舰载无人机弹射杆操纵系统设计与仿真
2020-05-22
(成都飞机工业(集团)有限责任公司技术中心, 四川 成都 610092)
引言
无人舰载机是以航空母舰为基地的海上固定翼飞机,是航母的主要攻防武器,也是形成航母战斗群作战能力的基础和根本。舰载机能够迅速、可靠地起飞是保证航母战斗力的最主要技术条件之一。
无人舰载机的起飞技术主要有弹射起飞和滑跃起飞。弹射起飞是指用弹射器给舰载机施加外力,使其迅速增速而“弹射升空”;滑跃起飞是指先依靠自身动力在航母水平甲板上滑跑,后经航母舰首斜曲面甲板,使舰载机在离舰瞬间袴分速度,实现离舰起飞。弹射起飞与滑跃起飞相比,弹射起飞降低了对舰载机的要求,弹射起飞所需的跑道长度较短,弹射起飞可保证多架舰载机以较短时间间隔起飞作战,满足实战需求[1-2]。
飞行实践证明,弹射起飞方式安全、可靠,是大中型航空母舰的首选。舰载机弹射杆操纵系统是决定弹射起飞成功与否的关键因素之一[3-4]。
国内目前还没有成功应用的弹射舰载无人机,对弹射杆操纵系统的研究较少。本研究设计了一套舰载无人机弹射杆操纵系统;并对弹射杆收上、放下、与往复车挂接等进行了仿真分析[5-12]。
1 弹射杆操纵系统组成和工作原理
弹射杆操纵系统主要实现弹射杆的解锁、收上、放下、保持下压力、与往复车挂接等功能。
弹射杆操纵系统由泵源、开锁电磁阀、开锁作动器、驱动电磁阀、旋转作动器等组成,其中旋转作动器由液压马达、扭簧、减速机构、连杆机构组成。弹射杆操纵系统原理如图1所示。
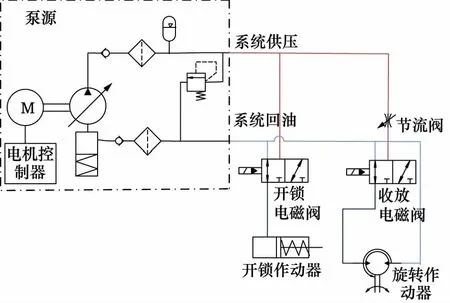
图1 弹射杆操纵系统
飞控发送指令启动电动泵,电动泵从自增压油箱中吸油,输出高压油经供压油滤为系统提供液压压力。
放弹射杆时,需先将弹射杆解锁;飞控发送指令控制弹射杆开锁电磁阀通电,高压油通过电磁阀进入开锁作动器无杆腔,活塞杆伸出,实现弹射杆解锁。收到解锁信号后,飞控控制弹射杆驱动电磁阀通电,高压油驱动液压马达旋转,通过减速机构将速度降低、扭矩放大后,经连杆机构带动弹射杆放下,放下到位后高压压力使弹射杆保持一定下压力。
收弹射杆时,需将开锁电磁阀和驱动电磁阀断电,关断高压油路,液压马达两腔压力通回油、开锁作动器通回油,弹射杆在旋转作动器中扭簧的作用下收上,开锁作动器在弹簧的作用下复位,实现弹射杆上锁。
2 系统建模
2.1 泵源模型
泵源由电动泵组件、油箱、供压油滤、回油油滤、单向阀、蓄压器、安全阀等组成。
泵源模型如图2所示。
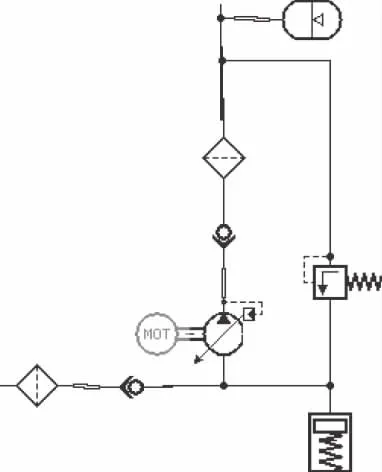
图2 泵源模型
2.2 弹射杆收放模型
弹射杆开锁电磁阀和驱动电磁阀均为二位三通电磁阀;开锁作动器的一腔通液压油,另一腔为弹簧;开锁作动器的负载用质量块模拟;旋转作动器集成液压马达、减速器、扭簧,其中液压马达的工作腔与电磁阀接通,另一腔直接通回油;弹射杆收放单元模型如图3所示,模型中限流孔模拟马达的内漏。
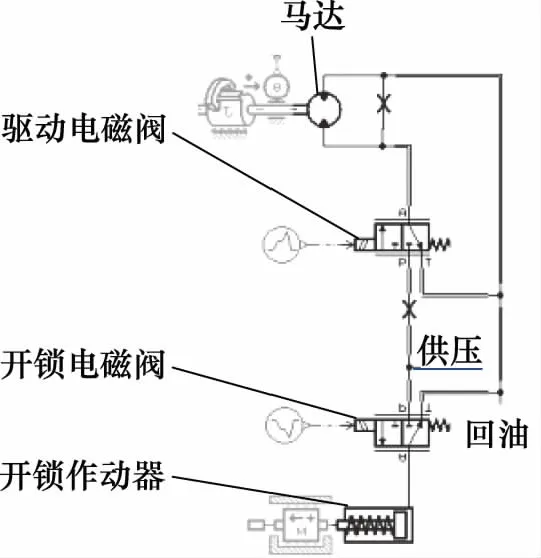
图3 弹射杆收放单元
弹射杆运动机构采用四连杆驱动,建模时将连杆简化为平面上的杆;弹射杆上往复车过程中,弹射杆触地端头会受到外力,用信号库模拟外力,给弹射杆施加载荷。弹射杆运动机构模型如图4所示。
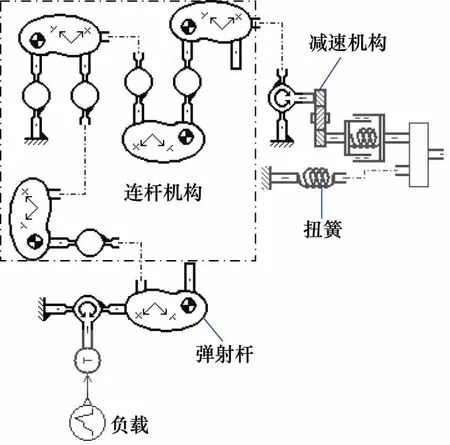
图4 弹射杆运动机构模型
2.3 系统模型
将各元件模型按系统原理及物理关系连接,组成整个系统的模型,如图5所示。
3 仿真分析
3.1 仿真输入
仿真需输入弹射杆解锁指令、弹射杆放下指令、弹射杆收上指令、弹射杆受外载荷。
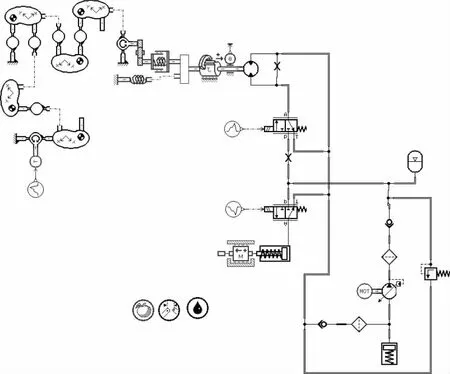
图5 弹射杆操纵系统模型
弹射杆放下触地后上往复车,此时弹射杆有一定下压力,往复车会施加给弹射杆一个反向力矩,曲线如图6所示。弹射杆上往复车过程中,反力矩逐渐增大,弹射杆与往复车挂接成功后,此时反力矩消失。
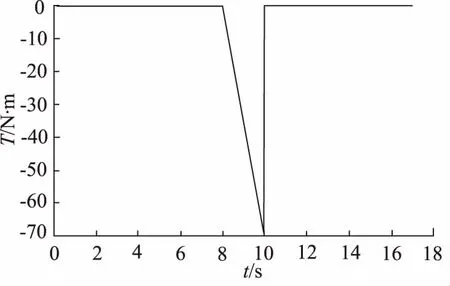
图6 弹射杆负载曲线
3.2 弹射杆操纵仿真
弹射杆初始位置为收上位置,通过控制电磁阀通断,T1时开锁电磁阀通电,弹射杆解锁;T2时收放电磁阀通电,弹射杆放下;T3时开锁电磁阀和收放电磁阀同时断电,弹射杆收上,对弹射杆进行收放仿真分析。弹射杆运动角度(收上位置角度为0°)曲线如图7所示,液压马达两腔压力曲线如图8所示,电动泵输出压力曲线如图9所示,电动泵输出流量曲线如图10所示。
分析图7~图10可知:
(1) 弹射杆放下和收上过程运动平稳。放下时间3 s,上往复车时,弹射杆反转一定角度,越过往复车后弹射杆继续放下;弹射杆收上时间3 s;
(2) 弹射杆放下过程中马达两腔压力为4.3 MPa,低压腔约1 MPa;弹射杆上往复车过程中,马达反转,高压腔压力略微上升;电磁阀断电收弹射杆时,马达两腔均通回油,压力下降至0.5 MPa;
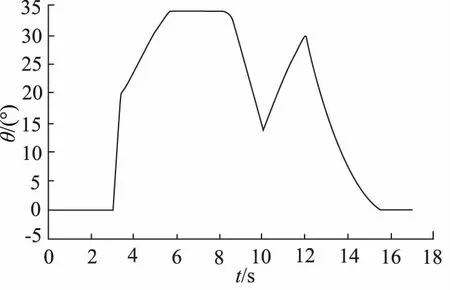
图7 弹射杆运动角度曲线
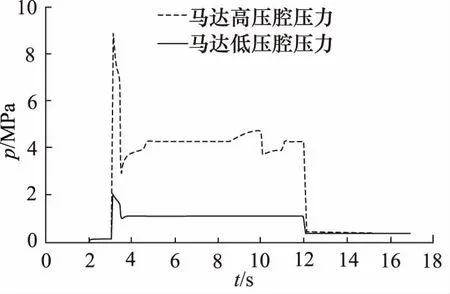
图8 液压马达两腔压力曲线
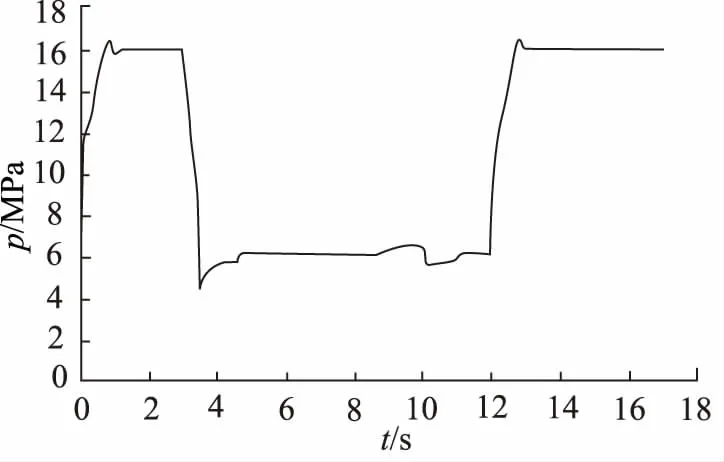
图9 电动泵输出压力曲线
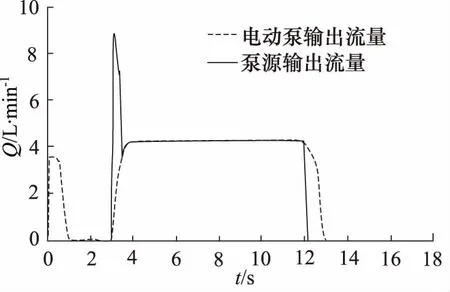
图10 电动泵输出流量曲线
(3) 0~1 s电动泵向蓄压器充压,弹射杆放下过程中,泵源压力下降至6 MPa,因马达内漏较大,弹射杆放下到位后,内漏导致泵源压力稳定在6 MPa;弹射杆收上后,泵源压力稳定在额定压力;
(4) 弹射杆放下过程中,蓄压器向系统补充流量,放下到位后,因马达内漏影响,泵源持续输出一定流量;收弹射杆后,电磁阀断电,马达内漏不影响,泵源输出流量为0。
仿真结果表明弹射杆操纵系统功能、性能满足要求;弹射杆收放过程稳定、平稳;液压马达内漏影响系统泵源建压,内漏在一定范围内不影响系统功能和性能,但会造成系统无效功率增大;内漏若超过一定值,系统压力较低,影响弹射杆放下到位和放下时间。
4 结论
本研究设计了一套舰载无人机弹射杆操纵系统,基于AMESim仿真平台建立了系统仿真模型,考虑了关键元件内漏等因素,对系统功能、性能进行了仿真,提出了执行机构内漏对系统的影响,仿真表明系统设计合理、功能性能满足要求。
