基于实车测试的AEB系统测试评价方法研究
2020-05-25季中豪周景岩杨天栋张慧杨路鹏
季中豪 周景岩 杨天栋 张慧 杨路鹏
(中国汽车技术研究中心有限公司汽车工程研究院,天津 300300)
主题词:主动安全 自动紧急制动 测试评价方法 实车测试
1 前言
为有效减少交通事故发生的概率及其造成的人身伤害及经济损失,汽车主动安全技术得到了汽车行业的广泛关注,自动紧急制动(Automatic Emergency Braking,AEB)系统就是其中发展较为成熟且应用广泛的安全系统。
行业内各机构不断完善升级AEB 系统的同时,制定了各类测试评价方法。2012 年以来,欧盟新车安全评鉴协会(European New Car Assessment Programme,Euro-NCAP)、美国国家公路交通安全管理局(National Highway Traffic Safety Administration,NHTSA)、日本新车安全评鉴协会(Japan New Car Assessment Program,J-NCAP)等汽车测评机构根据本国交通环境的实际状况,相继发布了各自的AEB系统测试评价规程,并将其纳入新车主动安全评价体系。2017 年,中国汽车技术研究中心将AEB 系统纳入2018 年版中国新车评价规程(China New Car Assessment Program,C-NCAP)中,并根据中国的实际道路情况,制定了相应的测试和评价方法[1]。
根据AEB系统的技术发展和实际交通事故场景的需要,各试验规程的测试评价内容也在逐年丰富。目前国内已有的AEB 测试评价方法仍然存在测试场景缺乏、评价参数单一的问题,例如测试场景缺少夜间测试、目标物难以覆盖实际交通情况、仅通过避撞表现来评价系统等。
本文结合实车AEB 系统的测试结果,从测试场景和评价方法角度出发,研究各测试场景和多种评价参数对AEB 系统测试评价的合理性与必要性,并给出相应的建议。
2 AEB系统及其测试评价方法
AEB 系统主要包括AEB 和前向碰撞预警(Forward Collision Warning,FCW)两项功能。系统通过毫米波雷达、激光雷达、摄像头等传感器来探测前方目标信息(如相对车速、距离等),并实时计算与目标的碰撞危险程度。在出现碰撞危险时,系统会通过声音、图像等方式向驾驶员发出碰撞预警,在碰撞危险达到制动临界点时,系统会采取紧急制动避免碰撞[2]。
奔驰汽车公司和美国Eaton 公司发布的研究结果显示,如果驾驶员提前0.5 s对碰撞危险情况作出响应,就可避免60%的追尾事故发生,而在追尾事故中,驾驶员已经采取制动但制动力不足的情况约占49%[3-4]。AEB 系统可以很好地起到提前预警和提供充足制动力的作用,在很大程度上避免追尾事故的发生、降低碰撞的损害。
随着AEB系统的普及和相关技术的不断发展,AEB系统的测试评价方法也在不断更新。以Euro-NCAP 为例,相较2019 年版的测试规程,2020 年版Euro-NCAP即将新增十字路口工况、近端有障碍物的骑车人工况、后向自动紧急制动工况等AEB系统的测试内容。测试场景更加丰富,评价方法更加合理是AEB 系统测试的趋势。
目前,AEB系统的主要测试场景包含车对车和车对行人两类,即车辆追尾自动紧急制动系统(AEB CCR)试验和行人自动紧急制动系统(AEB VRU_Ped)试验,分别模拟了车辆间不同类型的碰撞追尾事故场景和车辆与弱势道路使用者(如行人、骑车人等)之间的碰撞事故场景。AEB 系统的评价方法则是根据车辆是否完成避撞或碰撞时的速度,结合不同测试场景的重要程度,对AEB系统进行整体评分。
3 国内外测试评价规程
3.1 2018年版C-NCAP AEB系统测试规程
《C-NCAP 管理规则(2018年版)》中AEB CCR 试验包括前车静止(Car to Car Stationary,CCRs)、前车慢行(Car to Car Moving,CCRm)、前车制动(Car to Car Braking,CCRb)3 种测试场景,每种场景对AEB 系统的AEB和FCW 功能进行测试。此外,为防止AEB 系统出现误作用影响驾驶员的正常驾驶,还需进行相邻车道车辆制动测试和铁板测试。详细测试矩阵如表1所示。
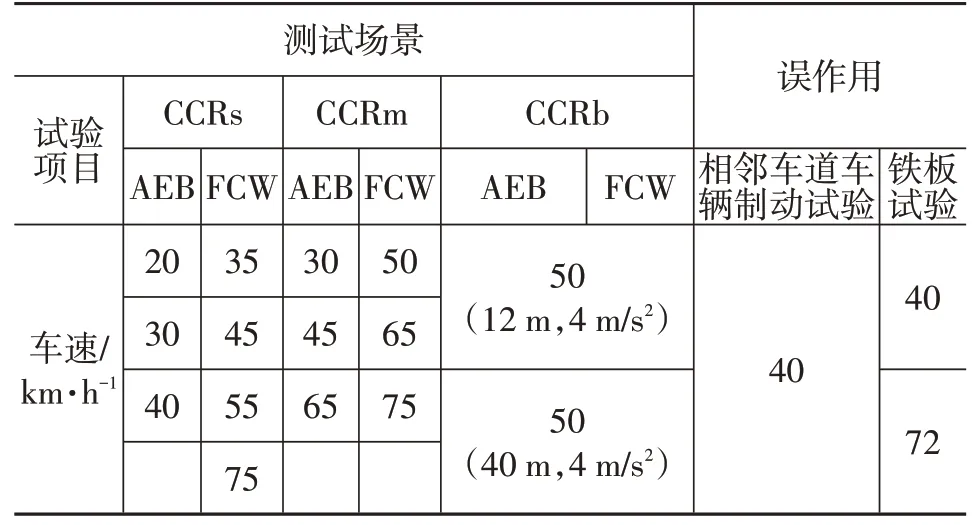
表1 AEB CCR测试矩阵
AEB VRU_Ped测试模拟车辆与横穿道路的行人发生碰撞的场景,主要包括行人从远端和近端穿行两种场景,即车辆碰撞远端成年行人(Car-to-VRU Far side Adult,CVFA)和车辆碰撞近端成年行人(Car-to-VRU Near side Adult,CVNA),发生碰撞的位置点有车前端25%、50%、75%共3种。详细测试矩阵如表2所示。
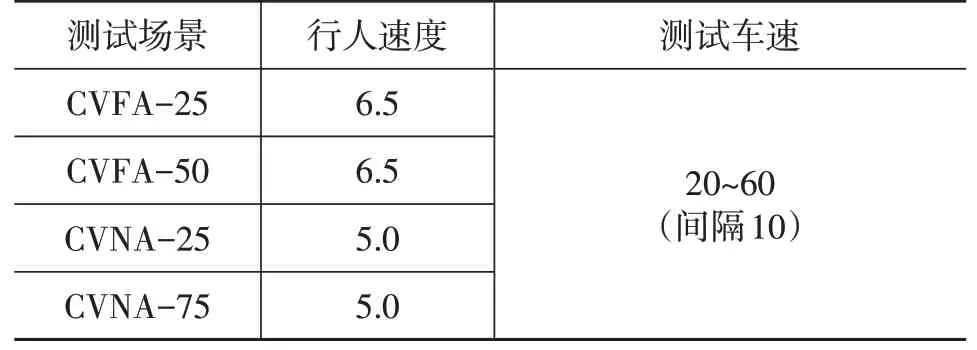
表2 AEB VRU_Ped测试矩阵 km/h
3.2 C-NCAP与Euro-NCAP测试规程比较
对比两种测试规程,测试场景主要有以下几种区别:Euro-NCAP 的AEB CCR 测试设置了车辆偏置作为变量(-50%、-75%、100%、75%、50%);Euro-NCAP 的AEB VRU 测试设置有部分夜间测试场景;Euro-NCAP的试验目标除成年目标外还包括儿童和骑车人等目标。
此外,两测试规程在各场景测试车速的范围及其梯度、发生碰撞后的试验方法等方面也存在区别。
而Euro-NCAP 和C-NCAP 的评价规程均采用车辆的避撞表现作为系统性能的评价参数。但Euro-NCAP评分的测试场景更多,车辆偏置、夜间测试等场景在评分中也占有很大的比重。
4 测试方法的研究
随着AEB 系统的不断开发升级,装配AEB 系统的车辆逐渐增多,如何全面、科学、有效地对AEB 系统进行评价是测试工作开展的关键。对比2018 年版C-NCAP 和2019 年版Euro-NCAP 测试规程,本文从碰撞点偏置测试、夜间测试、儿童和骑车人目标测试、弯道测试4 个测试场景的角度,结合实车测试的数据,分析上述场景变量对AEB系统表现的影响。
AEB 系统实车测试选择某款传统动力SUV(车辆A)和某款新能源电动汽车(车辆B)进行,两车AEB 系统传感器类型均为单目摄像头型,摄像头视场角为38°,安装于车辆前风窗玻璃顶部中央位置,可支持车、成人、儿童、骑车人等目标的识别。两车的AEB 系统均包括FCW 功能和AEB 功能,并都采用制动后直接达到所需最大减速度的制动策略。
分别对两车进行碰撞点偏置测试、夜间测试、儿童、自行车目标测试和弯道测试,每组至少采集2组有效数据(AEB 系统正常触发),并将每组试验结果按AEB 系统功能触发的时间分为试验组1、2(触发较早的为试验组1,较晚的为试验组2),从AEB 功能表现、FCW 功能表现、漏识别等方面比较试验结果。
4.1 碰撞点偏置测试
在AEB CCR 测试中,通过将测试车辆的行进轨迹向左或右偏置一定距离,可以进行不同碰撞点的测试,测试场景如图1所示。

图1 碰撞点偏置测试示意
本文设置了CCRs场景来研究不同偏置的碰撞点对AEB 系统表现的影响。在不同测试速度下,进行左、右偏置50%和正对的试验。如果试验中车辆的AEB 系统未触发,即FCW 功能未发出警示且AEB 功能未采取制动,则视为该次试验中系统对目标出现漏识别。本文对车辆A 或车辆B 在各场景中出现漏识别的试验次数进行统计,并计算出漏识别情况占对应场景的总试验次数的比例作为漏识别率。
两车AEB 功能的表现如图2 所示。车辆A 在部分偏置场景中功能触发时机较晚,但整体试验结果显示两场景下的功能几乎同时触发。车辆B 在正对场景中功能触发时机比偏置场景早。
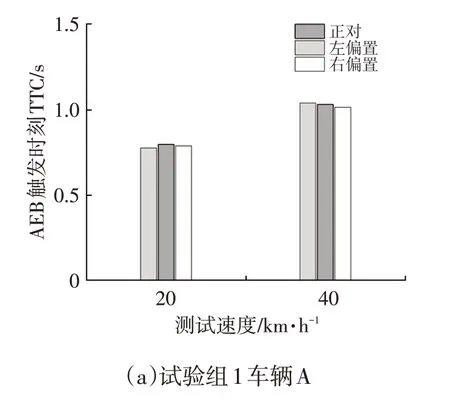

图2 车辆A、B自动紧急制动功能碰撞点偏置测试结果
两车FCW 功能的表现如图3 所示。试验中FCW功能设置为中灵敏度,测试车速分别为40 km/h 和70 km/h。试验结果表明,两车在正对场景中FCW 功能的触发时机较早,即FCW 功能在碰撞点有一定偏置的场景下,较正对场景更晚发出警示。
此外,车辆A 在偏置的场景中,AEB 系统存在漏识别的情况,漏识别率为20%。
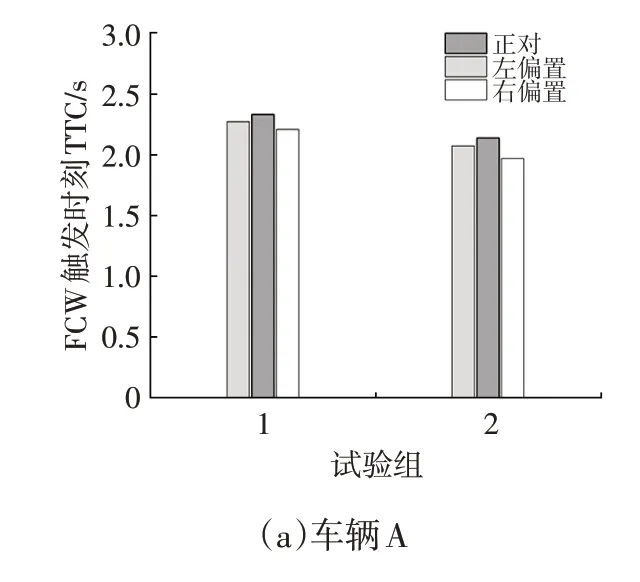
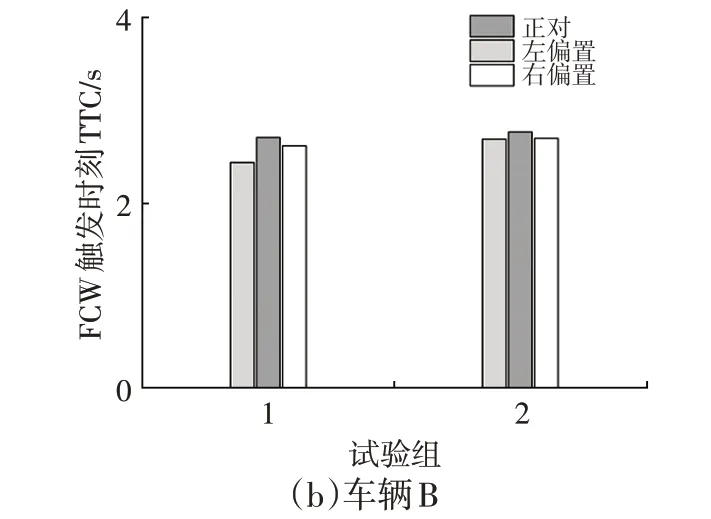
图3 车辆A、B前向碰撞预警功能撞点偏置测试结果
综上所述,相较正对场景,偏置场景下车辆A 的FCW功能报警较晚,且系统存在漏识别情况;偏置场景下车辆B的AEB功能触发和FCW功能报警均较晚。
因此,设置碰撞点偏置的测试场景,可以更好地检验AEB系统的性能表现和目标识别能力。
为避免相邻车道误作用的情况发生,AEB系统对偏置目标的识别和碰撞危险计算通常设有“门限值”,即当目标横向偏置超过一定距离,系统会抑制功能触发。因此设计场景时,碰撞点的横向偏置距离应在AEB 系统对偏置目标识别的“门限值”范围内。
4.2 夜间测试
夜间测试是在对光照条件有一定要求的夜间路段,车辆开启近光灯或远光灯时进行的测试。夜间场景的能见度和光线条件比白天差,因此摄像头类型的传感器的目标识别能力会受到一定影响。
本文设置了白天和夜间的对比试验,夜间测试路段的光源为两侧对称型,光照强度在8~22 lx 范围内。车辆A 进行CCRs 试验,车辆B 进行前方自行车追尾场景(Car-to-Pedestrian Longitudinal Adult,CPLA)试验。
车辆A AEB 功能的表现如图4 所示。白天场景中的AEB功能触发时机和开始制动距离较夜间场景更早。
车辆A FCW功能的表现如图5所示。测试中FCW功能的灵敏度设置为高、低两挡。与AEB 功能的表现类似,夜间场景下FCW功能的报警时刻普遍较晚,且在测试车速40 km/h、灵敏度低时,与白天场景表现有很大差异。
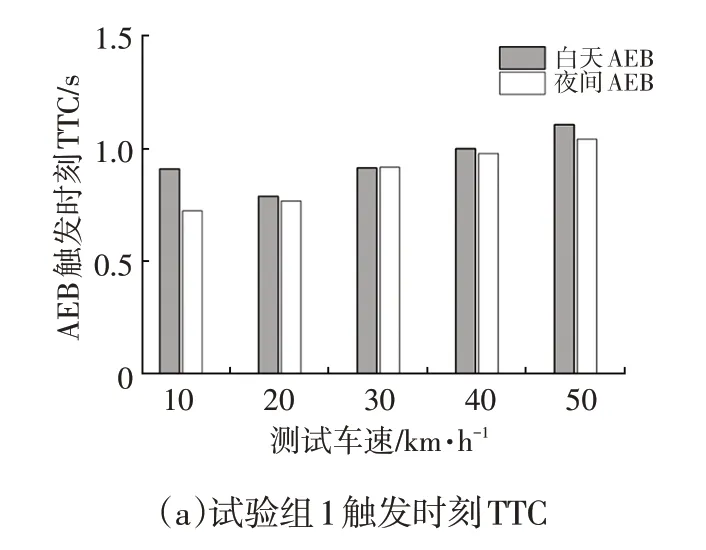
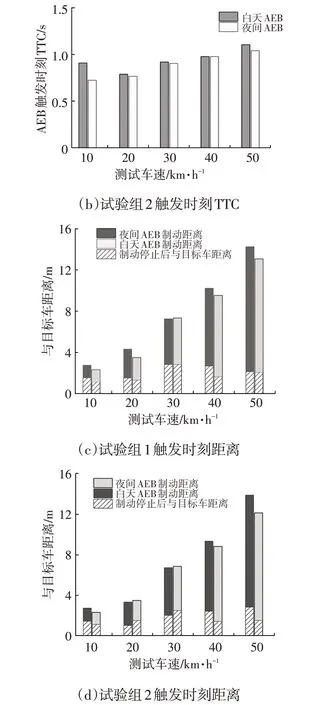
图4 车辆A自动紧急制动功能夜间测试
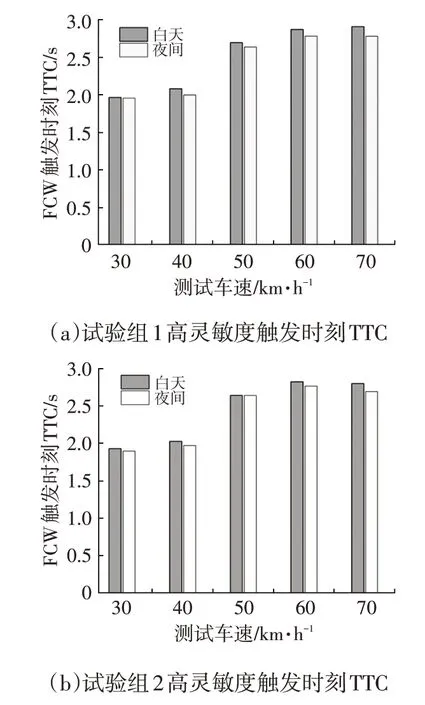
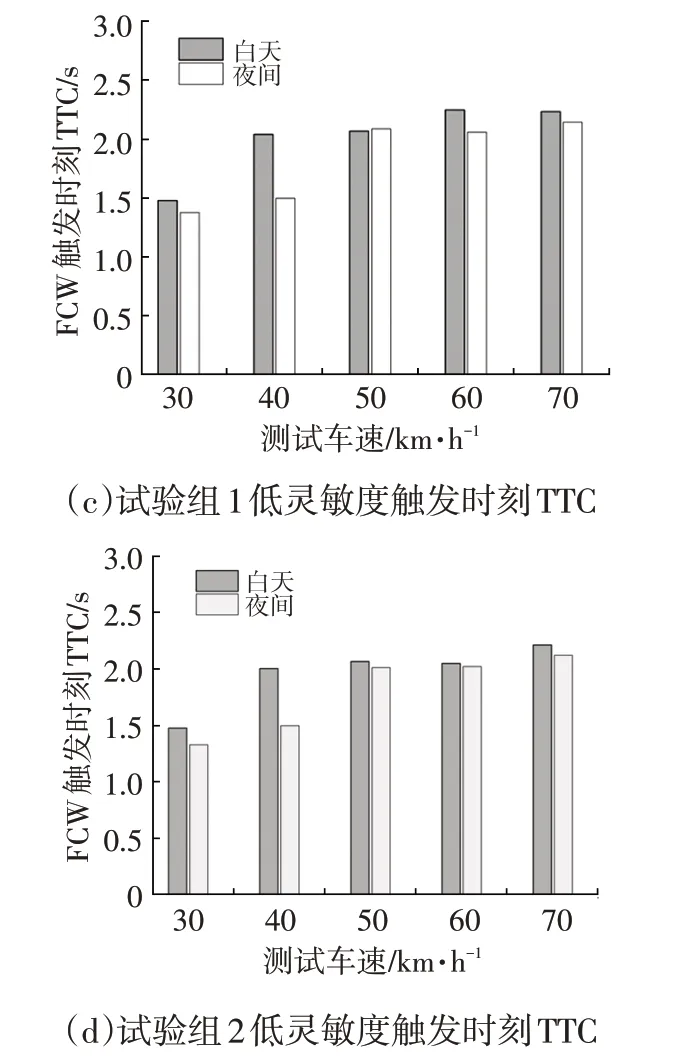
图5 车辆A前向碰撞预警功能夜间测试结果
夜间场景中,车辆A 的AEB 系统存在漏识别情况,夜间CCRs 测试有13%的漏识别率,而白天场景未出现漏识别。
车辆B AEB 功能的表现如图6 所示。白天场景中的AEB功能触发时机较夜间场景早。并且在夜间高速场景下,由于摄像头在夜间的探测距离有限,激活时刻明显较晚。
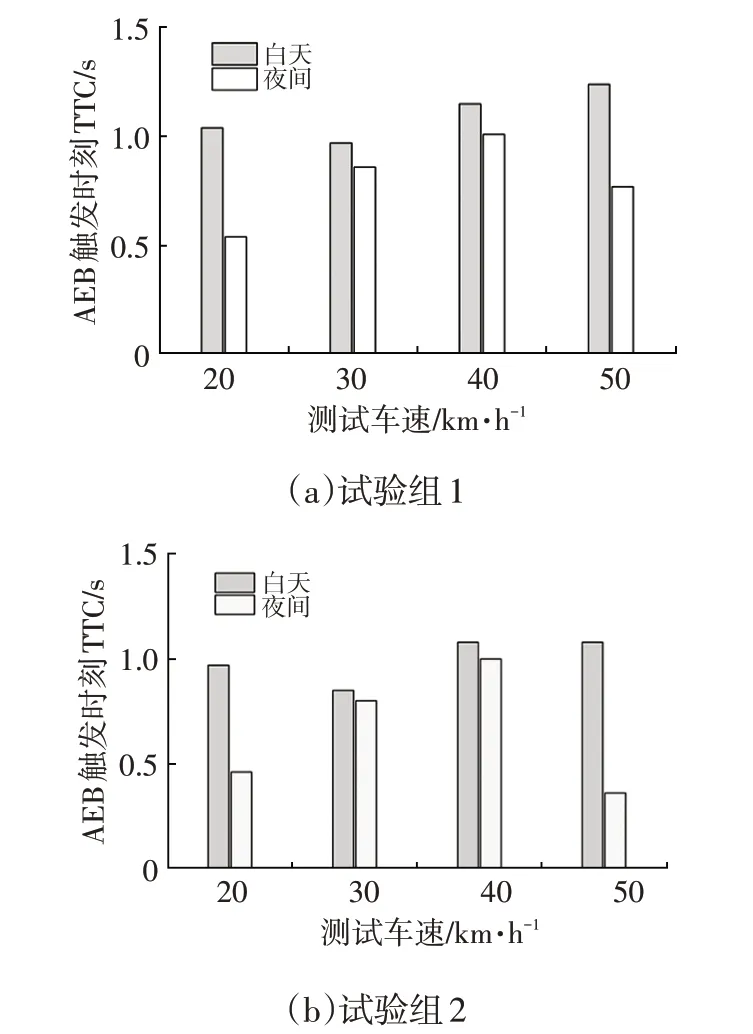
图6 车辆B自动紧急制动功能夜间测试结果
车B FCW 功能的表现如图7 所示,FCW 功能的灵敏度设置为中档。白天场景中的FCW功能触发时机较夜间早,并且由于摄像头在夜间的探测距离有限,夜间高速的场景中,FCW 功能的触发距离远小于对应的白天场景中的触发距离。

图7 车辆B前向碰撞预警功能夜间测试结果
综上所述,相较白天场景,夜间场景下两车的AEB功能触发和FCW 功能报警均较晚,且车辆A 系统存在漏识别情况,车辆B系统在夜间高速场景下系统各功能触发时刻TTC明显变小。
因此,增加夜间测试场景可以更好地检验系统的探测距离、目标识别能力和预警、制动功能触发时机。
在设计夜间场景的测试时,应保证试验过程中光照条件一致,并且测试车辆的远、近光灯状态应有明确要求,以保证测试场景的一致性。
4.3 儿童、自行车目标测试
道路交通伤害已成为我国0~17岁儿童及青少年伤害致死的第二大原因[5],为保护儿童在行走时的交通安全,对AEB 系统增加儿童目标的测试内容具有重大意义。AEB VRU测试用目标如图8所示。
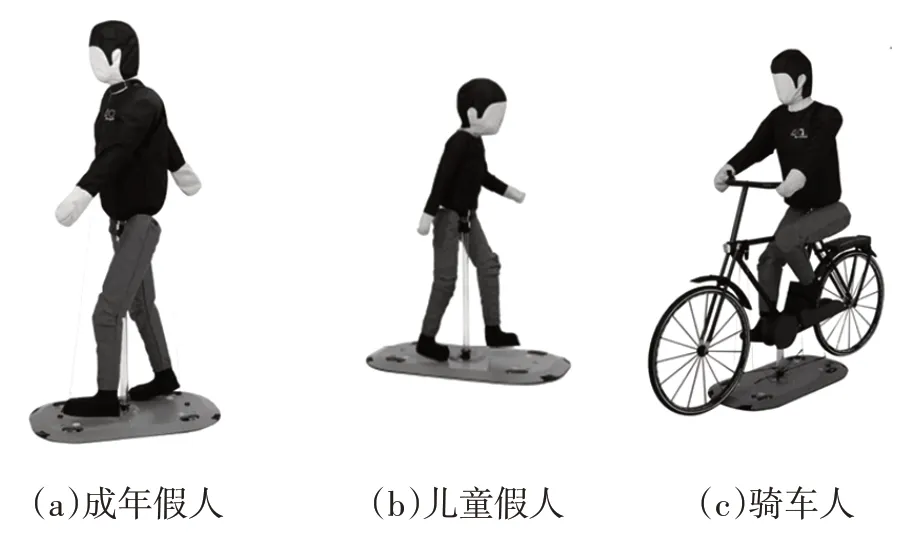
图8 AEB VRU测试用目标
儿童目标相比成年人目标体型矮小,受驾驶时视野高度的限制,不易被驾驶员及时发现。这个特点同样会对雷达、摄像头等传感器的识别功能产生影响,容易出现漏识别的情况。
本文分别使用儿童、成人两种目标对车辆A的AEB系统进行测试,车辆A的AEB功能表现如图9所示。在正确识别到目标的情况下,该AEB 系统对儿童目标触发制动的时机与对成年目标的触发时机大致相同。
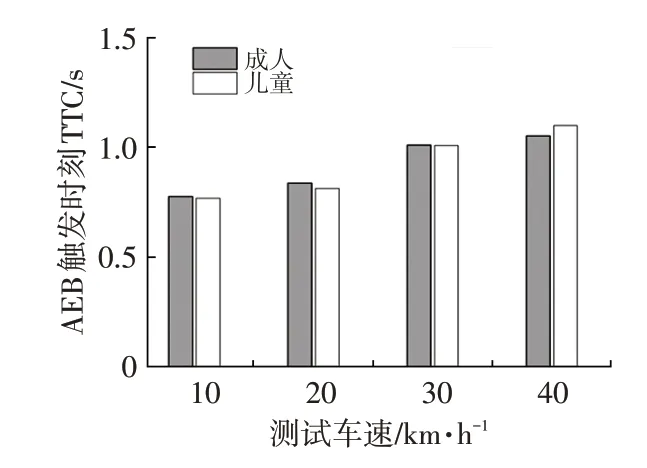
图9 车辆A儿童、成年目标制动紧急制动测试结果
车辆A系统对于儿童目标存在漏识别现象,在6次试验中,2 次试验未采取制动。而成年目标在4 次试验中均被识别并完成减速制动。
2011~2016年非机动车道的交通事故年均增长3.3%,自行车事故时有发生[6]。自行车目标移动速度快,相比于行人目标,在横穿道路时进入摄像头视野较晚,会对摄像头传感器的识别造成影响,容易出现漏识别的情况。
本文使用自行车目标物,对车辆B的AEB系统进行自行车横穿场景的静态和动态(自行车目标物横穿速度为15 km/h)测试,动态场景的测试车速为30~60 km/h。
自行车在道路中央横向静止时,车辆B能正确识别到目标,并减速制动完成避撞;自行车从一端进行横穿时,车B均未能识别到目标。
综上所述,AEB系统对不同目标的识别能力具有较大差异,可以通过增加识别儿童目标或自行车目标的功能测试,对系统能否准确识别目标进行验证。
4.4 弯道测试
由于传感器的探测角度会限制系统对弯道中目标的识别,弯道的曲率半径会影响系统对两车间距的计算,弯道中车辆制动特性与直道不同等因素的影响,弯道场景的AEB 系统表现会与直道存在差异[7]。弯道测试的场景如图10所示。

图10 弯道测试示意
本文在曲率半径约500 m 的弯道,对车辆A 进行AEB CCRs试验,车辆A AEB功能表现如图11所示。由于AEB 系统传感器设定有一定的探测角度,且系统计算判定的碰撞几率和碰撞时间(Time To Collision,TTC)受弯道路况的影响,在部分弯道场景中,系统的响应时机与直道存在明显差异,且在低速(10~30 km/h)工况下两场景的差异较大。这表明在弯道场景中,该系统表现不稳定,且会出现过早制动的现象。
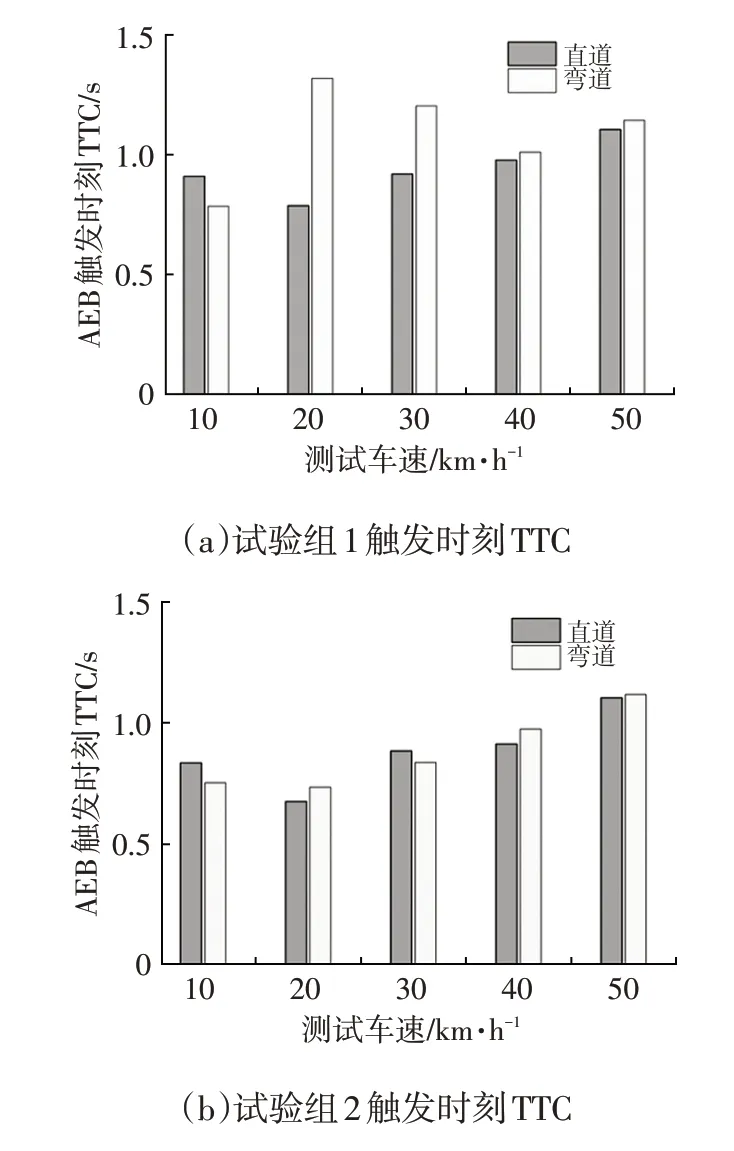

图11 车辆A自动紧急制动功能弯道测试结果
车辆A 弯道测试2 次试验结果对比如图12 所示。车辆的AEB功能在2次测试中表现差距较大,测试车速20 km/h 的试验组TTC 甚至相差0.5 s 以上。该AEB 系统识别到目标,并发出制动指令的时机不稳定。

图12 弯道测试2组试验结果对比
弯道场景中,AEB 功能的制动效果也与直道不同,如表3所示。从表3可以看出,弯道中车辆受AEB系统控制产生的最大减速度均高于直道同工况的减速度。这一方面是由于弯道中车辆的制动力会分解在纵向和侧向2 个方向,同等条件下,弯道内车辆需要更大的制动力来完成减速制动;另一方面,由于2 个场景中AEB功能响应时刻的TTC不同,AEB系统发出的减速度也会不同。
综上所述,弯道场景中车辆A AEB 功能的触发时机不稳定,会出现过早制动的现象,且弯道中车辆需要的制动减速度更大。因此,增加弯道测试场景,可以更好地检验系统的触发时机和制动能力。
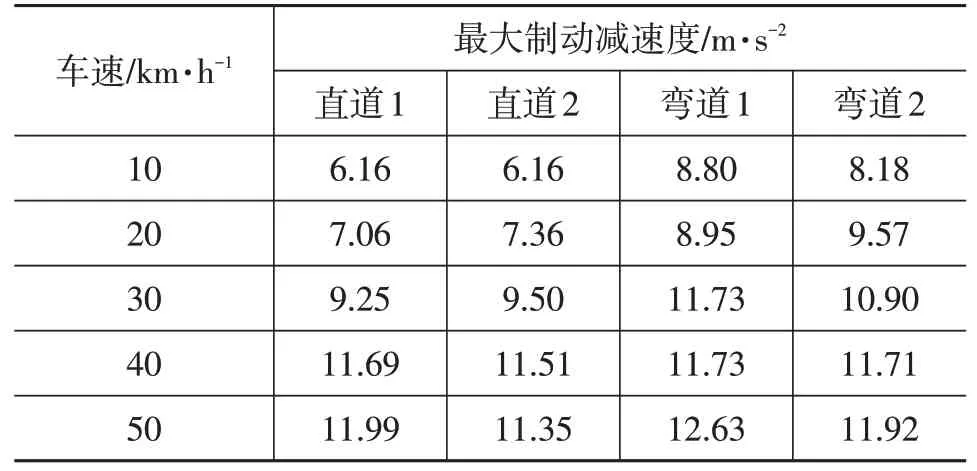
表3 最大制动减速度对比
在设计弯道测试场景时,应确定各场景所使用的弯道的曲率半径一致且合理,对测试车辆的行驶轨迹也应有统一要求,保证试验的一致性。
5 评价方法的研究
现行的AEB 系统评价规程中,评价参数多为车辆是否避撞和碰撞时的相对速度。根据车辆的避撞表现,每组试验会获得相应分数,最终根据各组试验权重计算出AEB系统的总得分。
这样的评价方式评价参数单一,难以全面的评价AEB系统的性能表现。加入其他评价参数,如系统响应时刻的TTC、制动减速度峰值、制动距离、制动策略等,可以使评价更全面、丰富。
5.1 碰撞时间
《C-NCAP 管理规则(2018年版)》对于AEB和FCW功能触发时刻的TTC还没有明确的评价方法,只是要求FCW功能的触发时刻TTC应小于4 s。
本文以FCW 功能为例,从数据库中随机抽取90 组试验结果(CCRs、CCRb、CCRm场景的比例为4∶3∶2),对触发时刻TTC的统计结果如表4所示。

表4 前碰撞预警功能报警时刻TTC统计结果
抽取的试验结果中,碰撞时间大于4 s 的试验有2组,可以看出大部分试验结果均满足目前评价规范的得分要求,但是FCW的触发时机分布并不均匀,报警时刻较早(3~4 s)和较晚(1.2~2 s)的试验结果也占有很大比例。要进一步评价FCW 功能的触发时机,就需要细化评价的等级。
为了分析不同测试车速下FCW报警时刻TTC的分布规律,本文以CCRs场景为例,抽取每个测试车速下的5组有效数据进行分析,结果如图13所示。
由图13可以看出,随着车速的增加,报警时刻TTC呈逐渐增大的趋势。文献[8]的研究也表明,与FCW 功能相类似,AEB功能的制动时刻TTC也应随着车速的增加呈增大趋势。

图13 不同车速报警时刻TTC
当车辆处于高速行驶状态,较大的报警时刻TTC可以保证驾驶员有充足的时间进行减速制动,但若车辆行驶速度较低,则会影响驾驶员的驾驶体验。因此,若将报警时刻TTC作为评价参数,可采用根据测试车速分级设定评价参数的评价方法。
5.2 制动减速度峰值
制动减速度峰值是评价制动时驾驶员驾驶体验的重要参数,主要可应用于AEB功能的评价方法。由于AEB功能触发时两车往往有紧急的碰撞危机,因此系统采取的制动减速度往往较大。根据测试车速不同,制动减速度峰值大多在6~14 m/s2的范围内,这与AEB功能的触发时机、系统发出的减速度、实际制动效果均有关系。
本文以CCRs 场景为例,从数据库中随机抽取每个车速下5组有效数据进行分析,结果如图14所示。

图14 不同车速下的减速度峰值
由图14可以看出,随着车速的增加,报警时刻TTC呈逐渐增大的趋势。当车辆处于高速运动状态,需要更高的减速度来降低碰撞速度或避撞;当车辆处于低速时,在保证系统可以完成减速避撞的前提下,较低的减速度峰值可以带来更舒适的驾驶体验。若将制动减速度峰值作为评价参数,同样可采用根据测试车速分级设定评价参数的评价方法。
5.3 制动停止后距离
制动停止后距离是指车辆在完成减速避撞后与目标的纵向相对距离。若制动停止后距离较大,则AEB功能的触发时机过早或系统发出的减速度命令过大,这都会影响驾驶员的驾驶体验。因此,制动停止后距离可用于AEB功能的触发时机和制动效果的综合评价。
本文从数据库中随机抽取120 组试验结果(CCRs、CCRb、CCRm、VRU 场景的比例为4∶3∶2∶3),对制动停止后距离的统计结果如表5所示。

表5 制动停止后距离统计结果
统计结果显示,120 组试验中,制动停止后距离较远(2~3 m)的占30.4%,距离过远(>3 m)的占13.6%。这表明AEB功能在很多场景下存在触发时机过早或系统发出的减速度命令过大的问题。因此,将制动停止后距离作为AEB系统的评价参数很有必要。
6 结束语
通过分析现有的测试评价规程并结合实车测试结果,本文从测试场景和评价参数两方面探究了AEB 系统的测试评价方法,并提出了优化建议。测试场景方面,增加碰撞点偏置测试、夜间测试、儿童目标测试、自行车目标测试、弯道测试可以更好地测试AEB 系统识别目标的能力和系统响应的时机;评价参数方面,碰撞时间、制动减速度峰值、制动停止后距离可以更全面地评价AEB系统的表现。
