重载半主动波浪补偿液压系统功率特性试验研究
2020-05-22宋豫
宋 豫
(1.上海振华重工(集团)股份有限公司 陆上重工设计研究院, 上海 200125;2.上海振华重工(集团)股份有限公司 国家海上起重铺管核心装备工程技术研究中心, 上海 200125;3.上海振华重工(集团)股份有限公司 上海港口机械工程技术研究中心, 上海 200125)
引言
近年来,我国海洋科技进入了快速跃升的时期,包括海洋通用工程技术、海洋资源勘探开发技术、海洋环境检测技术等诸多领域都得到了充分的发展,取得了突破性的进展,大大缩短了与海洋技术先进国家的差距。
海洋工程及开发中,船舶起重机是重要的基础性装备,并且需求量也在逐年的增长。同时,随着越来越多的作业对吊装定位精度、平稳性的要求的提升,除采用自升式平台外,更多的是需要起重机配备波浪补偿系统,并且该技术也广泛应用于打捞装备上[1]。现有的重载波浪补偿技术主要由国外厂商垄断,通过本次研究,突破了重载波浪补偿系统的结构优化、母船运动预测传感、补偿控制算法等关键核心技术,具备国产化成套的能力,大幅降低了产品的价格与供货周期,有助于进一步促进我国海洋技术的发展。
波浪补偿系统主要分为[2]被动补偿系统[3-5](passive heave compensation,PHC)、主动补偿系统[6-8](active heave compensation,AHC)和半主动补偿系统[9-11]。PHC系统采用蓄能器与液压缸组成的液压弹簧系统,对外载荷变化进行开环的被动自适应,其补偿精度不可控,但能耗极低。AHC系统通过主控元件实时闭环控制补偿液压缸或马达的运动,控制精度高,但能耗巨大。半主动补偿系统是PHC与AHC系统的整合,即获得PHC的节能特性,又保留了AHC的高精度特性。
目前,波浪补偿系统的研究主要集中在系统构型及控制方法上,鲜有对系统功率特性的深入分析。本研究以重载半主动波浪补偿液压系统作为研究对象进行实验研究,分析负载、运动幅值、运动周期变化时补偿系统的补偿控制精度与功率特性。
1 试验系统
本研究的重载波浪补偿系统应用于海上浮吊,目标实现最大载荷200 t,最大波高±2.5 m,最大波浪周期8 s情况下的主动波浪补偿功能,补偿率大于90%。
若选用被动型波浪补偿系统,系统装机功率最小,经济性最好,但是补偿率一般在70%左右,不能满足高精度定位安装的要求;若选用主动型波浪补偿系统,则装机功率约4 MW,对于工程船,用电压力负担过大。因此,采用半主动波浪补偿系统,兼备上述2种系统的优势,大幅降低装机功率并且保证补偿控制精度,同时,半主动波浪补偿系统如果主动补偿装置故障,系统仍可工作于被动补偿状态,提高了系统的可靠性。
本试验系统的重载半主动波浪补偿液压系统原理图如图1所示,具备主动补偿与被动补偿功能,补偿液压缸采用了复合液压缸方案设计。
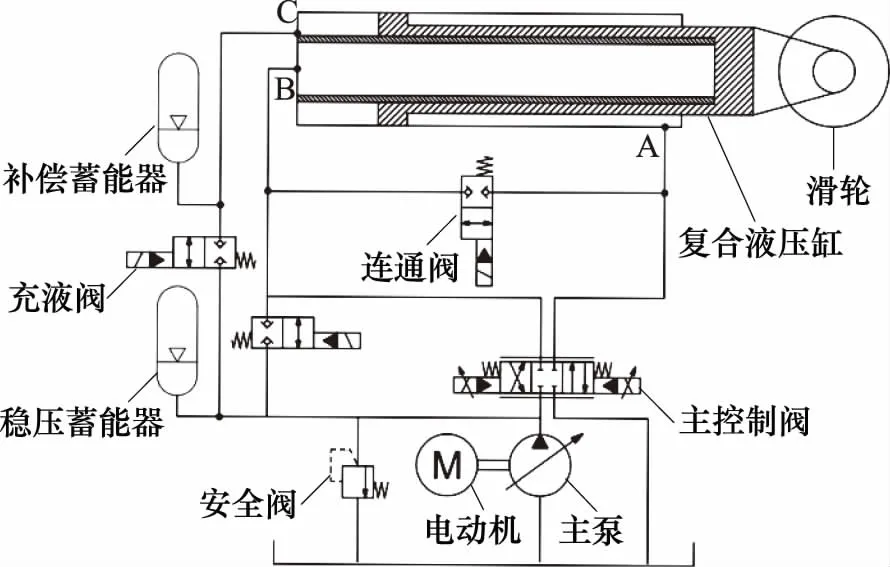
图1 重载半主动波浪补偿液压系统原理图
在半主动补偿状态下,连通阀与充液阀关闭,补偿蓄能器充气压力根据负载调定,实现重物负载的平衡,主控制阀采用闭环控制,实现复合液压缸的运动与船舶的升沉运动相抵消。
依次通过空载试验、轻载试验、满载试验对系统性能进行测试。空载试验完成系统功能验证与程序调试,轻载试验验证系统功能及控制系统参数匹配,重载试验完成性能测试。试验系统的整体布局如图2所示,试验系统如图3所示。
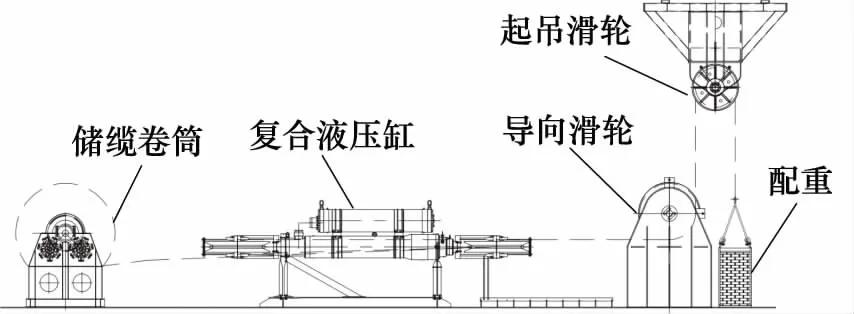
图2 试验系统布置图

图3 试验系统实景图
在实际海况下,波浪的起伏可视为不同幅值、频率的正弦曲线的叠加,因此,试验系统的测试输入信号采用正弦信号,可以较好的测试补偿系统的性能,反映系统的功率状态。
半主动波浪补偿液压系统在重载条件下工作时,复合液压缸的负载为货物重力负载与补偿蓄能器作用于复合液压缸产生的负载,同时货物一旦与海水接触,所产生的浮力也叠加在总载荷中,导致补偿液压系统负载存在时变非线性特性,单纯采用位置闭环控制已无法实现补偿控制精度的要求。本系统采用多状态复合控制,将负载速度反馈、负载加速度反馈与位置控制相结合,并引入大惯量负载的前馈补偿,大幅改善了补偿系统的动态特性。补偿液压系统控制方框图如图4所示[12]。

图4 液压系统控制方框图
2 试验分析
采用重载波浪补偿试验系统对补偿控制精度、功率特性分别进行了轻载试验与满载试验,对试验结果展开分析。
在补偿系统中,液压缸两端滑轮可视为动滑轮与定滑轮组,因此,负载的位移是补偿液压缸位移的两倍,由于位移传感器安装于复合液压缸,因此,下面的分析中均采用复合液压缸位移描述系统运动,其最大幅值为±1.25 m。
本研究中位移补偿精度定义为:
(1)
式中,ε—— 位移补偿精度
e—— 位移补偿误差,m
A—— 负载运动幅值,m
2.1 补偿幅值/周期与补偿精度的相关性
1) 轻载(20 t)试验补偿特性
在20 t载荷轻载试验中,分别改变运动幅值与周期,半主动补偿系统的位移补偿试验结果如图5、图6所示。
轻载试验在运动周期为8 s条件下,随着载荷运动幅值的增加,其位移补偿精度分别为93.53%, 93.44%, 93.41%,补偿控制精度变化不明显,系统抗运动幅值变化能力较强。

图5 轻载试验幅值变化时位移补偿结果
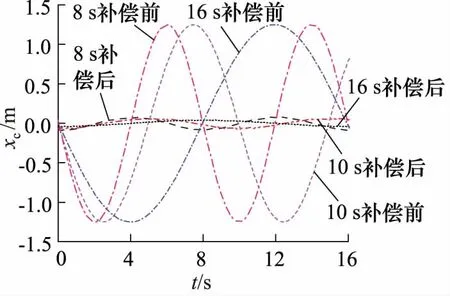
图6 轻载试验周期变化时位移补偿结果
轻载试验在运动幅值为1.25 m条件下,随着载荷运动周期的增加,其位移补偿精度分别为93.41%, 95%, 96.58%,补偿控制精度随之提高但变化不大,系统随运动周期的增加补偿效果逐渐提升。
2) 满载(200 t)试验补偿特性
在200 t载荷满载试验中,分别改变运动幅值与周期,半主动补偿系统的位移补偿试验结果如图7、图8所示。
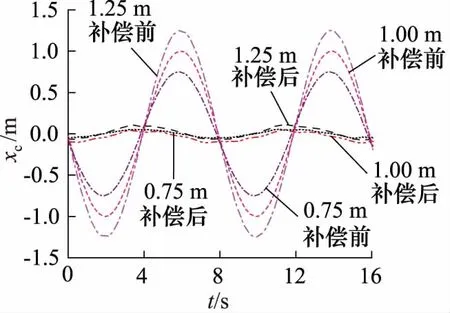
图7 满载试验幅值变化时位移补偿结果
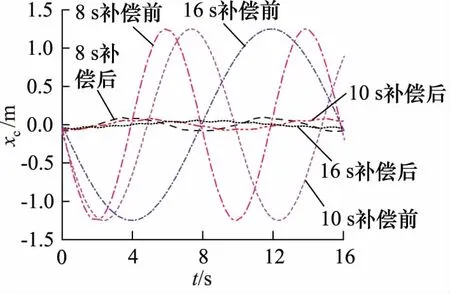
图8 满载试验周期变化时位移补偿结果
满载试验在运动周期为8 s条件下,随着载荷运动幅值的增加,其位移补偿精度分别为93.35%,93.05%,92.65%,补偿控制精度变化不明显。
满载试验在运动幅值为1.25 m条件下,随着载荷运动周期的增加,其位移补偿精度分别为92.65%,93.34%,95.24%,补偿控制精度随之提高但变化不大。控制方法随着运动周期的增加补偿效果逐渐提升。
综合轻载和满载试验补偿控制结果,当运动幅值、运动周期按照上述情况变化时,半主动升沉补偿系统能够很好的完成补偿控制,并且在载荷不同、幅值与周期相同时,补偿精度变化最大值仅为1.66%,控制系统具有较好的鲁棒性。
针对最恶劣的满载工况,由图7、图8所示,位移补偿精度如表1所示。
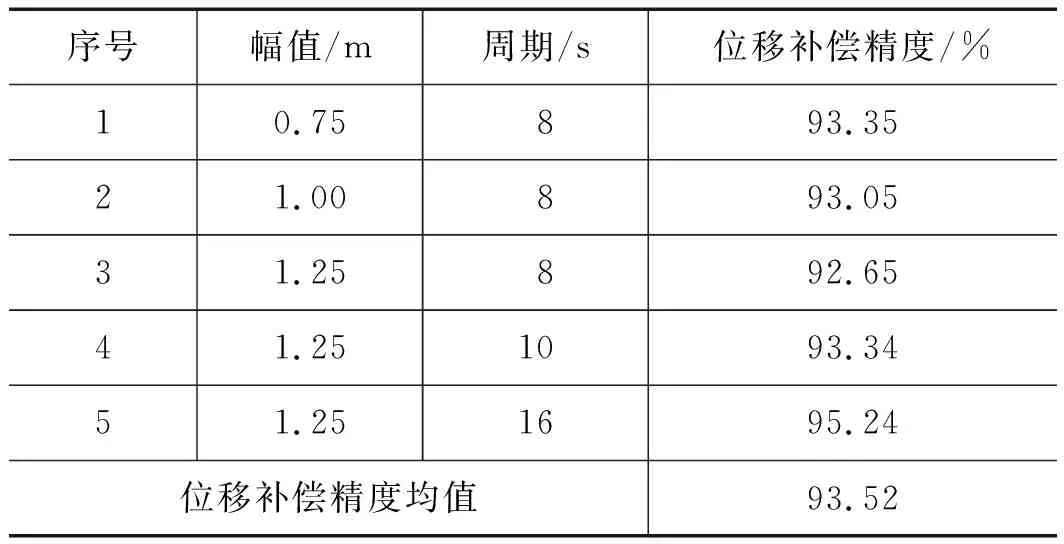
表1 满载试验位移补偿精度
满载试验位移补偿精度均在92.65%以上,典型工况下补偿精度均值可达到93.52%。补偿控制结果满足设备位置精度90%的需求。
满载试验在运动周期不变条件下,随着载荷运动幅值的增加,其位移补偿精度小幅降低,降低范围在0.7%以内,补偿控制精度变化不明显。
满载试验在运动幅值不变条件下,随着载荷运动周期的增加,其位移补偿精度小幅提高,提高范围在2.59%以内,补偿控制精度逐渐提升。
综上,在载荷一定的条件下,运动周期与幅值均对位移补偿精度产生一定的影响。其中,运动幅值的影响更为明显,若要保持更稳定的补偿控制效果,系统设计中需要合理设计复合液压缸的行程。并且,在实际条件下,运动周期和幅值均受到海况的影响,尽可能将系统配置与海况条件相匹配。
2.2 满载补偿幅值/周期与补偿能耗的相关性
为研究半主动波浪补偿系统的能耗规律,复合液压缸位移传感器与压力传感器分别测得满载状态下液压缸的速度与压力,并经过处理得到典型信号工况下主动补偿的功率谱,分别如图9、图10所示。
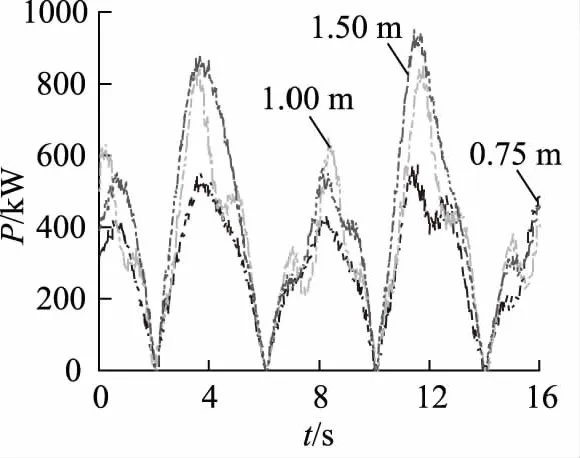
图9 满载试验幅值变化时主动补偿功率结果
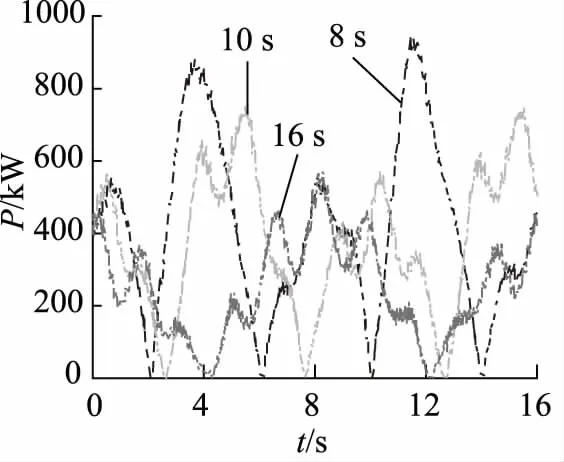
图10 满载试验周期变化时主动补偿功率结果
由图9、图10所示,满载试验复合液压缸主动补偿功率如表2所示。
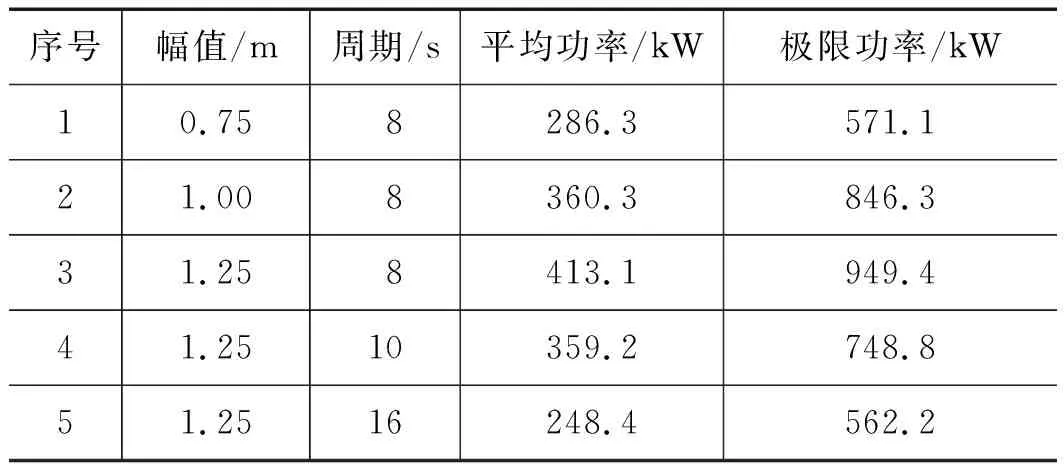
表2 满载试验主动补偿功率
满载试验在运动周期不变条件下,随着载荷运动幅值的增加,其功率明显上升,平均功率最大上升幅度44.29%,极限功率最大上升幅度66.3%;满载试验在运动幅值不变条件下,随着载荷运动周期的增加,其功率明显下降,平均功率最大下降幅度39.87%,极限功率最大下降幅度40.78%。满载主动补偿功率随着系统工况的变化,产生明显变化,运动的幅值与周期对功率的影响很大。
2.3 满载补偿幅值/周期与被动补偿节能效果的相关性
在典型信号工况下,系统负载功率为:
PL=FL×υL
(2)
式中,PL—— 负载的功率,kW
FL—— 负载的重力,N
υL—— 负载的速度,m/s
在满载试验中,分别改变运动幅值与周期,半主动补偿系统的复合液压缸速度试验结果如图11、图12所示。

图11 满载试验幅值变化时复合液压缸速度结果
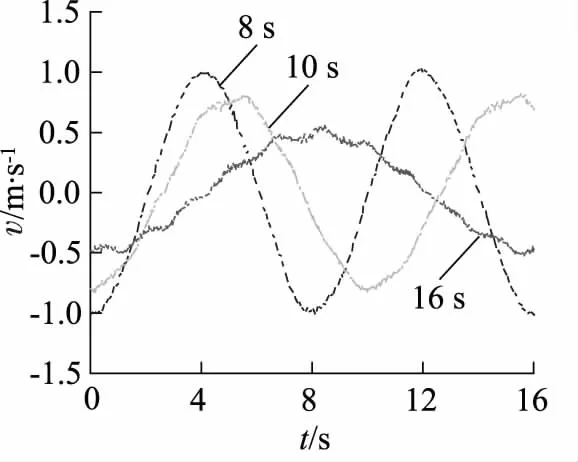
图12 满载试验周期变化时复合液压缸速度结果
根据图11、图12的速度曲线,计算得到半主动升沉补偿系统在不同运动幅度和周期时,负载的理论功率如表3所示。

表3 满载试验负载理论功率
表3可以看到,当周期固定为8 s时,随着运动幅值的变大,负载的平均功率、极限功率均在逐步变大。当运动幅值固定为1.25 m时,随着运动周期的变大,负载的平均功率、极限功率在逐步变小。
工作状态下,负载功率主要由AHC功率和PHC功率组成。PHC功率由存储在蓄能器中的压缩空气提供,因此,AHC功率为实际的使用能耗。
AHC的功率贡献比为复合液压缸功率与负载功率之比。比值越小,半主动补偿系统节能效果越好。
表4给出了半主动升沉补偿系统在不同运动幅度和周期时AHC的功率贡献比。
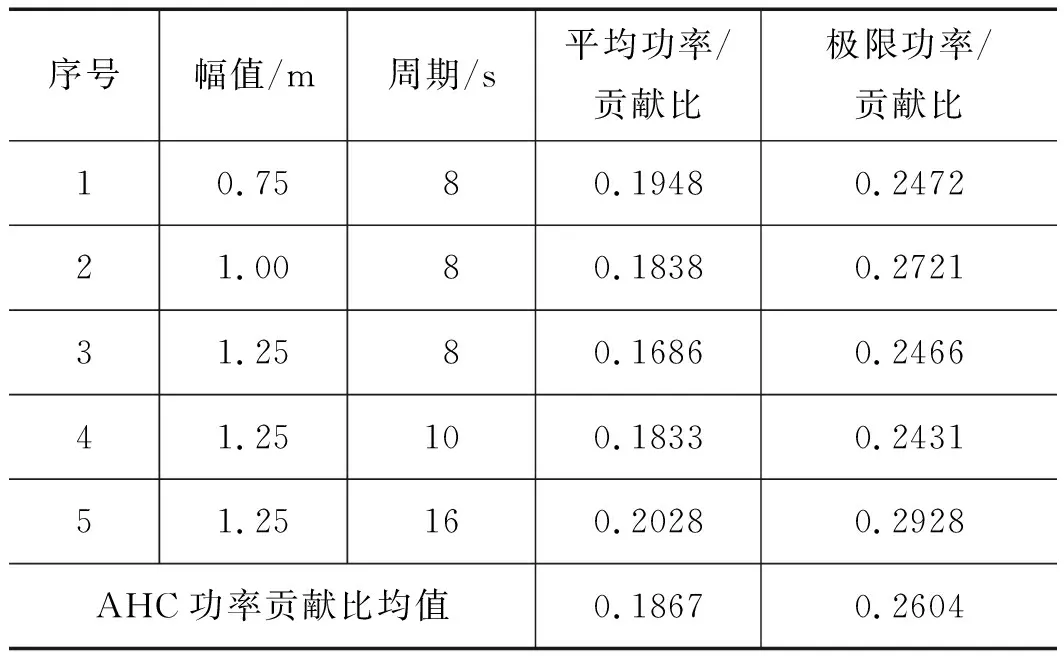
表4 满载试验AHC的功率贡献比
由表4可知,当运动周期一定时,随着运动幅值的增大,AHC的平均功率贡献比逐渐变小,即PHC的贡献在逐渐变大。当运动幅值一定时,随着运动周期的增大,AHC的平均功率贡献比逐步变大,即PHC的贡献在逐渐变小。满载时,当运动幅值、周期变化,AHC的平均功率贡献比从0.1686到0.2028变化,均值为0.1867,PHC平均功率的贡献为:1-0.1867=0.8133。
AHC的极限功率贡献比从0.2431到0.2928变化,均值为0.2604,PHC极限功率的贡献为:1-0.2604=0.7396。由于极限功率出现的随机性与偶然性较大,因此,其变化规律不能客观表征系统功率的变化趋势,但其表征了系统装机功率的范围。
因此,半主动波浪补偿系统,总负载能耗中约25%为实际消耗的能量,较主动补偿系统节能75%。
3 结论
通过试验测试了半主动波浪补偿系统的补偿控制精度与能耗,研究了运动参量变化对补偿控制精度及能耗的影响规律,得到如下结论:
(1) 轻载和满载试验结果表明,运动幅值、周期按照典型信号变化时,位移补偿精度均在92.65%以上,补偿精度变化均控制在2.59%以内,并且随着负载、运动幅值的增加及运动周期的降低,补偿控制精度逐渐提升。系统设计时应配置液压系统参数与海况条件相匹配;
(2) 满载试验表明,在运动周期不变、运动幅值增加条件下,其功率明显上升,主动补偿平均功率最大上升幅度44.29%,极限功率最大上升幅度66.3%;在运动幅值不变、运动周期增加条件下,其功率明显下降,主动补偿平均功率最大下降幅度39.87%,极限功率最大下降幅度40.78%。主动补偿功率受系统工况的变化影响很大,是功率波动的主要因素。使用中应尽量避免极限功率的大幅波动,降低对船舶电力系统的扰动;
(3) 半主动波浪补偿系统负载功率由主动补偿系统功率和被动补偿系统功率组成,使用中系统的能耗主要是主动补偿系统。满载时,主动补偿系统的平均功率贡献比均值为0.1867,极限功率贡献比均值为0.2604,因此,半主动波浪补偿系统,总负载能耗中约25%为实际消耗的能量,该参数可作为系统装机功率选定的重要依据。
