基于BIM与机器视觉技术结合的建筑施工危险区域入侵预警研究
2020-05-21吕山可张雨果赵楚楠何华刚
王 伟,吕山可,张雨果,赵楚楠,何华刚
(中国地质大学(武汉)工程学院,湖北 武汉 430074)
建筑施工过程中施工队伍人员及工种构成复杂,场地空间有限,且具有施工机械与设备众多、交叉作业现象突出、施工周期长、作业环境复杂多变等特点,使得建筑施工成为当前高风险行业之一[1]。要有效提高施工现场危险区域的管理,需要从两方面入手:一是全面识别施工现场容易造成严重后果的危险区域,并对危险区域进行分级管控;二是结合信息化技术,对施工人员入侵危险区域的行为进行实时预警,及时发现并处理。国内外学者在这两方面都做了相应的研究。在建筑施工现场危险区域识别方面,郭红领等[2]确定了不安全区域的划分规则,将施工现场划分为坠落区、碰撞区及特殊岗位;赵挺生等[3]提出了危险区域分级管理理论,构建了危险水平评价技术;华莹等[4]将高层建筑施工现场划分为土方开挖区等18个危险区域;翟越等[5]利用BIM技术构建了三维数字化安全管理平台,分析了建筑施工现场危险区域划分及安全监控等问题;Li等[6]通过实时定位系统采集施工人员位置信息并与施工现场历史事故轨迹进行对比,实现了施工现场危险区域的自动分类;Kim等[7]采用BIM及实时定位技术,建立了实时危险区域自动识别模型,对施工人员路径进行潜在危险区域的识别。在入侵危险区域预警方面,Li等[8]构建了主动安全管理系统,该系统能实时地对施工人员入侵塔吊等危险区域的行为发出预警;高寒等[9]利用移动目标检测算法,实现了对基坑施工现场施工人员入侵基坑、洞口等危险区域的实时监控。此外,也有一些研究人员利用UWB定位技术[10-12]、实时位置传感定位技术[13-14]等定位技术,有效地实现了建筑施工现场人员定位与预警。
以上关于危险区域划分的研究大多集中在建筑施工现场危险区域的划分,少有针对各类危险区域提出的适当区域风险分级方法。同时,在危险区域入侵预警方面,大多研究都是利用RFID、UWB等定位技术获取人和机械的位置信息,少有利用机器视觉技术来实时监控工人入侵危险区域的研究。因此,本文基于建筑施工现场实际,通过BIM平台展示施工现场危险区域及其分级,并利用机器视觉定位技术实时监控,获取施工人员及危险区域位置信息,提出了集成BIM与机器视觉技术的危险区域入侵预警模型,通过整合相关信息,实现对不同危险区域入侵行为全面、准确的识别。
1 BIM技术和机器视觉技术
建筑信息模型(Building Information Model,BIM)技术于2002年由Autodesk公司提出,其功能可服务于建筑工程全生命周期,因其可视化、协调性等特点在国内外建筑业受到了广泛的认可和应用。经过国内外专家学者的不断拓展,该技术在建筑施工[5,7,10]、人员疏散[15]等安全领域也有较多的应用。
随着人工智能的兴起,机器视觉技术也获得了较大的发展。该技术主要通过采集现场视频数据,利用ResNet[16]、R-CNN[17]等机器视觉算法获取施工现场坐标信息,从而实现施工现场人员的定位。机器视觉技术既能在施工现场原有视频监控的基础上进行拓展,减少安装成本、方便维护,在监测过程中也无需与观测对象接触,减少了影响被观测者正常工作的可能性,安全可靠。
2 危险区域类型及其分级
2. 1 危险区域类型
通过统计近些年我国建筑行业事故情况发现,我国建筑行业2018年发生事故数及伤亡人数仍呈上升趋势,较大及以上事故次数仍然较多,安全形势依然严峻。因此,在对建筑施工现场危险区域进行划分时须重点针对常见的以及容易造成重大人员伤亡事故类型所涉及的区域。
此外,建筑施工现场还存在动火作业等其他危险作业类型,极易造成人员伤亡,有必要根据相关要求界定其危险区域。本文在郭红领等[2]、刘文平[10]研究的基础上,综合考虑建筑施工现场的实际情况,将建筑施工现场危险区域类型划分为高处坠落区、物体打击区、坍塌区、起重伤害区、机械碰撞区和其他作业危害区,并确定了其危险区域边界。建筑施工现场危险区域类型及其划分规则见表1。根据表1的划分规则,某建筑施工现场危险区域及其BIM展示见图1。
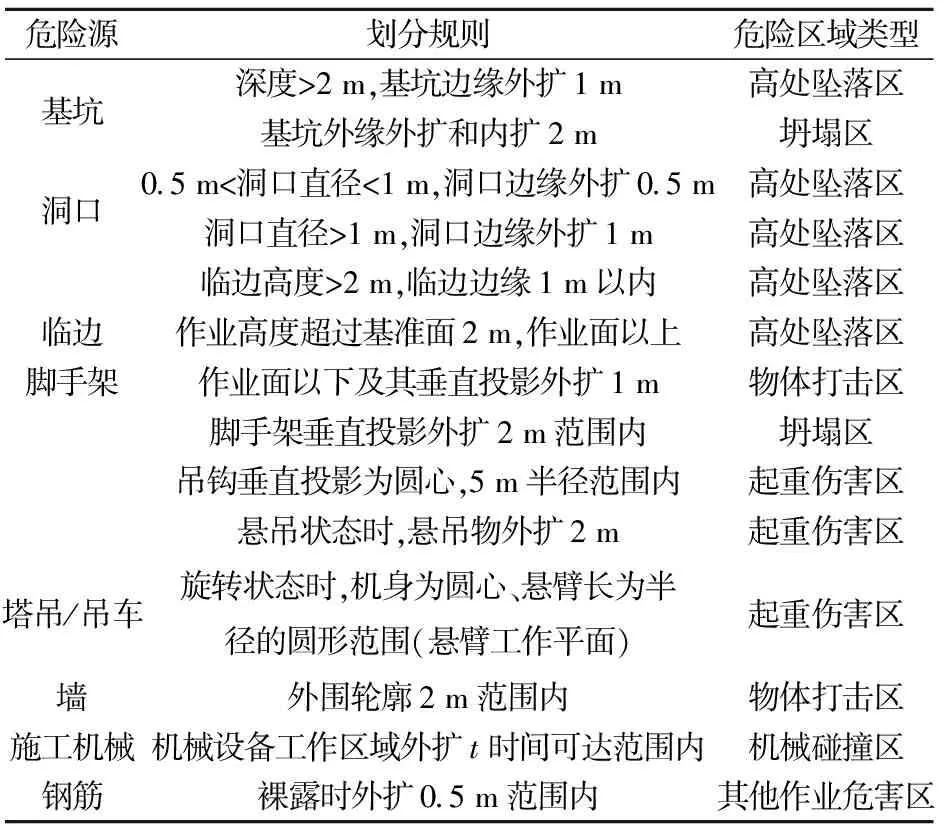
表1 建筑施工现场危险区域类型及其划分规则

图1 某建筑施工现场危险区域及其BIM展示Fig.1 Hazardous area of a construction site and its BIM display
2. 2 危险区域分级
建筑施工场地狭窄,危险区域众多,导致各作业环境下难免存在其他作业人员入侵的情形;此外,一些危险区域如临边加装了防护栏等安全防护措施,使得该区域的风险等级大大降低。因此,需根据建筑施工现场的实际情况,对危险区域进行分级管理,本文将建筑施工现场危险区域分为三级:警戒区、危险区和核心危险区[3]。
由于不同建筑施工项目对项目内部的安全要求不同,因此在对不同建筑施工现场的危险区域进行分级时需综合考虑危险区域自身的危险特性、工作人员的实时位置、建筑工程项目规模和现场复杂程度等因素。考虑到建筑施工现场入侵危险源与人员暴露在危险环境中的频繁程度无关,且不同建筑工程项目对风险的预期目标不一样,本文引入了改进的LEC风险评价方法对建筑施工现场危险区域进行分级,其分级方法如下式:
D=L·E·C·R
(1)
式中:D为危险区域风险评价分数(风险值);L为危险区域内固有危险源引发事故的可能性;C为危险区域发生事故的严重程度;E为人员进入危险区域后受到伤害的可能性;R为修正系数,与工程项目规模、现场复杂程度以及风险承受能力相关。
公式(1)中L、E、C分级及其取值,可由工程项目管理人员确定或参照LEC风险评价方法标准确定。利用公式(1)确定D值后,比较D值与工程项目风险各等级区间风险值Dm,即可确定风险等级,其中Dm由工程项目管理人员根据工程项目设计风险等级及其风险承受能力来确定。

图2 挖掘机土方作业危险区域分级Fig.2 Classification of hazardous area for excavator earthwork
为了清晰地表达建筑施工现场危险区域的划分方法,本文在不考虑风险耦合的情况下,以某一挖掘机土方作业为例对其危险区域进行了划分并分级,见图2。该图显示了挖掘机及自动载土车进行土方作业时的平面危险区域。首先,根据表1确定了作业过程t时间内机械可达位置及视野盲区为该作业的危险区域;其次,根据公式(1)计算各危险区域的风险值D,并比较D值与该工程项目各危险区域的风险承受能力Dm,从而确定以挖掘机臂长为半径的圆形区域、载土车区域及前后行进2 m区域为核心危险区(红色区域),挖掘机及载土车土方作业时2 s能够到达的区域及其视野盲区为危险区(桔黄色区域),其他区域为警戒区(绿色区域)。
3 危险区域BIM表达
要实现BIM环境下危险区域的表达,既要构建建筑施工现场的三维模型,还要根据工程项目安全的需求,构建危险区域IFC表达内容,以便建设相关方添加危险区域信息。此外,工程项目管理人员需要根据安全检查信息,定期更新BIM模型,从而保证建筑施工现场危险区域表达的准确性、时效性。
3.1 危险区域的IFC表达
在BIM环境中,能表达建筑施工危险区域信息的IFC(industry foundation classes)实体存在于施工管理领域、共享的设备元素(如塔吊、脚手架等)、建筑施工领域(临边、洞口等)三个层次中。工程项目管理人员可以通过IFC架构中IfcProduct(抽象实体)下的IfcSpatial Structure Element(空间结构实体)和IfcElement(实体)拓展危险区域IFC框架,使得危险区域依附在建筑物或机械设备等元素上。图3为建筑施工现场危险区域IFC拓展框架,该框架一是通过主线IfcElement新增危险区域实体IfcHazardous Area Element,危险区域的子实体包括IfcHigh Drop Zone(高处坠落区)、IfcObject Strike Zone(物体打击区)、IfcCollape Zone(坍塌区)、IfcLifting Injury Zone(起重伤害区)、IfcMechanical Collision Zone(机械伤害区)、IfcOperationa hazard Zone(作业危害区)等,同时通过原有实体IfcProduct Representation(几何属性实体)和IfcRepresentation(区域形状表达方法)拓展危险区域的几何信息实体(IfcHazardous Area Soild)和IfcParameterized Profile Def(参数化实体),包括IfcRectangle Profile Def(矩形)、IfcCizcle Profile Def(圆)、IfcEllipse Profile Def(椭圆)等;二是通过主线Spatial Structure Element(空间结构实体),新增IfcHazardous Area Space(危险区域空间信息),并发展平面位置实体IfcLocal Placement(包括复合线IfcPoly Line和裁剪线IfcTrimmed Curve)和高度实体IfcZone High Level(包括枚举类型IfcHazardous Area Type、边界长度IfcLength Measure、空间边界关系实体IfcRel Space Boundary、空间覆盖关系实体IfcRel Covers Spaces等内容)。
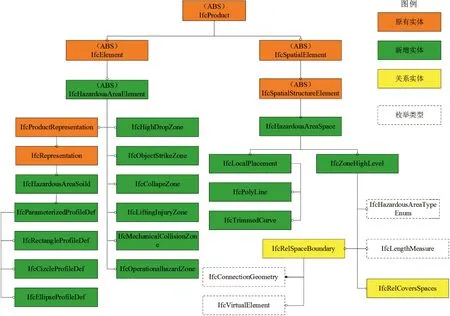
图3 建筑施工现场危险区域IFC拓展框架Fig.3 Framework for IFC extension model of hazardous area in the construction site
通过以上方法对危险区域IFC内容拓展,从而实现BIM环境中表示映射在地面上的危险区域在整个施工场地内的位置、空间信息以及映射在内部建筑物周边的危险区域的位置、空间信息等内容的IFC表达。
3. 2 施工环境的动态表达
在BIM环境中,工程项目管理人员可以将建筑施工现场的施工计划导入到BIM平台,实现建筑施工现场环境的动态表达。因此,为了更加准确地表达建筑施工现场环境,工程项目管理人员可以将每天在建筑施工现场辨识的危险源信息、机械数量以及施工计划、施工人员类型及数量等信息导入BIM平台,以实现建筑施工现场危险源信息和危险区域的动态表达,同时根据BIM平台中相关信息的表达,可视化建筑施工过程,重现关键施工流程,突出关键危险区域的安全风险,管理建筑施工现场的危险区域以及危险区域与其载体的关系。
4 危险区域定位和工人信息识别
在建筑施工现场中一般包含两类危险区域:一类是静态的危险区域,如基坑周边及临边等;另一类是动态的危险区域,包括卡车、塔吊等施工机械,在其作业或移动过程中产生的危险区域。针对这两类危险区域需要实现在建筑施工现场BIM平台内的定位,同时需要对施工区域内的人员信息进行采集与分析,有效判别施工人员的工种类别、位置信息,辅助BIM平台建立施工员入侵危险区域的预警机制。
危险区域定位和工人信息识别技术既要考虑定位精度、范围、抗干扰能力、穿透障碍物能力和可拓展性,还需要考虑项目部的其他需求和经费承担能力。为此,本文提出了一种基于机器视觉定位技术的危险区域定位和工人信息识别方法,以满足建筑施工现场危险区域施工人员高效精准定位的需求。
4. 1 危险区域定位
施工现场通过架设高点固定摄像机实施监测,考虑到建筑施工场地大、现场复杂等特点,现场应根据需要布置多个高点摄像机,并尽量设置在开阔位置,避免遮挡等情况,且保证摄像机成像无干扰、照度应达到0.02 lux、视距不小于50 m。采用张氏标定法对高点摄像机参数进行标定,通过参照物将建筑施工现场BIM模型中的位置坐标与摄像机视场形成的高精度坐标映射,再将标定后的高点摄像机图像进行危险区域标注,实现对危险区域的定位。其中,针对静态危险区域,根据不同类型的危险区域边界及其区域等级划分规则,对危险区域的位置及边界进行测量,获取其坐标数据;针对动态危险区域,根据作业规律,获取作业机械等的运动区域范围表达,通过标记得出各危险区域的位置及范围,并根据表1对危险区域及其等级进行划分。
4. 2 工人信息识别与定位
工人信息识别包括对工人工种类型的判别和对工人在施工现场的定位两部分任务,需要在输入视频连续序列中找到工人目标,并识别工人工种信息以及对工人运动轨迹进行准确监测。本文采用基于机器视觉技术的工人信息识别与定位方法,具体处理过程见图4。首先采用Open Pose人体姿态估计算法对视频图像进行预处理,并对视频图像中的目标及其骨架进行检测,提取骨骼关节点数据;然后根据关节点分割目标图像,得到人体头部区域和胸部区域,并基于ResNet残差神经网络识别施工人员安全帽佩戴及工作服穿着情况,从而判断工人工种信息;再后通过KCF(Kernel Correlation Filter,核相关滤波算法)跟踪选定目标,基于目标先验信息,在视频序列中持续获取目标运动状态,得出该时段该目标在摄像机视场内的运动轨迹;最后通过BIM模型中的坐标数据,采用前述的危险区域定位的标定方法对目标人员的位置进行标定,并结合目标的运动轨迹形成工人在施工现场的运动轨迹及其坐标序列信息。
5 危险区域入侵预警模型及其应用
5. 1 危险区域入侵预警模型的构建
先将建筑工程项目施工计划、危险区域表达、人员和机械信息、安全检查信息等内容导入BIM模型中,构建建筑施工现场BIM模拟平台;然后通过API接口将静态危险区域、施工人员和机械设备的实时坐标信息传输到BIM平台上;最后系统通过比较危险区域与施工人员的位置信息,实现施工人员入侵危险区域的预警,其预警流程见图5。
在BIM模型中确定坐标原点后,危险区域和施工人员工作区域的坐标区域可分别利用下式来表示:
Y=(x1,y1,z1),(x1,y1,z1)∈R3
(2)

图4 基于机器视觉定位技术的工人工种识别与定位示意图Fig.4 Schematic diagram of job identification and personnel positioning based on machine vision positioning technology

图5 建筑施工现场危险区域入侵预警流程Fig.5 Process of early warning of intrusion into hazardous area in construction site

(3)

当施工人员进入危险区域时,预警系统通过下式(4)判断是否需要预警:

(4)
其中,X表示施工人员三维坐标,当X∈Y时,表示施工人员进入危险区域,即f(X)=1,系统需通过下式(5)继续判断是否需要预警;反之f(X)=0,系统无需预警。

(5)
其中,t表示施工人员进入危险区域的时间;t′表示作业人员在该级别危险区域允许的入侵时间,其由工程项目管理人员根据危险区域等级取值。当工作区域与危险区域不交叉的施工人员进入危险区域,且在区域预警时间t′前未离开危险区域时,g(X,t)=1,系统发出预警;反之,g(X,t)=0,系统不预警。
5. 2 实例分析
本文以湖北某建筑施工现场为研究对象,构建了该施工现场某一时段的BIM模型,并通过在施工现场架设高点摄像机获取了某一施工人员在30 min内的作业轨迹。该建筑施工现场危险区域BIM模型和施工人员作业轨迹俯视图,详见图6。该施工人员的主要作业内容为脚手架的拼装,其工作区域与塔吊吊装作业无交叉,工程项目要求非危险区域作业人员在核心危险区、危险区、警戒区允许的入侵时间分别为10 s、15 s、40 s。

图6 某建筑施工现场危险区域施工人员入侵行为的预警示例Fig.6 Early warning example of intrusion behavior at a construction site
根据该施工人员的运动轨迹,选出6个关键位置节点,其中位置1、2、6属于其工作区域Y',位置3、5属于危险区域Y,位置4属于其他人员作业区域,其与施工人员工作区域Y'、危险区域Y均无联系。根据视频轨迹发现:该施工人员处于位置3、5时入侵危险区和核心危险区的入侵时间都超过了警戒值,因此通过该预警模型对其分别发出了黄色预警和红色预警;当该施工人员处于位置1、2、4、6时则不发出预警。
6 结 语
本文利用LEC评价法、BIM技术和机器视觉技术,构建了建筑施工现场危险区域的实时预警模型,并结合工程实例对该预警模型进行了具体应用。结果表明:该预警方法既能根据工程项目需求对施工人员入侵危险区域的行为进行预警,也能统计工人入侵危险区域的次数,以便有针对性地对工人开展教育和培训,提高施工人员的安全意识,降低施工人员入侵危险区域行为的发生,从而提高施工现场的安全管理水平。