空间激光通信中复合跟踪技术研究
2020-05-12刘云清
王 伟,刘云清,董 岩,赵 馨
(1.长春理工大学电子信息工程学院,吉林 长春130022;2.长春理工大学研究生学院,吉林 长春130022)
1 引 言
空间激光通信与传统通信技术相比,具有高保密性、通信速率高、抗干扰等诸多特点,已经成为现代科技发展的主流通信方案。由于激光通信通常应用于远距离传输通信,因此要求目标光束的精确对准,而光束是呈高斯分布,即随着距离的增加,光束范围越大,故激光通信精确度应小于束散角的1/5-1/6,相应的跟踪精度一般要求达到微弧度量级。一般的单轴跟踪系统由于具有大惯量和谐振频率的限制,不能满足实际的跟踪需求,于是衍生出复合轴跟踪系统[1-3]。复合轴跟踪系统最早见于1966年Thomas W.发表的文章[4],作者在数字激光测距跟踪装置中首次采用了复合轴伺服机构,使用主机架作为它的粗跟踪,使用快速反射镜作为精跟踪,实时对粗跟踪进行修正补偿,实现了更高精度的跟踪。欧空局(ESA)SILEX计划采用的复合轴系统于2001年11月成功实现了星间激光通信,该系统验证了复合轴系统应用于激光通信的可行性,具有里程碑的意义[5]。传统的复合轴跟踪系统为双探测器跟踪系统,虽然可实现高精度的跟踪,并且技术成熟,但是其光路设计难度大、体积大等缺点也成为了限制其发展的主要因素。系统的轻小型化成为主流发展趋势和研究重点[6]。单探测器型复合轴系统采用一个探测器,其激光通信结构方面减少了一路光学系统,有效地实现了轻小型化,同时带来的是单探测器复合轴系统耦合性大的问题。单探测器复合轴系统以美国的OCD系统最为成功,该系统采用探测器二开窗结构,突出了轻小型化。
结合空间激光通信的特点和复合轴跟踪的关键技术,对单探测器复合轴粗、精跟踪系统做进一步讨论,给出粗、精跟踪伺服系统设计方案,并在室内搭建实验平台,对系统的跟踪精度指标与通信性能进行测试,实现跟踪精度优于1个像素。满足应用需求,扩宽了空间激光通信复合轴的应用前景。
2 单探测器复合轴系统原理
单探测器复合轴伺服系统主要由目标的捕获、粗跟踪、精跟踪三个部分构成。其系统基本组成原理如图1所示。系统采用唯一探测器进行目标的捕获以及对粗、精跟踪系统进行控制,实现单探测器系统的轻小型化,但粗精耦合性强,不易控制,易导致目标脱离粗跟踪跟踪范围,进而导致跟踪失败。针对复合轴组成特点,采用粗跟踪配合补偿精跟踪偏转量的方法可有效实现粗精解耦合。首先对目标的初始扫描捕获阶段,CCD跟踪相机与粗跟踪系统形成闭环,这个阶段,相机工作在大视场,低帧频状态,脱靶量信息提供给粗跟踪,实现对目标的快速捕获。随后捕捉到目标后进行粗跟踪,当目标稳定在精跟踪视场内,启动精跟踪,此时CCD跟踪相机与精跟踪系统形成闭环,脱靶量信息将只提供给精跟踪,而粗跟踪脱靶量信息由精跟踪的快反镜角度传感器给出。这个阶段,相机工作在小视场,高帧频状态,可实现对目标的精确跟踪。通过上述过程可以保证粗精复合轴系统稳定工作。

图1 单探测器APT系统基本组成原理图Fig.1 Basic configuration diagram of single detector APT system
3 单探测器复合轴伺服系统设计
3.1 单探测器系统结构原理
根据复合轴组成原理,设计单探测器复合轴系统结构框图如图2所示。探测器D1,提取目标位置信息θi,并将目标脱靶量传递给精跟踪系统,经解算得出控制单元补偿函数Cf(s),进一步通过精跟踪伺服单元Af(s)进行跟踪补偿;解耦回路D2采集精跟踪系统的偏转量,给出粗跟踪控制单元补偿函数Ce(s),通过粗跟踪伺服单元Ae(s)进行补偿,最后将粗、精跟踪补偿信息反馈,形成闭环。

图2 单探测器系统结构框图Fig.2 Single detector system block diagram
令Ge=Ae×Ce,Gf=D1×Cf×Af,整个系统的传递函数如式(1),整个单探测器系统的闭环传递函数有效地实现了解耦。
(1)
2.2 单探测器系统建模
整个单探测器复合轴系统正常工作过程中,粗跟踪的伺服系统将停止对光斑脱靶量的采集,其脱靶量信息由精跟踪的快反镜角度传感器给出,再由执行器(伺服电机)进行跟踪,完成对精跟踪的补偿。整个粗跟踪系统校正后的模型函数为式(2)所示。
(2)
精跟踪系统的脱靶量信息由高帧频CCD跟踪相机提供,伺服执行器采用小惯量、高带宽、高精度的快速反射镜,振镜可实现高达2 k带宽,可实现对目标的快速跟踪。整个精跟踪校正后的模型函数为式(3)所示。
(3)
4 实验测试及结果
搭建实验系统完成单探测器复合轴跟踪系统性能测试,实验验证结构图如图3所示,光源采用光纤激光器,可通过外部输入对其光强度进行调制,在激光链路中我们采用六自由度转台给整个系统添加一个扰动,用此模拟目标运动轨迹。光信号进入平行光管,进行光路的调整,调整后的光路进入潜望周扫架构,经CCD相机,可解算出运动目标的脱靶量信息,并将此信息提供给精跟踪系统,由精跟踪控制系统控制精跟踪执行器进行目标位置的追踪,随后角度偏转传感器将提取精跟踪的位置偏转角度,并将此角度信息传递给粗跟踪控制系统,控制粗跟踪对精跟踪偏转的角度进行补偿,并将最终的补偿结果反馈给主系统,即形成CCD相机、精跟踪、粗跟踪的闭环控制。整个跟踪过程,可通过图像显示单元观察到光斑的位置,以及是否进行了有效的跟踪。
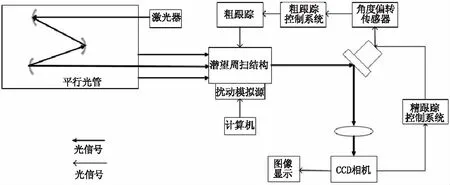
图3 实验验证结构图Fig.3 Experimental verification structure
探测相机选用CCD 相机,设置积分时间 10 ms,当其工作在大窗口模式时,分辨率为1240×1240 像素,当其工作在小窗口模式时,分辨率为80×80 像素。测试中给定扰动模拟源,幅值±0.25°、频率0.1 Hz。光斑实际扰动轨迹如图4所示。
当系统进行跟踪,即粗精复合状态时,精跟踪跟踪目标,粗跟踪对精跟踪偏转位置进行补偿,系统各部分运动轨迹如图5所示。图5为粗跟踪运行轨迹图,由设计原理知其反映精跟踪的偏转位置,故应与扰动轨迹相同。对比可知粗跟踪运动轨迹与实际转台的运动曲线相符,因此实现系统功能。

图5 粗跟踪运行轨迹图Fig.5 Rough tracking trajectory map
图6为精跟踪运行轨迹图,此图反映的是系统粗跟踪误差,跟踪精度为±500 μrad之内。图7为跟踪图像轨迹图,反映的是系统精跟踪误差。此时精跟踪反应该系统的总体误差;可看到系统的精度误差控制在1个像素之内,均方根RMS=0.13,本实验采用的单像素点为22 μrad,故系统总体跟踪精度为22×0.13=2.86 μrad。结合实验条件知,满足单探测器复合轴跟踪系统实际应用需求。
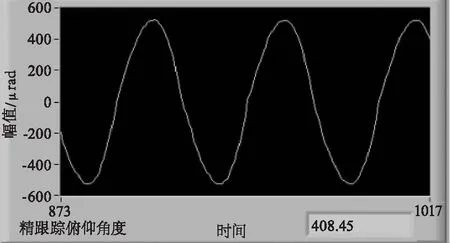
图6 精跟踪运行轨迹图Fig.6 Fine tracking trajectory map
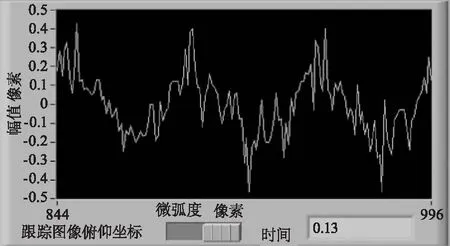
图7 跟踪图像轨迹图Fig.7 Tracking image track map
5 结 论
空间激光通信是未来高速、大容量通信领域的关键技术也是发展趋势[7]。近几年来,在APT子系统上已取得了重大的突破。本文基于单探测器复合轴跟踪系统,采用CCD跟踪相机与精跟踪系统形成闭环的工作模式,实现目标跟踪。精跟踪脱靶量信息由CCD相机提供,粗跟踪脱靶量信息由精跟踪的快反镜角度传感器给出,实时补偿精跟踪的偏转角度,保证目标稳定在精跟踪视场,提高系统的稳定性。解决了单探测器复合轴系统的耦合性问题。并在室内搭建实验系统,对系统的跟踪精度指标与通信性能进行测试,实现粗跟踪伺服系统带宽为10 Hz左右,精跟踪伺服系统带宽为300 Hz左右。实验结果表明,在固定扰动幅值±0.25°、频率0.1 Hz模式下,系统粗跟踪误差控制在±500 μrad之内,系统精跟踪跟踪精度优于3 μrad。整个跟踪系统稳定,可以实现高稳定、高精度的跟踪,满足其在空间激光通信系统中的应用需求。这种设计为系统在空间光通信方面的研究奠定了基础。
