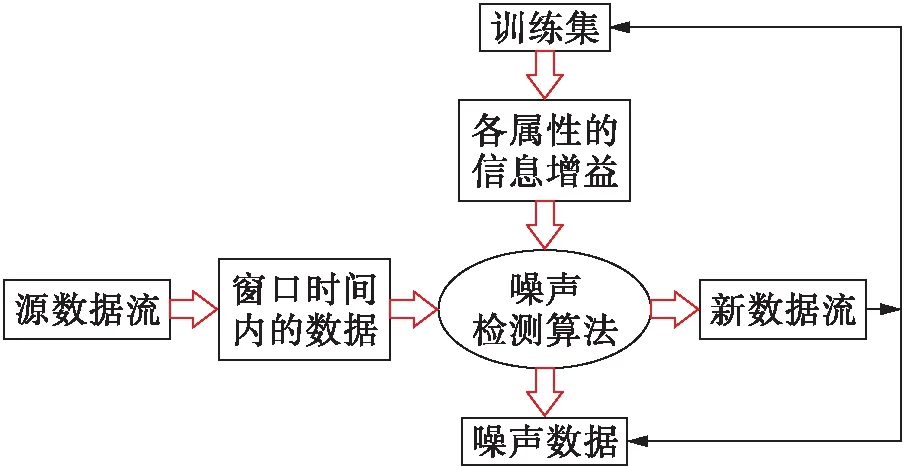
图1 噪声检测框图Fig.1 Block diagram of noise monitoring
1.3 数据消噪
1.3.1 消噪处理
故障数据消噪是提高数据属性识别精准性和降低识别复杂度的有效操作.依据数据功率谱存在的特性可将其中的噪声划分成白噪声与有色噪声[6].在界面故障识别与诊断过程中,故障数据采集量化误差是一定会存在的.当输入的故障信号比较复杂且量化时间间隔比较小时,量化误差值可以当作一个均匀分布下的平稳白噪声数据.在界面中,可能还存在各种谐波,这些谐波频谱主要集中在某一个点或者某些频率点,这就导致谐波高频分量比较丰富,隶属有色噪声.
当前比较常用的消除和抑制噪声的干扰滤波法为自适应滤波法和最优估计法.此类噪声消除法虽然在一定程度上降低了噪声,但也使故障信号峰值变得平滑,而峰值中一般会包含故障类型的关键信息[7].综上,在进行故障检测与诊断过程中,采用上述方法消噪会影响故障判断.
小波分析能够对信号时域、频域并行分析,可有效将信号中突变信号与噪声信号分离,故将其应用在界面故障数据消噪中.利用小波分析法去除白噪声的主要步骤如下:
1) 针对含有白噪声的界面信号实行多尺度的小波变换.通常情况下采用二进小波等母小波函数,多尺度小波在分解过程中,尺度变化一般会选择指数变化分布规律,也可采用多分辨率分解方式.尺度的分解层数一般定义为3~4.
2) 在各尺度上找到模极大值所在位置.
3) 判断各模极大值位置是否为奇异点或白噪声.根据尺度变化呈现出的规律可知,奇异点模极大值会在两个邻居尺度分解层次间随着尺度不断增大而增大,设模值间比值为a,则在实际判断过程中,可取值定义为(0.85~1)a.根据模极大值位置判断各模极大值为奇异点或白噪声.将各模极大值和其他各个层次相对应位置的模极大值进行对比,大于各个模极大值都是信号奇异点;反之则是白噪声[8].保存各尺度上奇异点相应模极大值,并将各尺度的噪声模值定义为0,以此消除白噪声.
4) 对消除白噪声后的小波分解最终结果实行重构操作,以此获取的信号即为白噪声抑制和清除之后的原始信号.
依据上述过程即可将数据中的白噪声消除,并将奇异点保存.界面数据信号中存在有色噪声,但利用上述方式无法很好地去除.界面故障数据属性识别过程中,有色噪声去除相应举措如下:
1) 假设已经掌握有用信号数据频谱范围,那么将包含噪声的原始数据进行小波分解,并在分解最终结果中,将有用频谱范围内的数据信号保留下来,其他强制设置为0,再将小波重构结果当作原始信号去噪后的真实信号.
2) 假设已经得到噪声信号频谱的整体波动范围,且其与真实信号频谱波动范围无重叠现象,则对包含噪声的信号实施小波分解操作,然后将噪声频谱范围中的所有信号强制设置为0,再重构信号,并将最终结果定义为去噪后真实信号.
1.3.2 消噪信号离散化处理
假设存在一维观测信号,其表达式为
f(t)=s(t)+n(t)
(1)
式中:s(t)为界面原始信号,n(t)为方差是σ2的白噪声.对式(1)中的f(t)进行离散化处理,获取N点离散信号f(n),n=0,1,…,N-1,则其小波变换可表示为
(2)
式中:W(j,k)为小波系数;k为波数;j为常数.实际应用过程中,式(2)计算较为繁琐,且小波函数通常无显著性表达,故本文将小波变换采用递归形式表达为
S(j+1,k)=S(j,k)h
(3)
W(j+1,k)=W(j,k)g
(4)
式中:h、g为与尺度函数φ(t)、小波函数ψ(t)相对应的低通与高通滤波值;S(j,k)为尺度系数,则对应信号重构表达式为

(5)

1.4 滑动窗口下故障数据属性识别
1.4.1 滑动窗口设置
在故障数据属性识别过程中,由于故障数据之间具有相似性,故采用滑动窗口技术来区分.在滑动窗口中滑过的数据集合可以通过一个三维数据矩阵X(I×J×K)描述,I为变量数,J为采样点数量,K为批量数量,本文将该矩阵展开为二维矩阵形式X′(I×K),数据矩阵分块示意图如图2所示.
滑动窗口技术主要是通过一个动态性可调整的窗口对所有工况样本进行控制,并以此反映出工况的变化,还能够控制样本集合的大小,可有效提升故障数据属性及识别查全率.
1.4.2 故障数据属性相似度计算
利用滑动窗口对故障数据相似性分析的过程如下:
1) 对去噪的海量数据进行分块,并将窗口长度设置为L′,阈值设为η1和η2.
2) 对窗口进行更新,选取窗口中的所有数据,将窗口数据的主成分矩阵设置为M′.采样少
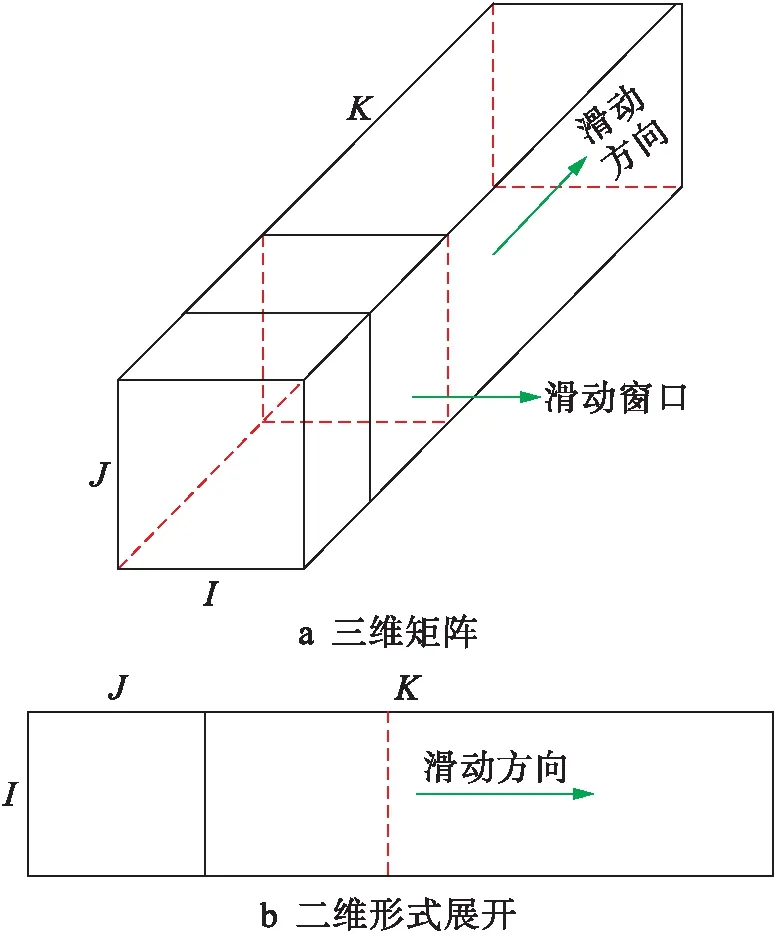
图2 故障数据矩阵分块示意图Fig.2 Schematic partition of fault data matrix
数类样本,构建待选数据属性池,并将相对应的主成分矩阵定义为T′.
3) 计算目标数据和窗口数据主成分相似性因子,即
(6)
式中,k′为故障数据集合中最重要的主元数量.将式(6)计算结果与阈值η1进行对比,若SP>η1,则将窗口数据保存至待选数据缓存池中;若SP<η1,则重复步骤2).
4) 计算目标数据和待选数据之间的距离相似因子Sd,即
(7)
式中:e为噪声离散值;z为窗口平滑参数.将式(7)计算结果与阈值η2进行对比,若Sd>η2,则将故障数据归纳至相似属性数据集合中;若Sd<η2,则重复该步骤,一直到所有故障数据归纳至相对应的数据集合中.
2 实验结果与分析
本文仿真实验环境为:电脑配置为Windows7、64位操作系统,硬盘内存容量为1 TB,Intel Core-i5处理器;在Powerbuilder 9.0软件上进行故障数据识别测试,选取150个软件自带的ASA后台数据库(adaptive server anywhere 8.0)数据作为测试样本,形成一个完整的界面故障数据属性识别体系.在开展故障数据属性分析过程中,将待识别的原始故障数据样本传输至故障数据属性识别体系中,各测试样本均与一个输出向量相对应.所设置的实验参数为:单阶低通与高通滤波器的衰减率分别为每倍频6 dB,每十倍频20 dB;电阻为1 000 Ω,电容为0.1 μF,截止频率为159.3 Hz;尺度系数为1,小波系数为1.5;窗口长度为 2cm,阈值η1为35,阈值η2为50;实验过程中,以识别复杂程度、识别精度及查全率为实验指标对方法可行性进行验证.
2.1 识别复杂度对比
复杂系数具体计算公式为
(8)
式中:TS为识别数据实际耗时;Tv为单位识别数据耗时定额.仿真得到的不同方法识别复杂系数结果如图3所示.
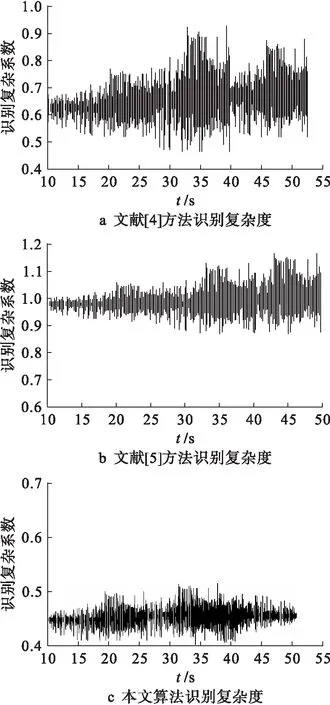
图3 不同方法识别复杂度对比Fig.3 Comparison of recognition complexity with different methods
图3中,本文方法数据属性识别方法复杂系数明显小于其他文献方法,识别复杂系数介于0.4~0.52之间;文献[4]方法在运行过程中,对数据存在的噪声信号等方面考虑较少,噪声信号增加了识别复杂度,导致文献[4]方法的识别复杂系数介于0.47~0.92之间;文献[5]方法由于算法步骤复杂,导致整体识别复杂度在0.9~1.2之间.本文方法利用人机交互的形式采集数据,并采用小波分析法对其中的噪声信号进行抑制与清除,为降低故障数据属性识别复杂度提供了有利依据.
2.2 识别精度对比
识别精度D是表示故障识别结果与故障真实情况的接近程度,其计算表达式为
(9)
式中:GS为准确识别故障属性个数;GV为总体故障个数.仿真得到的不同方法识别精度对比结果如图4所示.

图4 不同方法识别精度对比Fig.4 Comparison of recognition accuracy with different methods
由图4可知,与其他方法相比,本文方法运行准确率呈现出了很强的优势.文献[4]方法的识别精度波动较大,平均识别精度在53%;文献[5]方法的识别精度可稳定在75%左右;而本文方法平均识别精度可达91%.本文方法采用滑动窗口进行界面故障数据属性识别,该技术通过一个动态性可调整的窗口对所有工况样本进行控制,不仅能够反映出工况产生的变化,还能够控制样本集合的大小,有效提高了故障数据识别精度.
2.3 查全率对比
查全率R表示识别出相关的故障数据量与总量的比率,其计算公式为
(10)
式中:HS为识别故障数据个数;HV为数据总量.仿真得到的不同方法查全率对比结果如图5所示.

图5 不同方法查全率对比Fig.5 Comparison of recall rates with different methods
分析图5可知,本文方法平均查全率可达到95%,而文献[4]方法查全率均在80%以下,文献[5]的方法查全率可达到90%,但不稳定.本文方法将采集到的数据噪声信号划分成有色噪声和白噪声,并利用小波分析法进行了剔除,在提高识别精度的基础上,对于无噪声干扰的数据进行识别,能够增加故障数据属性识别查全率.
3 结 论
界面故障数据属性识别一直是设备检修与维护的重点研究方向,为更好地解决当前方法存在的问题,本文提出基于人机交互的界面故障数据属性识别方法.故障数据属性识别过程中,利用人机交互技术采集数据,结合计算机操作来辅助完成界面故障数据的采集,有效快速提取故障数据,解决传统方法数据提取慢的问题.在去除数据噪声时,考虑到数据流的动态性,结合滑动窗口实现数据属性分类识别,提高数据流的传输速度,实现数据属性分类识别.实验结果表明,所提方法性能较为完善,具有可行性.
