表贴式永磁同步电机的超前角弱磁控制
2020-05-27吕德刚薛俊泉
吕德刚 薛俊泉
摘 要:以表贴式永磁同步电机(SPMSM)矢量控制为基础,研究并实现了超前角弱磁控制,扩大了调速范围。在此基础上,采用一阶限幅低通滤波器对传统弱磁超前角进行滤波,消除弱磁后电机抖振现象。将定子电压相量值作为输入量,经计算、滤波后,将d、q轴偏移角度作为输出量反馈到电流环,从而实现弱磁扩速。仿真和实验证明,超前角弱磁控制能够扩大电机的调速范围,运行平稳,达到了扩速目的。
关键词:表贴式永磁同步电机;超前角;弱磁控制
DOI:10.15938/j.jhust.2020.06.006
中图分类号: TM351
文献标志码: A
文章编号: 1007-2683(2020)06-0040-06
Flux Weakening Control of Leading Angle of Surface-mounted
Permanent Magnet Synchronous Motor
L De-gang, XUE Jun-quan
(Key Lab of National and Local United Engineering for Electric and Heat Transfer Technology of Large Electrical Machine, Harbin University of Science and Technology, Harbin 150080, China)
Abstract:Based on the vector control of the surface-mounted permanent magnet synchronous motor (SPMSM), the leading angle flux magnetic weakening control is realized and the speed adjustment range is expanded. On this basis, the first order limited-amplitude low pass filter is used to filter the traditional leading angle flux magnetic weakening control to eliminate the buffeting phenomenon of the motor. In this paper, the stator voltage phase value is taken as the input quantity. After calculation and filtering, the d and q axis migration angles are fed back to the current ring as the output quantity, so as to realize to expend the speed adjustment range. Simulation and experiment prove that the leading angle flux weakening control can expand the speed range of the motor and run smoothly, achieving the purpose of speed expansion.
Keywords:stick type permanent magnet synchronous motor (SPMSM); leading angle; flux weakening control
0 引 言
永磁同步电机(PMSM)具有电机结构简单,体积小,重量轻及高功率密度、高效率等特点,被广泛用于高精度,高动态性能和大范围调速的场合。
随着工业的发展,电机在诸如电动汽车、机床驱动、工厂室内运输车等场合应用时,期望在额定功率下转速尽量提高。
文[1-3]采用电流弱磁控制方法,但在弱磁区电机震动较大。文[4-6]提出在传统弱磁PI环节加入模糊控制,但实际工程中其程序编写十分复杂。文[7-10]采用传统超前角弱磁控制,但在实际应用有谐波产生,对电机稳定运行造成干扰。文[11-15]采用电压闭环控制弱磁,在实际应用中会产生响应滞后,使d轴反馈值不精确。文[16-18]分别采用滑模PI和自适应PI作为超前角PI环节,实际应用会依赖電机参数,设置参数较多,设计较为复杂。文[19-21]分别针对电流交叉耦合效应、弱磁区分段控制及传统硬件设计等方面对永磁同步电动机弱磁控制进行优化,稳定性较好,鲁棒性较强,但对电机参数过分依赖,实际工程中对不同电机推广使用难度较大。
由于逆变器直流母线电压和输出电流能力的限制,电机的定子电压和电流存在着极限值。本文结合了传统超前角弱磁控制和一阶限幅惯性滤波器,有效的实现了电机的弱磁扩速。并通过仿真实验验证了算法实用有效。
1 PMSM的d-q轴数学模型
在PMSM的数学建模中,通常采用经过Clark变换和Park同步旋转坐标系下的d-q数学模型,以便于控制器的设计。
定子电压方程为:
ud=Rid+ddtψd-ωeψq
uq=Riq+ddtψq-ωeψd(1)
式中:R为定子电阻;ψ为磁链;ωe为电角度速度。
定子磁链方程为:
ψd=Ldid+ψf
ψq=Lqiq(2)
式中ψf为永磁体磁链。
电磁转矩方程为:
Te=32pniq[id(Ld-Lq)+ψf](3)
式中:Te为电磁转矩;pn为电机极对数。
机械运动方程为:
JdΩdt=Te-TL-RΩΩ(4)
式中:J为电机的转动惯量;RΩ为阻力系数;TL为负载转矩。
2 超前角弱磁控制
2.1 弱磁扩速基本原理
考虑表贴式永磁同步电机的稳态运行,忽略绕组电阻的压降,电压向量的归一化方程如下:
v2sn=ω2rn{(1+Ldnirdsn)2+(Lqnirqsn)2}(p.u.)(5)
式中电压相量vsn定义为:
vsn=(vrdsn2+vrqsn)(p.u.)(6)
式中电流相量irdsn关系为:
idsn=(irsn2-irqsn)(p.u.)(7)
式中:vsn为电压标幺值;ωrn为转速标幺值;irdsn为d轴电流标幺值;irqsn为q轴电流标幺值;Ldn为d轴电感标幺值;Lqn为q轴电感标幺值。
由式(6)可知,在输入侧母线电压保持恒定的情况下,电压相量vsn和电流相量isn分别对应逆变器所能达到的最大值,故在弱磁运行过程中,可认为两个值为恒值。
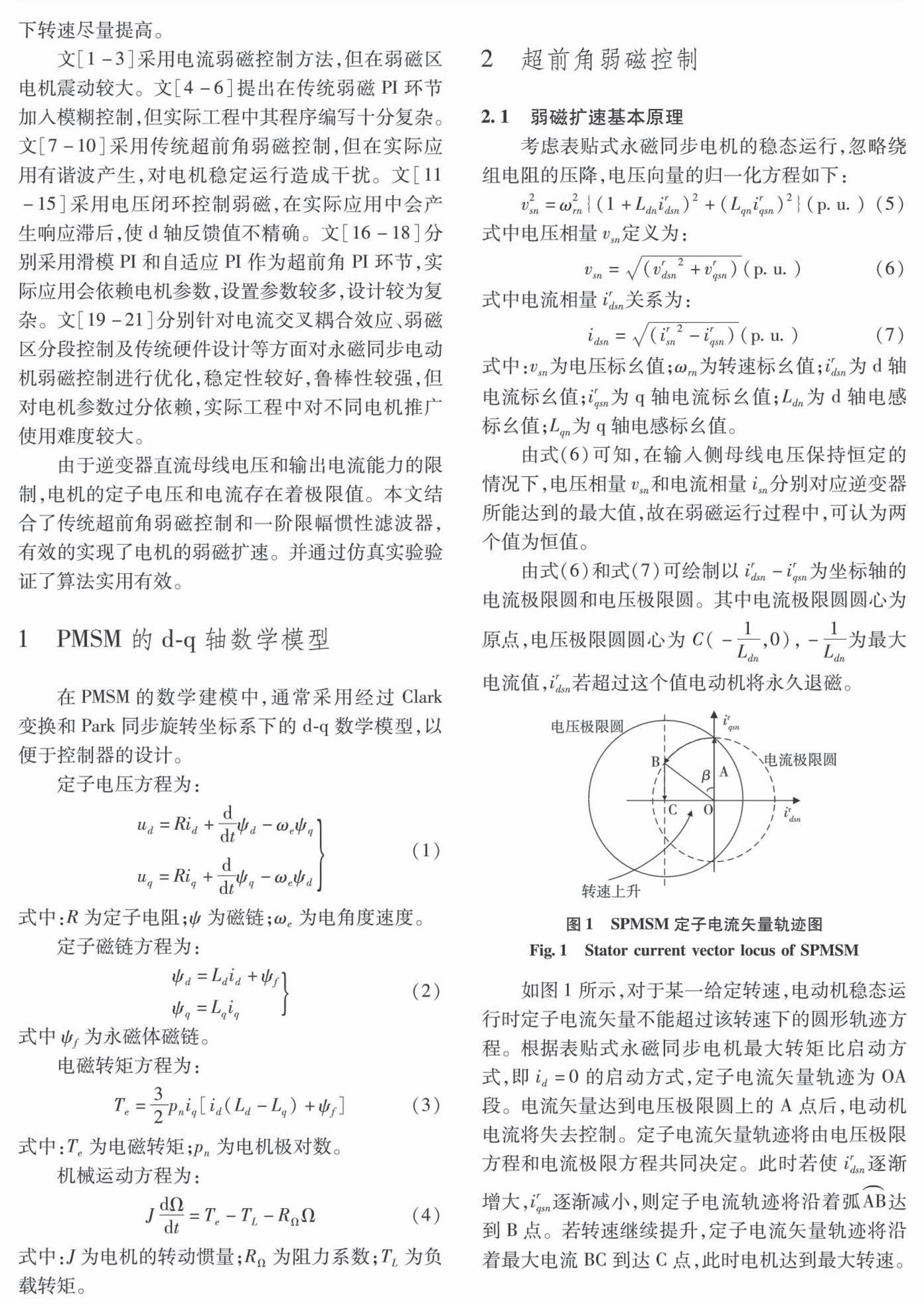
由式(6)和式(7)可绘制以irdsn-irqsn为坐标轴的电流极限圆和电压极限圆。其中电流极限圆圆心为原点,电压极限圆圆心为C(-1Ldn,0),-1Ldn为最大电流值,irdsn若超过这个值电动机将永久退磁。
如图1所示,对于某一给定转速,电动机稳态运行时定子电流矢量不能超过该转速下的圆形轨迹方程。根据表贴式永磁同步电机最大转矩比启动方式,即id=0的启动方式,定子电流矢量轨迹为OA段。电流矢量达到电压极限圆上的A点后,电动机电流将失去控制。定子电流矢量轨迹将由电压极限方程和电流极限方程共同决定。此时若使irdsn逐渐增大,irqsn逐渐减小,则定子电流轨迹将沿着弧AB达到B点。若转速继续提升,定子电流矢量轨迹将沿
着最大电流BC到达C点,此时电机达到最大转速。
2.2 超前角弱磁基本原理
根据PMSM的弱磁工作原理,在d-q坐标系下电流矢量达到最大转矩比电流极限值后,沿着电流极限圆逆时针方向转过一定角度,即电流超前角β。这样可以利用irdsn的去磁作用减小永磁体磁通量,保证电动机端电压不超过极限值,防止电流环PI调节器饱和,提高转速,这就是PMSM弱磁过程。在这一过程中,对irdsn和irqsn的控制就是超前角弱磁控制。
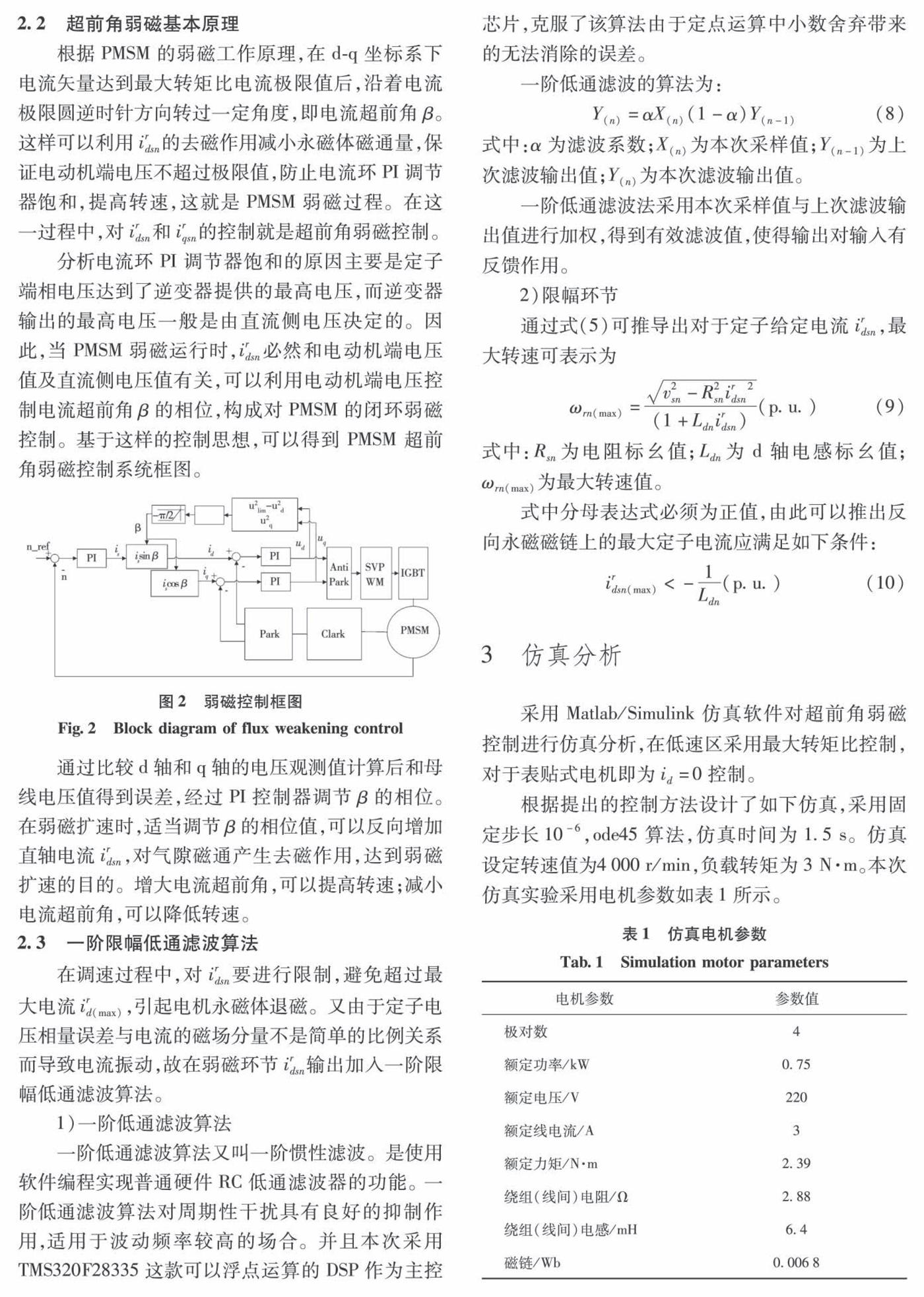
分析電流环 PI 调节器饱和的原因主要是定子端相电压达到了逆变器提供的最高电压,而逆变器输出的最高电压一般是由直流侧电压决定的。因此,当 PMSM弱磁运行时,irdsn必然和电动机端电压值及直流侧电压值有关,可以利用电动机端电压控制电流超前角β的相位,构成对PMSM的闭环弱磁控制。基于这样的控制思想,可以得到 PMSM 超前角弱磁控制系统框图。
通过比较d轴和q轴的电压观测值计算后和母线电压值得到误差,经过PI控制器调节β的相位。在弱磁扩速时,适当调节β的相位值,可以反向增加直轴电流irdsn,对气隙磁通产生去磁作用,达到弱磁扩速的目的。增大电流超前角,可以提高转速;减小电流超前角,可以降低转速。
2.3 一阶限幅低通滤波算法
在调速过程中,对irdsn要进行限制,避免超过最大电流ird(max),引起电机永磁体退磁。又由于定子电压相量误差与电流的磁场分量不是简单的比例关系而导致电流振动,故在弱磁环节irdsn输出加入一阶限幅低通滤波算法。
1)一阶低通滤波算法
一阶低通滤波算法又叫一阶惯性滤波。是使用软件编程实现普通硬件RC低通滤波器的功能。 一阶低通滤波算法对周期性干扰具有良好的抑制作用,适用于波动频率较高的场合。并且本次采用TMS320F28335这款可以浮点运算的DSP作为主控芯片,克服了该算法由于定点运算中小数舍弃带来的无法消除的误差。
一阶低通滤波的算法为:
Y(n)=αX(n)(1-α)Y(n-1)(8)
式中:α为滤波系数;X(n)为本次采样值;Y(n-1)为上次滤波输出值;Y(n)为本次滤波输出值。
一阶低通滤波法采用本次采样值与上次滤波输出值进行加权,得到有效滤波值,使得输出对输入有反馈作用。
2)限幅环节
通过式(5)可推导出对于定子给定电流irdsn,最大转速可表示为
ωrn(max)=v2sn-R2snirdsn2(1+Ldnirdsn)(p.u.)(9)
式中:Rsn为电阻标幺值;Ldn为d轴电感标幺值;ωrn(max)为最大转速值。
式中分母表达式必须为正值,由此可以推出反向永磁磁链上的最大定子电流应满足如下条件:
irdsn(max)<-1Ldn(p.u.)(10)
3 仿真分析
采用Matlab/Simulink仿真软件对超前角弱磁控制进行仿真分析,在低速区采用最大转矩比控制,对于表贴式电机即为id=0控制。
根据提出的控制方法设计了如下仿真,采用固定步长10-6,ode45算法,仿真时间为1.5s。仿真设定转速值为4000r/min,负载转矩为3N·m。本次仿真实验采用电机参数如表1所示。
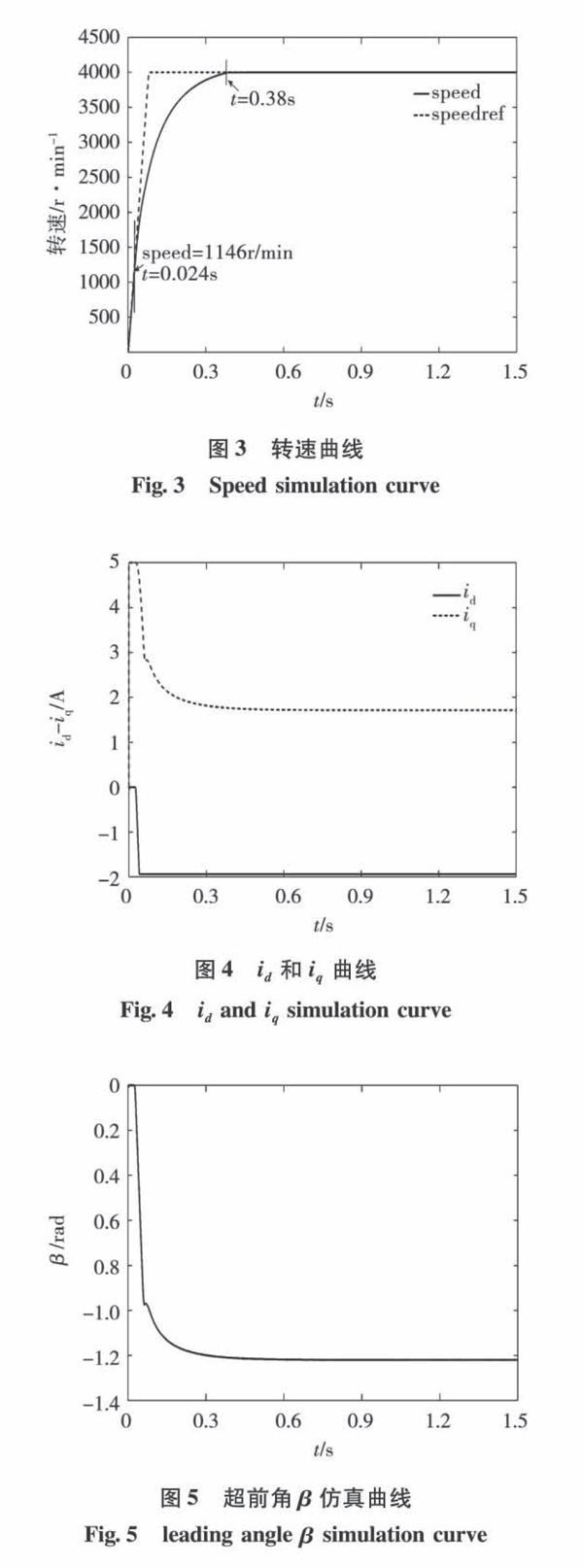
仿真结果如图3~6所示。
通过仿真结果图3可以看出,电机经过0.024秒达到基速。在0.024秒后电机进入弱磁区域,在0.038秒达到最高转速,过渡几乎无抖动,且几乎无超调量,动态响应较好。
从图4和图5可知,电机进入弱磁区域后,超前角β逐步增大,d轴电流反向增大,到达最大电流-1.95A后停止增加。为满足电流限制条件,q轴电流逐渐减小,当转速稳定时,超前角β约等于-1.23rad。图6中定子电流矢量轨迹也符合上文图1的理论分析。
4 实验及分析
根据上述理论和仿真分析,为更好地验证超前角弱磁在电机控制中的实用性和可靠性,搭建了表贴式永磁同步电机的实验平台。平台装置包括以TI公司的TMS320F28335为核心的控制电路、驱动电路、上位机、磁粉制动器以及转速转矩传感器。
上位机端设定转速基准值为3000r/min,电流基准值为3A。通过测试,电机在常规FOC控制中母线电压为86.6V时,转矩为1.8N·m,電机最大转速为0.33(p.u.)。实验采用SVPWM调制,弱磁电压限制裕度设定为90%,电压限定值为44.97V,在转速达到0.33稳定后开始计时。实验结果如图8~9所示。
图8是由上位机采集的速度值离散点拟合的转速曲线,电机三次经过弱磁从0.28~0.32(p.u.)升到0.42(p.u.),超调量较小,动态响应较好,电机在最高转速可以稳定运行,电机转速几乎无抖动。从图9中可以看出,弱磁后d轴电流有明显的下降,q轴电流经过小幅上升后,由于电流圆限制又下降直至稳定。
5 结 论
对表贴式永磁同步电机超前角弱磁控制进行仿真实验,采用一阶限幅惯性环节对超前角β进行校正。经仿真和实验证明本方法操作简单,实用性和可靠性较强,可以有效地对表贴式永磁同步电机进行弱磁扩速。
参考文献:
[1] 曹玉, 迟颂. 用于永磁同步电机单电流弱磁控制的积分型滑模控制器[J]. 机车电传动, 2018(1): 39.
CAO Yu, CHI Song. Integral Sliding Mode Controller for PMSM Single Current Flux-Weakening Control[J]. Electric Drive for Locomotives, 2018(1): 39.
[2] HIJIKATA H, AKATSU K, MIYAMA Y, et al. Suppression Control Method for Iron Loss of MATRIX Motor under Flux Weakening Utilizing Individual Winding Current Control[C]// Power Electronics Conference. IEEE, 2014:2673.
[3] 王慧敏, 张雪锋, 李新旻, 等. 基于改进型模糊控制器的内置式永磁同步电机全速域控制[J]. 新型工业化, 2018(1): 30.
WANG Huimin, ZHANG Xuefeng, LI Xinmin, et al. Full Speed Range Control of IPMSM Based on Improved Fuzzy Logic Controller[J] New Industrialization Straregy, 2018(1): 30.
[4] 贾雨庆, 江泽, 米乾宝. 一种PMSM弱磁系统模糊-PI复合控制方法[J].微电机, 2018, 51(2): 61.
JIA Yuqing, JIANG Ze, MI Qianbao, A Fuzzy-PI Hybrid Control Method for PMSM Field-weakening Control System[J]. Micromotors, 2018, 51(2): 61.
[5] 朱正佳, 李优新, 任崇明, 等. 基于模糊控制的内置式永磁同步电机弱磁调速算法[J].微电机, 2017, 50(7): 40.
ZHU Zhengjia, LI Youxin, REN Chongming, et al. A Speed Regulating Algorithm of Flux-weakening for IPMSM Based on Fuzzy Control[J]. Micromotors, 2017, 50(7): 40.
[6] 刘雨石, 乔鸣忠, 朱鹏. 基于SVPWM过调制的超前角弱磁控制永磁同步电机的策略研究[J].电机与控制应用, 2018, 45(2): 28.
LIU Yushi, QIAO Mingzhong, ZHU Peng. Research on Over-Angle Weakening Control Strategy Based on SVPWM Overmodulation[J]. Electric Machines & Control Application, 2018, 45(2): 28.
[7] 韩顺利. 永磁同步电机矢量控制系统弱磁控制研究[D].北京:中国矿业大学, 2017.
[8] 谢涛, 高桂革, 曾宪文, 等. 车用永磁同步电机弱磁控制策略分析[J]. 电源世界, 2017(7): 24.
XIE Tao, GAO Guige, ZENG Xianwen, et al. Improvement of Weak Magnetic Control Strategy for Permanent Magnet Synchronous Motor[J]. The World of Power Supply, 2017(7): 24.
[9] 王杰, 谢源, 谢涛. 基于电压闭环反馈的永磁同步电机弱磁调速研究[J].电机与控制应用, 2018, 45(4): 27.
WANG Jie, XIE Yuan, XIE Tao. Research on Flux Weakening Control of Permananet Magent Synchronous Motor Based on Voltage Closed-Loop Feedback[J]. Electric Machines & Control Application, 2018, 45(4): 27.
[10]刘光辉, 何凤有, 吴翔, 等. 内置式永磁同步电机滑模弱磁控制[J].电力电子技术, 2018, 52(3): 82.
LIU Guanghui, HE Fengyou, WU Xiang, et al. Flux Weakening Control of Interior Permanent Magnet Synchronous Motor Based on Slide Mode Controller[J]. Power Electronics, 2018, 52(3): 82.
[11]谢涛, 高桂革, 曾宪文, 等.基于自适应速度控制器的SPMSM弱磁调速研究[J].电源世界, 2017(9): 21.
XIE Tao, GAO Guige, ZENG Xianwen, et al. Researchon Flux Weakening Control of SPMSM Based on Adaptive Speed Controller[J]. The World of PowerSupply, 2017(9): 21.
[12]AMIYA Naik, ANUP Kumar Panda, SANJEEB Kumar Kar.Improving the Dynamic Response during Field Weakening Control of IPMSM Drive System Using Adaptive Hysteresis Current Control Technique[J]. International Journal of Emerging Electric Power Systems, 2016, 17(3): 235.
[13]FANG Xiaochun, LIN Fei, YANG Zhongping. A Modified Flux-weakening Control Method of PMSM Based on the d-q Current Cross-coupling Effect[C]// Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), 2014 IEEE Conference and Expo, 2014:1.
[14]年珩, 胡偉, 周义杰. 共直流母线开绕组永磁同步电机的弱磁控制策略[J].中国电机工程学报, 2018, 38(21): 6461.
NIAN Heng, HU Wei, ZHOU Yijie. Field-weakening Control Strategy of Open-winding Permanent Magnet Synchronous Motor with Common DC Bus[J]. Proceedings of the CSEE, 2018, 38(21): 6461.
[15]闫娜云, 宗剑. 内置式永磁同步电动机弱磁调速优化控制[J].电机与控制应用, 2018, 45(10): 24.
YAN Nayun, ZHONG Jian. Optimized Flux-Weakening Speed Control of Interior Permanent Magnet Synchronous Motor[J]. Electric Machines & Control Application, 2018, 45(10): 24.
[16]TANG Guomei. Research on Weakening Control of Asynchronous Motor with Load Based on Vector Control[C]// Advanced Science and Industry Research Center. Proceedings of 2018 2nd International Conference on Electrical Engineering and Automation (ICEEA2018). Advanced Science and Industry Research Center: Science and Engineering Research Center, 2018: 111.
[17]LI Lin, LI Yongkuang, ZHAO Haiyan, et al. Flux-Weakening Control Research for Interior Permanent Magnet Synchronous Motor in Electric Vehicle[C]// Proceedings of the 2016 6th International Conference on Advanced Design and Manufacturing Engineering (ICADME 2017), 2017:466.
[18]杨公德, 林明耀, 李念, 等. 混合永磁轴向磁场磁通切换记忆电机分段弱磁控制[J].中国电机工程学报, 2017(22): 116.
YANG Gongde, LIN Mingyao, LI Nian, et al. Flux-weakening Stage Control of Hybrid Permanent Magnet Axial Field Flux-switching Memory Machines[J]. Proceedings of the CSEE, 2017(22): 116.
[19]陈宇峥. 永磁同步电机弱磁控制策略研究[D].杭州:浙江大学, 2018.
[20]Nisha G.K., Lakaparampil Z.V., Ushakumari S.. Torque Capability Improvement of Sensorless FOC Induction Machine in Field Weakening for Propulsion Purposes[J]. Journal of Electrical Systems and Information Technology, 2016: S2314717216300824.
[21]张国柱, 徐殿国, 朱良红, 等. 高功率因数无电解电容电机驱动系统电流控制策略[J].电机与控制学报, 2018, 22(1): 100.
ZHANG Guozhu, XU Dianguo, ZHU Lianghong, et al. Current Control Strategy of High Power Factor Electrolytic Capacitor-less Motor Drive[J]. Electric Machines and Control, 2018, 22(1): 100.
(编辑:温泽宇)
收稿日期: 2018-11-15
基金项目: 国家自然科学基金(51107023).
作者简介:
薛俊泉(1996—),男,硕士研究生.
通信作者:
吕德刚(1976—),男,博士,硕士研究生导师,E-mail:lvdegang619@126.com.
