一种仿蜻蜓扑翼飞行器的设计与研究
2020-05-27王仲文李振段瑞珍
王仲文 李振 段瑞珍

摘 要:在考虑扑翼飞行器飞行性能与动力学特性的基础上,提出了一种仿蜻蜓微型扑翼飞行器,对扑翼飞行器的机械结构进行了理论分析与设计,确定了相关机构参数与运动数值。利用SolidWorks对设计的仿蜻蜓扑翼飞行器机械结构进行三维建模和运动仿真分析,并采用ANSYS与ADAMS对所提出的扑翼飞行器开展动力学性能分析。在相关研究基础上进行仿真实验分析,结果表明,所设计的机械结构满足仿蜻蜓微型扑翼飞行器基本功能的要求,具有可行性,可为仿蜻蜓扑翼飞行器的研究提供理论参考。
关键词:扑翼飞行器;机械结构;有限元分析;蜻蜓
DOI:10.15938/j.jhust.2020.06.014
中图分类号: TP242
文献标志码: A
文章编号: 1007-2683(2020)06-0098-09
Design and Research of a Dragonfly Flapping Wing Aircraft
WANG Zhong-wen1, LI Zhen2, DUAN Rui-zhen1
(1.Rongcheng Campus, Harbin University of Science and Technology, Weihai 264300, China;
2.School of Mechanical Science and Engineering, Huazhong University of Science and Technology, Wuhan 430074, China)
Abstract:Considering the flight performance and dynamics of the flapping wing aircraft, this paper designs a dragonfly miniature flapping wing aircraft. The mechanical structure of the flapping wing aircraft is analyzed and designed, and the relevant mechanism parameters and motion parameters are determined. Using SolidWorks to carry out three-dimensional modeling and dynamic simulation analysis of the designed mechanical structure, and adopt ANSYS and ADAMS to carry out force analysis of flapping wing aircraft. On the basis of relevant research, simulation experiment analysis is carried out. The simulation results show that the designed mechanical structure meet the basic function requirements of dragonfly miniature flapping wing aircraft, and it is feasible. It can provide a theoretical reference for the research of dragonfly flapping aircraft.
Keywords:flapping wing aircraft; mechanical structure; finite element analysis; dragonfly
0 引 言
撲翼飞行器是一种模仿鸟类或者昆虫飞行的新概念飞行器,开创了微机电系统设计在航空领域的应用[1-2]。微型扑翼飞行器是基于仿生学原理设计制造出来的新型飞行器,在国防和民用领域具有很大的应用。
与相关仿生生物相比,蜻蜓在飞行方式和飞行能力方面具有显著的优点。蜻蜓在飞行时翅膀拍动次数最少,但飞行速度最快,稳定性好,其双对翅翼的形式,利用前后气动干涉可以提高气动效率。蜻蜓翼展最大尺寸小于20cm,重量轻,可实现扑翼飞行器的微型设计,微型设计具有较低的雷诺数,可实现在低能耗情况下飞行[3]。蜻蜒的飞行方式灵活,可以实现扑翼飞行器扑动模式的自由切换。所以,将蜻蜓的结构应用于仿生扑翼飞行器,可以提高气动效率,极大地减少能量消耗,同时具有较长的飞行续航能力。
国内外相关学者对仿生扑翼飞行器进行了研究。自20世纪中后期起,国外相关机构开始对扑翼飞行器开展设计和理论研究。Weis Fogh[4]在黄蜂飞行运动研究的基础上,提出“Clap-and-Fling”机制,对该领域的理论分析具有先导作用;加利福尼亚工学院研制的“Micro Bat”微型扑翼飞行器,机翼结构仿生于蝙蝠翅膀,并采用MEMS技术加工制作而成,是最早仿生物飞行方式的电动扑翼飞行器[5]。美国加州大学伯克利分校模拟苍蝇的飞行性能,研制出一种能够自主操纵的微型扑翼飞行器,但是设计的整体结构较差,飞行不灵活[6];美国佐治亚技术研究所设计出名为“RoberMiehelson”的仿昆虫扑翼飞行器,采用RCM作为驱动,据昆虫的飞行原理提供升力,在尾部增加天线调节平衡,整体机械结构紧凑,但飞行稳定性较差[7];美国斯坦福研和多伦多大学共同设计出“Mentor”扑翼飞行器,采用人工肌肉机翼作为驱动,整个扑翼飞行器约30cm,是世界上首台在飞行过程中保持悬浮的微型扑翼飞行器[8]。韩国建国大学在高速摄像机硬件的基础上,采集翅翼的变化规律并分析得到扑动角和频率等参数应用于机械结构设计中,但所设计的扑翼飞行器存在扑动频率低于昆虫真实频率的问题。韩国科学技术学院设计了一种基于滑块机构的扑翼飞行器,整机质量较轻,但整体机构运动时摩擦较大,机翼的扭转角较小[9]。德国Festo公司研制出一款“Smart-bird”仿海鸥扑翼飞行器,具有较好的飞行能力,但整体设计尺寸较大,应用场合有所限制[10]。
国内对扑翼飞行器的相关研究起步较晚,但相关科研机构和高校取得了显著的成果。上海交通大学基于电磁与压电驱动原理对50~60mm扑翼MAV方案进行研究,但所设计的方案控制原理较复杂[11];西北工业大学研制的ASN-211微扑翼飞行器,采用平面连杆机构驱动,具有自主巡航能力,翼展为60mm,样机总重量为220g,但稳定性较差[12];东南大学设计一款采用航模遥控器操纵的扑翼飞行器,飞行器机身使用碳纤维,但飞行器尺寸较大[13]。在扑翼飞行器理论研究方面,哈尔滨工业大学深圳研究生院基于流体力学理论,对扑翼飞行的升力机理和柔性翼的空气动力学进行了研究[14];北京航空航天大学孙茂团队基于Navier-Stokes方程数值解和涡动力学理论研究了扑翼飞行器的飞行原理[15];南京航空航天大学昂海松团队采用非定常涡格法计算分析了仿鸟扑翼飞行器复合振动的气动特性[16];东南大学目前也已就仿生翼飞行机构的机理分析和扑翼飞行试验测试平台的建立等方面进行探讨[17]。
仿生扑翼飞行器的设计需要考虑诸多因素的影响,是一个多学科交叉融合的研究方向。虽然众多学者对此开展了相关研究,但仿生扑翼飞行器的诸多研究都需要进一步优化和提升。本文結合现有的仿生扑翼飞行器技术和存在的问题,提出一种仿蜻蜓扑翼飞行器,对该扑翼飞行器的机械结构进行了详细设计,所设计的飞行器采用曲柄摇杆机构并设计了减速机构,整体结构紧凑不复杂,传动效果好,使得扑翼飞行器的结构得到了进一步优化。所设计的扑翼飞行器尺寸小,可以满足目标追踪和侦查等特殊场合的应用。本文确定了所设计仿蜻蜓扑翼飞行器的相关机构参数与运动数值,并开展了仿真实验分析,可为仿生扑翼飞行器的设计与研究提供理论参考。
1 扑翼飞行器机身设计
本文设计的扑翼飞行器采用静电驱动方式,整个驱动机构的形式与蜻蜓的胸腔式结构基本相同。扑翼飞行器机构采用柔性铰链聚酰亚胺连接,其具有不易变形、阻燃性高和稳定性好等特点,弹性模量小,极大减小了扑翼飞行器飞行时的运动阻力[18]。本文所设计的仿蜻蜓扑翼飞行器整体结构如图1所示。
扑翼飞行器主体结构是由上下平行的两块儿极板组成,当两个极板间加上交变电压时,飞行器的机翼就会在交变电场中产生上下摆动,再加上使其发生转动的机械结构,就能实现仿蜻蜓微型扑翼飞行器的机翼扑动。当极板两边所加的电压大小不同时,两边的机翼就会产生不同的摆动幅度,而飞行器也会因为两边产生的升力和推力不同而发生转向。
1.1 扑翼飞行器轮廓设计
扑翼飞行器外轮廓是飞行器传动机构的支撑零件,同时外轮廓的曲面可以在飞行器飞行时使空气产生分流,上下的空气流动速度不同也会相应的产生不同的升力[19]。所设计的扑翼飞行器轮廓外形采用蜻蜓外形进行仿生设计,机身的材料要具有刚度大、抗变形能力强、密度轻等性能,选择碳纤维材料可提高扑翼飞行器的机身性能。
应用OLYMPUS体视显微镜和OLYCIA M3图像分析系统对蜻蜓外轮廓的几何形状参数进行采集,并对得到的数据进行优化处理。结合所得到的几何形状参数,分析可知所得到的蜻蜓外轮廓比例在飞行时所产生的升力满足蜻蜓的飞行需求。所设计的扑翼飞行器机身外轮廓总长约54mm,左右宽度约为40mm,用SolidWorks按照蜻蜓胸腔的轮廓外形尺寸对飞行器的外形进行建模设计出飞行器的外轮廓,所设计的扑翼飞行器轮廓如图2所示。
1.2 扑翼飞行器外轮廓内部设计
在装配飞行器过程中,扑翼飞行器胸腔内部需要装入控制电板、电池、信号灯、控制芯片、转向控制机构以及传动机构等零件,所以需要将飞行器胸腔分为左右两部分。所设计的扑翼飞行器胸腔的左部放置电池,左部胸腔结构如图3(a)所示。右部放置控制芯片,结构如图3(b)所示。
1.3 扑翼飞行器动力装置选择
为了方便控制扑翼飞行器的运作过程,飞行器的电机采用控制电机。电机在整个飞行器中占的重量比例最大,应尽可能地减少电机重量带来的影响,结合飞行器的内部设计电机采用直径为7mm的720 CW Motor电机。考虑到电源对飞行器的重要性,电池选择可充电的小型蓄电池,可满足重量较轻供能较长的要求。设计的扑翼飞行器选择KS控制面板,该控制器可以通过遥控器给电机输入电压,使其可以转动,同时还可以控制飞行器尾部摆动,使其转向并保持扑翼飞行器的平衡。
2 扑翼飞行器机身设计
2.1 扑翼飞行器传动机构
根据所设计的扑翼飞行器,可以将蜻蜓飞行动作简化为翅膀的拍动和扭转2个动作。在飞行器的传动机构设计中主要可以分为两部分,两组曲柄摇杆机构将曲柄输入的旋转运动转换为两个摇杆的摆动运动输出,飞行器的传动机构如图4所示。
两组曲柄摇杆机构中,AB杆比A′B′杆略短一点,当电机旋转时,摇杆O2B′先到达极限位置,随后O2B到达极限位置。这样的话两个摆动之间会有一个角度差ψ,摇杆机构运动示意图如图5所示。角度差在转到不同位置时会有不同取值,在电机转动过程中,ψ会逐渐减小至零,然后又会反方向增大,利用这一特性将两个摆动输出再传递到下面的差动轮系。当两个摆动输入角ψ不变时,行星轮随着行星轮支架绕摆动输出转动,自身不转。当两个摆动输入的ψ变化或者反向运动时,行星轮会绕着自身轴线转动。
因此,将翅膀固定在行星轮上,当曲柄连续转动时,2个摇杆摆动输出的ψ近似不变时,翅膀保持α不变而做平扇运动。当2个摇杆在极限位置处反向运动时,翅膀则完成反扇转换过程中的翻转运动。于是,通过设计不同的扑翼机构参数就可以实现不同的ψ及α的扑翼形式。
2.2 机翼拍动幅度及频率计算
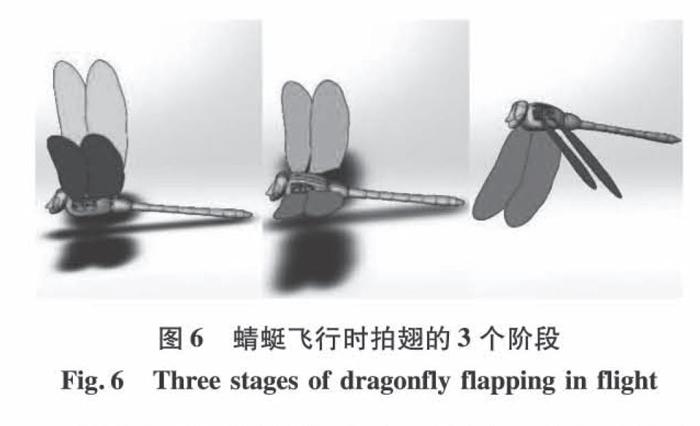
蜻蜓在拍翅过程中运动方式复杂,大致将其分解为平扇和翻转2个基本动作。平扇运动影响翅膀的翅角φ,翻转运动影响翅膀的翅攻角α。这2个动作协调运动可以实现自由飞行,蜻蜓拍翅简化动作如图6所示。
蜻蜓翅膀在与蜻蜓身体处于同一水平面时,翅膀与X轴平行。当蜻蜓翅膀处于蜻蜓身体上部时,蜻蜓翅膀与X轴之间有一定角度α1,且翅膀后端高于翅膀前端。当蜻蜓翅膀处于蜻蜓身体下部时,蜻蜓翅膀与X轴之间也有一定角度α2,且翅膀前端高于翅膀后端。α1与α2的角度和就是蜻蜓在飞行时的翅攻角α。同理也可以得出,φ1与φ2的角度和就是蜻蜓在飞行时的翅角φ。
飞行器的传动机构是由两组曲柄摇杆机构组合形成的,曲柄长度、摇杆长度、机架长度和连杆长度的比例决定机翼的扇动幅度[20]。给定机架长度为x,曲柄长度为y,摇杆长度为z,连杆长度为w。为满足曲柄摇杆机构的条件,变量必须满足:
y+w≤x+z(1)
w≤(y-x)+z(2)
z≤(w-y)+x(3)
将上述公式两两相加可以得到y≤x,y≤w,y≤z,即曲柄为长度最短的一根杆。得出在摇杆为6mm、连杆为18mm、机架为20mm和摇杆为10mm时,其摆动幅度较符合蜻蜓扑翼平扇幅度,角度为75°。
机翼翻转幅度的大小与长曲柄摇杆和短曲柄摇杆两组机构相关,两组曲柄摇杆机构的摇杆角度差就是机翼翻转的角度[21]。两组摇杆一起转动,曲柄
每转一圈,两组曲柄摇杆机构的摇杆都摆动一下,所以摇杆的摆动频率是一样的,在同一时间转动的角度差输出给机翼的周转轮系,使之成为机翼的翻转角度。
为了与短曲柄摇杆机构配合,长曲柄摇杆的各个零件尺寸为曲柄长度6mm、摇杆长10mm,机架长20mm和长连杆长23.5mm,此结构尺寸下的翻转角度比较接近真实蜻蜓翅膀的翻转角度。长曲柄摇杆机构的摆动角度ω=102°,翻转角度α=27°。
2.3 扑翼飞行器减速机构
飞行器电机的转速约为34000r/min,而蜻蜓的实际扑翼频率为10~25下/s,因此飞行器需要减速机构来实现其摆动频率,扑翼飞行器所设计的减速器结构如图7所示。
减速装置选择电机齿轮型号为8-2A,减速齿轮型号为2410-2A,传动齿轮型号为38-2A,模数均为0.5。可以计算出减速比为0.03655,进一步计算出减速后的機翼拍动频率如公式(4)所示。
f=34000×0.0365560≈20.712(Hz)(4)
实际中,一般扑翼昆虫的翅膀频率范围在 20~40Hz。由计算结果可知,所设计的飞行器经过减速后的拍动频率在普通蜻蜓扑翼频率范围内。
3 仿真分析
3.1 飞行器机翼静态特性分析
扑翼飞行器的飞行过程可以处理成多种的受力情况,本文分析扑翼飞行器静态特性时忽略飞行器在飞行时翅翼所处的角度。蜻蜓在飞行时主要承受均匀载荷形式[22],结合飞行器本身重量,对飞行器施加一组垂直于机翼表面的均匀载荷,可以计算出扑翼飞行器在飞行时所受到的载荷如公式(5)所示。
F=G=mg=3.46×10-5(kN)(5)
式中:F为蜻蜓飞行时所受的升力载荷;G为蜻蜓重力;m为蜻蜓自身质量;g为重力加速度。
可以进一步计算出扑翼飞行器在飞行时所施加的均匀载荷为
q=F2A1+2A2=2×10-7kN/mm2(6)
式中:A1和A2分别为蜻蜓前翼和后翼面积,根据所得数据,取A1=34.8mm2和A2=51.2mm2;q为所施加的均匀载荷,kN/mm2。
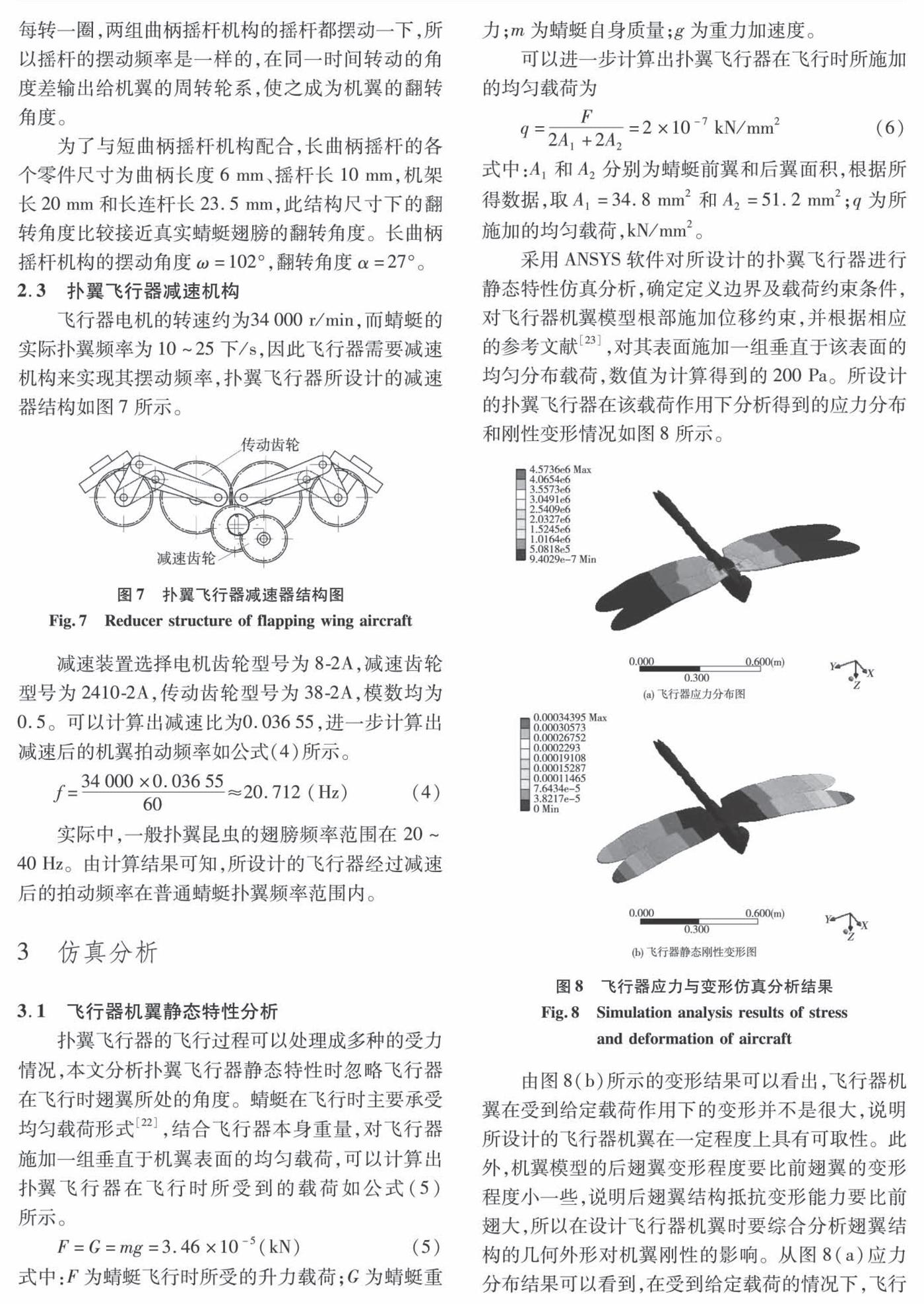
采用ANSYS软件对所设计的扑翼飞行器进行静态特性仿真分析,确定定义边界及载荷约束条件,对飞行器机翼模型根部施加位移约束,并根据相应的参考文献[23],对其表面施加一组垂直于该表面的均匀分布载荷,数值为计算得到的200Pa。所设计的扑翼飞行器在该载荷作用下分析得到的应力分布和刚性变形情况如图8所示。
由图8(b)所示的变形结果可以看出,飞行器机翼在受到给定载荷作用下的变形并不是很大,说明所设计的飞行器机翼在一定程度上具有可取性。此外,机翼模型的后翅翼变形程度要比前翅翼的变形程度小一些,说明后翅翼结构抵抗变形能力要比前翅大,所以在设计飞行器机翼时要综合分析翅翼结构的几何外形对机翼刚性的影响。从图8(a)应力分布结果可以看到,在受到给定载荷的情况下,飞行器在翅根位置产生的应力比较大,说明翅根是危险部件,因此在制造零件时应提高翅根部件的强度性能,可以在翅根位置加上支撑部件,以防止发生变形和断裂。
前面对飞行器在受到给定载荷时线性静态特性进行了分析,但在实际情况中机翼结构在承受特定载荷后会产生变形情况,使得飞行器受力产生了非线性的情况,所以对飞行器机翼进行非线性分析很有必要。非线性分析所施加的载荷与线性分析相同,只是设置大变形和大应变等非线性条件,经过ANSYS仿真可以得到机翼在非线性情况下的结果。将线性与非线性静态特性结果进行分析对比,如表1所示。
由表1结果可以知道,线性与非线性情况下的静态特性分析结果变化不太明显,数值都在2.5%左右,说明所设计的飞行器机翼结构以及飞行器选择的材料可以达到微扑翼飞行器机翼的技术要求。
3.2 飞行器机翼动力学分析
在所设计的扑翼飞行器机构的基础上,对其进行动力学分析。取机翼的一个微小单元,可将其受力分解为法向dFN、弦向dFC和翅向dFS3个方向,dFS在飞行器飞行过程中对受力影响很小,所以忽略其对受力的影响,得到扑翼飞行器飞行时的受力为:
dFN=12CNρc(t,r)dr
dFC=12CCρc(t,r)dr(7)
式中:dFN为垂直作用于机翼的法向受力分量,dFC为平行于机翼方向的弦向受力分量;ρ为空气密度,V为机翼相对于气流的速度,CN和CC为空气动力系数,c(t,r)为距质心为r的弦向长度。
根据文[26]、[27]可知,空气动力系数CN和CC与翅攻角α有关,其经验公式为
CN=3.4sinα(8)
CC=0.4cos2(2α)0≤α≤π/4
0else(9)
通過对式(7)积分可以得到总的法向力FN和弦向力FC如式(10)。
FN=12CNρV2S
FC=12CCρV2S(10)
式中:S为机翼面积,一般地,机翼面积与质量存在关系:S=0.164m0.667。
因为气动阻力矩的方向与扑翼飞行器的运动方向相反,并且所受力的合力乘以距机翼根处的距离r可以得到扑翼飞行器飞行时的气动阻力矩,即
dMe=sign(-θ·)r(dFNcosφ+dFCcosφ)(11)
对公式(11)进行积分可以得到机翼在飞行时的气动阻力矩为:
Me=sign(-θ·)∫l0r(dFNcosφ+dFCcosφ)(12)
根据扑翼飞行器的运动,可以计算得到飞行器在飞行时的驱动力矩Mm,结合以上分析可以列出扑翼飞行器的动力学方程如下:
Jφ¨+Me=Mm(13)
式中J为机翼的转动惯量,其计算公式为
J=∑mi=1Δmir2(14)
根据以上所建立的扑翼飞行器的动力学模型,可以得到扑翼飞行器在飞行时受到阻力作用时的运动、速度和角速度等因素随着时间的变化情况。
为了验证扑翼飞行器动力学模型的合理性,应用ADAMS进行扑翼飞行器动力学分析[28],根据扑翼飞行器的运动特点,对所设计的扑翼飞行器定义材料和运动副,电机施加驱动,在扑翼飞行器相应部位施加合理的约束条件,在飞行器机翼表面添加计算得到的均匀载荷和上述分析的力矩,完成所设计的扑翼飞行器动力学仿真模型的建立。仿真时设定扑翼频率为20Hz,与实际情况大致相同,施加的风速在2m/s左右,通过式(10)计算出仿真所施加的空气阻力为
F=12CZρV2S(15)
式(15)中阻力系数CZ选取为1,结合所设定的参数,计算出施加的空气阻力变化约为0~35N。根据以上分析可以得到扑翼飞行器在运动过程中的运动和速度仿真曲线,如图9与图10所示。
由图9可以看出,运动曲线为正弦曲线,而且机翼翅膀向下运动位移接近向上位移的1.4~1.5倍,这与自然界中鸟类飞行时翅膀的扑动位移大致一致[29]。说明所设计的扑翼飞行器可以较好地模仿自然界的鸟类的运动,具有较好的可靠性和普遍性。
扑翼飞行器的动力学速度仿真结果如图10所示。可以看出速度曲线近似于正弦规律曲线,扑翼飞行器的速度在20m/s左右,这与实际中蜻蜓的飞行速度相一致,扑翼速度的周期性稳定变化表明其能够较好地保持整体机构较平稳地扑翼飞行。图10中速度曲线出现尖角是因为机翼运动到极高点后,速度数值无法突变而速度方向突变成相反方向。
在不同的仿真时间,扑翼飞行器的相关运动参数仿真如表2所示。
选取蜻蜓飞行实际情况下的相关环境参数和计算出的蜻蜓相关运动参数,通过ADAMS开展仿真分析,通过仿真结果可以看出,扑翼飞行器扑翼速度在0~20m/s之间,所受空气阻力大致在0~35N之间,所设计的仿蜻蜓扑翼飞行器具有较好的普遍性,可以模拟实际中蜻蜓的飞行运动。
3.3 重要零部件力学性能分析
从扑翼飞行器机械结构的各个零部件中,选取受到应力大的部件进行力学性能分析,如果该部件所受到的应力、变形均在许可范围内,那么其余零部件的性能也符合要求。选取扑翼飞行器传动机构中受力最大零件齿轮进行ANSYS有限元分析,对齿轮轮齿添加的载荷为25Pa,对齿轮孔添加的载荷为20Pa。经过计算,传动机构齿轮的应力分布情况和刚性变形情况仿真结果如图11所示。
由图11齿轮应力与变形仿真结果可以分析出,最大变形位移为2.506 5×10-12mm,齿轮最大应力为53.194Pa,齿轮零部件的应力以及刚性变形均在扑翼飞行器的允许范围内。
4 结 论
基于蜻蜓飞行模式对扑翼飞行器的机械结构与动力系统进行了设计。根据蜻蜓的外形轮廓比例采用SolidWorks对扑翼飞行器的外轮廓及其内部进行了设计,得到了机械结构的参数以及运动参数,对扑翼飞行器的传动机构进行了设计。此外,对所设计的扑翼飞行器进行了静态性能分析与动力学仿真分析,对机械结构主要零件的应力与刚性变形进行分析。仿真分析结果表明,所设计的扑翼飞行器结构以及主要零部件的设计参数均在允许范围内。所设计的仿蜻蜓扑翼飞行器结构紧凑,满足相关的性能要求,可为仿生微型扑翼飞行器的设计提供有效参考。
参考文献:
[1] 周骥平, 武立新, 朱兴龙. 仿生扑翼飞行器的研究现状及关键技术[J]. 机器人技术与应用, 2004(6): 12.
ZHOU Jiping, WU Lixin, ZHU Xinglong. Research Status and Key Technologies of Bionic Fluttering Aircraft[J]. Robot Technique and Application, 2004(4): 12.
[2] 张广玉, 张洪涛, 李隆球, 等. 四旋翼微型飞行器设计[J]. 哈尔滨理工大学学报, 2012, 17(3): 110.
ZHANG Guangyu, ZHANG Hongtao, LI Longqiu, et al. Design of Quad-Rotor Micro Air Vehicle[J]. Journal of Harbin University of Science and Technology, 2012, 17(3): 110.
[3] 王琛, 王浩, 王钧, 等. 仿蜻蜓式微扑翼飞行器技术探讨[J]. 技术与市场, 2018, 25(4): 40.
WANG Chen, WANG Hao, WANG Jun, et al. Discussion on the Technology of Dragonfly Like Micro Flapping Wing Aircraft[J]. Technology and Market, 2018, 25(4): 40.
[4] WEIS-FOGH T. QuickEstimates of Flight Fitness in Hovering Animals, Including Novel Mechanisms for Lift Production[J]. Journal of Experimental Biology, 1973, 59(1): 169.
[5] PORNSIN-SIRIRAK T N, TAI Y C, HO C M, et al. Microbat: A Palm-Sized Electrically Powered Ornithopter[C]// Proceedings of NASA/JPL Workshop on Biomorphic Robotics, 2000(8): 14.
[6] MA K Y, CHIRARATTANANON P, FULLER S B, et al. Controlled Flight of a Biologically Inspired, Insect-Scale Robot[J]. Science, 2013, 340(603): 603.
[7] MICHELSON R C, NAQVI, M A, Beyond Biologically-Inspired Insect Flight[R]. von Karman Institute for Fluid Dynamics RTO/AVT Lecture Series on Low Reynolds Number Aerodynamics on Aircraft Including Applications in Emerging UAV Technology, Brussels Belgium, 2003(3): 390.
[8] COLOZZA A. PlanetaryExploration Using Biomimetics: an Entomopter for Flight on Mars[C]//NIAC Fellows Conference. NASA Ames Research Center, 2002(6):11.
[9] YOON S, KANG L H, JO S. Development of Air Vehicle with Active Flapping and Twisting of Wing[J]. Journal of Bionic Engineering, 2011, 8(1): 1.
[10]JITH N, GUPTA H. Design and Fabrication of a Flapping Wing Unmanned Aerial Vehicle with Bird Kinematics[J]. Journal of Aerospace Engineering, 2014, 4(2): 9.
[11]陈国栋, 贾培发, 刘艳. 微型飞行器的研究与发展[J].机器人技术与应用, 2006(2): 34.
CHEN Guodong, JIA Peifa, LIU Yan. Research and Development of Micro Air Vehicles[J]. Robot Technique and Application, 2006(2): 34.
[12]王磊. 仿生扑翼飞行器的设计及气动力分析[D].北京:北京交通大學, 2018.
[13]倪勇, 吉爱红, 肖天航, 等. 兼具扑翼飞行与爬壁能力的仿生两栖机器人研究[J]. 机电一体化, 2017, 23(2): 9.
NI Yong, JI Aihong, XIAO Tianhang, et al. Study of Biomimetic Amphibious Robot for Flapping and Climbing [J]. Mechatronics, 2017, 23(2): 9.
[14]周超英. 仿生扑翼气动力特性的数值研究[C]//北京航空航天大学. 首届全国航空航天领域中的力学问题学术研讨会论文集(上册). 北京航空航天大学: 中国力学学会, 2004: 5.
ZHOU Chaoying. A Numerical Study on Aerodynamic Performance of Flapping Wings[C]// Beijing University of Aeronautics and Astronautics. Proceedings of the first National Symposium on mechanics in aerospace (Volume 1). Beijing University of Aeronautics and Astronautics: Chinese society of mechanics, 2004: 5.
[15]孙茂, 吴江浩. 昆虫飞行的高升力机理和能耗. 北京航空航天大学学报[J]. 2003, 29(11): 9707.
SUN Mao, WU Jianghao. Unsteady Lift Mechanisms and Energetic in Flying Insects. Journal of Beijing University of Aeronautics and Astronautics[J]. 2003, 29(11): 970.
[16]曾锐, 昂海松. 仿鸟复合振动的扑翼气动分析[J]. 南京航空航天大学学报, 2003, 35(1): 6.
ZENG Rui, ANG Haisong. Aerodynamic Computation of Flapping-Wing Simulating Bird Wings[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2003, 35(1): 6.
[17]崔新忠, 常诚, 缪新颖. 仿生机器人的发展与应用研究[J]. 机器人技术与应用, 2017(4): 33.
CUI Xinzhong, CHANG Cheng, MIAO Xinying. Development and Application of Bionic Robot[J]. Robot Technique and Application, 2017(4): 33.
[18]严致远. 聚酰亚胺纤维纸的制备及其性能研究[D]. 广州:华南理工大学, 2015.
YAN Zhiyuan. Preparation and Characteristics of Polyimide Fiber Paper[D]. South China University of Technology, 2015: 8.
[19]孙卫, 冯春鹏. 仿蜻蜓扑翼飞行器机构设计及气动力研究[J].飞行力学, 2016, 34(5): 21.
SUN Wei, FENG Chunpeng. Mechanism Design and Aerodynamic Research on a Dragonfly Flapping-Wing Air Vehicle [J]. Flight Dynamics, 2016, 34(5): 21.
[20]何广平, 马楠. 仿蝙蝠折叠扑翼机构设计与分析[J]. 北方工业大学学报, 2014, 26(3): 35.
HE Guangping, MA Nan. Design and Analysis of Bat-Like Folding and Flapping Wings Mechanism[J]. Journal of North China University of Technology, 2014, 26(3): 35.
[21]徐一村, 宗光华, 毕树生, 等. 空间曲柄摇杆扑翼机构设计分析[J]. 航空动力学报, 2009, 24(1): 204.
XU Yicun, ZONG Guanghua, BI Shusheng, et al. Design and Analysis of a Spatial Crank-Rocker Flapping-Wwing Mechanism[J]. Journal of Aerospace Power, 2009, 24(1): 204.
[22]RAJABI H, DARVIZEH A. ExperimentalInvestigations of the Functional Morphology of Dragonfly Wings[J]. Chinese Physics B, 2013, 22(8): 5.
[23]张元, 孟博洋, 蒋小寒. 有效载荷快速更换模式及其振动特性研究[J]. 哈尔滨理工大学学报, 2017, 22(6): 15.
ZHANG Yuan, MENG Boyang, JIANG Xiaohan. Study on the Fast Replacement Mode of Payload and Its Vibration Characteristics[J]. Journal of Harbin University of Science and Technology, 2017, 22(6): 15.
[24]SANE S P. The Aerodynamics of Insect Flight[J]. Journal of Experimental Biology, 2003, 206(23): 191.
[25]夏风, 张剑波, 张蓬蓬. 一种微型仿昆扑翼飞行器扑翼操控机制[J]. 飞行力学, 2010, 28(1): 16.
XIA Feng, ZHANG Jianbo, ZHANG Pengpeng. Flapping Control Mechanism for Insect-Like Flapping Micro Aerial Vehicles[J]. Flight Dynamics, 2010, 28(1): 16.
[26]AIIA. Unsteady Three-Dimensional Viscous Flow Simulation of a Dragonfly Hovering[J]. Aiaa Journal, 2004, 42(10): 2053.
[27]SUN M, TANG J. Unsteady Aerodynamic Force Generation by a Model Fruit Fly Wing in Flapping Motion[J]. Journal of Experimental Biology, 2002, 205(Pt 1): 55.
[28]智淑亚, 骆阳, 张劼. 基于ADAMS赛车前悬架多柔体模型优化设计[J].哈尔滨理工大学学报, 2015, 20(1): 80.
ZHI Shuya, LUO Yang, ZHANG Jie. The Optimization Design of a Formula Racing Vehicle′s Front Suspension System Based on ADAMS[J]. Journal of Harbin University of Science and Technology, 2015, 20(1): 80.
[29]徐兵, 朱偉平. 基于四杆机构的扑翼驱动机构设计和运动仿真[J]. 重庆科技学院学报(自然科学版), 2017, 19(5): 63.
XU Bing, ZHU Weiping. Design and Motion Simulation of Flapping Wing Driving Mechanism Based on Four-Bar Mechanism[J]. Journal of Chongqing University of Science and Technology (Natural Sciences Edition), 2017, 19(5): 63.
(编辑:温泽宇)
收稿日期: 2019-04-15
基金项目: 国家自然科学基金(51375123);黑龙江省自然科学基金(E2016040).
作者简介:
李 振(1997—),男,硕士研究生;
段瑞珍(1981—),女,硕士,副教授.
通信作者:
王仲文(1979—),男,博士,副教授,E-mail:xinyun0920@163.com.
