植保无人机喷施雾滴沉积特性的荧光示踪分析
2020-05-19张瑞瑞李龙龙陈立平伊铜川宋佳星
张瑞瑞,李龙龙,文 瑶,陈立平,唐 青,伊铜川,宋佳星
(1.北京农业智能装备技术研究中心,北京100097;2.国家农业智能装备工程技术研究中心,北京100097;
3.国家农业航空应用技术国际联合研究中心,北京100097;4.农机北斗导航与智能测控北京市工程实验室,北京100097)
0 引 言
随着农业航空技术不断应用发展,植保无人机因作业效率高、灵活性高的作业模式,在农业植保领域得到广泛的应用[1-4]。无人机喷施农药过程中,雾滴飘移会造成药液浪费及环境污染问题,针对无人机的作业质量和雾滴沉积效果研究逐渐增多[5-7],目前考虑影响雾滴沉积的主要因素包括喷洒系统参数(喷头类型、喷雾压力、喷头安装角度)、气象参数、飞行参数、旋翼风场等[8-15]。将影响雾滴沉积效果的因素进行综合分析,优化喷雾系统和飞行参数是当前的研究重点。施药雾滴沉积效果影响方面,主要通过风洞试验[16-18]、模拟仿真[19-22]和大田试验等方法进行,其中,大田试验可通过实际喷雾直接获得沉积数据,因而具有重要现实意义,诸多学者开展了相关研究,邱白晶等[23]研究了CD-10型无人机飞行高度、速度对小麦沉积均匀性的影响及两因素交互作用关系,构建了相应的关系模型。秦维彩等[24]探究了N-3型无人机施药雾滴在生长中后期玉米冠层内的沉积分布,筛选出适宜高秆作物喷雾使用的喷洒参数。Chen等[25]利用无线风速传感测量系统测定了了无人机旋翼下洗风场三维风速,总结出无人机下洗风场对喷施雾滴在水稻冠层的沉积分布规律。王昌陵等[26]以雾滴沉积变异系数和均方根误差为指标,对比4种典型国产植保无人机施药雾滴在小麦冠层的沉积分布。喷雾沉积效果检测方面,当前主要有示踪剂法、水敏纸法、传感器检测法等。示踪剂法利用荧光/紫外可见光分光光度计可准确测定沉积量[27],常用于量化对比不同施药方式或施药参数下雾滴沉积或飘移效果;水敏纸法可通过扫描设备和图像分析软件实时获取雾滴沉积密度和覆盖率,也可用于估测雾滴谱参数[28];随着电子信息和传感技术的发展,基于光电的检测手段应运而生,Kesterson等[29]研发了一种基于电阻传感阵列的雾滴采集系统,可准确测定雾滴沉积量和液滴尺寸。上述方法多采用离散布样方式,相邻样点间隔一定距离[30],而植保无人机飞行中旋翼高速旋转,下洗气流涡线与机身作用发生扭曲,雾滴运动轨迹复杂多变,药液沉积的连续分布难以掌握。
本文采用3WQF-80-10型植保无人机作为试验机型,搭载了高精度的北斗导航系统开展田间喷雾试验。利用水敏纸和基于光谱示踪方式的航空施药雾滴沉积特性检测系统[31-32]同步获取不同飞行参数下无人机施药喷雾雾滴沉积结果,分析3WQF-80-10型植保无人机施药雾滴沉积分布特性,通过对比连续和离散采样方式,评估航空施药雾滴沉积特性检测系统对雾滴沉积的检测效果与适用性,以期为该系统在植保无人机喷雾质量检测中的应用提供理论基础。
1 航空施药雾滴运动沉积规律分析
航空施药采用空中作业方式,在作业过程中机体与环境风相互作用会产生流场涡结构,其中,固定翼飞机尾涡尺度较大,呈准二维形态,机翼产生的成对平行尾涡能够保持较长时间,流动结构的复杂性较低,施药雾滴在地面上可平滑沉积分布;无人机旋翼旋转速度相对较快,当翼尖涡形成并向下方运动时,其整体形态在半个周期后受另一旋翼破坏,同时翼尖涡结构还受到机身和尾桨气流的影响,最终形成复杂的非定常流动[33],施药雾滴受气流场作用空间内沉积分布差异较大。
无人机施药过程中,雾滴在非定常流动中的运动轨迹主要通过CFD仿真模拟进行分析,利用拉格朗日坐标系下颗粒作用力微分方程(BBO方程)求解雾滴在空气中的受力过程[34]。求解BBO方程为
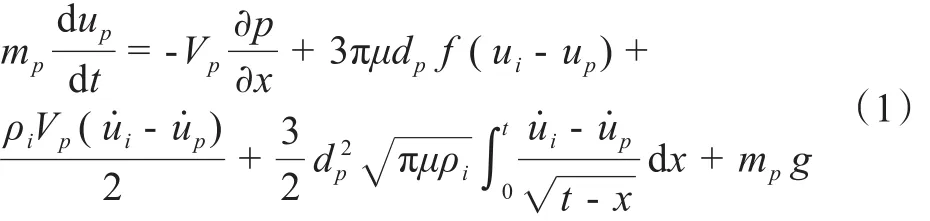
分析可知,在旋翼下洗复杂流场中,粒子速度在同一时刻下的不同空间位置,以及在同一空间位置上的不同时刻,均在发生随机脉动,这是湍流的性质决定的,流体速度随时间和空间发生的变化量称为时空脉动量。从BBO方程中可以看出,附加质量力项、Basset力项和气动阻力项均会直接影响离散相颗粒运动速度up,粒子运动速度不仅受质量、密度、直径等自身特性参数的影响,且气流脉动也可导致雾滴速度发生变化。
进一步利用雾滴颗粒力平衡方程在离散时间步长上逐步积分求解雾滴运动轨迹,计算分析雾滴在其运动轨迹上各位置的运动速度,求解方程为

上述方程表明,离散相颗粒运动速度up的改变会导致粒子运动轨迹发生变化,粒子运动速度除了受雾滴自身特性的影响外,还受气流脉动影响,综合粒子速度和粒子运动轨迹求解方程,进一步推导可知,在复杂流场中,离散相颗粒运动速度up时空脉动量较大,进而影响方程离散相雾滴速度脉动项及其积分获得的运动轨迹,最终直接决定雾滴的沉降区域和位置。而植保无人机下洗气流为非定常旋转流场,气流脉动复杂多变,导致雾滴沉积区域难以预测,采用传统的离散采样的雾滴沉积测量方式(雾滴接收装置间隔排布),难以准确呈现雾滴地面沉积分布的完整信息,尤其在研究旋翼下洗气流对雾滴沉积分布影响方面,可能会遗漏特定位置雾滴受气流作用的关键信息,干扰研究结果。为解决上述问题,本研究采用了基于光谱示踪技术的航空施药雾滴沉积特性检测系统[31-32],捕获雾滴在施药区域内连续沉积分布曲线,以获取无人机喷雾过程更为丰富的沉积分布信息,以期指导植保无人机喷雾系统和气动力布局优化,提高雾滴沉积质量。
2 材料与方法
2.1 试验设备与方法
2.1.1 仪器设备
飞行平台采用3WQF-80-10型悬浮智能植保无人机(安阳全丰航空植保科技有限公司,河南),其主要性能参数如表1所示,试验作业的飞行速度和高度根据试验组测试要求调整并记录。
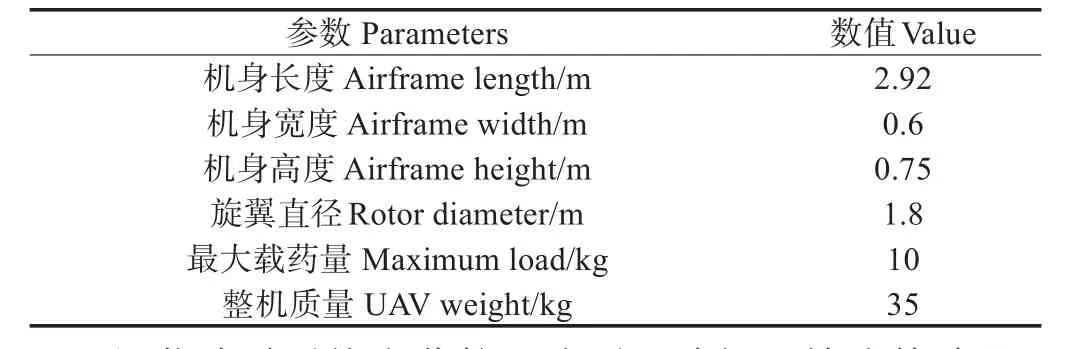
表1 植保无人机主要性能参数Table 1 Performance parameters of plant protection unmanned aerial vehicle
机载喷雾系统由药箱、液泵、喷杆、输液管路和2个离心旋转喷头等构成,喷杆宽1.1 m,离心喷头垂直于飞机中轴线等间距地安装喷杆两端,喷头方向朝下垂直于地面,单个喷头最大流量为1.5 L/min。为精准控制飞行参数,采用BDST-R300-BG型北斗卫星导航定位系统实时获取高精度定位数据,飞控手通过定位数据实时调整飞行姿态,保证植保无人机严格按照试验组设计参数进行喷雾作业。定位系统包括基准站和流动站2个部分,基准站用于接收卫星信号确定地理位置信息和接收差分数据,利用高功率电台将差分信号传输至移动站;移动站安装于待测无人机机身上部,记录作业航线轨迹、飞行高度和飞行速度工况参数。系统的水平静态差分精度为±(2.5+1×10-6D)mm,垂直静态差分精度为±(5+1×10-6D)mm,D指以基准站为中心的方圆直径(mm);移动站双频载波相位差分技术(real-time kinematic,RTK)水平定位精度为±(10+1×10-6D)mm,双频RTK垂直定位精度为±(20+1×10-6D)mm。气象监测系统实时监测和记录试验过程中环境风速、风向及温湿度参数。
2.1.2 试验设计
试验于2018年7月12日在北京市昌平区国家精准农业研究示范基地进行。分别采用荧光示踪法和水敏纸法获取雾滴沉积分布,其中,荧光示踪法采用荧光纸带连续布样方式,水敏纸法采用离散布样方式。雾滴收集装置由铝制支架、荧光纸带、水敏纸等构成。试验区采样点布置如图1所示,箭头指示方向代表植保无人机飞行方向,单次试验中,垂直航线方向设置3个雾滴采集区域,编号分别为1、2、3(采集区1与采集区2间隔3.0 m,采集区2与采集区3间隔1.0 m),采集区内横向各布置1组铝制支架,支架长8 m,距地高度0.5 m。测试前将荧光纸带(长7 m,宽19.3 mm)横向铺展于支架表面,用燕尾夹固定防止测试过程中纸带翻转;靠近纸带一侧位置以0.5 m等间距均匀布置水敏纸卡片(76 mm×26 mm,先正达公司,瑞士),每个采集区布置15张,试验区共计45个水敏纸样本采集点。为便于样品的标识,水敏纸和纸带采用试验组加采集区的方式标记,如试验组1中,采集区1中所得的水敏纸和纸带分别表示为W1-1和P1-1,以此类推。
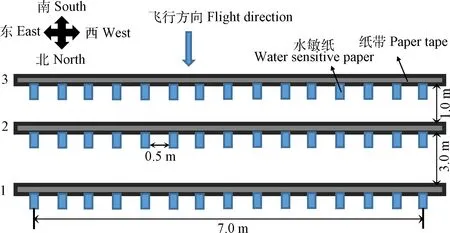
图1 试验采样点布置示意图Fig.1 Schematic diagram of sampling arrangement in the test
质量分数为1.0%的荧光增白剂RQT-C-3(瑞奇特公司,河南)水溶液作为喷雾液,试验中,布置的水敏纸卡片和荧光纸带用于获取施药雾滴沉积分布、覆盖率等关键信息,单次喷洒试验结束后,待水敏纸卡和纸带表面雾滴完全干燥,将其按照序号收集并逐一放入对应的密封袋中,带回实验室待测。
2.1.3 飞行作业参数设置
飞行作业参数是影响雾滴沉积分布的重要因素,已有研究表明,不同类型植保无人机机身构造不一,对作业高度、作业速度等参数要求不同,此外,针对不同作物进行病虫害防治时,作业参数也有特定要求[35]。诸多学者开展了飞行参数对雾滴沉积分布的测试研究[36-38],飞行高度范围为1~9 m,飞行速度范围为1~5 m/s,但由于施药机型、作业环境、施药对象等因素差异,最优的作业参数各异。通过调研发现,当前植保无人机常规作业参数为飞行速度<8 m/s,距作物冠层相对飞行高度为1.5~5 m[39],相关研究表明,无人机在低空低速条件下作业有较好的雾滴覆盖,特别是旋翼产生的下旋气流,使雾滴直接沉积到作物叶片正反面[40],但飞行速度过低,作业效率难以保障,相对飞行高度在1 m以下时,则可能威胁无人机作业安全。综上考虑,结合所用无人机生产厂家推荐作业参数,设置喷雾作业参数,将飞行速度设置为3个水平,2 m/s为低速范围,3 m/s为中速范围,4 m/s以上为高速范围,距离地面绝对飞行高度设置为3、6、9 m,其中对于9 m作业高度设置,主要考虑本文设计的荧光示踪检测方法为一种新的检测手段,尚处于试验阶段,常规作业条件下检测效果比较理想,当喷雾条件恶劣或雾滴沉积较少时,该系统能否有效检测尚不可知,为此设计9 m作业高度,探索在雾滴沉积较少的情况下该系统的适用性。将飞行高度和飞行速度组合进行6次喷洒试验(表2),每次试验分别获得3条荧光纸带样品和3组水敏纸样品,无人机喷雾系统单喷头流量设置为1.0 L/min。
2.2 数据获取与处理
2.2.1 气象和飞行作业参数
试验过程中,在空中垂直距离地面2 m处架设一农用气象站(IWS-M400型,宇佳科技有限公司),通过气象监测系统实时监测记录试验过程中环境风速、风向和温湿度变化,根据统计数据获得各试验组环境风速、温湿度平均值。表2为机载北斗定位系统获取的无人机喷施作业参数(平均飞行高度、飞行速度)及其各试验组对应的气象参数。

表2 试验组飞行和环境参数Table 2 Flight and environmental parameters in the test
2.2.2 雾滴沉积检测-水敏纸法
利用TSN450型手持扫描仪(天彩电子(深圳)有限公司,分辨率像素为1200×1200)对水敏纸样品逐一进行扫描,通过图像处理软件iDAS[41]获取水敏纸表面雾滴沉积参数,计算分析不同飞行参数下水敏纸样品雾滴沉积覆盖率(%)。雾滴覆盖率为雾滴的浸染面积和水敏试纸采样面积比值。试验中各个采集点之间雾滴沉积均匀性通过变异系数CV评估,计算公式如下:
式中S为每组采集样本覆盖率的标准差,%;Xˉ为平均覆盖率,%;Xi为每个采集样本的雾滴覆盖率,%;n为采集样本数。CV值越小,雾滴沉积分布越均匀。
2.2.3 雾滴沉积检测-荧光示踪法
纸带样品经航空施药雾滴沉积检测系统[32]扫描处理,获得整条纸带表面荧光介质光谱连续分布特征曲线。该系统由微型光谱仪、步进电机、紫外光源和光电限位器等部件构成。纸带表面的荧光示踪剂RQT-C-3在365 nm波长的紫外光源激励照射下产生分子荧光,荧光光强信息通过微型光谱仪的光线探头转化成数字信号,最终通过USB串口传输和存储于计算机。采集过程中,步进电机驱动整条纸带使其完全被扫描,当单条纸带采集完毕后,光电限位器响应返回系统发送停止光谱数据采集的指令,步进电机停止动作,系统采集时间间隔设为0.5 s,步进电机转速为120 r/min。
6组试验中,共获得18条纸带,各纸带的所获样本点数基本一致,纸带光谱点数为102或103组。利用公式(3)和(4)计算各试验组雾滴覆盖率变异系数。
3 结果与分析
图2为各试验组在采集区2内荧光示踪法和水敏纸法测得的雾滴沉积覆盖率分布,结果表明,雾滴主要沉积在1~5 m的布样区间内,从图中观察可知,作业参数可影响雾滴沉积分布,导致雾滴沉积曲线呈不同的分布态势,当速度为2 m/s,作业高度为3 m时(图2a),沉积曲线波形变化明显,随着高度的增大(作业高度为6 m和9 m,对应试验2和试验3,图2b和2c),分布曲线呈逐渐平缓的趋势,主要原因是高度增大,喷头距离靶标的距离增大,从喷头释放的雾滴在下洗气流场作用下在靶标上部空间分散运动,导致沉降到靶标的雾滴沉积相对均匀,但雾滴覆盖率较低。
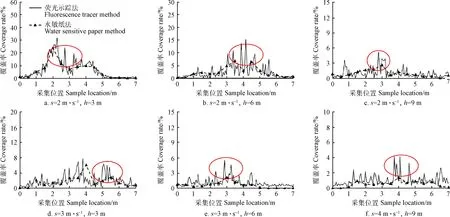
图2 各试验组在采集区2测得沉积结果Fig.2 Deposition results of the tests in No.2 collecting area
为进一步分析荧光示踪法的实际应用性能,选取沉积曲线变化最为明显的试验1作为分析对象(图2a),与水敏纸法测定的雾滴沉积结果进行对比,结果显示,荧光示踪法与水敏纸法所得雾滴沉积分布曲线整体趋于一致,但前者覆盖率曲线波峰高于后者,荧光示踪法所得覆盖率最高为31.92%,所处布样位置为2.25 m;水敏纸法获得覆盖率曲线最高点在2.00 m处,为23.85%。同时,相比于水敏纸法的离散布样方式,采用连续测量方式的荧光示踪法获得覆盖率在不同采集位置出现多个波动峰(图2实线圆圈标注),说明无人直升机下洗风场作用导致垂直飞行方向各位置雾滴沉积空间差异较大;在试验6中(图2f),飞行速度和飞行高度均高于其他5组,雾滴覆盖率较低,水敏纸法所得分布曲线平稳,而荧光示踪法检测得到的雾滴覆盖率曲线展向出现多个明显峰段。将2种方法所得数据进一步处理,取荧光纸带对应水敏纸布样位置的覆盖率数据,将其与水敏纸测得结果进行拟合分析和单因素方差检验(α=0.05),所得拟合优度(R2)和显著性水平如表3所示,分析可知,2种检测方式所得雾滴覆盖率结果相关性较好,6组试验平均拟合优度分别为0.95、0.92、0.88、0.92、0.96和0.94,试验1~试验5条件下,2种方法所得雾滴覆盖率均无显著性差异(P均高于0.05),仅试验6(飞行速度4 m/s,飞行高度9 m)条件下有显著性差异(P=0.02),说明植保无人机常规作业条件下,基于荧光示踪的检测方法能够表征雾滴沉积覆盖率参数。
表4为2种检测方法测得的雾滴沉积分布结果,从表中可以看出,荧光示踪法计算的雾滴覆盖均值均高于水敏纸法,主要原因是水敏纸法采用离散布样方式,植保无人机旋翼涡流致使雾滴无序运动,下洗气流作用下部分雾滴为集中沉降到未布水敏纸位置,出现图2中所示的峰段。无人机飞行速度和飞行高度分别为3 m/s和3 m时,荧光示踪法相对水敏纸法变化率最低,为8.71%;飞行速度为2 m/s时,无人机飞行高度为9 m的平均覆盖率变化为47.58%,明显高于飞行高度为3和6 m时的变化率;当飞行高度一定时(试验组2和试验组5,试验组3和试验组6),雾滴覆盖变化率与飞行速度呈正相关,飞行速度越大,雾滴覆盖率变化值越高,其中飞行速度为4 m/s,高度为9 m时,荧光示踪法相对水敏纸法变化率可达97.77%。综上可知,增大植保无人机飞行速度和飞行高度,水敏纸法离散采样方式所得沉积结果与荧光示踪法连续采样结果偏差越大,可能原因是飞行速度和飞行高度的增大,含能较高的翼尖涡向下运动胁迫细小雾滴非定向沉积,雾滴沉降到非水敏纸采集位置导致偏差增加。当前,植保无人机多采用低容量或超低容量喷雾技术,细小雾滴在旋翼下洗风场的作用下,地面雾滴沉积的空间差异性大,因此,在进行植保无人机下洗风场对雾滴沉积分布影响研究时,应进行连续采样,以获取更多的雾滴空间沉积分布细节。取样区间内变异系数方面,荧光纸带相对水敏纸平均变化率范围为1.67%~29.71%;由于荧光示踪法采用连续取样方式,覆盖率分布曲线在非水敏纸布样位置出现明显的多个峰段,因此取样范围内雾滴覆盖率极差高于水敏纸法测试结果。

表3 水敏纸法和荧光示踪法所得雾滴覆盖率分析Table 3 Analysis of droplet coverage rate obtained by water sensitive paper method and fluorescent tracer method
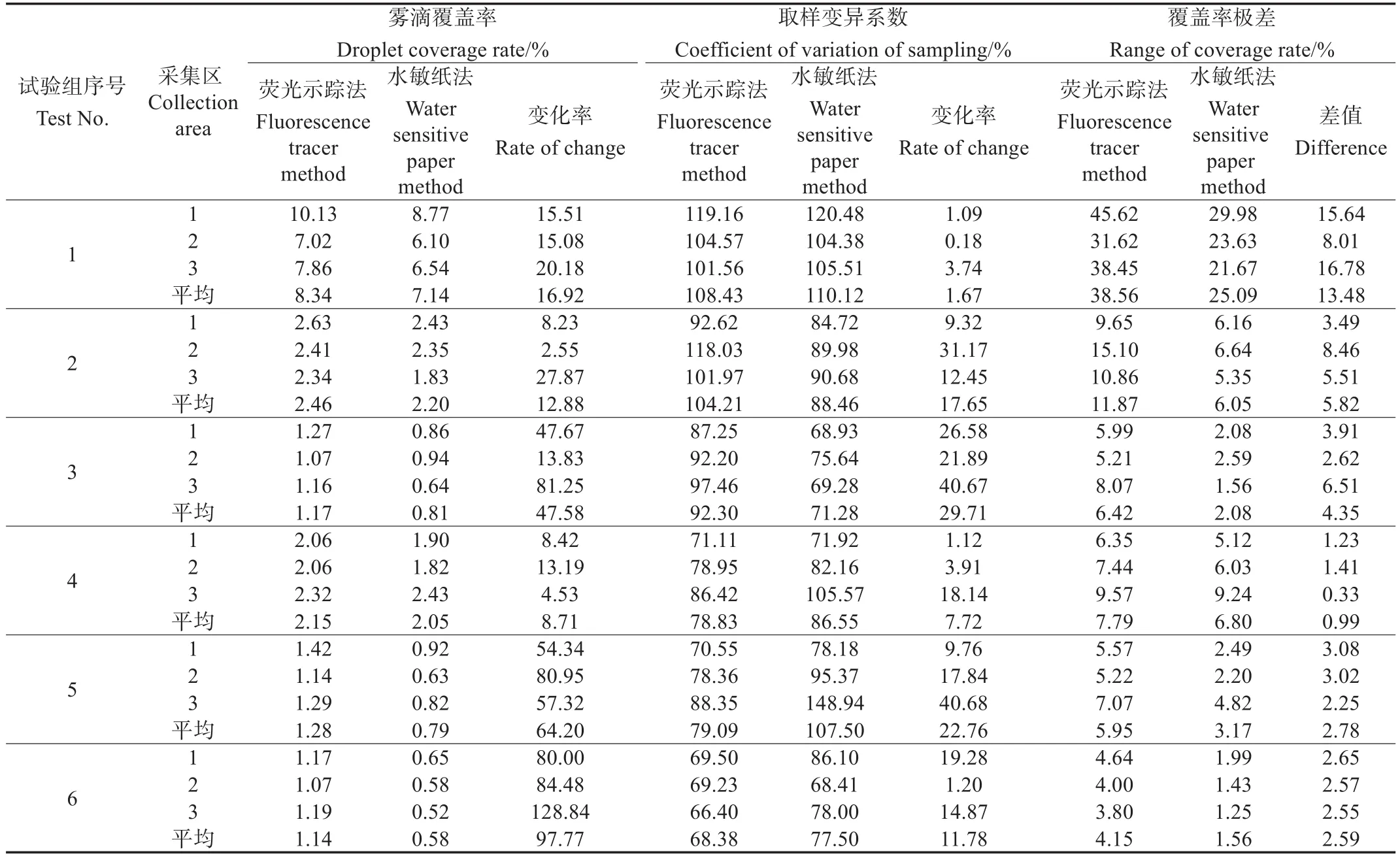
表4 水敏纸和荧光示踪法测定的雾滴沉积结果Table 4 Droplet deposition measured by water sensitive paper method and fluorescent tracer method
图3为不同工况下植保无人机施药雾滴沉积覆盖率,结果显示,在飞行速度2 m/s,飞行高度3 m作业条件下,雾滴沉积覆盖率最高,荧光示踪法和水敏纸法所得结果分别为8.34%和7.14%。随着飞行高度的增大,雾滴沉积覆盖率逐渐降低,飞行速度为2 m/s时,2种测量方式下,飞行高度6 m较3 m时所得覆盖率分别降低了52.4%和63.18%。飞行高度为6 m时,飞行速度3 m/s较2 m/s时的雾滴覆盖率分别降低了47.97%和64.10%,说明增大飞行速度会降低有效沉积到靶标表面的雾滴数量。由于植保无人机下方雾滴受机翼引起的紊流风场及外界风场影响较大,随着飞机作业速度和飞行高度的增大,旋翼下旋气流在垂直于地面方向上的流场随之减弱,同时翼尖涡含能增大,驱使雾滴发生卷扬现象,导致雾滴飘移增大,靶区内的雾滴沉积量相应地减少;另外增大飞行高度相应增加了雾滴在空中的运动距离,容易受到环境风的作用沉降到非靶标施药区域,对于甘蔗、玉米等高杆作物,应综合考虑作业安全和雾滴沉积质量,无人机相对作物冠层高度不宜过低。
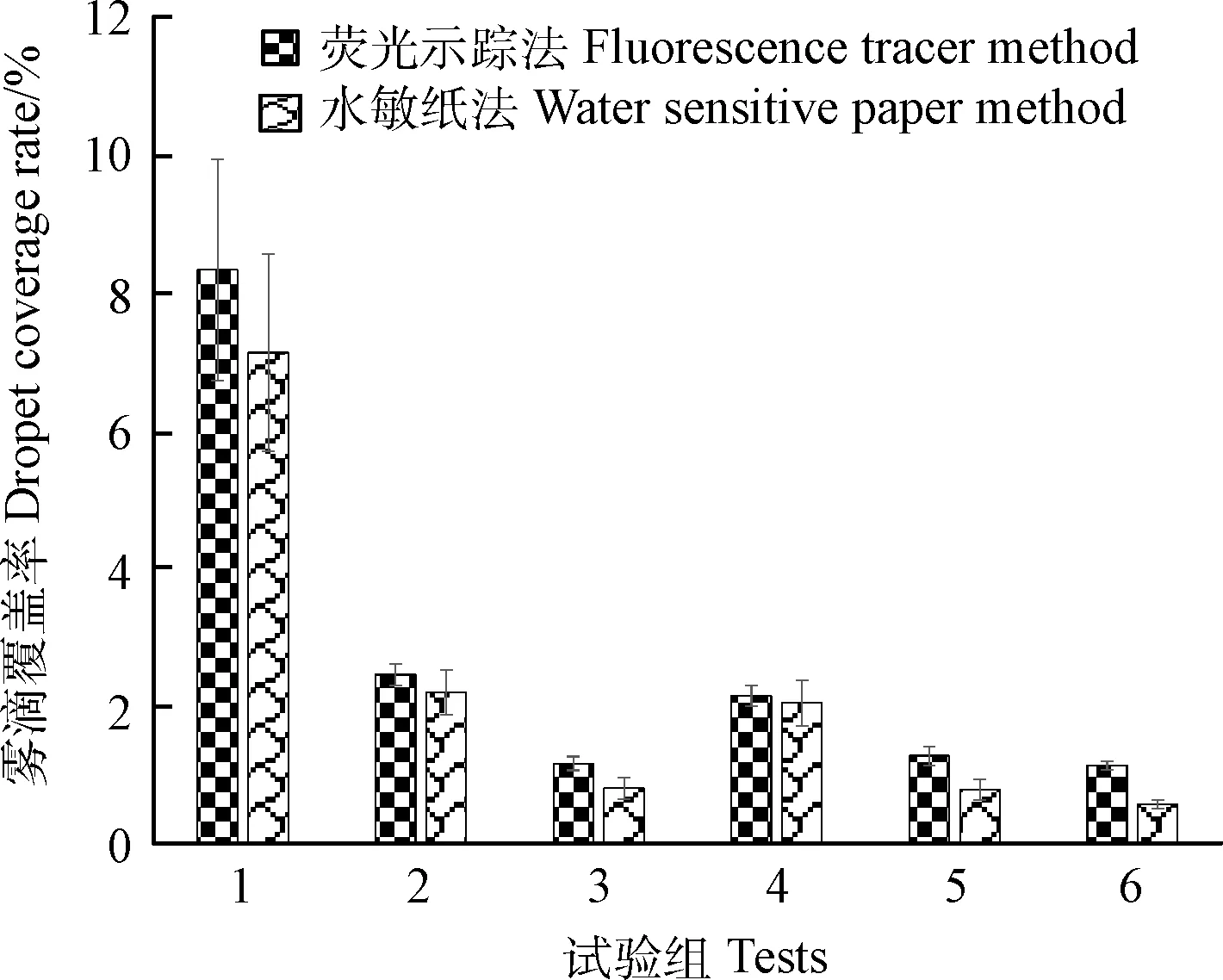
图3 不同工况下雾滴沉积覆盖率Fig.3 Droplet coverage rates under different working conditions
4 结 论
本文通过高精度北斗导航系统获取植保无人机飞行参数,使用质量分数为1.0%的RQT-C-3荧光增白剂水溶液代替农药对3WQF-80-10型植保无人机进行不同飞行参数下的喷雾测试,采用长条纸带连续布样和水敏纸离散布样2种雾滴收集方式,利用荧光示踪法和水敏纸图像处理方法获取雾滴沉积覆盖率,比较分析2种采样方式下雾滴沉积分布特性,并探讨植保无人机飞行参数对雾滴沉积分布的影响规律。得出如下结论:
1)荧光示踪法与水敏纸法所得雾滴沉积覆盖率分布曲线整体趋于一致,均方根误差为0.24%~2.49%,2种检测方式所得雾滴覆盖率结果相关性较好,拟合优度(R2)范围为0.88~0.96,仅试验组6(飞行速度4 m/s,飞行高度9 m)条件下,2种方法所得雾滴覆盖率结果有显著性差异,说明植保无人机常规作业条件下,基于荧光示踪的检测方法能够表征雾滴沉积覆盖率参数。
2)与水敏纸离散布样方式相比,基于荧光示踪的连续布样所得覆盖率曲线出现多个峰值,后者的雾滴覆盖率均值高于前者,当植保无人机飞行速度为4 m/s,相对靶标高度为9 m时,荧光示踪法所得覆盖率较水敏纸法增加97.77%,离散布样方式所得沉积结果难以有效表征施药喷幅内整体雾滴沉积分布情况,主要原因是植保无人机飞行产生翼尖涡驱使雾滴非定向运动所致。
3)在本文试验条件下,施药雾滴沉积受飞行速度和相对靶标高度的影响,飞行速度为2 m/s时,飞行相对高度6 m较3 m时所得覆盖率降低52.40%;飞行相对高度为6 m时,飞行速度3 m/s较2 m/s时的雾滴覆盖率降低47.97%。
综上所述,植保无人机采用空中作业方式,高速旋转旋翼产生的下洗气流驱使雾滴非定向沉积,导致雾滴沉积密度小尺度空间波动剧烈,因此,在进行植保无人机地面沉积质量检测或研究下洗风场对雾滴沉积分布影响规律时,应采用连续布样方式,以便更具体全面地评估整体雾滴沉积分布。