无人水下发射试验设施方案设计构想
2020-05-13宋杰
宋 杰
无人水下发射试验设施方案设计构想
宋 杰
(中国人民解放军91550部队, 辽宁 大连, 116023)
为考核水下发射技术并有效规避水下发射航行器的试验风险, 发展无人水下发射试验设施已成为开展水下发射技术研究的重要技术途径。文中在借鉴国外试验设施设计思路的基础上, 根据任务需求提出了锚泊式、桩腿自升式和沉箱式3种海上无人水下发射试验设施方案设计构想, 分别简述了系统组成和功能、系统工作原理以及工作过程。3种方案均基于真实的海洋环境条件, 较为逼真地模拟了真实的水下发射平台发射条件; 采用无人值守方式以保证方案的安全性; 并借鉴船舶、潜艇和海上平台设计等成熟技术增加了试验设施设计方案的可行性。最后从技术难点、组织实施和逼真程度等方面对3种方案进行了比较分析。分析结果可知, 从海洋环境要素、组织实施、维护保养及技术实现难度等方面来看, 3种方案均可满足航行器水下发射和测试需求, 其中锚泊式发射平台方案最具优势。
无人水下发射试验设施; 锚泊式;测试
0 引言
各国工程实践表明, 水下发射技术作为水下发射航行器研制的核心技术, 是公认的世界难题。直接在真实水下发射平台上开展水下发射技术研究将使人员和装备承受较大的安全风险, 同时受真实水下发射平台安装空间限制, 能够获取的试验数据有限, 因此发展无人水下发射试验设施是研究水下发射技术的重要技术途径。
美国、俄罗斯、法国等国都十分重视水下试验设施的建设, 均建造了全尺寸的试验设施, 但相关方案设计研究的报道较少。文献[1]介绍了美国2种试验设施的主要用途, 但未涉及系统组成等内容; 文献[2]对美国和法国的相关试验设施进行了综述, 但只介绍了设施的系统组成; 文献[3]介绍了美国拖曳式水下发射试验平台的工作原理和系统组成, 但该平台仍属于美国早期的试验平台。基于此, 文中在借鉴国外试验设施设计思路的基础上, 采用航天、船舶、潜艇和海上平台设计与建造等成熟技术[4-7], 提出了锚泊式、桩腿自升式和沉箱式3种无人水下发射试验设施设计构想, 从逼真程度、技术成熟度、测量通信、安全性、施工难度、组织实施等方面对3种方案进行了研究分析, 可以看出这些方案具有理论上的可行性, 能够满足航行器水下发射及测试需求。
1 需求分析
1.1 航行器发射条件需求
1) 发射平台有速发射。为充分模拟真实发射环境, 获得完整可靠的水下发射参数, 考核不同牵连速度下航行器水下动力学环境, 平台能实现航行器水下发射试验的有速发射。
2) 不同深度发射。根据航行器发射对深度要求的不同, 平台能实现不同深度的发射。
3) 航行器远程测试与发射。为满足试验安全要求, 无人水下发射平台需要在安全区外进行航行器的测试准备和发射控制。
1.2 平台自身需求
1) 实现深水远程控制。通过有线远程控制实现水下发射平台的上浮和下潜、发射模块的牵引、航行器的测试和发射等。
2) 适应高海况环境。水下发射试验平台能够在高海况下具备升降和发射试验能力。平台自调平与定位, 平台下沉后, 能够控制平台调平并定位。
3) 满足航行器外形、质量、发射后坐力需求。发射平台应满足所需试验航行器发射装置的安装要求, 能承受所试验航行器在发射瞬间产生的后坐力。
4) 合适的舱室环境、分区的封闭舱室。水下发射平台应能够将舱室温度、湿度等环境参数控制在要求范围内。为满足水下测量通信等设备的安装使用需求, 水下发射试验平台应具有适量的封闭舱室。
2 无人水下发射试验设施方案
2.1 锚泊式方案
2.1.1 方案概述
锚泊式水下发射试验设施采用航天、船舶和海上平台等成熟技术, 即在海底设置某种位置固定的基底设备, 用锚缆将水面或水中发射平台与基底设备连接起来, 以限制平台的移位。具体来说, 就是利用吸力锚产生向下的拉力, 将平台台体整体固定于某一深度, 在浮动平台上牵引滑动平台运动实现航行器定深带速发射, 其海上布局示意图如图1所示。
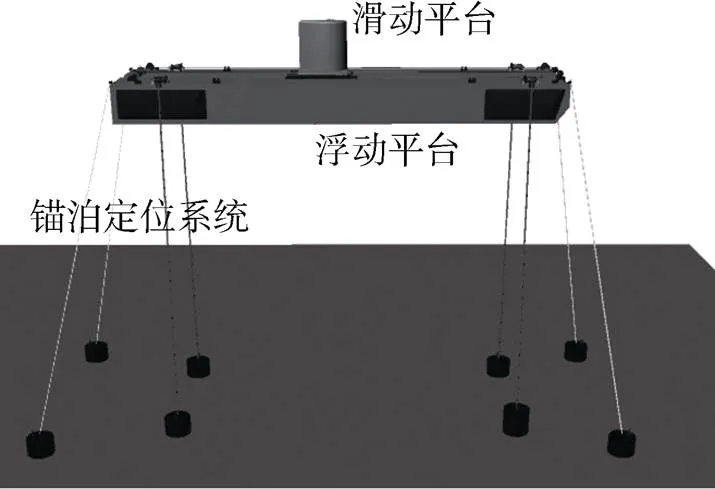
图1 锚泊式水下发射试验设施海上布局示意图
2.1.2 系统组成及功能
锚泊式水下发射试验设施主要由遥控船、试验平台、锚泊定位系统及测量通信系统等组成。
1) 遥控船
遥控船的主要功能是实现对无人水下试验平台的远程操控, 并提供测试、操控和遥控专用场地, 为水下平台供电、供气及供油, 进行指挥控制及信息转发。遥控船与水下试验平台之间可通过光电复合缆进行信息传递。
2) 试验平台
试验平台由浮动平台、滑动平台、注排水系统以及移动与安全防护系统等组成。浮动平台提供水下稳定基础, 抵抗航行器发射后坐力, 由锚泊系统牵拉使其保持在水中的一定深度, 其整体入水和出水的运动需要靠大量注水和充气来实现。滑动平台装载着水下发射航行器, 由移动与安全防护系统牵引, 可在浮动平台上滑行, 达到模拟真实发射平台水下水平运动的效果。
3) 锚泊定位系统
锚泊定位系统主要由锚绞车、钢缆、4个垂向吸力锚、4个斜向吸力锚、液压系统和控制系统等组成。其主要功能是提供试验平台在水下试验状态下的垂向系锚力, 并保证在航行器发射后坐力下的安全性; 提供试验平台的纵向及侧向系锚力, 保证试验过程中平台的运动参数满足试验要求[8-9]。
4) 测量通信系统
测量系统用于获取试验平台的运动、姿态信息和发射系统水下发射过程中的诸多参数, 并对水下物理过程进行光学测量和拍摄。测量设备水下终端布置于试验平台上, 水面的显示控制终端位于遥控船上, 水下的测量数据、图像视频、设备状态信息, 水面的远程控制信号等均由遥控船与试验平台之间的信号光缆负责传递。
通信系统主要将水下的数据、图像等信息通过光缆传输到遥控船上, 会同遥控船上的调度、电话、图像等信号通过微波通信系统传送到岸站, 再利用光纤通信系统传送到陆上指挥部位。
2.1.3 可行性分析
1)试验平台与海底采用柔性联接方式, 发射过程中的运动特性与真实发射平台最为接近, 具有真实海洋环境优势, 能模拟真实发射平台发射条件。浮动平台和滑动平台能满足航行器发射时的速度和姿态要求, 可在适当海域进行大范围的深度调节, 符合航行器的不同发射深度试验需求。
2) 平台主体距离海底有一定距离, 而且采用吸力锚技术, 对海底地质地貌要求较低, 无需进行复杂的地质勘探及海底作业施工, 可以选择更多的发射海域, 便于多处选址, 可根据试验需要较为灵活地选择发射海域。
3) 系泊结构物和其锚泊系统整体处于波浪等外力作用下, 其运动和受力相互影响, 相互耦合, 系泊结构的漂移量在各种条件下的稳定保证了设施的工程实现。
2.2 桩腿自升式方案
2.2.1 方案概述
桩腿自升式水下发射试验设施以半潜式采油平台技术为基础, 即在海底固定4根桩腿, 浮动平台穿过桩腿利用自身的注排水实现升降后, 由桩腿锁定系统完成锁定, 在浮动平台上牵引滑动平台运动实现航行器定深带速发射, 其结构示意图如图2所示。

图2 桩腿自升式水下发射试验设施结构示意图
2.2.2 系统组成及功能
桩腿自升式水下发射试验设施主要由远程控制平台、浮动平台、桩腿及测量通信系统等组成。
1) 远程控制平台
根据桩腿式水下发射试验设施在海上的位置来决定远程控制平台采用海上遥控船或岸基控制指挥所。具体功能同锚泊式方案的遥控船。
2) 试验平台
试验平台由基础平台、滑动平台以及移动与安全防护系统等组成。基础平台应有足够的强度承受航行器发射过载, 通过注排水系统向压载水舱注水或排水, 实现压桩和基础平台升降操作。由移动与安全防护系统牵引, 可在浮动平台上滑行, 达到模拟真实发射平台水下水平运动的效果。
3) 桩腿
桩腿可采用圆柱式桩腿或桁架式桩腿。桩腿上有齿条, 为基础平台升降提供导向及锁定基础, 是抵抗航行器发射后坐力的关键部件。柱腿上的升降/锁定系统可实现基础平台沿桩腿的升降运动及锁定。
4) 测量通信系统
与锚泊式方案基本相同。
2.2.3 可行性分析
1) 桩腿式水下发射试验设施对海底地貌要求较低, 技术上可行, 但需要对海底地质进行勘查, 然后确定能否压桩并获取压桩深度。
2) 目前海上自升式钻井平台使用齿轮齿条作为升降/锁定系统部件, 单套升降/锁定机构静态载荷可达到2 000 t, 动态载荷可达800 t。采用多套升降/锁定机构, 承力结构静态及动态承载力均能满足桩腿式水下发射试验设施的需求。通过采用液压马达驱动以及合理可靠的水密措施, 可解决平台升降系统的水密问题[10-11]。
3) 针对滑动平台沿导轨有速运动情况, 滑动平台与导轨之间的设计需满足强度要求, 并与足够数量的滚轮组连接。设计上下双层导轨和侧面滚轮组, 可以防止发射模块左右倾覆; 导轨设置反向运动滚轮, 可以防止滑动模块前后倾覆。
2.3 沉箱式方案
2.3.1 方案概述
沉箱式水下发射试验设施以半潜式采油平台技术和潜艇设计为基础, 即由沉箱实现平台的上浮下潜, 由桩腿及升降/锁定系统实现滑动平台的定深, 通过导轨与牵引系统实现滑动平台的水平运动, 其结构示意图如图3所示。

图3 沉箱式水下发射试验设施结构示意图
2.3.2 系统组成及功能
沉箱式水下发射试验设施主要由遥控船、沉箱、滑动平台及测量通信系统等组成。
1) 遥控船
与锚泊式遥控船方案基本相同。
2) 沉箱
沉箱主要由沉箱本体、注排水系统、桩腿及升降/锁定系统、导轨与牵引系统等组成。本体有足够的强度承受航行器发射过载。通过注排水系统向压载水舱注水或排水, 实现平台整体上浮、下潜操作。桩腿及升降/锁定系统实现滑动平台的升降, 导轨与牵引系统实现滑动平台的运动。
3) 滑动平台
滑动平台主要由航行器发射装置、简易发射保障系统、发射动力系统、舱室等组成, 并为相应测量通信及监测设备提供安装基础, 提供一定浮力以降低模块对导轨的压载。
4) 测量通信系统
与锚泊式方案基本相同。
2.3.3 可行性分析
1) 沉箱式水下发射试验设施对海底地质地貌要求较高, 有2种坐底方式选择, 一种是对海底进行平整施工, 另一种是直接使用相对平整海域。
2) 沉箱式平台整体(含滑动模块)海上运输, 可以借鉴海上自升式钻井平台拖头式或侧跨式拖航技术。
3) 对于有速滑动平台, 为减小滑动平台水阻力和附加质量, 降低滑动平台牵引系统功率需求, 滑动平台设计为流线型。根据航行器发射方式不同可选择安装垂直发射模块和水平发射模块。
3 分析比较
3.1 锚泊式方案
锚泊式方案试验平台距离海底有5 m以上的距离, 对海底地质地貌要求较低, 无需进行复杂的地质勘探及海底作业施工, 可选择更多的发射海域。方案所涉及的吸力锚、试验平台升降、滑动平台移动等技术相对成熟。试验平台还可模拟真实发射平台发射航行器时的瞬时下沉。但该方案布锚数量多, 联合控制平台姿态算法较为复杂。锚泊系统需滞留海上相对较长时间, 故选择海域时应避开海上航道, 避免对船只航行造成影响。
3.2 桩腿自升式方案
桩腿自升式方案借鉴的自升式钻井平台技术已相当成熟, 涉及到的载荷及稳定性问题有充分的理论和实践依据[12]。在现有自升式钻井平台中每根桩腿抗风暴能力可达20 000 t, 足以支撑整个平台平稳工作。桩褪可承受横向力约100~200 t, 初步估计可以满足滑动平台水下运动时所产生的驱动反力及水下横流产生的力量。但基础平台下潜时桩腿会伸出海平面, 存在航行器发射及下落过程中碰撞桩腿的风险, 需要进行风险评估, 并制定完备的桩腿被撞预案及维修方案。
3.3 沉箱式方案
沉箱式方案充分借鉴融合了沉箱坐底和海上石油平台自升降技术, 不但实现了发射深度以及发射平台运动速度的模拟和控制, 而且很好地解决了航行器落水引起的水面以上结构物碰撞风险和发射后坐力问题。另外, 方案建设和操作使用相对灵活方便, 海上固定设施相对较少, 只需要对海底简单施工, 便可方便地实现多处选址试验。但整个平台系统海上拖带复杂, 速度较慢, 海上稳定性有待进一步精确计算, 且不能模拟航行器发射真实发射平台的瞬时下沉。
综上所述, 3种方案在海洋环境下都具备海流、海浪、深度及速度等要素。且从海洋环境要素、组织实施、维护保养及技术实现的难度等方面来看, 锚泊式发射平台方案最具优势。
4 结束语
文中从方案概述、系统组成与功能、可行性分析3个方面论证了3种无人水下发射试验设施方案构想, 并进行了分析比较。构想的3种无人水下发射试验设施具备完成不同航行器水下发射试验的功能。各方案都较为逼真地模拟了真实的水下发射平台发射条件, 均采用无人值守方式, 充分降低了对人员的风险, 并借鉴船舶、潜艇和海上平台设计等成熟技术增加了试验设施设计方案的可行性。
文中对于水下发射试验设施的可行性分析仅为理论分析和一些结构强度、试验设施规模的计算, 尚未进行大量仿真分析计算。试验设施建设是一项复杂的系统工程, 技术新、难度大、要求高, 尤其是其在海上特有技术问题方面, 未来还需开展更为深入的研究论证和计算分析工作。
[1] 黄海龙, 权晓波, 魏海鹏, 等. 美国潜射战略导弹水下发射技术试验设施分析与启示[J]. 导弹与航天运载技术, 2014(2): 27-30.Huang Hai-long, Quan Xiao-bo, Wei Hai-peng, et al. Ana- lysis and Enlightenment on the US Test Equipment of Un- derwater Launch Technology[J]. Missiles and Space Vehi- cles, 2014(2): 27-30.
[2] 蓝仁恩, 马艳丽, 蔡菀, 等. 水下无人发射平台发展综述[J]. 飞航导弹, 2015(5): 58-61
[3] 吕小红. 牵引式水下发射平台[J]. 飞航导弹, 2002(12): 29-31.
[4] 张铁栋. 潜水器设计原理[M]. 哈尔滨: 哈尔滨工程大学出版社, 2011.
[5] 谢永和, 吴剑国, 李俊来. 船舶结构设计[M]. 上海: 上海交通大学出版社, 2011.
[6] 张大刚. 深海浮式结构设计基础[M]. 哈尔滨: 哈尔滨工程大学出版社, 2012.
[7] 秦大同, 谢里阳. 机架、导轨及机械振动设计[M]. 北京:化学工业出版社, 2013.
[8] 霍文军. 海洋锚泊定位系统操作控制及布放实践[J]. 机电设备, 2018, 35(5): 23-26. Huo Wen-jun. Operation Control and Positioning Place- ment of Marine Anchor Mooring Positioning System[J]. Electromechanical Equipment, 2018, 35(5): 23-26.
[9] 潘方豪, 单铁兵. 深水半潜式生产平台锚泊定位系统配置简述[J]. 中国海洋平台, 2017, 32(1): 1-6.Pan Fang-hao, Shan Tie-bing. Introduction to Mooring Positioning System of Deep Water Semrsubmersible Production Platform[J]. China Offshore Platform, 2017, 32(1): 1-6.
[10] 付勤业. 海洋石油931钻井平台升降系统的分析[J]. 中国修船, 2009, 22(1): 49-51.
Fu Qin-ye. Jack-up System on 931 Offshore Drilling Platform[J]. China Ship Repair, 2009, 22(1): 49-51.
[11] 黄维学, 刘放. 自升式海上钻井平台升降系统技术特点分析[J]. 设计与计算, 2011(2): 1-3.Huang Wei-xue, Liu Fang. Technical Characteristics Ana- lysis of Jacking System of Offshore Jack-Up Drilling Pl- atform[J]. Design and Calculation, 2011(2): 1-3.
[12] 李英, 吴子昂, 程阳, 等. 自升式平台圆柱式桩腿水动力载荷试验[J]. 中国海洋平台, 2018, 33(4): 45-50.Li Ying, Wu Zi-ang, Cheng Yang, et al. Test on Hydrodynamic Loads of Pipe Leg of Jack-Up Platform[J]. China Offshore Platform, 2018, 33(4): 45-50.
Design Ideas of Unmanned Underwater Launch Test Facility
SONG Jie
(91550thUnit, The People’s Liberation Army of China, Dalian 116023, China)
To assess underwater launching technology and avoid test risk of underwater launching vehicle effectively, three design ideas of unmanned underwater launch test facilities of anchoring type, pile leg self-lifting type and caisson type are put forward according to the task requirements with reference to the corresponding foreign design ideas. The composition and function, working principle, working process of the system are briefly described. Based on the real marine environment conditions, the three schemes simulate the launch conditions of the real underwater launch platform realistically, adopt the unmanned mode to ensure their safety, and increase the feasibility of the test facility design schemes with reference to the mature technologies about the designs of such as ships, submarines and offshore platforms. The three schemes are compared in terms of technical difficulties, organization and implementation, and fidelity. The analysis results show that from the aspects of marine environment elements, organization and implementation, maintenance and technical implementation difficulty, all three schemes can meet the underwater launch and test needs of the vehicle, among which the anchored launch platform scheme has the most advantages.
unmanned underwater launch test facility; anchoring type; test
TJ65; TJ762.4
A
2096-3920(2020)02-0220-05
10.11993/j.issn.2096-3920.2020.02.016
2019-05-08;
2019-08-30.
宋 杰(1982-), 男, 工程师, 主要研究方向为装备试验与仿真.
宋杰. 无人水下发射试验设施方案设计构想[J]. 水下无人系统学报, 2020, 28(2): 220-224.
(责任编辑: 杨力军)