机载圆周SAR成像技术研究
2020-05-18安道祥陈乐平黄晓涛周智敏
安道祥 陈乐平 冯 东 黄晓涛 周智敏
(国防科技大学电子科学学院 长沙 410073)
1 引言
圆周合成孔径雷达(Circular Synthetic Aperture Radar,CSAR)作为一种新兴的SAR成像模式受到越来越多的关注。与直线轨迹SAR(Linear SAR,LSAR)相比,CSAR成像具有很多独特优势。首先,在CSAR成像中,雷达搭载平台围绕观测场景作360°的圆周运动,同时天线波束始终指向观测场景,这使得CSAR能够实现最高达亚波长量级的二维空间分辨率,从而获得更加精细的观测目标信息;其次,CSAR的圆周成像模式能够获得观测目标的全方位散射信息,可避免常规LSAR成像中存在的目标遮挡、阴影等现象,从而获得更加全面的目标成像信息;最后,与单基线LSAR相比,单圆周CSAR即可实现对观测目标的三维图像重构,获得更多维度的目标成像信息。近年来,随着多基线CSAR-全息SAR(Holographic SAR,HoloSAR)三维成像技术的出现与不断发展,人们能够获得高分辨率的目标全方位三维图像,这将有助于实现更高精度的雷达图像解译处理。
20世纪90年代初,美国学者提出了早期CSAR成像探测的概念,并开展了CSAR成像模式的初步探索[1]。该时期研究人员以CSAR成像机理研究为主,基于目标各向同性散射假设,推导了场景中心理想目标的点扩展函数,并讨论了图像分辨率[2]。同时期,除理论研究外,研究人员在可控实验环境下,进行了CSAR原理性验证,获取了以“T72型”坦克为代表的目标三维图像。随着相关研究的不断深入,CSAR成像的独特优势日益凸显,并引起了国内外学者的广泛关注。美国空军实验室(Air Force Research Laboratory,AFRL)[3-8]、德国宇航中心(German Aerospace Center,DLR)[9-15]、瑞典国防研究院(Swedish Defense Research Agency,FOI)[12,16]、法国宇航局(French Aerospace Agency,ONERA)[17,18]等国外机构基于自主研制的SAR系统陆续开展了机载CSAR外场飞行试验,相关实验结果表明CSAR成像能够获得更为完整和精细的地物信息,同时美国的AFRL[19]和德国的DLR[15]还开展了HoloSAR三维成像飞行试验。国内国防科技大学[20-23]、中国科学院电子所[24-28]和中国电子科技集团第38研究所[29]等单位也利用自主研制的不同频段SAR系统开展了机载CSAR外场飞行试验[21,28,29],获得了高质量机载CSAR实测图像。此外,西安电子科技大学[30,31]、成都电子科技大学[32-34]、上海交通大学[35]、南京邮电大学[36]等高校也开展了CSAR相关技术研究,内容涵盖成像机理、分辨率分析、成像方法、运动补偿方法、CSAR干涉测量、三维成像等诸多内容,并取得了具有重要理论意义和实用价值的研究成果。
本文在介绍机载CSAR成像模型的基础上,重点介绍了作者团队近年来在机载CSAR成像技术方面开展的研究工作,具体安排如下:第2节给出了机载CSAR成像模型,在此基础上,研究了机载CSAR非相干成像下的空间分辨率评估方法;第3节讨论了结合自聚焦的机载CSAR成像方法与处理流程,并给出了本团队所获取的机载P波段CSAR实测数据成像结果;第4节给出了基于单圆周CSAR的目标三维图像重构方法,以及相应的实测数据处理结果;进一步,第5节给出了机载HoloSAR三维成像方法,以及相应的实测数据处理结果;最后,第6节总结全文。
2 机载CSAR成像模型
2.1 机载CSAR回波信号模型
图1给出了机载CSAR的成像几何。在成像探测过程中,雷达系统搭载平台在与x-y轴相平行的平面内,以高度H绕着z轴,做半径为Rxy、切向速度为V的360°圆周轨迹飞行,其间雷达天线波束始终指向场景中心O,从而实现对场景的全方位观测,获取观测目标的全方位散射信息。
设飞行平台位x正半轴上时为慢时间η的0时刻点,则方位角为以x轴为相对起点,取值为ϕ(η)=V η/Rxy。设雷达俯仰角θ,且雷达平台相对场景中心的瞬时斜距Rc在整个运动过程中保持不变,观测半径为Ra。记η时刻雷达天线相位中心位置矢量为l(η)=(x(η),y(η),H(η))。设点P为观测场景中任意点目标,其位置矢量可以表示为rP=(xp,yp,zp),则天线相位中心l(η)到点目标P 之间的瞬时斜距为
设发射信号为一连串的线性调频脉冲信号(Linear Frequency Modulation,LFM)
其中,t为全时间,N为发射信号包含的脉冲总数,T为脉冲重复周期,单个脉冲的线性调频信号为

其中,rect(·)表示矩形窗函数,τ为快时间变量,TP为发射信号的脉冲宽度,fc为发射信号中心频率,以及K为线性调频率。发射信号经过目标P反射后,返回接收天线处的点目标回波信号为

图1 机载CSAR成像几何Fig.1 Airborne CSAR imaging geometry

其中,σp(t;rP)表示目标 P的后向散射系数;wp(t;rP)为天线调制因子;c为光速常量。经正交解调后,点目标回波信号变为[37]
式(5)即为CSAR成像下点目标回波信号的数学模型。
2.2 机载CSAR空间分辨率评估方法
图像分辨率是衡量SAR系统探测性能和评估雷达图像质量的重要技术指标之一。因此,每当一种新兴成像模式出现时,人们首先关心的就是它所能达到的空间分辨率。与LSAR相比,CSAR理论上能够获得1/4波长的图像分辨率,但这个理论分辨率的获取要求采用CSAR全相干成像处理,且观测对象是各向同性的目标[10]。然而,在实际应用中,绝大多数观测目标都是各向异性的,因此无法实现有效的全相干积累成像。此时,为了获得更好的成像结果,人们通常选择采用非相干成像方法。尽管只有一字之差,但相比较于全相干成像,采用非相干成像处理所能达到的图像分辨率却完全不同。与全相干成像相比,非相干成像的分辨率评估要复杂得多,而得出一个准确的分辨率评估解析式则更加不是一件简单的事情。本节就来探讨一下机载CSAR全相干和非相干成像下的空间分辨率评估问题。
LSAR成像处理通常选取在斜距平面进行,尤其是频域成像,雷达成像结果展现在斜距平面上。然而,由于特殊的成像几何,CSAR的回波录取面无法统一地展示在同一个斜距平面上,其完整的录取数据面可视为一个圆锥曲面,因此其三维空间的波数支撑域也可以用该曲面表示[10]。图2(a)给出一个位于场景中心的点目标波数支撑域。
为统一CSAR二维成像结果,通常将其呈现在水平面上,即x-y平面上,该平面上的波数域支撑的投影如图2(b)所示。将其由(kx,ky)转换到的极坐标系(κ,ϕ)上,点目标脉冲响应函数在对应的图像极坐标系(ρ,φ)的积分表达形式为
根据目标波数二维支撑域H(κ,ϕ),可得中心参考点目标的脉冲响应函数为[37]


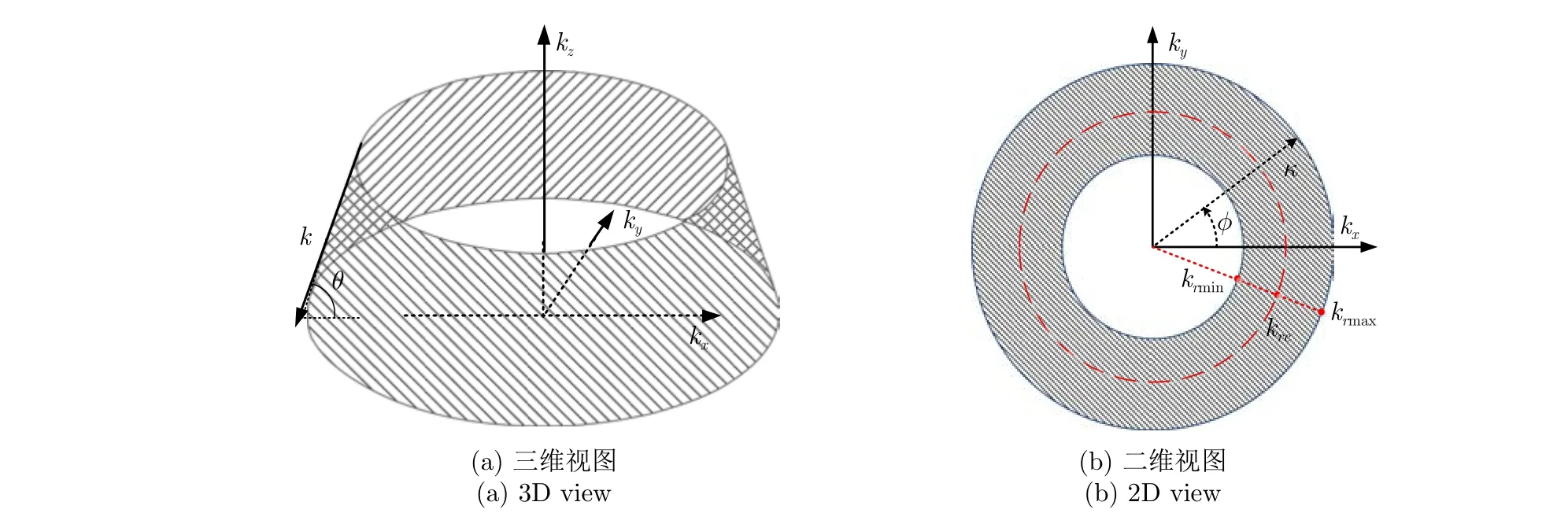
图2 CSAR成像的波数谱支撑图Fig.2 The supported wavenumber spectrum of CSAR imaging
由式(8)可知,当发射电磁波为点频信号时,CSAR对理想点目标具有成像能力,且对应的点目标脉冲响应函数特性由0阶贝塞尔函数特性决定。由式(7)与式(8)可知,理想点目标的CSAR脉冲响应函数与方位角φ无关,而不再仅仅取决于信号带宽,且二维分辨率主要由雷达载频决定。这是 CSAR理论上能够获取亚波长级二维分辨率的原因。此外,评估CSAR图像的主要技术指标(如分辨率、峰值旁瓣比、积分旁瓣比),由Bessel函数特性和载频、信号带宽共同决定。0阶贝塞尔函数在-3 dB时的主瓣宽度为0.1950,由式(8)可得单点频下点目标脉冲响应函数可得CSAR的理论分辨率为

其中,λrc为载波波长,θ为入射角。可发现,CSAR成像下的理想点目标的空间分辨率可达到亚波长量级。显然从式(7)中难以得到CSAR分辨率的解析表达式。但仍可以采用数值计算的方法分析CSAR的分辨率特性[38]。
需要说明地是:上述分析是建立在CSAR全相干成像处理基础上进行的。然而,在实际场景中,绝大多数目标的散射特征都是各向异性,即有效散射角度范围很小,从而限制了全相干成像处理的高分辨率优势。研究表明:对于城镇区域的高分辨成像,由于其场景中以各向异性散射的人造目标为主,采用非相干成像处理可以获得更高质量的成像结果。那么除了直观观察外,如何准确地评估CSAR非相干成像所能达到的空间分辨率呢?下面就对这个问题作深入分析。
CSAR非相干成像处理主要包括3个步骤:首先,根据期望分辨率值和观测目标的散射特点,将CSAR的360°全孔径数据分割成若干个子孔径数据;然后,对这些子孔径数据分别进行相干成像处理,可采用极坐标算法(Polar Format Algorithm,PFA)、后向投影算法(Back-Projection Algorithm,BPA)和其它有效成像算法;最后,通过插值,将所有子图像投影到同一坐标系,并进行非相干累加得到最终的成像结果。本节就基于上述处理方法,推导点目标的脉冲响应函数,进而评估所能达到的空间分辨率。
如图4(a)所示,设分割成的子孔径积累角为ϕsub,则子孔径的个数为N=2π/ϕsub。不同方位角对应的子孔径的点目标脉冲响应函数可以通过旋转其方位中心角来获取,并将这些子孔径非相干累加,则非相干处理下的CSAR点目标脉冲响应函数为

其中h(ρ,φ+nϕsub)表示第n个子孔径的点目标脉冲响应函数。实际中,非相干成像处理所选取的子孔径积累角较小,子孔径频谱可近似为一个二维矩形函数。因此,在式(10)中的h(ρ,φ+nϕsub)可以用高波段SAR点目标响应函数表示,故将其重写为
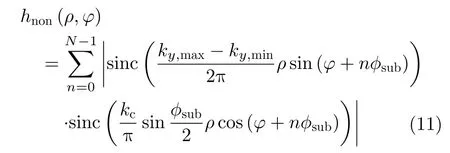
在非相干成像处理下,位于场景中心处的理想点目标在CSAR图像中同样呈现为各向相等的圆点。因此,式(11)关于φ对称;换言之,与φ无关。所以,为简化式(11),取φ为0,同时为得到更具一般性的结果,对式(11)采取了相对于中心波数kc的归一化,然后可得[39]

由式(12)可见,CSAR非相干成像处理下的点目标脉冲响应解析式由相对带宽比Br和所划分的子孔径积累角ϕsub共同决定。需注意的是,式(12)是基于子孔径积累角符合窄波束窄带假设(方位分辨率差于距离分辨率或者相对带宽比小于20%)条件[40]下成立的。若划分的子孔径空间不满足该条件,仍需参考复杂的子孔径点目标脉冲响应函数进行计算。
当给定Br和ϕsub时,通过计算点目标脉冲响应函数的-3 dB宽度可求得其分辨率,即求解式(13)

显然,由式(13)很难得出关于ρ′的根解析表达式。因此,本文采取数值分析的方法来寻找Br和ϕsub两个变量与根之间的关系。基于这种思想,将分辨率表示为

其中,∆ρ为通过CSAR点目标脉冲响应函数估计得到的非相干分辨率,定义Γ(Br,ϕsub)为波数展宽因子。下面将对波数展宽因子进行数值分析。由于该因子是由Br和ϕsub两个变量共同决定,因此基于这两个变量的Γ(Br,ϕsub)仿真结果如图3所示。

图3 不同子孔径积累角与相对带宽比下的波数展宽因子仿真结果Fig.3 The simulated results of HPBW factor versus to the different fractional bandwidths and subaperture angles
观察图3可发现,随着相对带宽比Br和子孔径积累角ϕsub的增大,波数展宽因子Γ (Br,ϕsub)的数值成指数下降的趋势。采用曲线拟合的方法,可得到波数展宽因子曲面的表达式

其中拟合参数为

再综合考虑电磁波入射角θ和中心频率fc,即可得到CSAR非相干成像处理下的空间分辨率评估表达式

需注意的是,由于Γ拟合函数是基于Br ≤1和ϕsub≤40◦数据得到,因此当子孔径积累角较大时,不宜用一个近似的Γ (Br,ϕsub)去评估CSAR非相干成像分辨率。从已有关于目标散射范围的研究[9,10]得知,强散射体通常具有的方位散射角范围较小,大多数在2°~5°之间,少数能达到10°~20°。因此,式(15)所给的拟合范围能够涵盖绝大多数情况下的CSAR非相干成像处理的空间分辨率估计。
图4给出了Br=0.2时,CSAR点目标非相干成像分辨率与其所对应的子孔径分辨率的对比,其中纵坐标表示的分辨率单位为相对应的载波波长。为便于分析,图中所给的方位向和距离向均基于图4(a)中的子孔径给出。由图4(b)可见,当ϕsub≤9.6◦时,非相干成像处理的方位向分辨率优于子孔径图像的方位分辨率,尤其是在子孔径较小时,非相干成像处理的方位分辨率相较于其子孔径图像的方位分辨率有很大提高。但当ϕsub>9.6◦时,非相干成像的方位分辨率反而不如单个子孔径图像的方位分辨率。而图4(c)所示的距离向分辨率对比结果,则恰好相反。当时,非相干处理的距离向分辨率差于其子孔径图像的距离向分辨率;而当时,非相干处理的距离向分辨率优于单个子孔径图像的距离向分辨率。
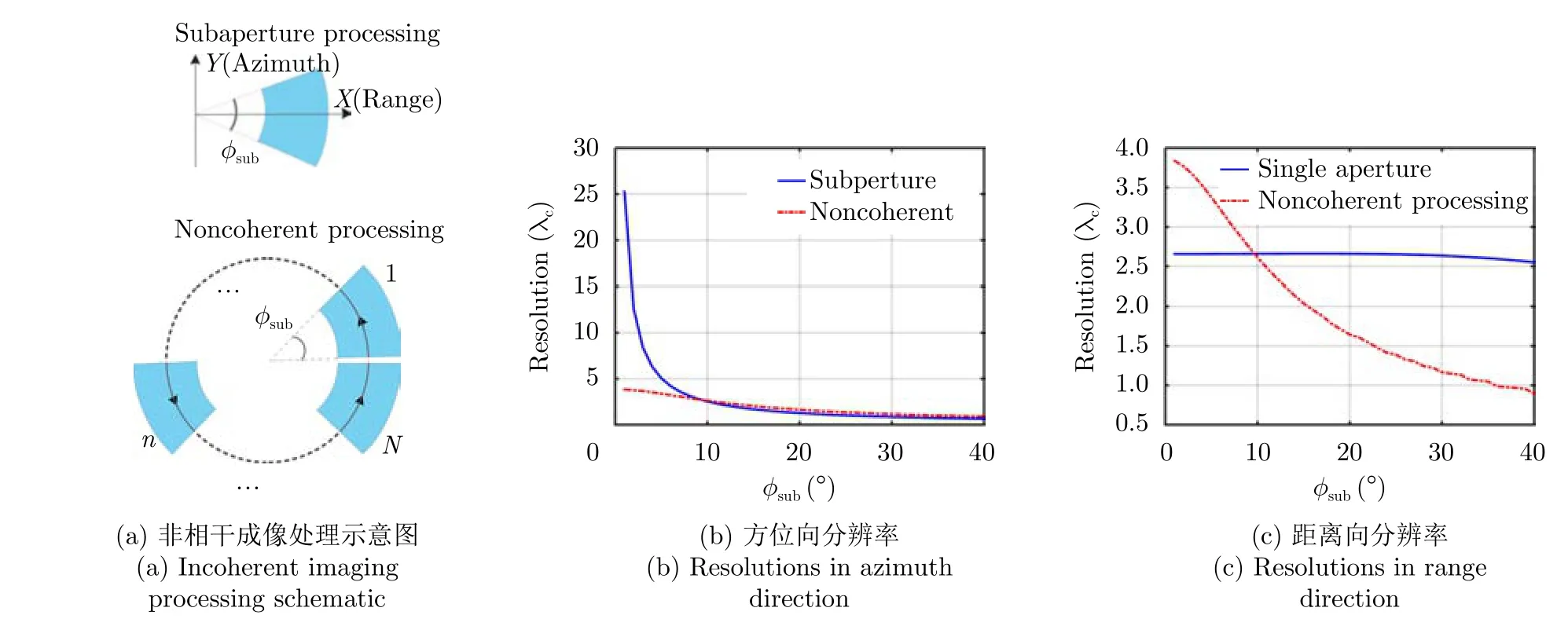
图4 不同子孔径积累角下的分辨率变化曲线Fig.4 Investigation of the resolutions with respect to the different subaperture angles
3 机载CSAR二维成像方法
3.1 二维成像算法
按照信号处理域的不同,SAR成像算法可概括地分为两大类:时域算法和频域算法。由于CSAR成像轨迹的特殊性,其成像算法不同于常规LSAR。常见的基于直线轨迹推导的频域算法均不能很好地适应CSAR成像几何。美国学者M.Soumekh[41]最早基于格林函数傅里叶分析,提出了波前重构类算法。该算法利用快速傅里叶变换提高了成像效率,但需实现系统核函数矩阵求逆操作,算法实现复杂。此外,基于该算法的运动误差补偿难度高,效果差,因此无法应用于机载CSAR实测数据处理。而适用于CSAR成像几何的PFA算法是基于远场假设,成像聚焦深度受限,存在成像场景边缘处目标聚焦不理想等问题。结合子孔径处理及TRD匹配滤波处理,文献[22]提出了适用于CSAR较大观测场景的频域成像处理算法,但是该算法存在运动补偿难度大的缺点。
时域算法对复杂成像几何具有很强适应性,如后向投影算法(Back Projection Algorithm,BPA)几乎可以适用于任意成像几何[42,43],但庞大的计算量限制了该算法的实际应用。为减小计算量,提高计算效率,一系列快速后向投影(Fast Back Projection,FBP)算法应运而生,如局部BP(Local BP,LBP),四分树BP(Quadtree BP,QBP),快速分级BP(Fast Hierarchical BP,FHBP)和快速因子分解BP(Fast Factorized BP,FFBP)[44]。其中FFBP算法能达到接近于频域算法的理论计算效率,发展最为迅猛。FFBP算法处理回波信号时利用极线图像近似局部区域图像,并采用递归孔径划分处理和局部近似处理,使其计算量得到大幅度减小。早期,FFBP算法被用于处理大积累角的低频超宽带SAR数据,得到了很好的效果。目前基于单站LSAR的FFBP算法已成功推广至双站和曲线SAR成像领域。DLR的O.Ponce与P.Prats等人[10]率先采用FFBP算法对L波段的机载CSAR实测数据进行了成像处理,获得了良好的图像质量。随着硬件水平的飞速发展,笔者认为时域算法能结合GPU等并行处理架构加速算法,适用性更为广泛,拥有更广阔的发展前景,尤其是面对CSAR这类成像几何复杂的SAR成像需求。
3.2 自聚焦算法
与LSAR相比,CSAR具有更长的合成孔径时间,因此孔径时间内积累的测量误差相对较高,相应地对定位设备的测量精度提出了很高的要求。目前,单纯依靠商业级的GPS/INS产品,无法满足高分辨率CSAR的成像精度要求。针对这个问题,国内外一些研究机构在进行CSAR实测数据处理时,都采取了一些弥补测量设备定位精度不足的辅助手段,主要包括两类方法:一种是基于人为设置定标器的运动误差补偿。主要代表有:美国AFRL在某停车场的机载CSAR实测数据成像处理中,采取在观测场景中放置四面角反射器的方法,利用这些近似各向同性反射的四面角反射器作为定标器,以该反射器为基准,采用重叠子孔径的方法,提取每一帧子孔径图像中四面角反射器的偏移位置,从中推算得出相位误差数据[45,46];法国ONERA在X波段机载CSAR成像试验中,同样是在观测场景内放置了3个定标器,然后利用三角定位法来测定机载平台的运动误差数据[47]。德国DLR所开展的大量机载CSAR外场试验中,也是采用在观测场景内放置定标器的方法来补偿平台运动误差。早期试验采用的定标器大多为龙伯格透镜,因其具有良好的全向反射特性,可视为场景中的一个理想点目标。通过估计其二维频谱,得到运动补偿数据。后期试验中,德国DLR则利用多个三面角反射作为定标器,来矫正运动误差[12]。可发现,这些方法的原理都是通过人为放置定标器来获取精确的平台运动误差数据,以解决测量设备定位精度不满足成像要求的问题。然而,在实际应用中,对于某些观测场景来说,并不具备提前预设定位器的条件。另一种是基于图像特显点的运动补偿方法。主要代表有:中国科学院电子学研究所提出的基于逆回波生成的相位梯度算法,该算法利用图像中的特显点生成逆回波,从逆回波信号中提取相位误差[27];以及国防科技大学提出的基于最优化准则的后向投影自聚焦成像方法。这类方法的优势是在于不依赖于定标设备,而是基于CSAR数据中的特显点来提取相位误差,从而达到运动误差补偿的目的[20]。因此,这类方法比较依赖图像质量以及特显点的提取精度。
本文将对基于最优化准则的BP自聚焦算法进行介绍。传统基于回波数据的自聚焦方法(如相位梯度自聚焦法),可直接应用于图像域进行自聚焦处理,但要求图像域数据和相位历史之间满足傅里叶变换对的关系,而这个关系在CSAR的复杂成像几何中很难成立,因此不能直接应用于CSAR成像处理;而图像位移算法(Map Drift Algorithm,MDA)是建立在LSAR运动误差模型基础上,同样不能直接应用于CSAR成像几何下的运动补偿处理。根据最优化准则,Ash[48]提出了一种基于最优化准则的BP自聚焦算法(Autofocus BackProjection,ABP),将成像和自聚焦联系起来,理论上能够适应任意成像构型,且易与运动补偿和数字地形高程(Digital Elevation Model,DEM)数据相结合。然而,该方法需计算并存储每一条回波对于整个场景的投影,由此带来非常大的计算量和存储空间需求。Hu等人[49]对其进行了改进,减小了计算量和存储空间。陈乐平等人[20]考虑到了ABP的相位误差估计结果受到观测场景的目标能量分布的影响,选取场景中多块包含强目标的小场景区域进行相位误差估计,通过引入能量平衡函数,减小各区域之间的估计权重差值。为减小CSAR成像中相位误差的影响,本文采用了基于EABP (Extended Autofocus Back-Projection)[50]的CSAR非相干成像方法,如图5所示。首先,根据分辨率要求和观测目标的后向散射角范围,将完整孔径平均分成I个相同长度的子孔径;其次,采用EABP算法分别对所得子孔径数据进行自聚焦成像处理,得到子图像;最后,将所有子图像通过特征点匹配,进行非相干叠加,得到最终的成像结果。此方法具有可适用于复杂成像几何,自聚焦效果等优点,能够实现对机载CSAR的高质量高分辨成像处理。
3.3 实测数据处理结果
本节给出了作者团队利用自主研制的机载P波段CSAR系统所获取的实测数据成像结果。此次成像的观测场景为陕西省渭南市某国道附近,场景中心为一个环岛路口。该系统的搭载平台为“塞斯纳”小型有人机(如图6(a)所示),平台飞行高度约2085 m,飞行半径约为3000 m。录取一个完整圆周数据所需时间约为6 min。由于飞机平台较小,飞行过程中受到气流影响较大,无法保持理想的圆周运动轨迹,存在较大的运动误差(如图6(b)所示),而飞机上搭载的普通商用米级GPS定位系统无法满足实施高精度运动补偿的要求。因此,成像过程中必须采用自聚焦算法来消除平台非理想运动所带来的影响。
利用本节所提方法对该机载P波段CSAR实测数据进行了成像处理。成像场景大小约为2×2 km(3333×3333 像素),场景采样间隔为0.6×0.6 m。图7给出了所获得的实测数据成像结果。
为了展现CSAR成像的优势,本文利用相同雷达系统分别获取了该观测区域的LSAR图像和CSAR图像,并从中提取出相同的局部区域图像进行比较分析,如图8所示。在LSAR与CSAR成像中,雷达系统均是搭载“塞斯纳”型有人机。该飞机为小型有人机,受气流扰动影响较大,飞行状态不稳,难以实现理想的直线/圆周飞行轨迹;而飞机上所搭载的普通商用GPS的定位精度约为1 m,不满足高精度SAR成像要求。因此,在LSAR与CSAR成像过程中,均采用了基于GPS测量数据的粗补偿和本节所给出的自聚焦精补偿相结合的运动补偿方法。经测量,LSAR图像与CSAR图像的二维分辨率均优于1 m。

图5 机载CSAR自聚焦处理流程图Fig.5 The flow chart of airborne CSAR autofocus processing
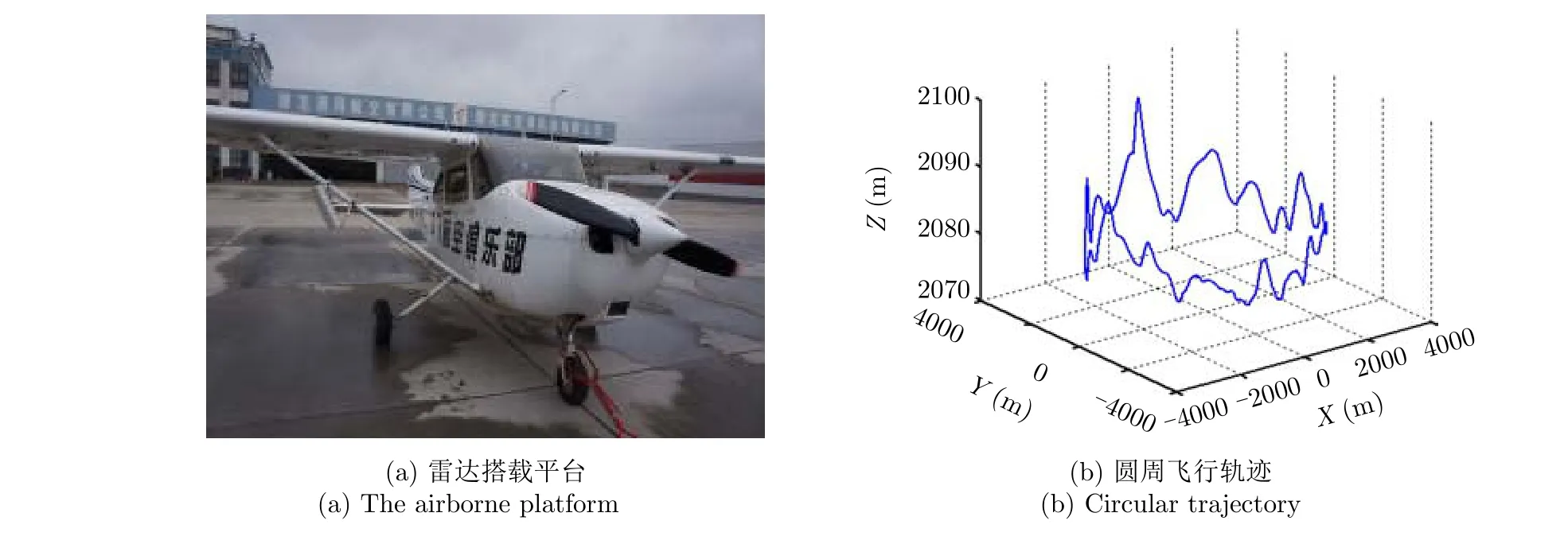
图6 试验平台Fig.6 Experiment platform

图7 机载P波段CSAR成像结果Fig.7 The imaging result of airborne P band CSAR
对比两幅图像可发现,相比较于LSAR图像,CSAR图像具有如下优点:首先,CSAR具有更好的图像质量,包括更高的图像对比度,更清晰的图像纹理;其次,CSAR的全方位成像能够获取清晰的建筑轮廓信息,观测信息更加完整(如图8中A区域);最后,CSAR图像信息更加丰富,一些在LSAR中观测不到的目标,在CSAR中却清晰可见(如图8中B区域和C区域)。
下面将进一步展示观测场景中的细节信息。如图9所示,飞行试验中,在观测场景右下角的纪念广场上布置了两个三面角反射器(红色方框处)和3个圆柱反射器(红色圆圈处)。可发现,这些反射器均得到了高质量的成像结果。此外,在数据录取过程中,有4名试验人员(绿色方框处)站立在人造目标的南侧。由于人体目标对P波段信号反射能力较弱,在此次试验未能获得清晰的人员成像结果(如图9(a)所示),但图像中的人员站立处,还是留下了背景扰动的痕迹。除了布设的反射器目标外,广场周围的各式建筑和栽种的树木也清晰可见,试验结果展现了机载低频CSAR的良好成像性能。

图8 机载P波段LSAR和CSAR成像结果对比Fig.8 Comparison of airborne P-band LSAR and CSAR imaging results
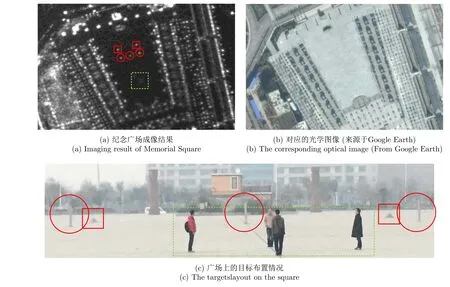
图9 机载P波段CSAR图像的局部放大图Fig.9 Partial enlarged view of airborne P-band CSAR image
由上述试验结果可发现,利用低频段CSAR也能获取地物纹理清晰的高分辨率高质量雷达图像,并解决低频LSAR图像中常存在的地物纹理不清甚至缺失,图像对比度差等问题,从而证明了CSAR成像相比较于LSAR成像所具有的独特优势。
4 基于单圆周CSAR的目标三维图像重构
众所周知,单圆周CSAR即具有获取目标三维图像的能力,而这也是CSAR相比较于LSAR所具有的独特优势之一。针对这个问题,本节将介绍一种基于单极化单基线CSAR数据的车辆目标三维图像重构方法[51]。与传统利用多极化CSAR进行车辆目标三维图像重构方法不同,本文所提方法仅基于单极化单基线CSAR回波数据便实现了车辆目标的三维图像重构。因此,所提方法具有实现简单,数据量小,效率高,成本低等优点。
4.1 车辆目标散射特性模型与分析
根据电磁理论,复杂目标的高频回波响应可视为多个标准散射体的属性散射中心之和[52]。属性散射中心蕴含了目标的位置、幅度、极化等相关信息,能较好地描述目标在SAR数据上的散射特性。本节将主要分析车辆电磁反射模型中不同反射回波生成的属性散射中心在CSAR几何构型下的分布特征。
(1)奇反射。车辆反射的主要电磁回波可分为单反射(图10中紫色线段)和偶反射(图10中绿色线段)。其中单反射是指经过1次反射就回到天线处的电磁回波,主要由车辆棱角提供,这些具有高度维信息车辆棱角,如车顶棱等,可组成车辆立体轮廓。
(2)偶反射。当用几何光学理论来描述雷达散射时,物体表面可视为由许多小面元组成,并假定雷达回波仅由取向与雷达垂直的小面元产生(只有对后向散射的垂直取向,反射波才会返回到接收天线处)。若考虑在一定波长内,一定大小尺寸小面元的实际反射方向图和考虑波长对确定有效小面元数目的影响[53],小面元实际上在各个方向上均有散射,而非只是出现在反射角等于入射角的方向上。因此偶反射路径可假设由3个部分组成,如图11所示分别记为R1,R2和R3。电磁波的偶反射历程如图11所示:入射波经过去程R1,到达至车上高度为∆h的某一散射中心时,第1次反射R2与镜面反射角之间具有一个散射角 ∆θ,R2沿散射角 ∆θ方向与地面产生第2次反射R3后,返回接收天线。其中R2和R3并不是唯一路径,随散射角 ∆θ变化,如图11中绿色阴影区域所示。车辆侧面和平地表面形成一个虚拟二面角,设该虚拟二面角与雷达天线相位中心双程斜距为2R0。基于上述偶反射几何路径模型,可得偶反射回波历程与2R0之间的差值为
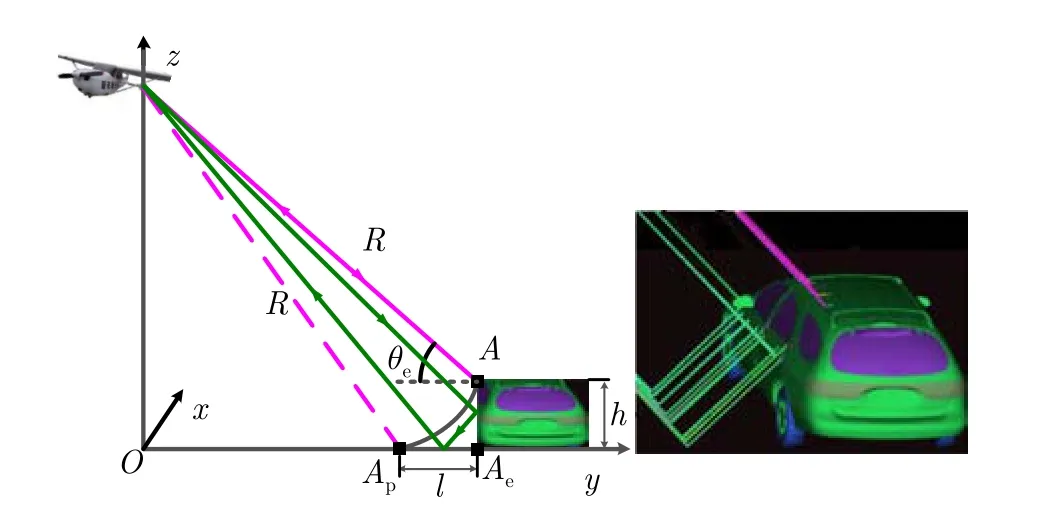
图10 “顶底平移”计算示意图Fig.10 The schematic diagram of“Layover”calculation

根据反射几何可得,对于小场景车辆目标∆R约为0,意味着偶反射与虚拟二面角回波历程相同,故反射能量集中在车辆轮廓上。

图11 偶反射的几何路径Fig.11 The geometry of the even-bounce reflection
图12给出了不同成像处理方法下获取的车辆CSAR成像结果,观察图中的相干成像处理结果可发现,在车轮廓附近分布着偶反射形成的离散属性散射中心,而单反射则由于“顶底平移”效应,在车辆基线外形成一圈外轮廓。文献[7]所提基于多极化单轨数据提出的车辆重构方法,通过极化信息提取由车辆基本轮廓产生的偶反射属性散射中心,然后选取矩形框去拟合这些散射属性中心类矩形分布。一方面,需矩形框的选取是一个多维变量的搜索过程,增加了计算量;另一方面,车辆轮廓矩形化的处理也弱化了车辆轮廓本身的特征,不利于车辆的检测识别处理。非相干处理相对于相干处理,可视为图像的多视成像,具有降低图像噪声的作用,从而有利于车辆轮廓的提取(如图12(c)所示)。在非相干处理下,车辆的轮廓表现为平滑的峰值,因此只需提取其峰值曲线,即可获得车辆轮廓信息。
4.2 车辆目标三维图像重构方法
图13给出了本文所提基于单圆周CSAR的车辆目标三维图像重构处理流程。首先,采用前一小节所提的CSAR成像方法对回波数据进行成像处理,获得一系列由车辆目标检测方法所确定的待重构车辆目标的二维子图像。然后,一方面对子图像进行非相干叠加,从非相干图像中提取车辆目标基本轮廓,并从中估计车辆的长宽等几何参数;另一方面,从子图像中提取属性散射中心,并依据所获得的车辆基本轮廓,从中挑选出由奇反射产生落于外轮廓的属性散射中心点;接下来,根据“顶底平移”模型,计算出奇反射属性散射中心的三维位置;最后,综合获取的基本轮廓和外轮廓信息对车辆进行三维图像重构处理。
4.3 实测数据处理结果

图12 基于Gotcha实测数据的车辆CSAR成像Fig.12 The imaging results of a vehicle in Gotcha public release dataset
为了验证所提方法的正确性和有效性,本文基于美国AFRL公布的某停车场机载CSAR试验数据[54],对停放在停车场内的多个不同类型的车辆进行了三维图像重构处理。该机载SAR系统工作在X波段,中心频率9.6 GHz,信号带宽为640 MHz,飞行半径7090 m,飞行高度7260 m。首先,将完整CSAR回波数据分割成积累角为1°的子孔径数据,并进行CSAR成像处理,成像结果如图14所示;然后,从中选取7个不同车辆分别进行三维图像重构。图15给出了停车场车辆实景照片和采用所提方法获得的车辆三维图像重构结果。可发现,本文方法能够较好地重构车辆的三维图像,并能够依据重构出的三维图像较好地识别出不同车辆的车型(如轿车、SUV等等),从而证明了所提方法的正确性和有效性。相应地,表1给出了车辆实际大小尺寸和采用本文方法获得的估计结果。表中的l,w和h分别表示车辆的实际长、宽和高。分别表示本文方法测得的车辆长、宽和高。∆l=l −,∆w=w −和∆h=h −分别表示车辆的实际长宽高与测量结果的差值。µ和σ分别表示相应估计误差的均值和标准差。观察表1给出的数据可发现,相比于传统利用全极化CSAR数据获得的估计结果[55],本文所提方法不仅仅用单极化数据,而且估计得出的车辆几何参数值十分接近于真实值,从而证明采用所提方法重构出的车辆三维图像具有较高的精度。
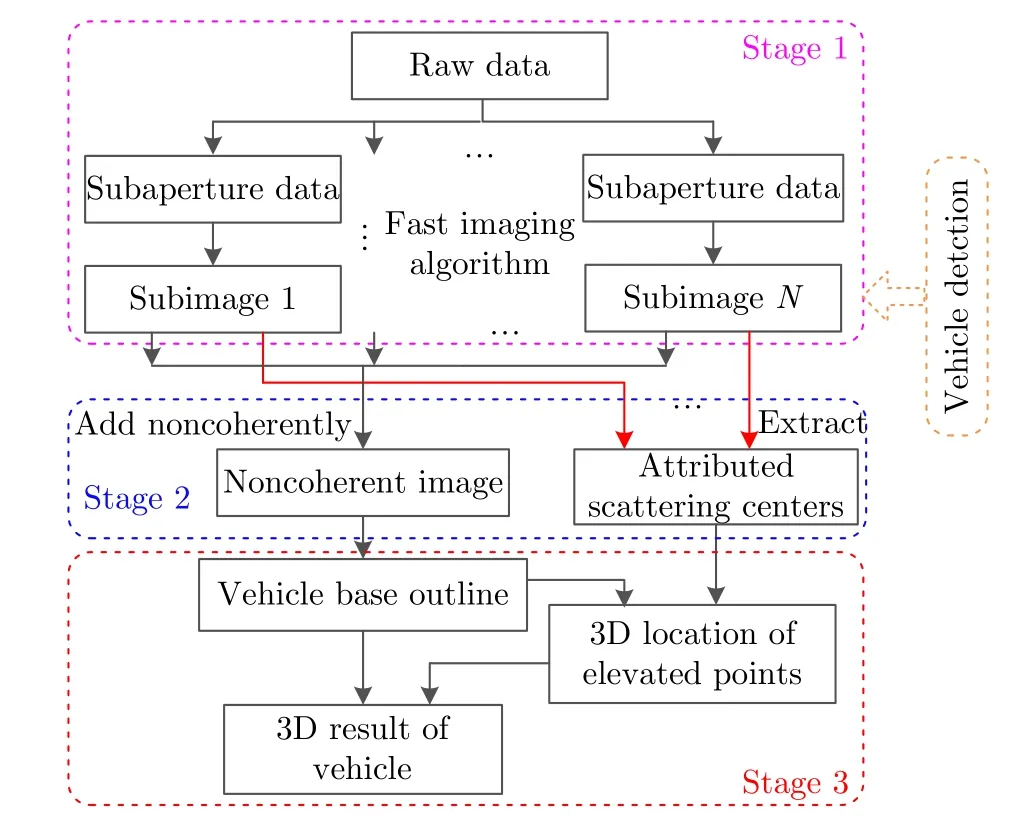
图13 基于单圆周CSAR的车辆目标三维图像重构流程Fig.13 The flowchart of the 3D reconstruction of vehicle’s outline based single-pass CSAR
需要说明的是:尽管本节利用单圆周单极化CSAR实现了车辆目标的三维图像重构,但基于这种重构三维图像只能获取观测目标的高程(高度)信息,并不具备高度维的分辨能力。因此,本节所呈现的单圆周单极化CSAR三维图像重构方法并不是真正意义上的三维成像,只能算作是2.5维成像。尽管利用其它方法能够实现单圆周CSAR真正意义上的三维成像[10],但是由于垂直于视线方向(perpendicular to the Line Of Sight,LOS⊥)上空间频率的缺失,导致其高度向分辨率较差,且三维成像结果中存在较为严重的锥形旁瓣。为了提升CSAR的三维成像性能,人们又将单圆周轨迹扩展为多圆周轨迹,从而在高度向上增加了一个合成孔径,这样就能够实现对观测场景的360°全方位高分辨率三维成像。这种具有多圆周轨迹的CSAR成像模式被称为全息SAR(Holographic SAR,HoloSAR)[56,57],本文下一节内容将对此作详细介绍。
5 机载HoloSAR三维成像方法
与单圆周CSAR相同,HoloSAR也是一种具有宽方位角的SAR成像模式。因此,在HoloSAR成像中,同样存在方位向全相干处理和非相干处理两种方式。当目标的方位向散射特性满足各向同性假设时,可以采用方位向全相干处理方式。这种处理方式与传统LSAR成像中的方位向处理方式是一致的,可以使HoloSAR获得最佳的二维平面分辨率。然而,当目标的方位向散射特性不满足各向同性假设时,采用方位向全相干处理方式反而会使得图像的信噪比降低[19],从而降低成像质量。如前文所述,实际场景中,满足方位向各向同性散射特性假设的目标较少,大部分目标(特别是城市建筑物和人造目标)的有效方位持续响应角度都不超过20°[58]。因此,现有HoloSAR成像通常采用方位向非相干处理方式。
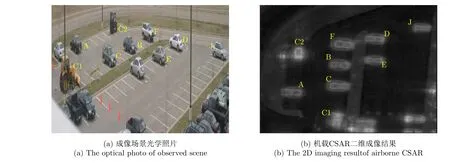
图14 Gotcha数据及CSAR成像结果Fig.14 The Gotcha data and its corresponding CSAR imaging result

图15 车辆照片(上排)和对应的三维图像重构结果(下排)Fig.15 The vehicle photos (upper rows)and their corresponding 3D image reconstruction results (lower rows)
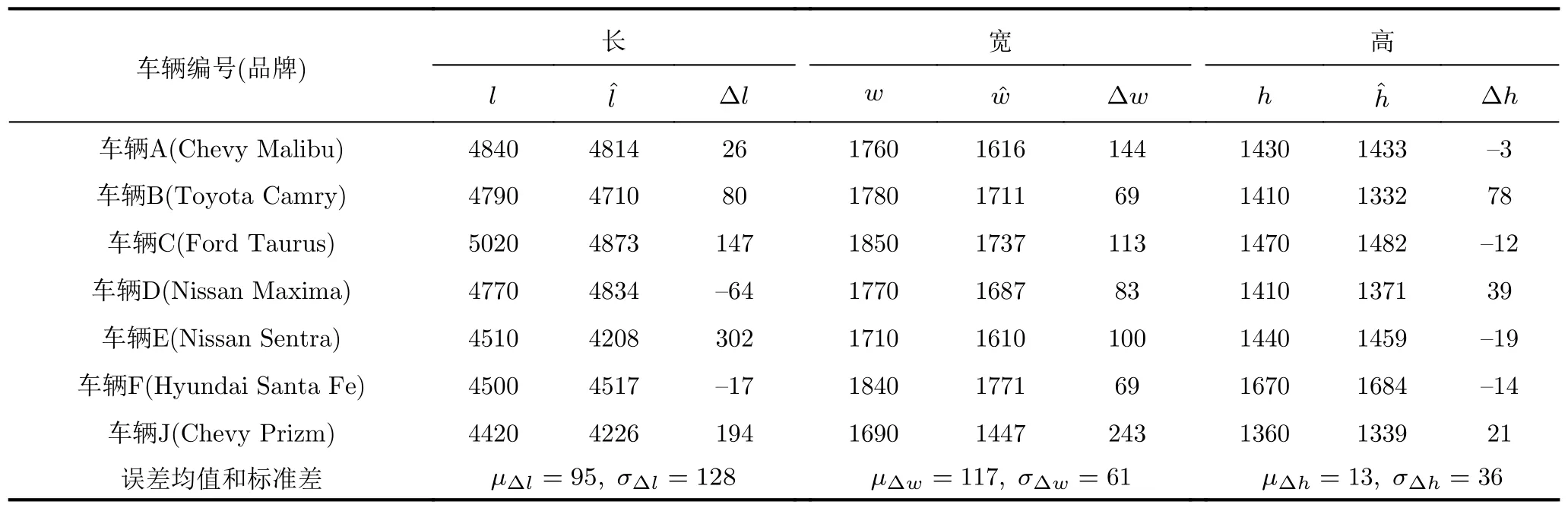
表1 车辆的真实尺寸与估计值对比(mm)Tab.1 The comparisons between the actual size of the vehicles and their estimated values
HoloSAR方位向非相干三维成像是指将完整方位向圆周合成孔径划分为多个子孔径,在子孔径内进行相干三维成像处理,在各子孔径之间采取非相干累加的三维成像处理方式。该成像处理方式充分考虑了目标的非各向散射同性特点,在某个方位向子孔径内,通过采取与TomoSAR相同的处理步骤得到子孔径三维图像。经过多年发展,研究人员们提出了多种方法来实现高质量高分辨率的层析成像[59-62]。其中,基于压缩感知(Compressed Sensing,CS)理论的稀疏重建方法以其优越的性能成为目前最具吸引力的超分辨率稀疏层析成像方法之一。相比较于其它超分辨率层析成像方法,基于CS的层析成像方法可以在保持距离方位分辨率不损失的同时实现层析向的超分辨率重建。因此,基于CS的层析成像方法在城市三维重建和森林生物量监测中均得到了广泛的应用[63,64]。基于CS的层析成像方法也存在一定的缺点,它在重建过程中需要对一个甚至多个超参数进行优化调整,且其重建过程的计算量较大。
为此,本文提出了一种基于迭代自适应方法(Iterative Adaptive Approach,IAA)和广义似然比检测(Generalized Likelihood Ratio Test,GLRT)的超分辨率层析成像方法。该方法不需要进行任何超参数的优化调整,且其同样可以在保持距离方位分辨率不受损失的情况下实现层析向超分辨率稀疏重建。
5.1 HoloSAR三维成像信号模型

图16 机载HoloSAR三维成像几何构型Fig.16 The airborne HoloSAR 3D imaging geometry
机载HoloSAR三维成像的几何构型如图16所示。机载雷达平台在不同高度上围绕观测场景进行圆周飞行探测,共形成了M条圆周运动轨迹,每条运动轨迹的方位角变化范围都是(0,2π]。第m条圆周运动轨迹相对成像场景中心的俯仰角为θm。考虑到场景中目标的非各向散射同性特性,这里采用了方位向非相干的成像处理方式。因此,完整的圆周合成孔径被划分为了N个无重叠的方位向子孔径,每个子孔径的方位张角为∆ϕ,即有N·∆ϕ=2π。
在每个方位向子孔径中,通过层析成像处理来得到子孔径三维成像结果。对于第m条轨迹数据,经过二维成像处理后得到的第m幅二维复图像中某距离方位位置处的复值可以表示为[59]

其中,γ(s)表示与目标的层析向位置s有关的复散射系数函数,∆s表示层析向上目标的分布范围。ξm=2bm/(λr)表示空间频率,其中为第m条轨迹相对参考轨迹的垂直基线,r表示目标到参考轨迹的距离,λ表示信号波长。
从式(19)可以看出,二维复图像中的复值与目标的层析向复散射系数构成了傅里叶变换的关系。因此,我们可以得到层析向聚焦的瑞利分辨率为ρs=λr/(2b⊥)[63],其中b⊥为层析向总基线长度。通过对复散射系数函数沿层析向进行离散采样,可以将式(19)所示的连续信号模型转换为离散信号模型

其中,g为M×1维的测量值矢量,即g=[g1,g2,,···gM]T。A是M×L维的投影矩阵,其中位于第m行第l列的元素为Aml=exp(−j2πξmsl)。sl(l=1,2,···,L)为层析向离散采样位置。γ=[γ1,γ2,···,γL]T为L×1维的离散复散射系数矢量。ε为M×1维的噪声矢量。
各子孔径三维成像处理就是利用M幅二维复图像,将叠掩到同一距离方位单元中目标的层析向位置和复散射系数恢复出来。当获得了所有方位向子孔径内的三维成像结果以后,首先通过坐标转换将它们转换到统一的笛卡尔直角坐标系中,然后再将所有子孔径三维成像结果非相干累加起来,便可得到最终的HoloSAR三维图像。
5.2 基于IAA-GLRT的HoloSAR三维成像
为了实现高分辨率HoloSAR三维成像,本节提出了一种基于IAA-GLRT的超分辨率层析成像方法。该方法首先利用具有超分辨率能力的IAA谱估计方法实现层析向聚焦;然后,将聚焦结果中的所有峰值提取出来,并认为目标信息包含于这些峰值中;最后,将GLRT作为一种模型阶数选择工具从所有峰值中自动选择出最有可能是目标的估计结果。
图17给出了方位向非相干HoloSAR三维成像处理流程,具体包括3个主要步骤。
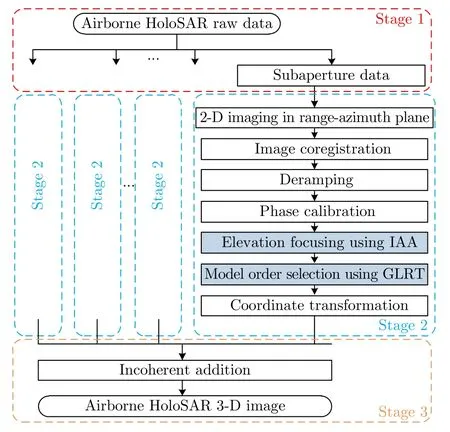
图17 机载HoloSAR三维成像处理流程Fig.17 The airborne HoloSAR 3D imaging processing flow
步骤1 将完整的圆周合成孔径划分为多个无重叠的子孔径,并且同时对回波数据进行相应的划分。
步骤2 在每个子孔径内进行层析成像处理,从而获得多个子孔径三维成像结果。在该步骤中,首先利用各轨迹数据进行距离方位二维成像处理,从而得到多幅距离方位二维复图像。接着以参考轨迹上获得的二维图像为主图像进行图像配准处理,并对配准后的各二维复图像进行去斜处理。为了尽量减少不同轨迹之间的相位误差对层析向聚焦的影响,在层析向聚焦之前还必须进行相位校正处理[57]。经过层析相位校正以后,便可利用本文后续提出的层析处理方法进行层析向成像。最后,将每个子孔径三维图像通过插值转换到统一的直角坐标系下。
步骤3 将所有的子孔径三维图像非相干地叠加起来得到最终的HoloSAR三维图像。
在HoloSAR子孔径三维成像中,实现层析向成像本质上就是求解式(20)所示的线性系统。由于M远小于L,因此该线性系统是欠定的。此外,由于层析向总基线长度的限制,层析向成像的瑞利分辨率往往不能达到预期。为此,提出了一种超分辨率层析成像处理方法。该方法包含两个主要步骤:(1)基于IAA的层析向聚焦;(2)基于GLRT的模型阶数选择。
5.2.1 基于IAA的层析向聚焦
式(20)中的目标复散射系数及其位置估计问题可以看作是一个谱估计问题。IAA是一种可利用单快拍测量数据实现超分辨率谱估计的估计器[65,66]。因此,当将其用于HoloSAR层析向成像时,便可以基于单视复图像来进行层析向成像。由于其不需要距离方位多视处理,因此可以在三维成像中保持“距离-方位”二维分辨率不降低。
基于IAA的层析向聚焦以离散傅里叶变换的结果作为初始输入,通过循环迭代的方式不断提高聚焦结果的分辨率,同时压低聚焦结果的旁瓣。式(20)中的投影矩阵A可以被重写为如下形式

其中,al(1≤l ≤L)表示投影矩阵A的第l列。令P表示L×L的对角矩阵,其对角线上的元素表示层析向各离散采样位置上对应的功率值,即

在开始循环迭代之前,首先需利用离散傅里叶变换的结果来对矩阵P进行初始化。在循环迭代过程中,对角矩阵P通过如下方式不断更新直至达到收敛

其中矩阵R表示数据协方差矩阵。
通常,IAA算法在迭代10次以后聚焦结果的性能便不会得到明显的提升,此时可认为算法达到收敛[66]。在实际数据处理中,由于噪声等因素的影响,数据协方差矩阵R的条件数较大,从而可能导致其求逆结果不准确甚至完全不可逆。为了解决这个问题,我们可以通过对角加载的方式来对矩阵R进行正则化处理[66]。令对角加载矩阵为Σ,其对角线上的元素代表了未知的噪声功率,可以通过如下方式计算得到

其中vm为M×M维单位矩阵I 的第m列。
即使对于层析向轨迹非均匀分布的情况,基于IAA的层析向聚焦依然能够得到较好的成像结果,并且聚焦结果的分辨率和旁瓣水平均由于离散傅里叶变换的结果。
5.2.2 基于GLRT的模型阶数选择
为了得到稀疏的层析向成像结果,可以将IAA聚焦结果中的所有峰值找出来,并认为目标包含于这些峰值中。接着,为了将真正的目标从所有峰值中挑选出来,需要进行模型阶数选择。本文将利用具有恒虚警检测性能的GLRT检测器作为模型阶数选择工具,从而将最有可能是目标的峰值挑选出来。
假设同一距离方位单元中最多有K个层析向上的目标,模型阶数选择问题可以被看作是如式(25)这样一个多元假设检验问题

该多元假设检验问题可以通过K步二元假设检验来实现,其中第i步(i=1,2,···,K)二元假设检验问题为


因此,第i步二元GLRT具有如下的检验表达式[67,68]

经过多步二元GLRT以后,目标的个数以及它们相应的位置就可以确定下来。接着,通过从中提取相应位置上的值便可以得到所检测到的这些目标的复散射系数。通过与GLRT相结合,可以将IAA聚焦结果中由旁瓣或者噪声等引起的峰值尽可能地去除掉,从而可以得到更加精确的层析向稀疏成像结果。
5.3 实测数据处理结果
为了便于对比HoloSAR三维成像与第4节所介绍的单圆周单极化CSAR三维图像重构之间的差别,这里仍然采用本文第4节所使用的美国AFRL公开的Gotcha实测数据来验证我们研究的机载HoloSAR三维成像方法的有效性,并对比分析两种三维成像结果。
实际上,美国AFRL公布的HoloSAR实测数据包含有8条完整的CSAR数据,而在本文前一节的三维图像重构处理只是选取了其中1条CSAR实测数据。在本节的HoloSAR三维成像处理中,将要用到全部的8条CSAR数据。规划的各条轨迹是等间隔均匀分布的,俯仰角范围为[43.7°,45°],相邻两条轨迹的俯仰角差为0.18°。然而,实际中由于气流扰动等因素的影响,机载雷达平台实际的运动轨迹与规划的轨迹有所不同,实际CSAR成像时的平台飞行轨迹如图18所示。
在HoloSAR三维成像中,首先将完整的圆周合成孔径划分为72个无重叠的子孔径,因此每个子孔径的方位张角大小为5°。各子孔径的三维成像处理步骤如图17中的步骤2所示。
首先,利用本文所提方法对结构相对较为复杂的车辆C1进行了三维成像。此处需要说明的是,车辆C1是一辆铲车,其特点是外形结构复杂。相应地,其对应的电磁散射特征也非常复杂,因此无法采用本文第4节所提方法对其进行三维图像重构,只能采用HoloSAR进行真正的三维成像处理,而这也是HoloSAR三维成像相比较于单圆周CSAR三维图像重构的最大优势。当然,这种优势是以更加复杂的成像处理,更多的实测数据为代价换来的。
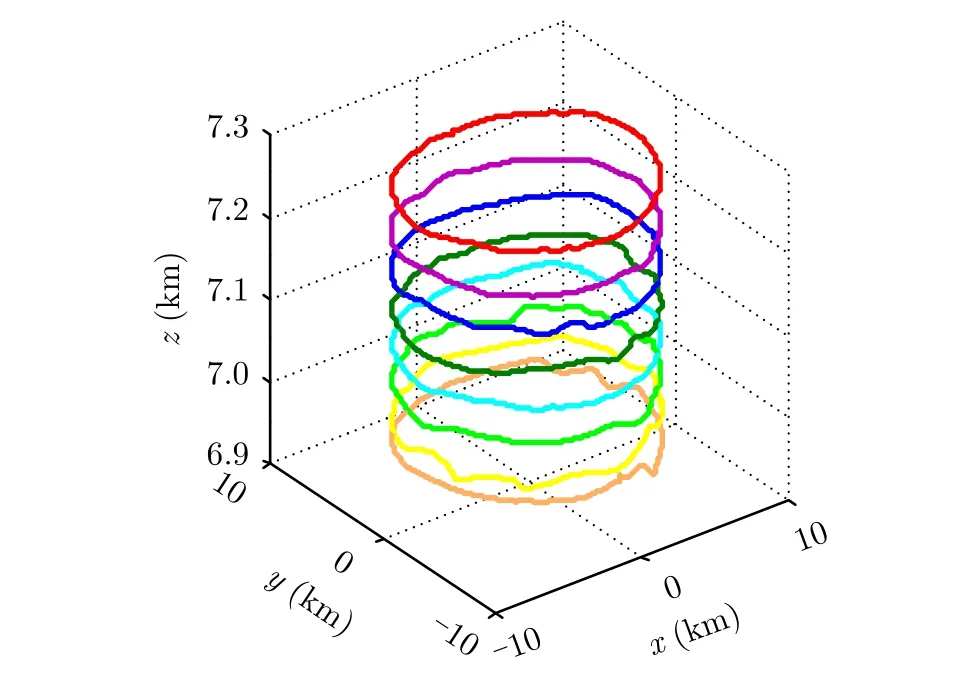
图18 Gotcha数据中雷达平台的实际运动轨迹Fig.18 The actual trajectory of the radar platform in Gotcha data
下面就结合具体的实测数据处理结果来阐述我们所研究的HoloSAR三维成像方法的有效性。图19给出了车辆C1的光学照片,以及利用本文方法得到的三维成像结果。成像结果显示的动态范围均为[-25 dB,0 dB]。从视觉直观对比来看,所提方法可以较好地实现车辆C1的三维成像。车辆C1的三维成像结果在xy,xz和yz平面上相应的垂直投影二维图像如图20所示。从图19和图20可知,利用本文所提方法得到的车辆三维图像与照片中的实际车辆外形结构之间非常吻合,从而证明三维图像具有较高精度。
在本文所提方法中,将GLRT与IAA算法相结合以获得更精确的层析向稀疏重建结果,但是GLRT的计算量与IAA算法的计算量相比微不足道。在上述车辆C1的三维成像过程中,本文所提方法在配置为3.20 GHz因特尔处理器和8.00 GB内存的电脑上利用MATLAB R2013b编程实现,平均每个距离方位单元上的层析向成像时间为0.02 s。因此,本文所提方法可以实现高效率的HoloSAR三维成像。
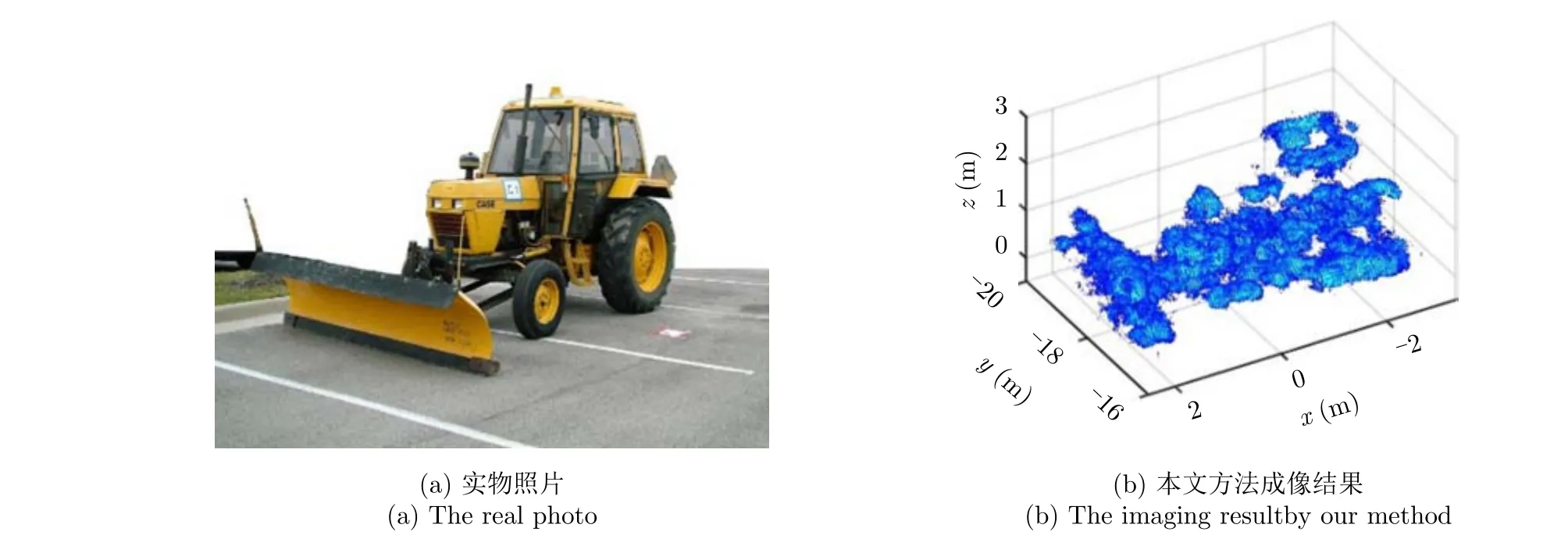
图19 车辆C1的实物照片及三维成像结果Fig.19 The photo of vehicle C1 and its 3D imaging result

图20 车辆C1三维成像结果在不同平面上的二维投影图像Fig.20 The two-dimensional projected images of the three-dimensional imaging results on different planes
为了进一步验证本文所提方法的有效性,利用所提方法对成像场景中的其它车辆进行了三维成像。图21—图23给出了具有代表性的车辆B,F和C2的实物照片,以及相应的三维成像结果(从左至右分别为车辆实物照片、三维成像结果、xy平面投影图像、xz平面投影图像以及yz平面投影图像)。从中可以看出,这些车辆均实现了良好的三维成像,且从成像结果中可以清晰地看出与实物照片相吻合的形状和轮廓。此外,基于三维成像结果,还可获取车辆的长、宽、高等尺寸信息。
表2给出了形状相对较为规则的轿车的尺寸测量结果,并与车辆的真实尺寸进行了对比,其中各项参数的定义同表1。表2中的定量评估和对比结果进一步证明了本文HoloSAR三维成像处理方法的有效性和实用性。与本文第4节所介绍的单圆周CSAR三维图像重构方法相比,HoloSAR三维成像的优势如下:首先,对于类似车辆C1这种具有复杂外形结构和电磁散射特征的特殊目标来说,利用单圆周CSAR三维图像重构无法获得其三维成像结果和几何尺寸信息,而通过HoloSAR三维成像可以实现复杂目标的高分辨率三维成像和高精度几何尺寸测量;其次,对于形状相对较为规则的轿车,通过HoloSAR三维成像所获取的几何尺寸信息的精度高于单圆周CSAR三维图像重构方法,如表1和表2所示。
然而,上述相对单圆周CSAR三维图像重构方法优势的获取是以更大的数据量要求和更多的成像处理时间为代价的。实际应用中,可以根据具体需求和实际情况从本文所提两种CSAR三维图像获取方法中进行合理选择。
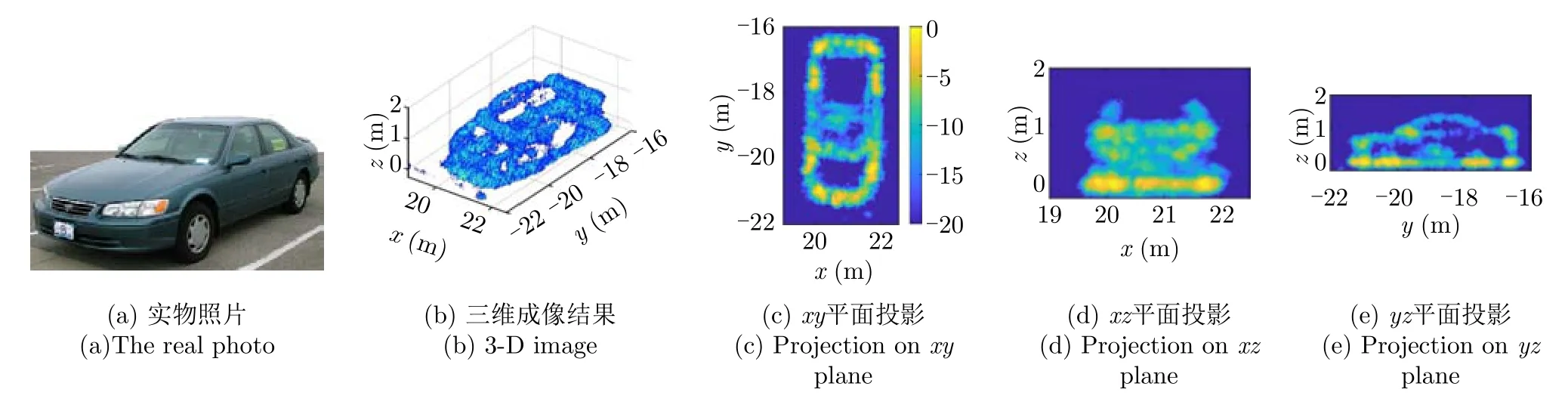
图21 车辆B的HoloSAR三维成像结果Fig.21 The HoloSAR 3D imaging results of vehicle B

图23 车辆C2的HoloSAR三维成像结果Fig.23 The HoloSAR 3D imaging results of vehicle C2
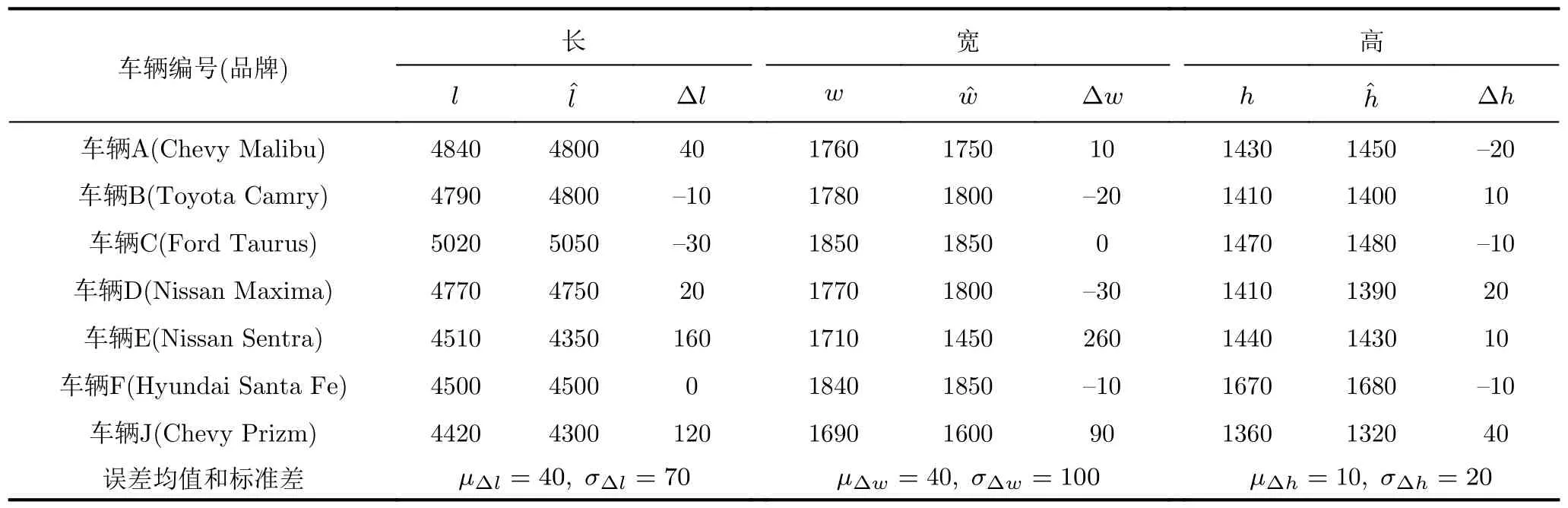
表2 车辆的真实尺寸与估计值(mm)Tab.2 Comparison of the actual size of the vehicle with the estimated value
6 结束语
与传统LSAR相比,CSAR作为一种新兴成像模式,相关技术研究还处于初级阶段,尚有很多理论问题和实际问题有待深入研究。本文介绍了作者团队近年来在机载CSAR成像技术方面开展的理论研究,飞行试验和实测数据处理等工作。这些已开展的研究工作验证了CSAR成像相对于LSAR成像所具有的一些独特优势和应用潜力,但同时也发现了很多尚待解决的关键问题,后续我们将继续围绕相关问题开展深入研究,进一步提高CSAR成像技术的实用性能,拓展应用范围。
物固莫不有长,莫不有短。与LSAR相比,目前CSAR还存在一些不可回避的缺点,如平台飞行轨迹复杂,平台及雷达系统操控难度大,成像区域小,成像观测时间长等等。然而,伴随CSAR技术的深入研究和科技的发展,相信这些问题都将会逐步得到缓解,以致有效解决。未来,以CSAR为代表的曲线SAR成像技术将会在指定区域的精细成像探测中发挥重要作用,与其它成像模式一起,彼此间扬长补短,形成优势互补,共同实现更高水平的雷达成像遥感。
