基于视觉与IMU融合的机器人位姿修正方法研究
2020-05-31王晓云
王晓云
(安徽信息工程学院,安徽 芜湖 241000)
随着智能控制技术的发展,双足机器人的自主控制能力不断提升[1]。双足机器人的智能控制建立在位姿修正的基础上,采用空间三维位姿参数分析方法进行双足机器人的远程遥控控制,能够提高机器人的自适应控制能力。由于在对双足机器人进行自动化控制过程中,容易受到机器的环境因素的干扰,导致双足机器人的位姿修正效果并不好[2]。为了提高双足机器人的位姿修正效果,本文提出基于视觉与IMU融合的机器人位姿修正方法。构建机器人位姿参数分布模型,利用视觉与IMU融合方法进行自主遥控双足机器人的结构参数辨识模型构建和位姿修正,最后进行仿真测试,展示了本文方法在提高机器人位姿修正能力方面的优越性能。
1 机器人动力学模型和位姿参数寻优
1.1 构建自主遥控双足机器人动力学模型
为了实现自主遥控双足机器人位姿修正优化,需要采用姿态传感器构建机器人的运动姿态参数模型[3],结合嵌入式逻辑控制方法进行机器人的运动学模型设计,得到自主遥控双足机器人位姿修正的结构模型如图1所示。
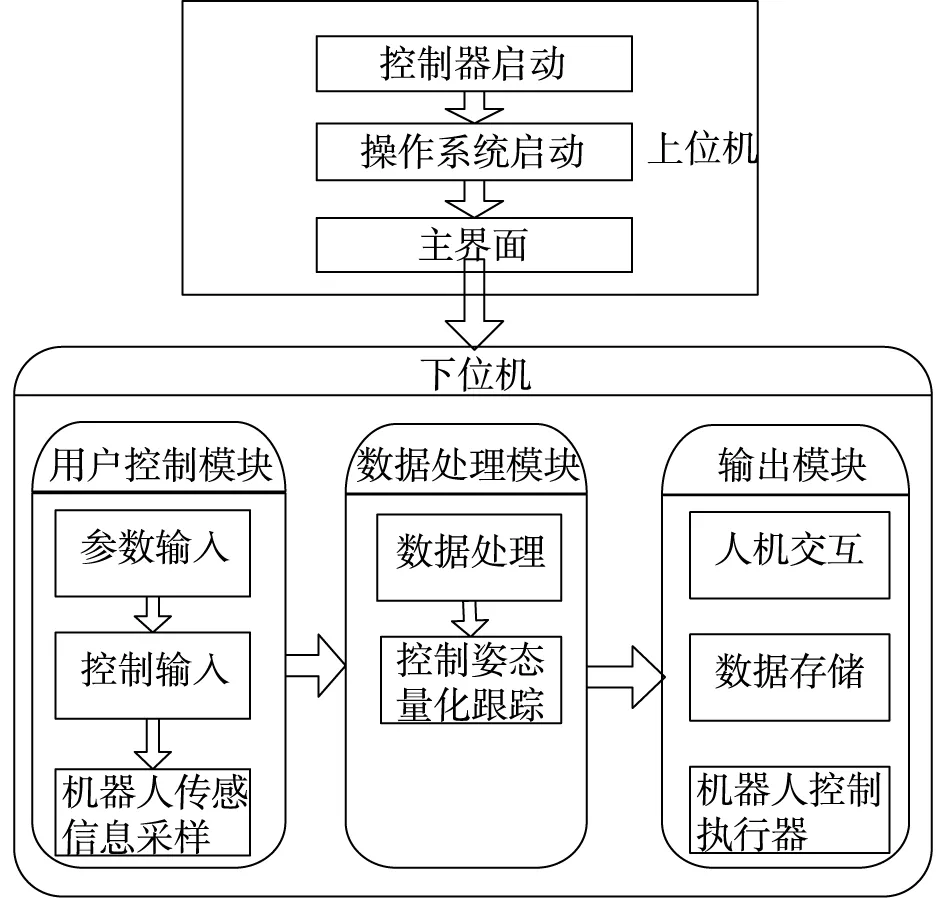
图1 自主遥控双足机器人位姿修正的结构模型
以图1所示的自主遥控双足机器人位姿修正的结构模型为基础,采用视觉特征信息采样方法进行机器人位姿信息采集[4],结合标准卡尔曼滤波模型,构建自主遥控双足机器人控制模糊迭代方程为:
(1)
假设自主遥控双足机器人的末端位姿分布是一个运动模型,根据模糊荷载参数融合方法,得到机器人的反馈调节模型为:
(2)
(3)
构建自主遥控双足机器人的动力学模型,表示为:
(4)
1.2 位姿参数寻优
采用三维视觉信息跟踪识别方法进行自主遥控双足机器人的运动学模型的优化设计[6],构建机器人动力学模型f(x)是关于x=WVD(n,k(n))的关节力矩增益控制函数,因此机器人的空间视觉特征参数分布满足:
δ·p1-2p2+ρ2A2-δρ1A1+c2+cr=0
(5)
ρ2(p2-c2-cr)-δ·(1-δ)μ2A2=0
(6)
(7)

(8)
采用自适应参数控制方法,进行自主遥控双足机器人的模糊度控制,得到位姿优化参数m(A)满足:
(9)
(10)
2 机器人的位姿修正优化
2.1 机器人控制误差补偿
采用三维视觉信息跟踪识别方法进行自主遥控双足机器人的运动学模型的优化设计,构建参数辨识模型,得到机器人的运动平面,其状态函数为:
(11)
考虑系统刚体特征,进行机器人的视觉参数调节,得到自主遥控双足机器人位姿修正的线性化处理模型为:
(12)
其中,自主遥控双足机器人位姿修正的稳定性平衡点满足:
(13)
根据线性化优化控制结果,进行自主遥控双足机器人的模糊参数优化辨识[9-10],得到辨识函数为:
(14)
结合耦合状态寻优方法,进行自主遥控双足机器人的控制误差补偿,得到控制误差补偿模型满足:
(15)
当([pHj,pLj])⊆([pHi,pLi])时,在该工作点处进行平衡控制状态。
2.2 位姿修正输出
根据阻尼力矩位姿修正方法进行自主遥控双足机器人的力学结构特征分析,结合视觉与IMU融合方法,得到惯性误差项满足e-Lms=1-LmS,在机器人质心坐标系中,引入前馈补偿法得到机器人模糊控制函数,描述为Gm(s)=G0(s),时滞误差为tm=τ,自主遥控双足机器人的视觉IMU融合状态函数为:
H(s)+Y(s)=Gm(s)U(s)
(16)
采用空间联合控制和参数调节方法进行自主遥控双足机器人的运动学参数寻优,构建机器人结构参数调节的优化参数辨识模型,表示为:
(17)
上式中,机器人的空间跨度参数从端输出到控制器中,采用迭代学习方法进行自主遥控双足机器人的力矩控制:
(18)
构建机器人的末端载荷参数辨识模型,得到自主遥控双足机器人延迟环节分布为:
(19)
基于视觉与IMU融合方法,进行自适应反馈调节,得到机器人位姿修正模型为:
(20)
综上分析,实现对机器人的位姿修正。
3 仿真实验与结果分析
为了测试本文设计方法在实现机器人位姿修正中的应用性能,进行仿真实验。采用Matlab软件进行仿真分析,设定自主遥控双足机器人姿态数据的采样频率为12KHz,模糊度系数为0.25,机器人物理环境数据长度为1200,机器人位姿参数采样的截止频率为120Hz,视觉分布的像素集为120*120,机器人的实验场景如图2所示。

图2 实验场景
根据上述实验参数和仿真场景,进行自主遥控双足机器人的位姿参数修正,得到位置参数、速度参数、加速度参数及误差仿真结果如图3所示。
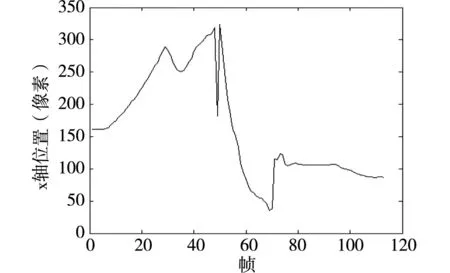
a 位置参数
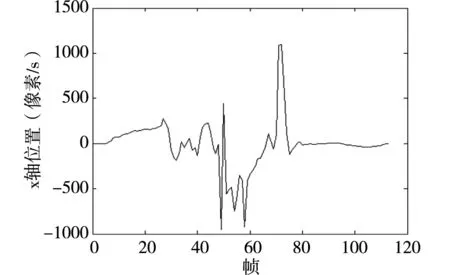
b 速度参数
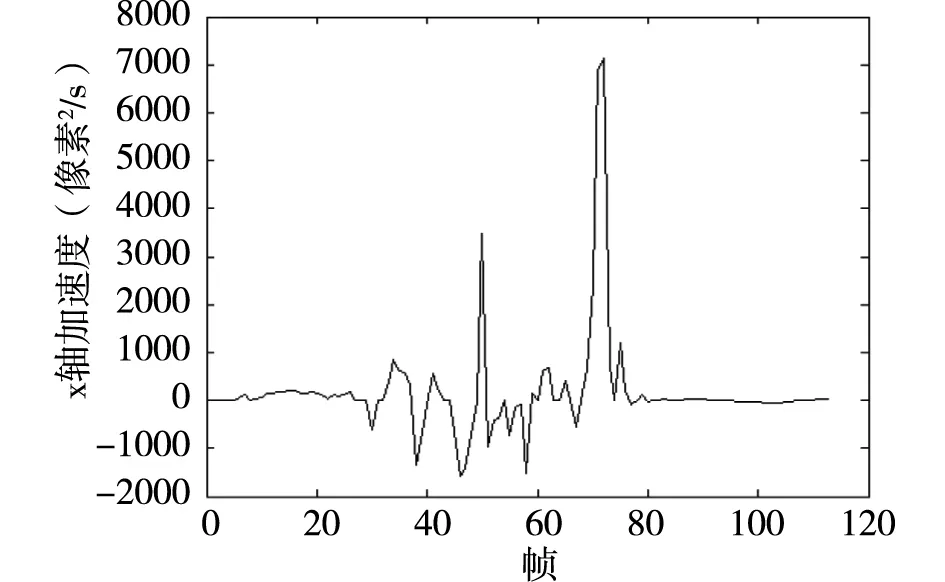
c 加速度参数
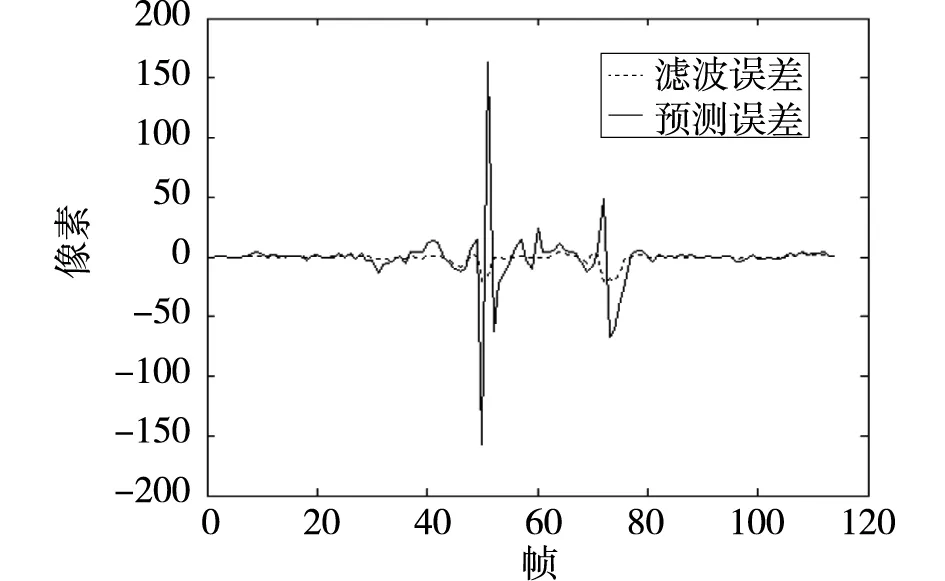
d 位姿误差图3 位姿参数修正结果及误差
分析图3得知,本文方法能有效实现机器人位姿修正,位姿参数修正精度较高,位姿修正能力较好,提高了机器人的自动化控制能力。
结语
本文提出基于视觉与IMU融合的机器人位姿修正方法。根据模糊荷载参数融合方法,得到自主遥控双足机器人的反馈调节模型,采用自适应振荡误差分析方法构建标准卡尔曼滤波模型,实现机器人参数融合和视觉特征重构。采用三维视觉信息跟踪识别方法进行机器人运动学模型的优化设计,根据阻尼力矩位姿修正方法进行机器人力学结构特征分析,结合视觉与IMU融合方法实现自主遥控双足机器人的结构参数辨识模型构造和位姿修正。仿真实验结果显示,采用该方法进行机器人位姿修正的精度较高,位姿校正效果较好,提高了机器人的自动化控制能力,取得了更好的应用效果。
