某电控液驱车辆比例阀控马达系统特性研究
2020-05-22
(陆军工程大学 野战工程学院, 江苏 南京 210001)
引言
某电控液驱车辆是一种采用液压储能新型动力传动技术的车辆。以液压传动替代机械传动,可有效提高车辆的越野性能和燃油经济性。其中电液比例阀控马达系统的控制性能对车辆的加速性能和制动性能至关重要。电液比例阀控马达系统是用电液比例阀作电液转换及控制元件,用液压马达作执行元件,对速度、位置、压力等机械量进行控制的系统。为了提高电控液驱车辆的加速性能和制动性能,液压马达的转速控制至关重要。因此,对电液比例阀控马达系统进行研究具有重要的现实意义[1-2]。
在电液比例阀控马达系统中,一般采用PID控制器来实现马达转速的控制,但PID控制依赖于精确的数学模型,对于非线性、时变不确定系统难以建立其相关模型。进而出现一些改进型PID控制方法,例如模糊PID、神经网络PID、基于遗传算法整定的PID等[3-5]。文献[1]采用PID控制算法对阀控叶片气马达系统进行恒转速控制研究;文献[6]分别采用常规PID控制和参数自整定的模糊PID控制策略来实现液压马达的恒速控制;文献[7]采用模糊自整定PID控制方法对变排量液压马达系统进行了速度控制和运动位置控制;文献[8]提出一种对传统PID控制进行基于NCD模块非线性优化的思路对伺服阀控马达系统进行了静态和动态响应分析;文献[9]采用神经元PID控制器的改进算法对阀控马达调速系统进行转速控制研究。
上述研究大多采用传统PID控制和一种改进的PID控制策略进行比较分析液压马达系统的转速控制。本研究分别采用变结构抗饱和PI控制和模糊PID控制2种控制方法来设计电液比例阀控马达系统的控制器,以此提高系统的控制性能。
1 系统组成及工作原理
电液比例阀控马达系统由液压系统和电气系统组成。其中液压系统主要由液压泵、电液比例阀、液压马达和负载等部分组成。电气系统由与液压系统相对应的控制器、比例放大器等控制元件组成。电液比例阀控马达系统原理图如图1所示。
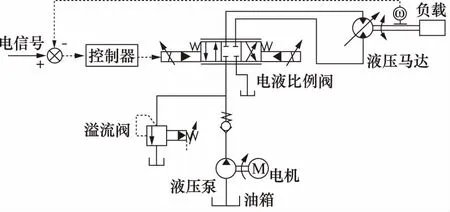
图1 电液比例阀控马达系统原理图
电液比例阀按输入电信号的极性和幅值大小对液压系统液流方向和流量进行控制,从而实现对液压马达运行方向和速度的控制[7-9]。系统的流量与输入电信号的幅值成正比。
2 控制器的设计
本研究分别采用变结构抗饱和PI控制和模糊PID控制对电液比例阀控马达控制系统的控制器进行设计。
2.1 变结构抗饱和PI控制
PID控制器由于其方便设置与实现、较好的鲁棒性等特点而应用广泛。在电液比例阀控马达系统中,因为运行工况时的输出压力波动较大,尤其是在低压力情况下,液压马达极易处于饱和状态,而不加任何改进的PID控制器不能满足这种状况和其他非线性现象的要求,所以,本节拟选用具有抗饱和功能的变结构抗饱和PI控制器[10],其控制结构如图2所示。
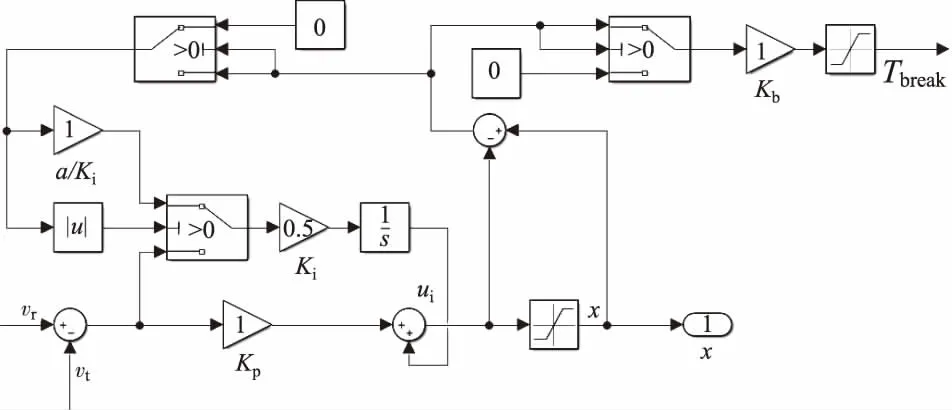
图2 变结构抗饱和PI控制器结构
图2中vr为驾驶循环确定的期望车速;vt为从系统反馈回的实际车速;Kp,Ki分别为变结构抗饱和PI控制器中的比例和积分控制参数;u,ui为控制信号;a为抗饱和设计参数;x为输出信号,用来控制液压马达中的阀位移,从而控制排量;Kb为x到Tbreak的转换系数。根据经验,a的选取应该使积分器反馈回路的设置时间比闭环设计快2~5 s[10]。
在驱动工况时,变结构抗饱和PI控制器发挥抗饱和作用;在制动工况时并不发挥作用,因为机械制动器的起用能够弥补液压马达的液压制动。当液压马达处于驱动工况且控制信号u达到饱和值时,结构选择器Switch发挥抗饱和作用,从而调整值ui使得u快速返回到限定值内。虽然这种控制方法使得u在限定值附近迅速波动,但是通过设定采样周期可以减小其波动幅值,降低对整个系统的影响。另外,控制信号u持续在限定值邻域能够使其快速平滑进入边界内,进而有益于系统的动态。当液压马达工作于制动工况且控制信号u达到饱和值时,机械制动器启动。
2.2 模糊PID控制
模糊PID控制是一种将模糊理论与PID控制相结合的控制方法。这种控制方法主要将不易精确表征的工程经验与基本的PID控制联合起来,以此达到控制目的。将模糊理论与PID参数一起放入规则库中,进而经过模糊推理、反模糊化接口,实现对控制对象的最佳控制,这种控制方法称为模糊PID控制[11-14]。
1) 模糊控制器结构的确定
在电液比例阀控马达系统中,主要是分析液压马达转速的控制性能,从而将转速的偏差和偏差的变化率设定为控制器的输入变量。为了简化控制规则和提高系统响应,本节将双输入三输出结构转化为3个双输入单输出结构。
模糊PID控制原理如图3所示,其设计思想是利用模糊控制器以实现对PID控制器中3个控制参数自动调整的目的。

图3 模糊PID控制原理
图3中r(t)为系统期望值;e,ec分别为系统偏差和偏差变化率;y(t)为系统实际输出值;E和EC分别为模糊化后的系统偏差和偏差变化率;KP,KI和KD分别是模糊PID控制器中的比例、积分和微分控制参数。控制目的是使得y(t)达到期望值r(t)。
2) 确定变量论域
本节将马达速度偏差E和速度偏差变化率EC作为控制器的输入变量,通过分析两者的变化来决定输出变量KP,KI和KD。假如各个变量要选取多个值,虽然设计控制规则灵活、细致,但是增加了控制复杂性和难度,所以,为了兼顾灵活细致、简便易行,本控制器将各个变量的基本论域都定在[-6,6],-6附近用NL表示,-2附近用NS表示,0附近用ZE表示,2附近用PS表示,6附近用PL表示。
3) 变量隶属度函数设计
本节在偏差较大的范围区域选用分辨率较低的正态分布,在偏差较小的范围区域选用高分辨率的三角形隶属度函数,以此获得良好的鲁棒性。偏差E和偏差变化率EC的隶属度函数一样,如图4所示, 输出变量KP,KI,KD的隶属度函数一样,如图5所示。
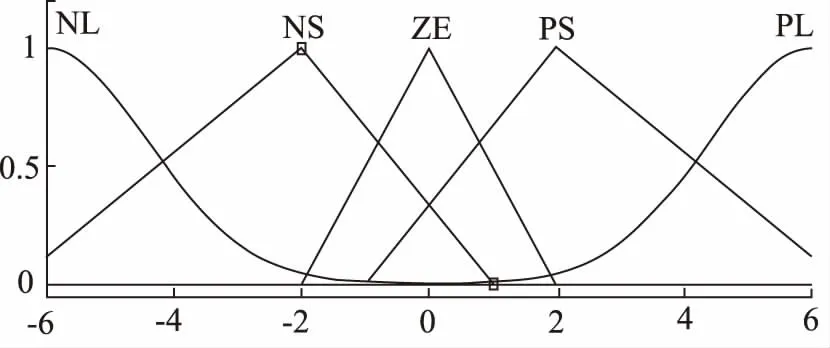
图4 输入变量E和EC的隶属度函数
4) 模糊规则设计
模糊规则是一条条模糊条件语句的整合, 是输入变量与输出变量之间的映射关系。本模糊PID控制器的PID参数自调整原则如下:
(1) 当马达速度偏差E较大时,为缩短响应时间,取较大的KP;为预防出现较大的超调,产生积分饱和,应限制积分,取KI为0;KD应取较小的目的是为了防止偏差E的突然增大导致出现控制失效和微分过饱和现象;
(2) 当马达速度偏差E和速度偏差变化率EC为中等数值时,为使系统不出现较大的超调,应取较小的KP和适当的KI;此时KD的取值显得格外重要,为确保系统的响应速度,应取值适当;
(3) 当马达速度偏差E较小时,即在设定值附近时,取较大的KP,KI值;为了增强系统适应复杂环境的能力,EC较大时,KD取较小值,EC较小时,KD取较大值。
由以上分析可知,KP,KI和KD的模糊推理规则如表1所示。
本研究采用Mamdnai法进行推理,以简化运算方法和缩短推理时间。
5) 反模糊化控制变量
模糊推理出的控制输出是模糊量,因此,还需要进行反模糊化,本节采用应用较广的重心法,之后便可得到精确控制量,实现精准控制。
3 仿真分析
利用MATLAB/Simulink软件建立了电液比例阀控马达系统的仿真模型,如图6所示。图6中的Control Unit部分分别采用了变结构抗饱和PI控制和模糊PID控制两种控制方法,这一部分的展开模型分别如图7和图8所示,图8中的Fuzzy_PID Controller展开模型如图9所示。系统的主要元件参数如表2所示。
对于PI(saturation)控制器,取Kp=1,Ki=0.5,a=0.5;对于Fuzzy_PID控制器,设定参数值:a1=1.25,a2=50,a3=0.25,a4=0.8,a5=0.06。a1,a2分别为控制器输入偏差信号和偏差变化率信号的模糊化因子,a3,a4,a5分别为控制器输出比例增益解模糊因子、积分系数解模糊因子和微分系数解模糊因子。
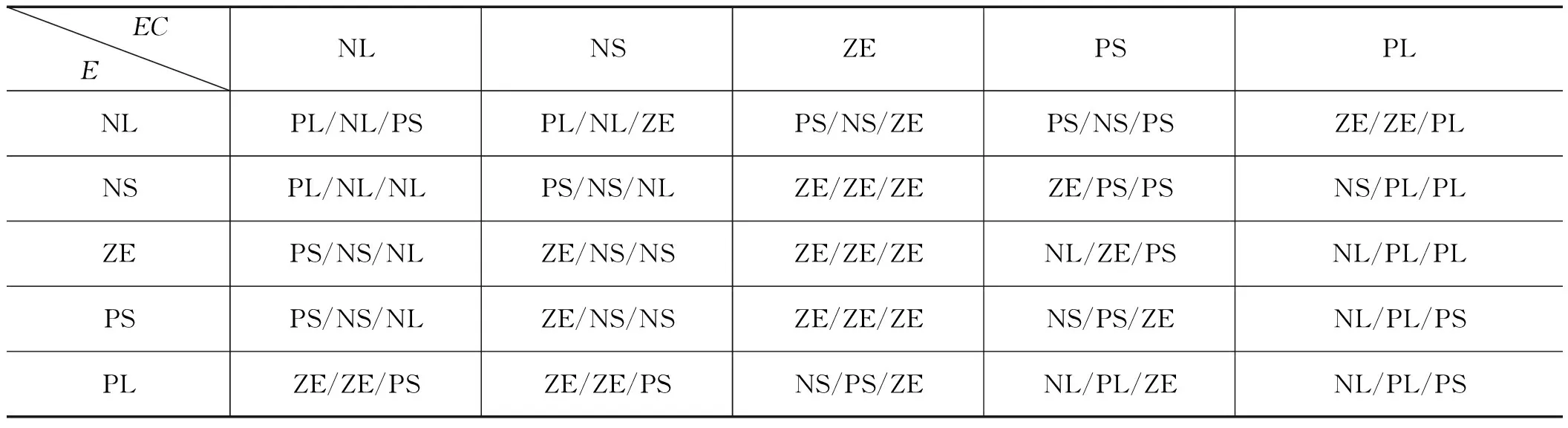
表1 模糊推理规则表

图6 马达/制动器控制模块仿真模型

图7 采用PI(Saturation)控制器的控制单元模型

图8 采用Fuzzy_PID控制器的控制单元模型
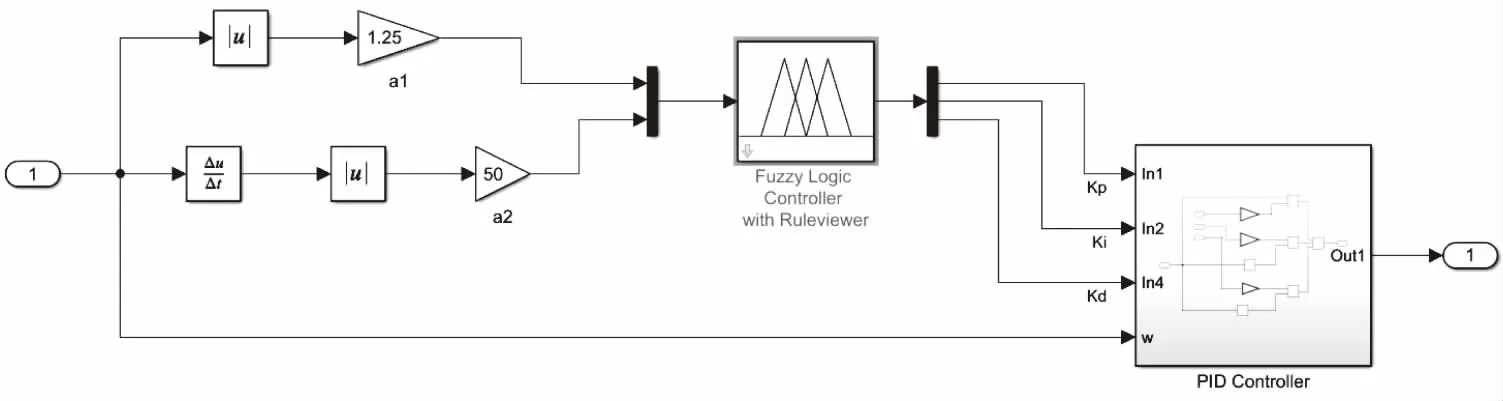
图9 Fuzzy_PID Controller展开模型

表2 主要元件参数
在相同初始条件下,分析比较2种不同的控制器在系统阶跃信号下的控制效果。在第2 s时给以333 rad/s 的转速阶跃信号(转换成直线速度为96 km/h),第10 s时进行制动,液压马达转速响应曲线如图10所示。
通过分析图10可知:
(1) 由图10a可知,液压马达在2种控制器作用下的转速响应都没有超调,说明2种控制方法都具有一定的稳定性;
(2) 由图10b和图10c可知,采用PI(Saturation)控制器的液压马达加速时间为0.37 s,制动时间为0.33 s;采用Fuzzy_PID控制器的液压马达加速时间为0.30 s,制动时间为0.38 s。经过计算可得,Fuzzy_PID控制器相比PI(Saturation)控制器,其加速性能提高10.8%,制动性能提高9.1%,说明Fuzzy_PID控制器比PI(Saturation)控制器的响应速度更快, 具有更好的动态响应特性。
4 结论
本研究针对电液比例阀控马达系统,分别采用变结构抗饱和PI控制和模糊PID控制对控制器进行设计,并运用MATLAB/Simulink软件建立了系统的仿真模型。仿真结果表明,这两种控制方法的转速响应都没有超调,控制相对稳定,但与变结构抗饱和PI控制相比较,模糊PID控制的响应速度更快,提高了液压马达的加速和制动性能。所以,模糊PID控制对提高电控液驱车辆的加速性能和制动性能具有一定的借鉴意义。

图10 液压马达转速响应曲线
