基于磁通门技术的转子位置传感器设计
2020-05-14周俊鸿樊志华黄晶晶
周俊鸿,樊志华,黄晶晶,刘 娜
(1.中国矿业大学 电气与动力工程学院,江苏 徐州 221116;2.中国科学院电子学研究所苏州研究院,江苏 苏州 215000)
0 引 言
近年来,永磁同步电机(PMSM)得到了较多的研究,且被广泛应用到各个领域中,并逐渐成为交流调速和伺服领域的主流[1]。在PMSM的闭环控制系统中,电机转子位置信息成为了控制PMSM不可或缺的物理量。近年来,研究人员对无位置传感器检测技术进行了大量的研究。该技术对电机要求高,在低速和零速条件下难以对电机进行控制,普适性不佳,且控制算法复杂,无法保证转子位置估测的准确性[2-3]。故在高性能的PMSM控制系统中,位置传感器仍不可被取代。磁编码器和光电编码器相比,具有结构简单、可靠性高、寿命长等优点,可应用于振动、油污、灰尘等恶劣环境下,尤其在某些特殊领域(比如航空航天)中有着非常重要的地位,发展前景和研究价值很高[4-5]。本文基于磁通门技术设计了一款新颖的转子位置传感器,磁通门传感器是一种灵敏度高、稳定性好、可检测微弱磁场的传感器[6-8],并逐渐向小型化、简单化方向发展[9-14],未来集成磁通门传感器将是霍尔元件和磁阻传感器强大的竞争者[15]。
1 基于磁通门的磁编码器
1.1 磁通门编码器结构
本文设计的磁通门式磁编码器由一个建立空间磁场的辅助永磁体、两个磁通门探头和硬件电路组成,其原理如图1所示。两个磁通门探头在空间位置上相差90°放置于永磁体的上方。硬件系统为磁通门探头提供激励并提取磁通门探头输出信号中的二次谐波信号,转换成与磁场强度成正比的直流电压信号。当辅助永磁体随着电机运行而旋转时,磁通门硬件系统输出两路与旋转角度呈正余弦关系的电压信号,从而检测电机转子位置。

图1 磁通门式磁编码器工作原理图
1.2 磁通门编码器结构
磁通门传感器在结构上分为单铁心结构与双铁心结构,单铁心磁通门输出信号含有大量的与外磁场无关的谐波,而与外磁场有关的谐波含量很小,信噪比小。双铁心结构的磁通门可有效的抑制无用信号,增加有用信号的含量,增强信噪比。本文采用双铁心结磁通门传感器,双铁心磁通门结构示意图如图2所示。

图2 双铁心磁通门结构示意图
图2中,两个铁心的激励线圈匝数相等设为N1,感应线圈匝数为N2,铁心横截面积为S,磁导率为μ。激励线圈通入交流电流,在两个铁心上产生大小相等方向相反的内磁场H1(t),设
H1(t)=Hmsin(2πfext)
(1)
式(1)中,Hm为内磁场H1(t)的幅值。
若无外磁场存在,由法拉第感应定律可知,两个铁心内的交变磁场在感应线圈上产生的感应电压大小相等,方向相反,故无信号输出。
若有外磁场H0存在,此时两铁心内部的磁场分别为:
(2)
若铁心处在周期性的过饱和状态时,铁心的磁导率不再为常数,磁导率的变化如图3所示。

图3 周期性过饱和状态下的铁心磁导率
设周期性过饱和状态下铁心的磁导率为μ(t),式(2)中,H′(t)为一个铁心内部磁场,H″(t)为另一个铁心内部磁场。磁通门传感器感应线圈上的感应电压为
(3)
式(3)中,μ′(t)和μ″(t)分别为两个铁心的磁导率函数。
激励信号产生的磁场方向是周期性变化的,但磁导率没有正负之分,即磁场正反两个方向的激磁产生两次磁导率的变化,故磁导率变化的频率是磁场频率的两倍,为时间上的偶函数,将磁导率按照傅里叶级数展开,如式(4)。
(4)
因为外磁场的存在,使得两个铁心的饱和程度不一致,导致两铁心的磁导率的变化有所差异。将式(1)和式(2)代入式(3),并将μ′(t)和μ″(t)傅里叶展开整理可得:
(5)
(6)
从式(5)中可以看出,外磁场H0与磁通门感应电压的幅值线性正相关,并且根据式(5)傅里叶分解项中可以看出在感应电压中幅度最大的分量即为二次谐波,故本文采用二次谐波法对感应电压中的二次谐波的幅度进行提取从而计算得出外磁场强度。
2 磁通门编码器有限元分析
2.1 磁通门传感器有限元分析
为了验证磁通门传感器的工作原理以及对其特性进行分析,本文利用Ansoft Maxwell仿真软件对双铁心磁通门探头结构进行有限元仿真。为了使双铁心磁通门的铁心采用较少的能量达到饱和,本文选用闭合的环形双铁心磁通门结构。在Ansoft Maxwell仿真软件中建立的磁通门探头结构的二维模型分别如图4所示。

图4 磁通门探头二维模型
图4中,灰色部分为磁通门传感器的铁心部分,铁心材料选用的是高磁导率、低矫顽力的软磁材料带材坡莫合金1J85,铁心薄膜厚度为0.1 mm,宽度为2 mm。本文建立的环形双铁心磁通门长为30 mm,总宽为10 mm,为2 mm。图4中的黄色部分为激励线圈,左右两个铁心激励线圈匝数各为55匝;红色部分为感应线圈,均设置为400匝。为了抑制噪声,感应线圈的匝数和激励线圈的匝数之比不宜过大,线圈的匝数可根据实际情况调整,设置的自由度很大。为了模拟外磁场的存在,模型中添加了产生外磁场的辅助线圈,如图4中的绿色部分所示。
1J85的饱和磁感应强度Br为0.6 T,饱和磁场强度Hr为800 A/m,在环形磁通门结构中,可根据安培环路定律计算铁心达到饱和状态时所施加的电能。
NI=HL
(7)
式(7)中,当铁心达到饱和时,磁场强度H为800 A/m。图4中平均闭合磁路长为72 mm,左右两铁心的激励线圈匝数共为110匝。由此可计算饱和电流Ir约为0.524 A。
2.1.1 铁心周期性饱和
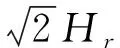
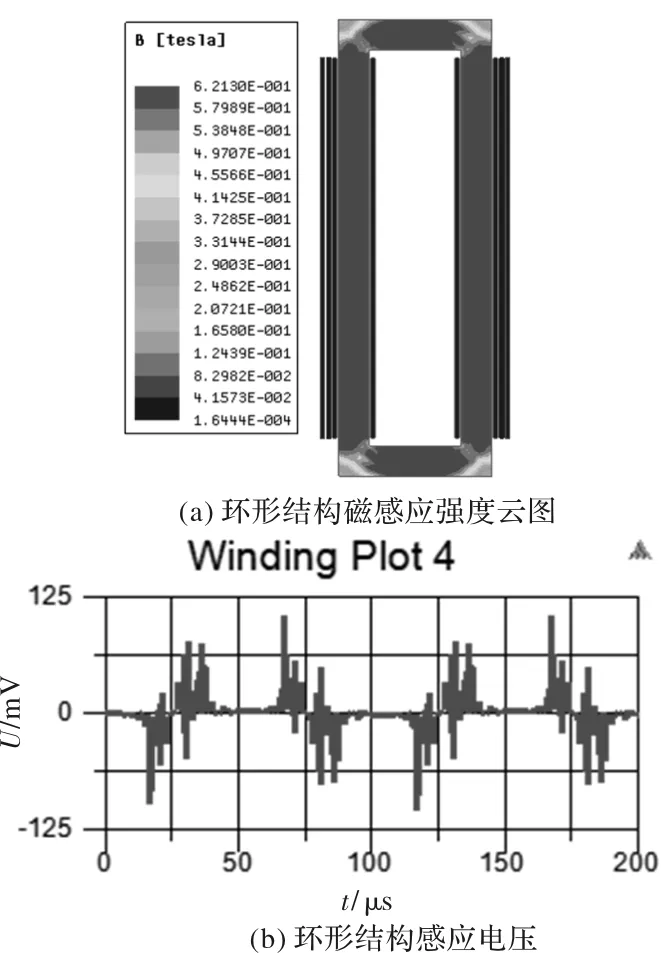
图5 无外磁场时铁心周期性过饱和
给外磁场辅助线圈施加电流激励,模拟外磁场的存在,一般外磁场的大小要小于铁心饱和磁场的大小[18-19]。当沿着Y轴正方向的外磁场的强度为24.8 μT,仿真时间t=2 μs时,磁通门铁心内部磁感应强度云图分别如图6(a)所示。可知,环形磁通门左右两铁心磁场分布不再均匀。当外磁场存在时,在一定的时间范围内,环形磁通门左边铁心磁场方向与外磁场方向相同,其内部磁场与外磁场相互叠加,而右边铁心磁场方向与外磁场方向相反,其内部磁场与外磁场相互抵消,所以左边铁心的磁感应强度大于右边铁心的磁感应强度。铁心内部磁场强度随着时间的变化而变化,导致左边铁心提前进入饱和状态,右边铁心落后于左边铁心进入饱和状态。当激励电流方向变化时,即在铁心内部建立的磁场开始反向,此时会出现右边铁心磁场强度大于左边铁心磁场强度的情况。
在整个仿真时间中,磁通门感应线圈的感应电压分别如图6(b)所示。接下来以一个电源周期(0~100)μs对环形磁通门仿真结果进行分析。由图6(b)可知,仿真时间在(16.5~35.5)μs时间范围内,左右两边铁心开始先后进入饱和状态。铁心的磁导率不再是常量,而是随时间变化的变量,感应线圈产生感应电压。在(35.5~50)μs时间范围内,铁心开始退饱和,感应电压急剧下降至零电压。在50μs处,激励电源的方向开始反向。在(66.5~85.5)μs时间范围内,右左两边的铁心依次进入饱和状态,虽然铁心被反向磁化,但铁心的磁导率是个标量,故感应线圈的感应电压与(16.5~35.5)μs时间内的感应电压一致。
图6 有外磁场时铁心周期性过饱和
由磁通门传感器的数学模型可知,磁通门输出的电压存在大量的谐波。对上述仿真中的感应电压进行谐波分析,结果分别如图6(c)所示。由图6(f)可知,环形磁通门的感应电压均为偶次谐波,没有奇次谐波。无用的奇次谐波相互抵消,偶次谐波相互叠加,进而大大地减少了对有用谐波的提取难度。
2.1.2 环形双铁心磁通门工作特性
确定磁通门探头结构后,对环形双铁心磁通门探头的工作特性进行仿真分析。在上述仿真的基础上,保持外磁场强度不变,改变激励电源的频率,仿真电源频率fex与磁通门输出的关系如图7所示。
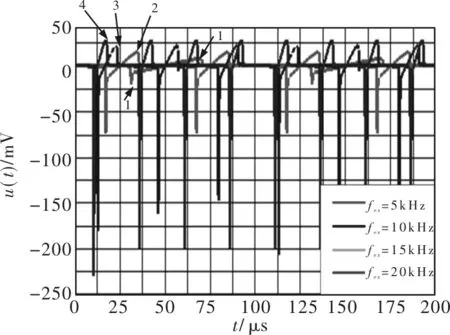
图7 电源频率与感应电压关系
仿真结果表明,感应电压的大小与所施加的电源频率的大小成正比,与理论推导一致。磁通门探头检测磁场的灵敏度和电源频率fex也成正比,所以增大电源频率会增加磁通门传感器的输出电压和灵敏度。实际中,激励信号的频率与铁心中产生涡流的大小成正相关。涡流越大铁心的有效面积越小,即趋肤效应越严重,该情况会影响磁通门信号的输出。经过反复实验,并考虑硬件电路设计难度,最终本文选用频率为10 kHz的激励信号。从以上分析可知,磁通门探头设计的自由度很大。
确定电源频率之后,保持激励电源频率与幅值不变,给外磁场辅助线圈施加不同大小的电流源,建立不同强度的外磁场,磁通门输出电压如图8(a)所示,外磁场强度越大,磁通门输出的电压越大。对这些感应电压进行谐波分析,结果如图8(b)、(c)、(d)、(e)所示,感应电压包含大量的偶次谐波,且不包含奇次谐波,仿真结果和理论推导一致。但实际实验中,由于铁心贴片难以保证完全对称,绕组绕制也有所差异,磁通门输出电压还是会包含大量的奇次谐波。当磁场强度较小的情况下,如图8(b)所示,感应电压中二次谐波和四次谐波含量最大,且四次谐波幅值大于二次谐波;当外磁场强度增加时,二次谐波的含量逐渐增加,如图8(c)、(d)、(e)所示,最终二次谐波含量随着外磁场的增加逐渐大于其它偶次谐波含量。由此可知,二次谐波含量和外磁场的大小成一定的比例关系,故一般提取二次谐波来检测外磁场的大小。
通过仿真得到二次谐波的幅值和外磁场强度关系如图9所示,当外磁场的磁感应强度大于700μT且小于868 μT时,二次谐波的幅值随磁场强度的增加而缓慢增加;当外磁场的磁感应强度大于868 μT时,二次谐波的幅值不再随着外磁场强度的增加而增加,反而有减少的趋势;当外磁场的磁感应强度大于100 μT且小于700 μT时,二次谐波的幅值与磁场强度有较好的线性关系。

图9 二次谐波幅值与外磁场强度关系
2.2 磁源的有限元分析
本文研究了永磁体不同空间位置处的磁场强度分布情况,以确定磁通门探头合适的安装位置。以直径为11 mm、厚度为3.5 mm的圆柱形钕铁硼永磁体为例,在有限元软件Maxwell中建立其3D仿真模型,研究永磁体空间磁场的分布情况。
本仿真中永磁体采用径向充磁方式为永磁体充磁,并定义Y轴正方向为充磁方向。永磁体内部磁感应强度分布云图与磁感应强度矢量图分别如图10(a)、(b)所示。可知,磁场方向沿着Y轴正方向,并向四周发散。距永磁体上表面d=1 mm、半径r=4 mm的圆周处的磁感应强度矢量图如图10(c)所示,可知圆周上的磁感应强度各不相同,有一半的磁场强度方向偏上,一半的磁场强度方向偏下。圆周上沿着Z轴正方向的磁感应强度如图10(d)所示,可知磁感应强度与角度呈正弦关系,且正弦度良好。因此可通过检测此方向的磁场强度辨识永磁体相对于磁传感器的角度位置,进而检测电机转子位置。
通过上节的仿真分析可知,本文设计的磁通门探头可检测的线性磁场强度范围大约为±(100~700) μT。然而图10(d)所示磁场强度幅值明显超过磁通门探头可检测的磁场强度范围。本节接下来分析距永磁体上表面不同位置处的空间磁场分布情况,以便将磁通门探头安装在合适磁场强度位置上。
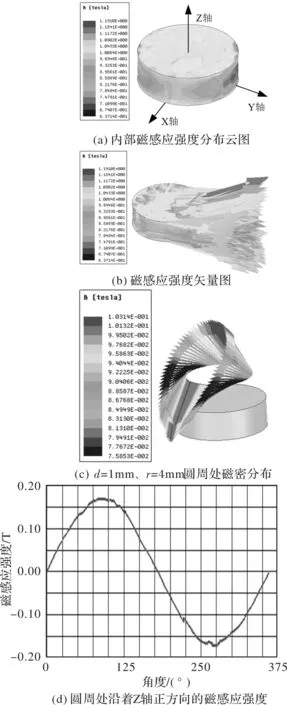
图10 径向充磁磁钢磁感应强度分布图
距离永磁体上表面d=1 mm、不同半径r的圆周上沿着Z轴正方向的磁感应强度如图11(a)所示。本文旨在研究磁通门传感器检测转子位置的方法,对传感器的体积不作研究。本文选择半径r=12 mm的圆周,研究磁通门探头相对永磁体不同轴向距离处的磁感应强度,以便确定轴向安置位置。距永磁体上表面不同距离d、半径r=12 mm圆周处沿着Z轴正方向的磁感应强度如图11(b)所示。根据仿真结果,本设计可将磁通门探头安装在距离永磁体上表面约35 mm、半径约为12 mm的圆周上。
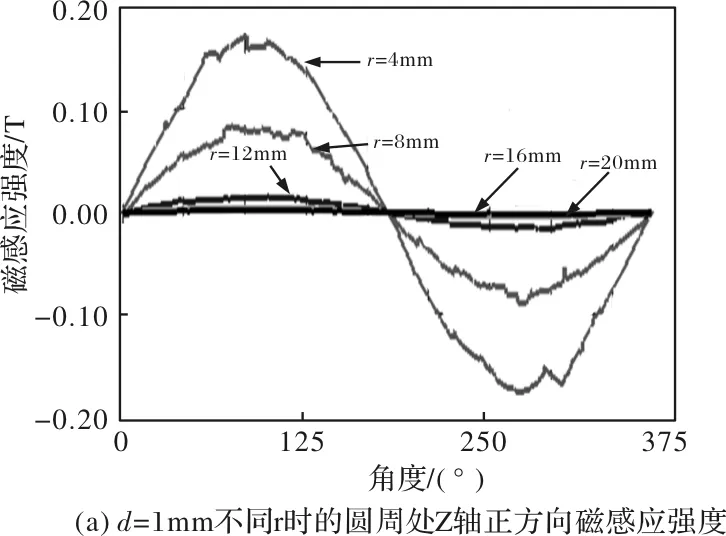
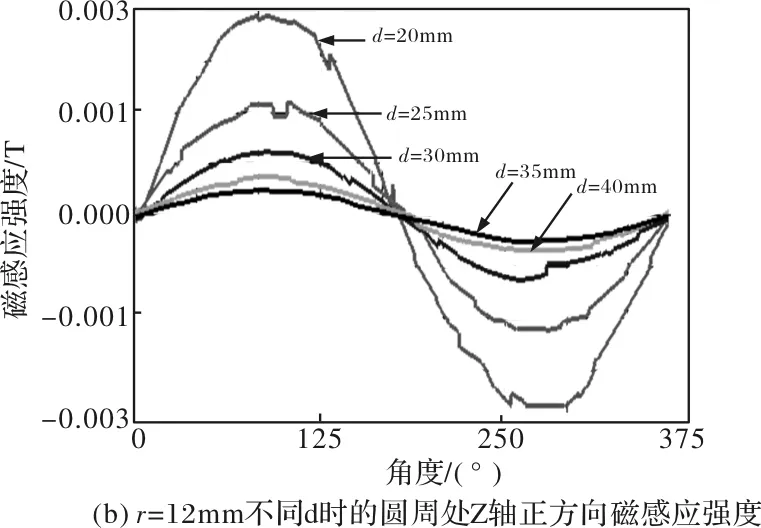
图11 不同空间位置磁感应强度
3 磁通门编码器实验分析
3.1 磁通门传感器的制作
磁通门探头一般包括铁心、线圈和支撑铁心和线圈的骨架。通过对磁通门的工作原理分析可知,磁通门的铁心需要周期性的处在过饱和状态,所以要反复磁化铁心材料,这就要求铁心材料易饱和易退磁。为了减少铁磁材料由于被反复磁化与退磁带来的磁滞损耗,要求铁心具有很小的矫顽力。综上所述,磁通门传感器所用的铁心材料需要具有高磁导率、低矫顽力的特性。本文选用满足上述条件的带材坡莫合金1J85软磁材料,铁心的厚度为0.1 mm,饱和磁感应强度为0.6 T,产品具体的参数如表1所示,铁心材料的实物图如图12所示。

表1 坡莫合金材料属性
带状1J85材料没有足够的物理支撑能力,故需要设计骨架支撑材料。利用Soildworks软件设计的铁心骨架模型如图13(a)所示。铁心骨架长为32 mm,宽为16 mm,厚度为2 mm,凹槽宽为3 mm,深度为0.5 mm。

图12 1J85实物图
将铁心材料1J85进行剪裁,然后贴于铁心骨架的凹槽处,用胶水固定,实物图如图13(b)所示。激励线圈直接缠绕于铁心骨架的两边。为便于感应线圈的缠绕,设计感应线圈绕组骨架,模型和实物图分别如图13(c)、(d)所示。感应线圈绕组骨架与铁心骨架是配套结构,铁心骨架可插入感应线圈绕组骨架的槽中。感应线圈绕组骨架总长为35 mm,宽为25 mm,壁厚2 mm。为了使得缠绕激励线圈后的铁心骨架能够插入到感应线圈绕组骨架的矩形槽中,设计的矩形槽的长和宽均留有一定的裕量,长为17.5 mm,宽为3 mm。铁心骨架与感应线圈绕组骨架均用3D打印机打印,打印耗材选用机械性能与物理性能良好的PLA(聚乳酸)材料。
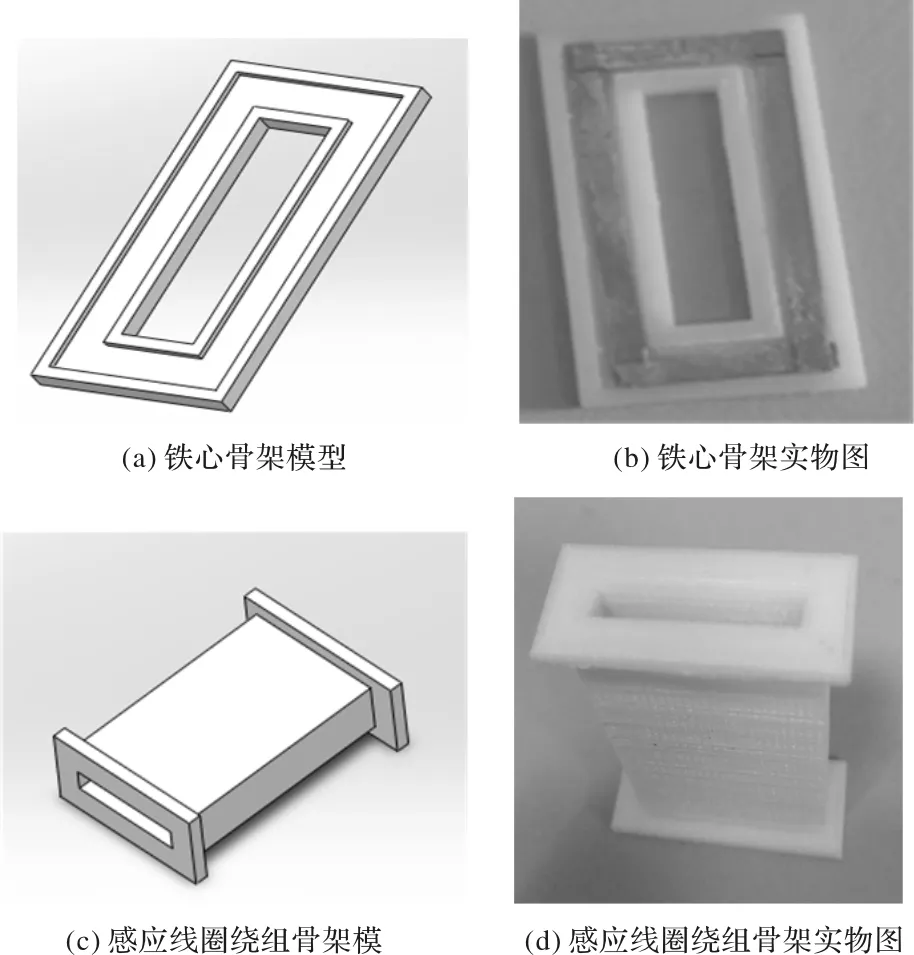
图13 磁通门传感器骨架模型
骨架模型设计完之后,需要在骨架上缠绕激励线圈与感应线圈。激励线圈总匝数为110匝,选用直径为0.29 mm的铜漆包线。感应线圈总匝数为400匝,为便于缠绕,选择直径为0.2 mm的铜漆包线。激励线圈和感应线圈的匝数可根据实际情况进行调整,磁通门探头的实物图如图14所示。
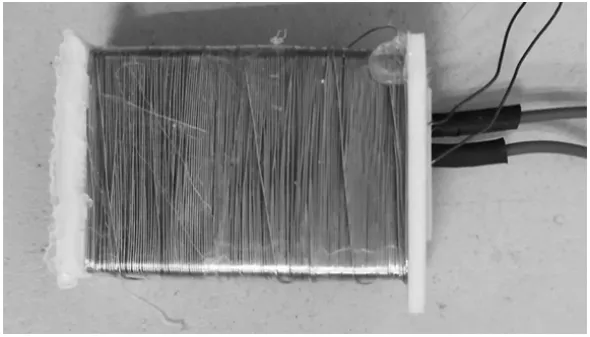
图14 磁通门探头实物图
3.2 磁通门传感器实验分析
在实验阶段,没有将磁通门式磁编码器的辅助永磁体和磁通门探头封装在一起。辅助永磁体固定在转轴上与永磁同步电机同轴连接,两个磁通门探头放在距辅助永磁体合适的位置。本实验中,两个磁通门探头中心点与辅助永磁体中心点的轴向距离约为4 cm,径向距离约为6 mm。在电机控制板上采用VF控制方式控制电机空载运行。当电机转速为500 r/min时,磁通门硬件电路输出信号VPh1和VPh2的波形如图15(a)所示,为正余弦信号。保存示波器数据,在Matlab软件中进行信号处理,将信号进行幅值归一化并去除直流偏置,利用atan2函数求解角度,结果如图15(b)所示。可知,磁通门硬件电路输出信号的正弦度以及所求解角度的线性度均良好。

图15 电机转速为500r/min时磁通门输出信号与角度波形
为便于信号处理,本文采用DSP自带的AD模块对磁通门硬件输出信号进行采样。磁通门硬件电路输出信号VPh1和VPh2的幅值和直流分量的偏差既可通过硬件电路调节,也可通过软件调节。为便于观察波形,使用DA模块将AD采样后的数字信号转换成模拟信号后用示波器观察,如图16所示。AD采样后的波形如图16(a)所示,可知两个信号存在幅值和直流分量的偏差,将信号进行幅值归一化处理并去除直流分量后的波形如图16(b)所示,求解的角度波形如图16(c)所示。由图16(c)可知,角度波形的线性度良好。

图16 信号处理与角度求解
当电机转速为500 r/min、1000 r/min、1500 r/min、2000 r/min时,经磁通门探头检测的电机角度分别如图17(a)、图17(b)、图17(c)、图17(d)所示。可知,转速越高,基于磁通门传感器检测的电机转子位置线性度越差,误差越大。这是因为磁通门探头的激励频率是固定的,且不能无限制的增加,故其检测变化的磁场的频率也是有限制的。本文通入磁通门探头的激励频率为10 kHz,当转速为500 r/min时,辅助永磁体磁场的变化频率为33.33 Hz,激励频率是磁场变化频率的300倍;当转速为2000 r/min时,激励频率是磁场变化频率的75倍。可见,转速越高磁场变化频率越快,磁通门位置传感器的检测精度越差。

图17 不同转速下角度波形
通过上述实验可知,磁通门式磁编码器角度输出稳定,线性度良好。在中高速场合,可通过适当的增加磁通门探头激励源的频率提高其速度检测范围。
4 结 语
本文设计并实现了一款基于磁通门技术的新颖磁编码器,并通过有限元仿真说明了磁通门传感器工作原理,并根据仿真结果选择了适宜磁编码器的磁通门铁心结构;此外本文还对磁源的设计进行了详细的分析,对两种充磁方式的辅助永磁体进行空间磁场分布研究,进而找出磁通门探头合适的安装位置。最后通过实验证明本文所设计基于磁通门的磁编码器的可行性,并通过基于id=0的电机控制实验证明了本文所设计磁编码器的实用性。本文所制作的磁通门传感器制作较为粗糙,但依然能良好的完成工作,故磁通门编码器具有非常好的抗干扰性,本文对未来位置传感器设计提供了思路,具有良好的参考价值。