基于全阶状态滑模观测器的混合永磁记忆电机磁链观测
2020-05-13姜晓奇刘维亭魏海峰
姜晓奇 , 刘维亭, 魏海峰 , 张 懿
基于全阶状态滑模观测器的混合永磁记忆电机磁链观测
姜晓奇1,2, 刘维亭1, 魏海峰1,2, 张 懿1,2
(1. 江苏科技大学 电子信息学院, 江苏 镇江, 212003; 2. 常熟瑞特电气股份有限公司, 江苏 苏州, 215500)
由于混合永磁记忆电机(HPMMM)永磁体在线充磁与去磁时转子磁链定向难度大, 针对HPMMM永磁体在线调磁时磁链观测精度不高的问题, 提出了一种基于全阶状态滑模观测器的混合磁链观测方法。该方法采用全阶磁链观测器并结合滑模反馈部分保证电流观测值收敛于真实值, 同时对HPMMM定子电流与转子磁链实时观测,进而获得更高精度的转子磁链观测。全阶状态滑膜观测器应用于HPMMM矢量控制策略中, 优化了系统整体控制复杂程度。最后通过仿真对比分析, 相比传统永磁同步电机而言, HPMMM调速范围更宽, 交直轴电流波动较小, 收敛于实际磁链速度更快, 表明该方法能进一步提高交流脉冲对HPMMM充磁和去磁时磁场定向的准确性, 增加系统参数鲁棒性、稳定性。
混合永磁记忆电机; 在线调磁; 全阶状态滑模观测器; 滑模反馈; 磁场定向
0 引言
近年来, 我国对海洋开发与海洋安全重视程度不断上升, 水下无人智能装置的研究成为当前热点。在水下电力推进装置中, 对水下特种推进电机选择要求更高, 混合永磁记忆电机(hybrid permanent magnet memory machine, HPMMM)采用钕铁硼和铝镍钴混合励磁, 既具有转矩和功率密度高的优点, 又具有永磁磁通在线可调的特点, 可满足水下复杂环境中对水下航行动力的需求[1-3]。HPMMM定子与传统永磁同步电机(permanent magnet synchronous motor, PMSM)相同, 转子利用铝镍钴永磁体的高剩磁、低矫顽力特性。在三相定子电枢绕组中输入一个特定脉冲电流, 使得转子中产生一个能够瞬间改变铝镍钴永磁体磁化水平的强磁场, 达到改变气隙磁场的目的[4-6]。由于海洋环境恶劣, 为保障水下HPMMM在推进与控制系统稳定运行, 对HPMMM精准控制的研究受到越来越多关注。
为了更加精确地控制电机, 实现气隙磁场的调节, 减少电励磁损耗, 简单高效地实现在线调磁, 解决调速范围受限问题, 国内外研究者提出采用具有高矫顽力特性的钕铁硼与具有高剩磁特性的铝镍钴相结合, 作为HPMMM的永磁体, 再施加脉冲电流进行调磁[7-8]。这种特殊结构转子可对永磁体进行在线充去磁, 而且几乎没有励磁损耗。但气隙磁通的检测与调节难度较大, 对HPMMM施加调磁脉冲来控制气隙磁通的关键在于转子磁链定向识别的问题[9-11]。吴文进等[12]在同步旋转坐标系下采用全阶磁链观测器估算电机定子电流和转子磁链, 并采用欧拉法进行离散化分析来克服离散化误差大的缺点, 但该算法在线辨识磁链精度不高。蒋林等[13]提出一种模糊自适应控制全阶磁链观测算法, 仿真结果表明在满足系统自适应性和鲁棒性条件下提高了转速辨识精度, 不过仅限于低速范围稳定运行, 中高速范围运行缺乏进一步验证。针对系统高鲁棒性与宽范围调速, 车海军等[14]引入3阶巴特沃思滤波器并采取改进的模糊比例积分(proportional integral, PI)代替之前的控制器, 消除掉输入信号的杂质, 提高转速在线辨识精度; 韦文祥等[15]将闭环转子磁链观测器(closed loop extended-state- observer, CESO)模型中不确定部分进行状态扩展并反馈补偿, 能在大范围内进行调速, 在线辨识磁链, 但以上2种方案对电机参数要求较高, 系统鲁棒性不高, 不能满足水下复杂条件对推进电机的需求。杨公德等[16]对混合永磁磁通切换记忆电机采用分区控制, 低、高速区采用不同控制方式, 虽拓宽了电机调速范围, 但控制方式过于复杂, 对高、低速没有明确区分, 实用性不强。
文中针对HPMMM分析其调磁原理并推导电磁性数学模型, 提出了一种适用于水下电力推进与控制的新型观测算法。该算法基于观测精度较高的全阶磁链观测器并结合鲁棒性较强的滑模反馈环节, 实现在线调磁, 使电机的磁链观测具有更好的稳态性和收敛性, 优化了HPMMM负载突变时系统动态稳定性。最后, 采用Matlab/ Simulink对磁链观测系统进行仿真研究与分析, 验证了该方法的可行性和实用性。
1 HPMMM调磁原理
HPMMM的永磁体采用6极的V形结构, 如图1所示, 该结构对聚磁有明显作用, 在中间气隙部分可得到较大的磁场。
采用相对保留时间值(待测成分与内参物保留时间之比)对KC中各待测成分色谱峰进行定位,以金丝桃苷的保留时间计算朝藿定B、朝藿定A、朝藿定C、淫羊藿苷、木犀草素、槲皮素、川陈皮素、山柰酚、宝藿苷I的相对保留时间,各成分的相对保留时间分别为1.212 0、1.259 3、1.291 3、1.392 5、2.093 6、2.195 6、2.769 9、3.091 3、3.417 7;各成分的RSD值分别为0.27%、0.31%、0.34%、0.37%、0.30%、1.03%、0.32%、0.28%、0.29%,相对保留时间规定值RSD在5%范围之内,表明相对稳定,可用于色谱峰的定位。

图1 HPMMM结构
HPMMM永磁体中采用隔磁桥增大了交轴方向磁阻, 减小了交轴方向电感, 使电机运行中直轴方向的气隙磁场受交轴方向电枢反应而被极大削弱。当施加正向调磁脉冲电流时, 铝镍钴和钕铁硼混合永磁体会共同作用, 最终将混合磁通推向三相绕组, 使得产生的气隙主磁通得到加强; 施加反向调磁脉冲电流时, 铝镍钴和钕铁硼混合永磁体会共同作用, 最终将混合磁通推向永磁体内部, 削弱内部磁场, 达到弱磁的目的。
图2为HPMMM驱动控制系统原理框图。根据光电编码器与速度PI环得出电机速度反馈需求, 调磁电流分配控制器与可控调磁电流变量作用于调磁电流控制器。调磁电流控制器与调磁电流变换器共同对调磁电流进行控制与调节, 产生可控调磁电流变量, 实现了在线调磁的目的, 增强了系统灵活性。
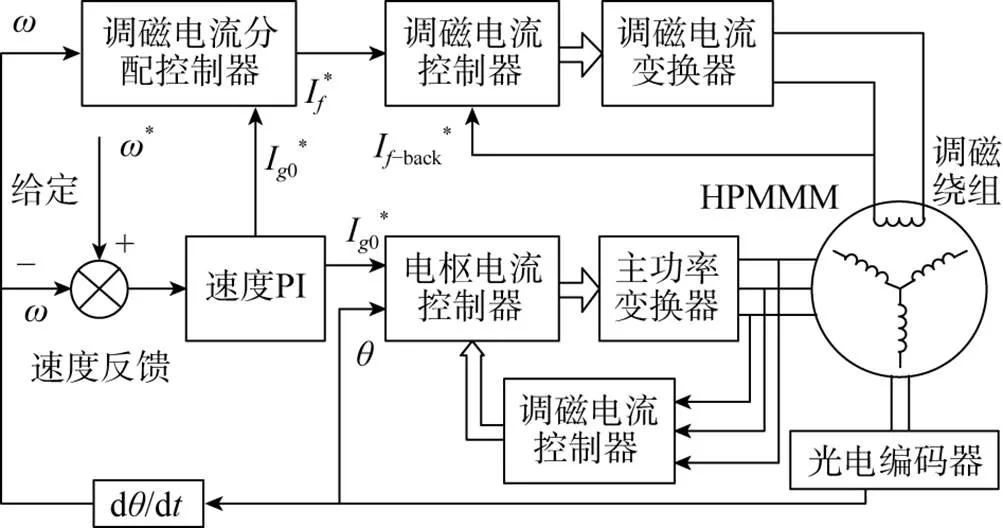
图2 HPMMM调磁原理框图
2 HPMMM数学模型

根据广义滑模可达条件定义李亚普诺夫函数为
磁链方程

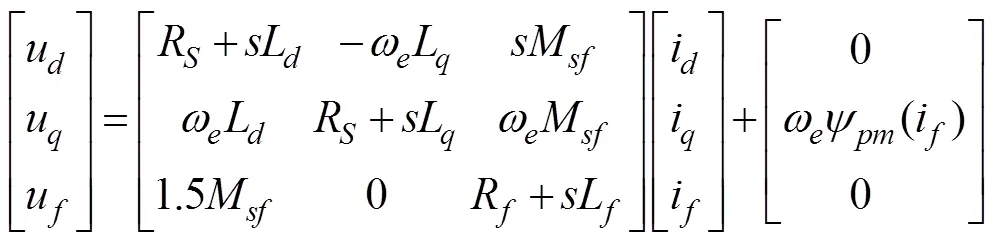
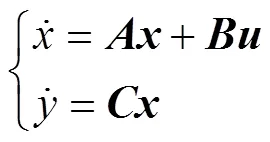
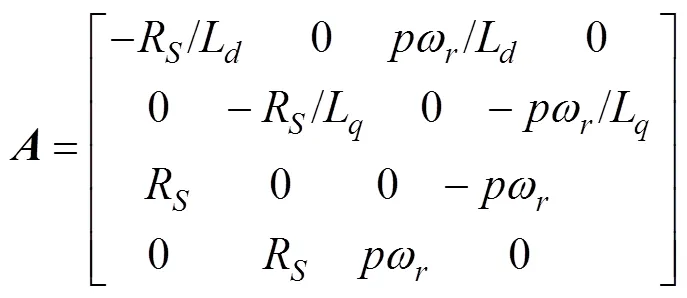
当调磁脉冲消失后, HPMMM可以等效为一台传统PMSM, 此时得到旋转坐标系下状态方程
(1)虚拟水战略对水资源消费的影响。通过实施虚拟水战略可以减少新疆的农业用水量,情景B对棉花水资源消费影响最大,提高单产后2020年与2025年棉花水资源消费分别减少62. 23亿m3、72. 21亿m3,情景E对种植业水资源消费影响最大,调整种植业结构与采用高效节水技术后2020年与2025年种植业水资源消费分别减少87. 52亿m3、115亿m3。
3 全阶状态滑模观测器
3.1 全阶状态磁链观测器
法军重振精神,1914年9月8日,新增援军投入全线战斗。9月9日,德军开始动摇、败退。出租车司机们苦战两天两夜。在加利埃尼的指挥下,他们奋勇前进,终于在石油的参与下拯救了巴黎。

式中, 系数为反馈增益矩阵。对的选取, 一方面需保证观测值的收敛足够快; 另一方面, 需尽量让系统构造简单, 减小算法复杂程度; 符号“^”代表估计值。选择系数
真是呆子!有啥法?他早就是猪八戒了,我可得见机行事。于是,我搬把椅子坐到窗前,巴克夏把灯关了,坐在椅背上,挽挽袖子,露出跃跃欲试的架式。
(五)能力素质不够过硬。从运行情况看,虽然多数同志工作热情很高,经常加班加点,但工作难推动、效率比较低、质量不够高的现象还不同程度存在,主要原因是自身能力素质不够过硬,与新体制新任务不相适应。有的能力提升不快,缺乏本领恐慌意识,满足于“差不多”“过得去”,吃老本、凭经验,对新知识新技能学习不够,对新标准新要求掌握不多,跟不上形势,打不开思路。有的业务素质不够全面,缺乏一专多能,尤其是新交流到省军区的干部,来源多样、成分复杂、素质各异,大都是国防动员工作的“新手”,实践经验相对不足,短期内难以打开工作局面,等等。

计算得到
3.2 全阶状态滑模磁链观测器
为了进一步增强全阶磁链观测器对检测变量变化的敏感程度, 选择将滑模观测器的滑模反馈融入其中, 形成新型全阶磁链观测器, 提高了全阶状态滑模观测器对检测参数的敏感度和鲁棒性。
根据式(3)状态方程以及相关观测器知识, 对定子电流观测值和实际值进行比较, 构造出全阶状态观测器为
对Abaqus中的经典库伦摩擦模型进行了研究和模拟,证实了Abaqus的经典库伦摩擦模型可以很好地模拟树根拔出的前峰值阶段和峰值阶段,然而基本不能对后峰值阶段进行修正[5]。
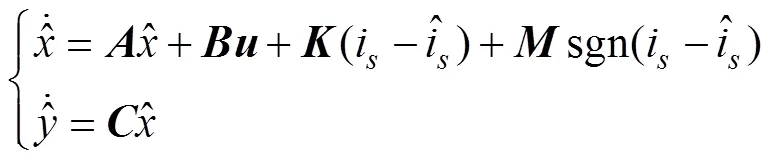
全阶状态滑模观测器构建为
从中央、省委到地方巡视组在巡视反馈意见中不难发现,个别职业院校党委对意识形态工作思想上不够重视,对当前意识形态领域斗争的复杂性认知不足,敏锐性不够,工作责任制落实不到位。有的院校认为意识形态工作比较“虚”,想要抓却不知从何抓起,想要落在实处又欠缺工作经验,片面认为宣传部门牵头主抓这项工作就可以了,没有摆到学校全局去谋划,缺少专题研究和专项工作部署。
可得出转子磁链观测值为
对于全阶滑模观测器系统, 式(8)可改写为

在保证剪叶器工作效率不低于120盘/h,即表中时间不高于30s的情况下,集叶率最高的为效果最好的,其R值即为设计的参考数据。从表1中看出,选定的R值应为82mm。
电压方程

高潮摸了摸自己的包,心里说,吴限的手机在这里呢,老子是双枪。干这个摆不到桌面上的勾当,不能像狡猾的兔子一样有仨窝,也总得准备俩吧?
为全面深入地考核田陈煤矿选煤厂两段浓缩、两段回收工艺,于2012年1月5日进行了工业性试验。浮选尾煤和中煤、矸石磁选机尾矿是尾煤泥系统的入料,其粒度组成见表1。
用式(11)与式(10)相减, 得到估算电流误差的动态方程


综上所述, 可得全阶状态滑模观测器结构框图如图3所示。HPMMM永磁磁链观测器法利用电压、电流及转速信号可在线观测永磁磁链, 有利于达到控制电机在线调磁的目的。
4 仿真结果与分析
为了验证文中提出的全阶状态滑模磁链观测器对HPMMM磁链观测精度高, 系统鲁棒性强的控制效果。根据HPMMM的特点构造含有全阶滑模磁链观测器的控制系统。基于Matlab/Simulink仿真搭建了含有全阶状态滑模磁链观测器的控制系统模型, 系统整体仿真模型框图如图4所示。
①术语词汇不熟悉:观看杂技表演时,一位剧团领导介绍道:“我们的孩子都练童子功,有的从3、4岁就开始翻跟头、下腰、劈叉了。”因为是现场临时的发言,笔者对此并未提前准备,翻译“童子功”时采用了解释说明的方式,译为skills trained from a young age,将“翻跟头、下腰、劈叉”概括译为some professional and difficult actions.
选择HPMMM与传统PMSM进行对比, 初始参数配置相同, 其定子三相均为Y接, HPMMM设定参数如表1所示。为验证文中提出的采用全阶状态滑模观测器算法的可行性与稳定性, 对传统PMSM与HPMMM系统进行仿真, 并且对结果进行分析比较。
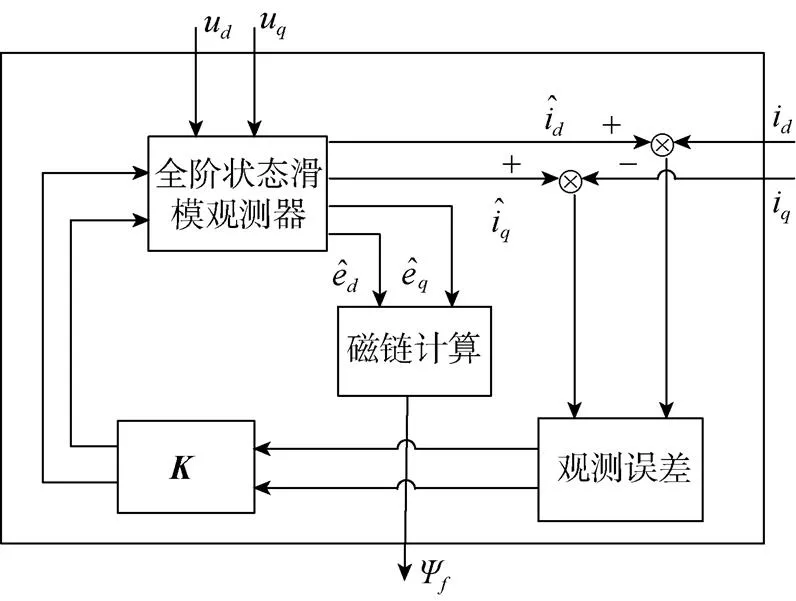
图3 全阶状态滑模磁链观测器结构图

图4 系统整体仿真模型框图
4.1 仿真结果
传统PMSM初始给定负载设置为0 N·m, 由静止起动到额定转速1 000 r/min后, 在0.2 s时刻给定负载突变为10 N·m 时, 经过约60 ms波动后, 进入稳态运行状态。图5为该电机在0.2 s突加负载后的运行特性曲线。


HPMMM电机设定从静止起动至额定转速1 000 r/min启动负载为2 N·m。稳定运行后, 在0.15 s时转速给定值突变为1 200 r/min, 在系统进入稳态运行后。在0.3s时, 电机转速给定值再次突变为1 000 r/min, 电机转速立刻下降到额定转速, 系统再次进入稳态运行状态。系统仿真结果如图6所示。

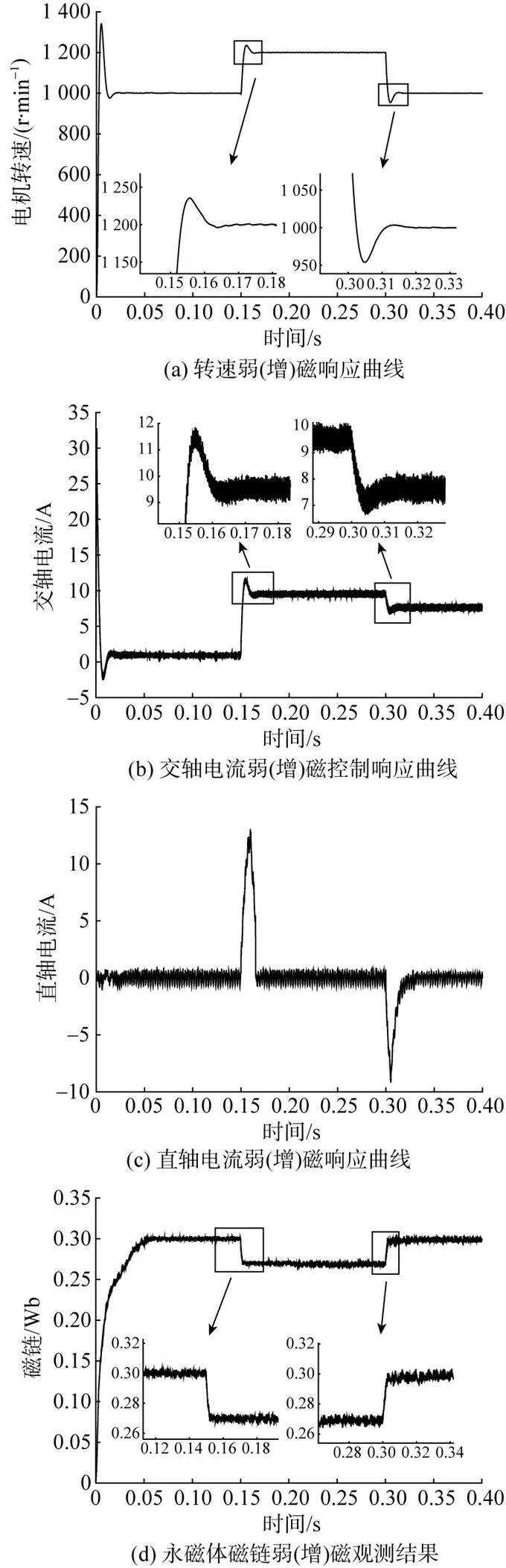
图6 电机转速突变运行特性曲线
4.2 仿真对比分析
由上述仿真结果可知, 采用全阶状态滑模观测器辨识HPMMM转速、交直轴电流和永磁体磁链参数, 与传统PMSM辨识所得参数进行对比。在电机启动后, HPMMM转速收敛速度更快; 在稳定运行中, 可对其进行突加负载, 由直轴电流方向发出调磁脉冲, 改变永磁体中铝镍钴部分磁化水平, 达到调磁目的, 并且交直轴电流波动更小, 系统更稳定; 在调磁后, 观测器能快速收敛于变化后的磁链, 可得出系统鲁棒性更好。
5 结束语
基于混合永磁磁链在线可调特性, 提出了全阶状态滑模观测的控制策略。HPMMM用作水下特种推进电机时, 具有高稳定动力性能、宽范围调速。为了验证所提出策略的有效性, 通过仿真结果分析可知, 该观测器满足永磁体磁链在线调节性能, 具有更高精度的磁链观测, 控制稳定性更好。在水下电力推进与控制中, HPMMM的在线调磁法使电机获得更宽的恒功率速度范围, 并且在调磁过程中几乎没有调磁损耗, 提高了电机运行效率、减小能源消耗。
采用全阶状态滑模观测器, 引入滑模反馈部分, 使电流观测值更快收敛于真实值, 估测结果精度较高, 能在短时间内完成动态响应, 反映出观测器具有较好的抗干扰能力。在线实时观测永磁体磁链, 有利于判断HPMMM的调磁过程。
但是, 文中电机控制局限于仿真, 实际中通过施加脉冲电流调节永磁体磁化水平的策略, 可能会对系统造成明显抖动, 并且会对电机绝缘有所影响, 后续工作中可对其进行深入分析研究。
[1] 王秀和.永磁电机[M]. 北京: 中国电力出版社, 2011: 18-20.
[2] 张林森, 徐海珠, 王松林. 一种新型水下推进用双转子永磁电机及其研究现状[J]. 鱼雷技术, 2013, 21(6): 445-449. Zhang Lin-sen, Xu Hai-zhu, Wang Song-lin. The New Type of Dual-rotor Permanent Magnet Motor for Underwater Propulsion: a Review[J]. Torpedo Technology, 2013, 21(6): 445-449.
[3] 李宏, 张鹏举. 双三相电机感应电机矢量控制研究[J]. 鱼雷技术, 2016, 24(5): 351-356. Li Hong, Zhang Peng-ju. Vector Control of Dual Three-Phase Induction Motor[J]. Torpedo Technology, 2016, 24(5): 351-356.
[4] 周裕斌, 陈阳生. 一种混合永磁记忆电机的设计[J]. 电工技术学报, 2015, 30(14): 51-60. Zhou Yu-bin, Chen Yang-sheng. Design of a Hybrid Permanent Magnet Memory Motor[J]. Transactions of China Electrotechnical Society, 2015, 30(14): 51-60.
[5] Ostovic V.Memory motors[J]. IEEE Industry Transactions on Industry Applications, 2003, 9(1): 52-61.
[6] 林明耀, 杨公德, 李念. 混合永磁记忆电机系统及其关键技术综述[J]. 中国电机工程学报, 2018, 38(4): 1187-1202. Lin Ming-yao, Yang Gong-de, Li Nian. Overview of Hybrid Permanent Magnet Memory Machine Systems and Their Key Technologies[J]. Proceedings of the CSEE, 2018, 38(4): 1187-1202.
[7] 壮而行, 阳辉. 磁通切换型记忆电机控制策略研究[J]. 微特电机, 2016, 44(10): 4-10. Zhuang Er-xing, Yang Hui. Research on Control Strategy of Flux Switching Memory Machine[J]. Micro Motor, 2016, 44(10): 4-10.
[8] 朱孝勇, 程明, 赵文祥. 混合励磁电机技术综述与发展展望[J]. 电工技术学报, 2008, 23(1): 30-39. Zhu Xiao-yong, Cheng Ming, Zhao Wen-xiang. An Overview of Hybrid Excited Electric Machine Capable of Field Control[J]. Transactions of China Electrotechnical Society, 2008, 23(1): 30-39.
[9] 林鹤云, 刘恒川, 黄允凯. 混合永磁记忆电机特性分析和实验研究[J]. 中国电机工程学报, 2011, 31(36): 71-76. Lin He-yun, Liu Heng-chuan, Huang Yun-kai. Characteristic Analysis and Experimental Study of a Hybrid Permanent Magnet Variable Flux Memory Motor[J]. Proceedings of the CSEE, 2011, 31(36): 71-76.
[10] 王高林, 陈伟, 杨荣峰. 无速度传感器感应电机改进转子磁链观测器[J]. 电机与控制学报, 2009, 13(5): 638- 642. Wang Gao-lin, Chen Wei, Yang Rong-feng. Improved Rotor Flux Estimator for Sensor Less Induction Motor[J]. Lectric Machines and Control, 2009, 13(5): 638-642.
[11] 赵武玲, 魏振, 姚广. 永磁同步电动机全阶状态观测器的设计及分析[J]. 微特电机, 2019, 47(1): 20-24. Zhao Wu-lin,Wei Zhen, Yao Guang. Design and Analysis of Full-Order State Observer on Permanent Magnet Synchronous Motor[J]. Micro Motor, 2019, 47(1): 20-24.
[12] 吴文进, 苏建徽, 刘鹏. 感应电机全阶磁链观测器设计及其控制性能对比分析[J]. 电机与控制学报, 2016, 20(4): 78-83. Wu Wen-jin, Su Jian-hui, Liu Peng. Design of Full-Order Flux Observer and Comparision Analysis for Its Control Performance[J]. Lectric Machines and Control, 2016, 20(4): 78-83.
[13] 蒋林, 吴俊, 邱存勇. 感应电机模糊自适应全阶磁链观测器研究[J]. 控制工程, 2016, 23(6): 858-863. Jiang Lin, Wu Jun, Qiu Cun-yong. Study on Fuzzy Adaptive Full-Order Flux Observer for Induction Motor[J]. Control Engineering of China, 2016, 23(6): 858-863.
[14] 车海军, 王亮亮, 霍丽娇. 改进的无功功率模型参考自适应异步电机转速辨识[J]. 电机与控制学报, 2017, 21(10): 40-46, 53.
Che Hai-jun, Wang Liang-liang, Huo Li-jiao. Improved Reactive Power Model Reference Adaptive Speed Identification Applying to Induction Motor[J]. Lectric Machines and Control, 2017, 21(10): 40-46, 53.
[15] 韦文祥, 刘国荣. 基于CESO磁链观测器的模型参考自适应感应电机转速辨识[J]. 电机与控制学报, 2016, 20(4): 57-63. Wei Wen-Xiang, Liu Guo-Rong. Speed Identification for Induction Motor Based on CESO Flux Observer and MRAS[J]. Lectric Machines and Control, 2016, 20(4): 57-63.
[16] 杨公德, 林明耀, 李念. 混合永磁轴向磁场磁通切换记忆电机分段弱磁控制[J]. 中国电机工程学报, 2017, 37(22): 116-125, 326. Yang Gong-de, Lin Ming-yao, Li Nian. Flux-Weakening Stage Control of Hybrid Permanent Magnet Axial Field Flux-Switching Memory Machines[J]. Proceedings of the CSEE, 2017, 37(22): 116-125, 326.
Flux Linkage Observation of Hybrid Permanent Magnet Memory Machine Based on Full-Order State Sliding Mode Observer
JIANG Xiao-qi1,2, LIU Wei-ting1, WEI Hai-feng1,2, ZHANG Yi1,2
(1. School of Electronics and Information, Jiangsu University of Science and Technology, Zhenjiang 212003, China; 2. Changshu Ruite Electric Co., Ltd, Suzhou 215500, China)
To improve the accuracy of flux linkage observation in on-line tuning of the hybrid permanent magnet memory machine(HPMMM), a hybrid flux linkage observation method of full-order state sliding mode observer is proposed. This method combines a full-order flux linkage observer with the feedback part of the sliding mode to ensure that the current observation converges to the true value. The HPMMM stator current and rotor flux linkage are observed in real time, and the rotor flux linkage observation is obtained with higher precision. The full-order sliding mode observer is applied to the vector control strategy of HPMMM for optimizing the overall control complexity of the system. Simulation shows that, compared with the traditional permanent magnet synchronous motor(PMSM), HPMMM has a wider speed range, smaller direct-axis and quadrature-axis current fluctuation, and faster speed of convergence to actual flux linkage, indicating that the proposed method can further improve the accuracy of the magnetic field orientation by AC pulse during magnetization and demagnetization of HPMMM and enhance the robustness and stability of the system parameters.
hybrid permanent magnet memory machine(HPMMM); on-line flux tuning; full-order state sliding mode observer; sliding mode feedback; magnetic field orientation
TJ630.1;TM351
A
2096-3920(2020)02-0194-08
10.11993/j.issn.2096-3920.2020.02.012
2019-09-13;
2019-10-16.
国家自然科学基金项目(51977101); 江苏省省重点研发计划产业前瞻与共性关键技术重点项目(BE2018007); 江苏省研究生科研与实践创新计划项目资助.
姜晓奇(1994-), 男, 在读硕士, 主要研究方向为电气传动控制.
姜晓奇, 刘维亭, 魏海峰, 等. 基于全阶状态滑模观测器的混合永磁记忆电机磁链观测[J]. 水下无人系统学报, 2020, 28(2): 194-201.
(责任编辑: 许 妍)
