基于深度置信网络的通信控制设备故障诊断
2020-05-18陈子兆矫文成孙慧贤
陈子兆,矫文成,孙慧贤,陈 旭
(陆军工程大学石家庄校区,河北 石家庄 050003)
0 引言
通信控制机作为指控系统重要通信控制设备,对其故障诊断在保障战时通信网络的安全稳定中具有重要作用。目前,故障诊断的方法主要分为定性分析和定量分析两类[1]。在定性分析方法中以基于专家系统和故障树的故障诊断方法最为常用[2-4]。范跃华等采用故障树分析法构建推理策略和推理机,对故障源逐层进行排查诊断[5];刘斌斌通过多个故障树模型和专家系统完成对指控装备的故障诊断[6];苏利敏利用神经网络对数据进行预处理,改善数据库的结构和性能,从而提高专家系统的诊断效率[7]。在基于定量分析方法中,由于系统结构复杂难以构建准确的故障模型,故而常常使用基于支持向量机的方法[8-9]和神经网络的方法[10-11]。罗民将BP神经网络应用于无人机指挥控制系统的故障诊断,解决了专家系统推理时间长、效率低的问题[12];王格芳采用Agent技术构建智能故障诊断模型对炮兵指挥自动化系统的故障诊断[13]。
但是由于指挥控制系统结构的日趋复杂和领域专家缺少,无法对故障系统进行准确建模和缺少必要的专家知识库,使得基于故障树和专家系统的方法耗时耗力且效果较差;同时由于设备故障类型多样且造成原因未知,使用基于支持向量机和BP神经网络的方法易致使故障类型无法准确区分、出现“维数爆炸”等问题。传统的故障诊断方法已无法满足当前装备故障诊断中对时效性和准确性的要求。
深度置信网络作为一种典型的深度神经网络模型,具有优良的特征提取和分类识别能力,已经成功应用于文本检测[14]、信号识别[15]、序列预测[16]、故障诊断[17-20]等领域。本文提出了一种基于小波变换和深度置信网络的通控机故障诊断方法,以两台通控机远距离通信传输为背景,采集传输过程中的故障通信波形作为输入数据,对易发生的故障类型进行识别和诊断,以解决传统故障诊断方法在装备故障诊断中带来的准确率低问题。
1 基本原理介绍
1.1 小波变换
小波变换(WT)作为一种常用的特征提取和信号处理方法,在时频两域都具有表征信号局部特征的能力,在信号低频部分具有较低的时间分辨率和较高的频率分辨率,在高频部分具有较高的时间分辨率和较低的频率分辨率。
小波变换有连续小波变换和离散小波变换两种形式,因为本文实验的数据是经过高频采样后的离散数据,所以采用离散小波变换形式,表达形式为:
(1)
式(1)中,N为采样点数,δt为采样间隔,xm为离散时间序列。
1.2 深度置信网络
深度置信网络(DBN)是一个由多层限制波尔茨曼机(RBM)堆叠而成的深度学习网络模型。
1.2.1限制波尔茨曼机
限制玻尔兹曼机(RBM)是一种无监督学习模型,目的是以某种概率分布最大可能的拟合输入数据的分布。研究表明任何概率分布都可以由基于能量的模型表示,由此定义RBM的能量函数为:
E(v,h,θ)=-vTWh-vTa-hTb
(2)
式(2)中,θ={ai,bj,wij}。故而RBM的联合概率分布为:
(3)
由于RBM模型层间不存在连接,使得每层间节点条件独立,故而可以求得每层激活概率为:

(4)
1.2.2深度置信网络的训练方法
本文使用的深度置信网络模型如图1所示。训练方法采用传统的对比散度算法、贪婪学习和梯度下降算法,首先根据式(3)和对比散度算法计算第一层隐藏层的激活概率和输入层的重构概率。然后根据贪婪学习准则,将第一层隐藏层作为输入层,逐层求得下一层的激活概率,最后根据梯度下降算法对整个DBN网络进行反向调优:
(5)
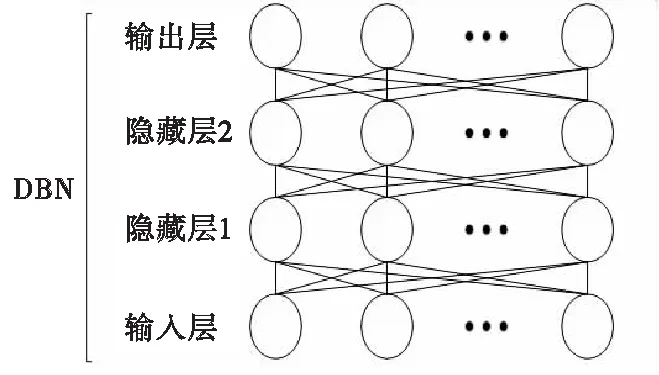
图1 DBN(2 hidden layer)结构模型图Fig.1 Structural model of DBN(2 hidden layer)
2 基于深度置信网络的故障诊断
2.1 故障数据的小波变换和归一化
通信控制机的远程传输信号属于典型的非平稳信号,信号特点表现在时域上的复杂、难区分,而包含的频率成分较为丰富、易识别,故而本文选取小波变换作为特征预处理手段,将提取的时域信号转变至频域信号后进行频谱特征分析。
通过小波变换的时域信号分为高频信号和低频信号两类,低频信号蕴含着信号传输的主要信息内容,而高频信号则给出了传输信号的细节特征和描述。由于深度置信网络的输入数据范围在0~1之间,同时为了加快神经网络训练速度,避免数据出现扁平化现象,所以将两类信号整合作为频域特征信号后将进行归一化处理。
处理方法采用传统的均值归一化:
(6)
本文曾尝试过z-score归一化、Sigmoid函数归一化、log函数归一化等方法,但是发现使用上述方法进行归一化后神经网络训练时间会大幅度增加,准确率下降,分析其原因是由于对原始数据进行非线性的收缩,致使数据过度集中,从而导致训练时间大幅增加,准确率下降,所以选择均值归一化作为归一化方法。
2.2 训练神经网络
由于数据样本量较小,将归一化后的数据输入神经网络中进行训练的过程中,容易出现泛化能力下降,模型过拟合等问题。针对上述可能存在的问题,在深度置信网络中加入稀疏正则项优化神经网络隐藏层间的激活概率,从而优化神经网络的泛化能力,修正后代价函数为:

(7)
式(7)中,Cost(hθ(x(i)),y(i))为代价函数,λ为稀疏正则参数,L(hθ(x(i)),y(i))为稀疏正则函数。
2.3 故障诊断流程
基于深度置信网络的故障诊断是从统计和概率角度出发,对系统的健康状况和可靠性进行推断、估计和预测。其基本思想是通过对系统历史信息的学习来掌握正常系统和非正常系统的表现行为差异,从而实现对系统现在状态的识别和对系统未来状态的预测。故而设计通信控制设备的故障诊断/预测流程如图2所示。

图2 故障诊断/预测流程图Fig.2 Fault diagnosis/prediction process
首先,根据通信信息系统的特点选取合适的监测信号,根据监测信号与特征向量之间的关系,选择适当的特征提取方法计算特征向量,构建故障数据集;其次,利用数据库中历史数据和训练数据,对网络模型进行训练和学习,得到训练完成的神经网络;最后,将实时提取的特征向量输入神经网络,完成现在状态的识别和未来状态的预测。
3 实验与分析
本文实验诊断对象为通信控制机,实验背景为实际环境下,两台通控机之间通过远传群路口进行有线的数据和话音传输,连接方式如图3所示。实验过程中涉及的主要技术参数有群路口A口和群路口HDSL口,端口速率的变化方式为人工或者自动变成设定,具有机外加密功能。
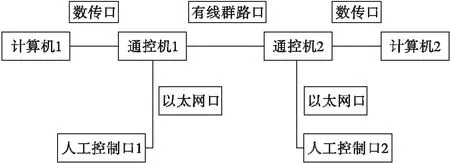
图3 中继方式有线连接示意图Fig.3 Relay mode wire connection diagram
3.1 状态种类设定
在远距离有线传输的工作环境下,两台通控机需要设定为一主一从,同时需要保持相同速率才能完成中继连通。其工作的状态种类主要有:
1) 正常:通控机远距离传输时处于正常工作状态;
2) 短路:通控机远距离传输时出现短路现象;
3) 断路:通控机远距离传输时出现断路现象;
4) 两从:通控机远距离传输时两台通控机设定都为从;
5) 两主:通控机远距离传输时两台通控机设定都为主;
6) 速度不一致:通控机远距离传输时两台通控机设定的速率不一致。
其中短路状态和断路状态两种状态属于线路故障;两从状态、两主状态和速度不一致状态属于设备传输单元故障。
3.2 数据采集及预处理
通过对两台通控机各类参数的设定,使得通控机的远距离传输处于上述六种不同的工作状态下,然后通过示波器对各类工作状态下的传输波形进行观察和采样,采样频率设定为5 MHz,采集1 000个点,按照正常状态与每种故障状态比例为9∶1采集。
因为通控机传输速度有5种不同的速度选项,即两台通控机传输过程中,发生速度不一致的故障将有10种不同的具体故障组合模式,故而我们对每种组合模式按照9∶1的比例采集,组成速度不一致故障数据。
同时因为较通控机工作处于正常状态而言,通控机发生故障的概率极小,所以我们按照实际故障发生比列适当增加采集样本中故障数据所占的比重,以期涵盖更多故障数据特征。
综上所述,实际各类状态采集样本组数分别为:正常数据907组,短路数据206组,断路数据201组,两从数据339组,两主数据200组,速度不一致数据1 181组,共计3 034组。
因为深度置信网络对输入数据范围要求为0~1,所以先对3 034×1 000数据进行小波变换,各类状态数据样本如图4所示。然后采用均值归一化将数据范围变换至范围要求内。最后将3 034组数据分为训练集A、训练集B、训练集C和训练集D四类。
训练集A分为训练数据和测试数据,其中训练数据中正常数据800组,短路数据150组,断路数据150组,两从数据270组,两主数据150组,速度不一致数据1 050组,共2 570组;剩余464组数据组成测试数据。
训练集B删除速度不一致数据状态后,由1 520组数据组成训练数据,剩余333组数据组成测试数据。训练集C和训练集A组成相同,区别在于经过小波变换提取频域特征,而采用频域特征进行学习;训练集D和训练集B的区别,与训练集C和训练集A的区别相似。
3.3 通控机状态识别与诊断
本实验分别选取自建训练集A(时域特征)、训练集B(时域特征)、训练集C(频域特征)和训练集D(频域特征)作为深度置信网络的输入数据,同时选取传统的支持向量机SVM、k临近法KNN、BP神经网络进行对比实验。
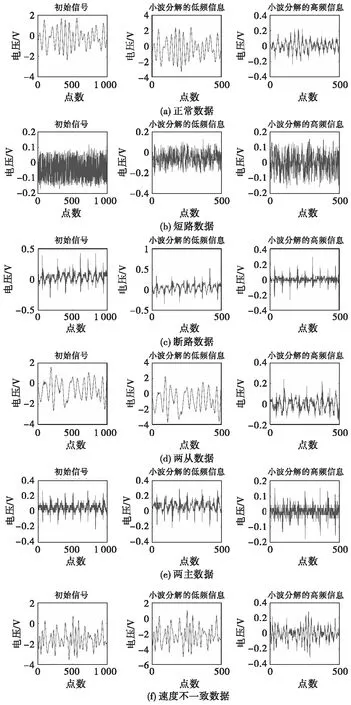
图4 小波变换处理图Fig.4 Wavelet transform processing
实验中DBN、SVM、KNN、BP神经网络均为未改良传统模型,BP神经网络的参数设定为:学习率α为0.01,批训练量batchsizes为1,网络迭代次数为1 000次;DBN神经网络的参数设定为:学习率α为0.01,稀疏正则参数λ为0.000 5,批训练量batchsizes为30,网络训练次数为3 000次。实验开发环境为Matlab R2015b。
实验一为在数据集A条件下对通控机故障数据进行状态识别,实验结果如表1所示;实验二为在数据集B条件下对通控机故障数据进行状态识别,实验结果如表2所示;实验三为在数据集C条件下对通控机故障数据进行状态识别,实验结果如表3所示;实验四为在数据集D条件下对通控机故障数据进行状态识别,实验结果如表4所示。
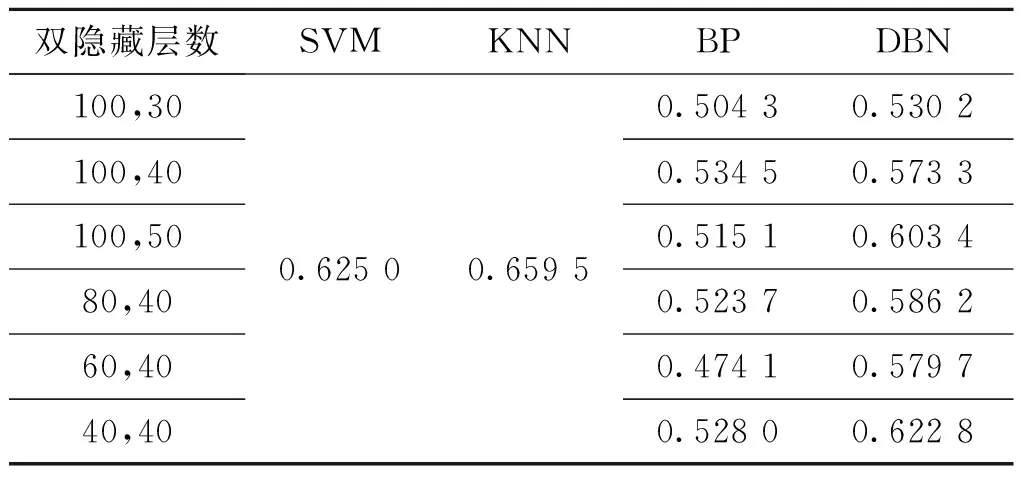
表1 数据集A上四种模型的准确率
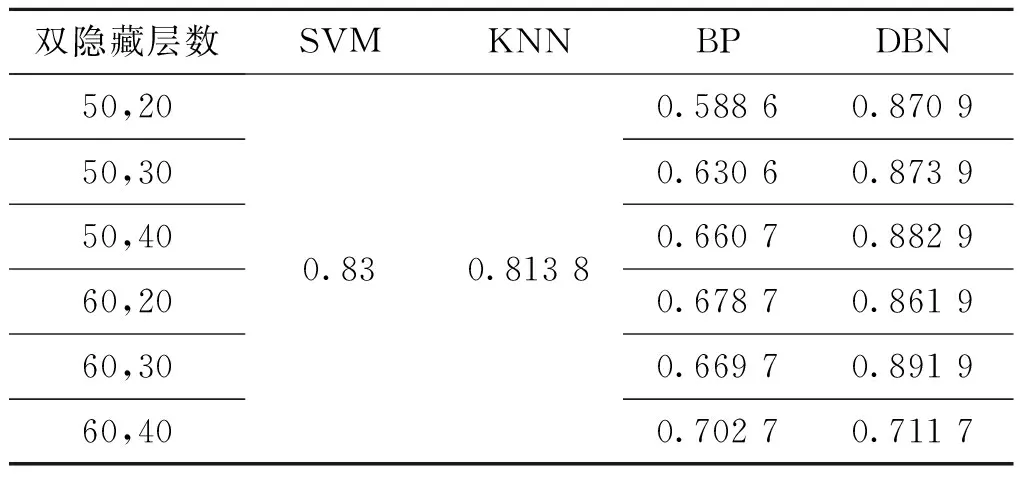
表2 数据集B上四种模型的准确率
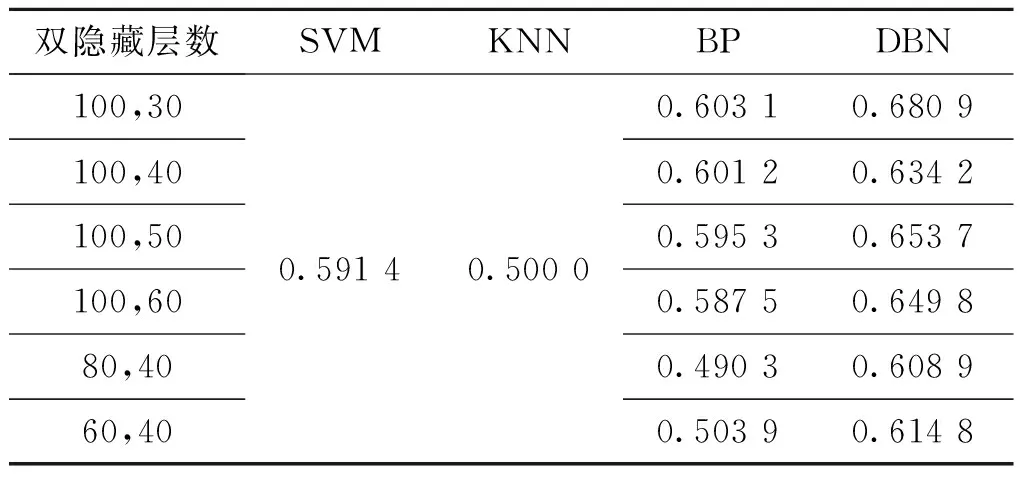
表3 数据集C上四种模型的准确率
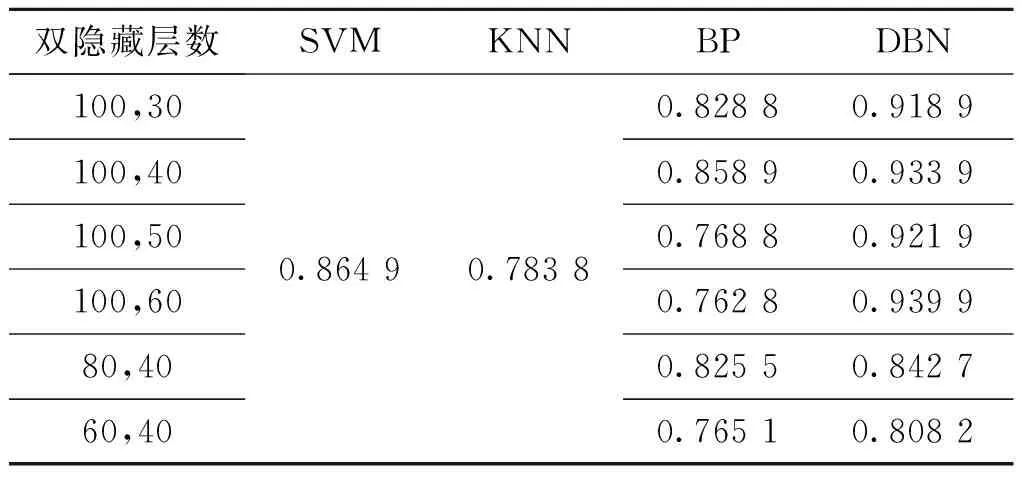
表4 数据集D上四种模型的准确率
通过四组实验可以看出,基于DBN的通信控制设备诊断的准确率一般高于SVM,KNN,BP等传统故障诊断方法的准确率,表现更加优异;通过分别将数据集A和数据集C、数据集B和数据集D进行对比,两者差异在于是否进行了小波变换,可以看出通过小波变换将时域信号转换为频域信号,对原始信号的特征提取有所加强,使得频域数据集的准确率较时域数据集的准确率普遍提高6%。
而分别将数据集A与数据集B、数据集C和数据集D进行对比,两者差异在于删除了速度不一致这一类数据,可以看出前者的准确率明显低于后者。同时可以看出在数据集C条件下进行的实验,神经网络的准确率较SVM和KNN两类模型的准确率相差较大,但是在数据集D和数据集A条件下表现较好。分析其原因在于速度不一致状态下产生的故障数据与正常状态下产生的数据相似度过大,使得神经网络无法准确识别,而经过小波变换后的数据在高维线性空间中区分度变大,使得神经网络的识别准确率有所上升。
实验过程中曾尝试将频域特征和时域特征融合输入至神经网络中进行训练和识别,通过增加特征数量的方法提升神经网络识别的准确率,但是较单纯使用频域特征和时域特征作为输入数据进行网络的训练和识别相比,准确率提升不明显,而由于特征向量维数的增加使得训练时间增加,得不偿失,所以本文没有详细说明列举此类实验。
实验五为在双隐藏层条件下,网络模型对四种自建数据集的训练时间对比,实验结果如表5所示。通过实验五可以看出通过小波变换后的数据集C和数据集D较没有通过小波变换的数据集A和数据集B,网络模型训练所需要的平均时间减少了5 s左右。同时基于深度置信网络故障诊断的所需训练时长为3~5 min,具有一定的实时性。
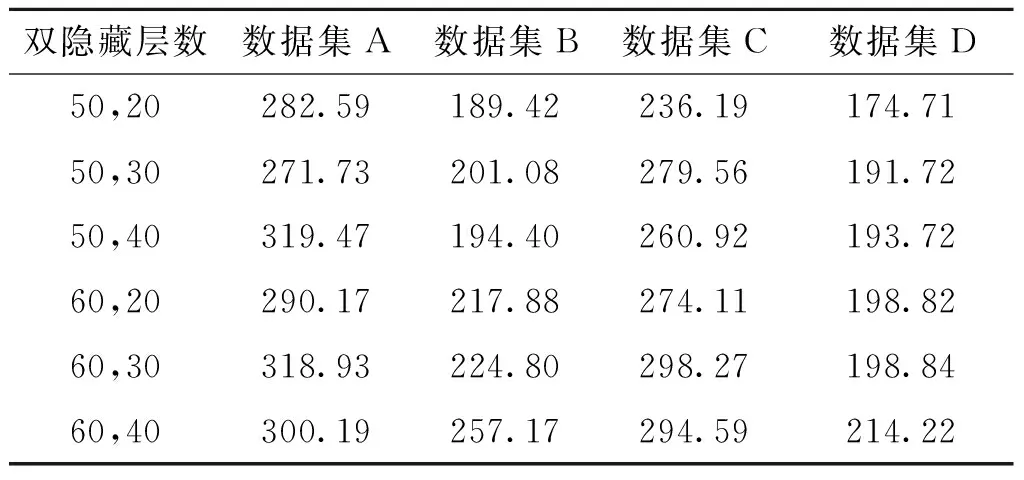
表5 四种数据集的网络训练时间
不可否认的是基于深度置信网络的故障诊断由于更多的参数配置和更复杂的网络结构,其训练时间较传统机器学习的方法所需时间更长。但通过牺牲一定训练时长获取更高的准确率,这种代价对于保证通控机的安全稳定运行是值得的。
4 结论
本文提出了一种基于小波变换和深度置信网络的通信控制设备故障诊断方法。该方法通过采集样本故障数据、分析处理故障数据、输入神经网络进行学习、对测试数据进行识别等步骤,对通信控制设备的远距离传输工作状态进行故障诊断。仿真实验结果表明该方法对通信控制设备故障诊断识别率达到93%,与SVM,KNN,BP神经网络等传统方法相比,具有更高的准确性,表现更好。但是本文只是选取指挥控制系统通信控制机中一类工作状态进行故障诊断,是否可推广至其他武器装备的故障诊断还待进一步研究验证。