烹饪机器人搅拌机构设计及其多体动力学分析
2020-05-11黄良海王小龙李亚明
黄良海 - 王小龙 - 李亚明 -
(广东万家乐燃气具有限公司,广东 佛山 528300)
搅拌机构是烹饪机器人最重要的机构之一[1-2],主要作用是对物料进行搅拌翻炒,使其混合充分,受热均匀。当前烹饪机器人所用搅拌机构形式多样,祝俊[3]和李鲜明[4]对大型烹饪机器人搅拌机构进行了设计研究,但其结构较为复杂,且不适合小型烹饪机器人;雷鸣等[5]设计的搅拌机构搅拌运动轨迹复杂,可实现物料充分混合,但是结构很复杂,需使用气缸,成本高且不便清洗,故不适合家用及小型餐厅;彭放[6]设计的家用炒菜机采用滚筒式翻炒机构,依靠锅具滚动实现菜的翻炒,此类炒菜机仅适合电炒锅,应用范围有限;周晓燕等[7-8]设计的搅拌机构为单轴驱动搅拌,此类搅拌机构适合餐厅商用或家用,但是搅拌运动轨迹简单,混合不够充分,容易受热不均导致部分菜肴过熟。
试验拟设计3种不同的搅拌机构,对各种设计进行多体动力学分析,并制造样机进行验证,以期获得适用于餐厅商用或家用烹饪机器人的搅拌机构。
1 搅拌机构设计
烹饪机器人以目前市面上最常见的燃气用平底圆锅为锅具[9]。锅具布置在颠锅机构上,搅拌机构布置在锅盖臂上。根据以上布局及锅具特征,拟设计单轴搅拌、同轴正反转搅拌及行星搅拌3种搅拌机构。
1.1 单轴搅拌机构设计
单轴搅拌机构方案如图1所示。减速电机1水平布置,其输出轴与主动锥齿轮2固连,主动锥齿轮2与锥齿轮轴3啮合(二者齿数相同)。锥齿轮轴3下端与横梁5固连,且其通过轴承与机座转动连接。锅4与锥齿轮轴3同轴,并位于搅拌片6的下方。搅拌片6共4片,分别沿径向和圆周方向错开布置在横梁5上,且与锥齿轮轴3径向呈夹角,锥齿轮轴3旋转一圈,搅拌片6可覆盖锅内侧大部分区域。搅动时依靠搅拌片6倾角使物料沿流向滑动,此外不同区域物料加速度不同将会形成惯性冲击,从而实现物料的混合。
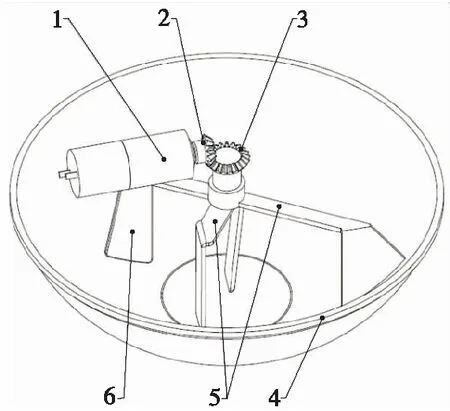
1.减速电机 2.主动锥齿轮 3.锥齿轮轴 4.锅 5.横梁 6.搅拌片
图1 单轴搅拌机构方案图
Figure 1 Schematic diagram of uniaxial stirring mechanism
1.2 同轴正反转搅拌机构
同轴正反转搅拌机构方案如图2所示,减速电机1水平布置,输出轴与主动锥齿轮2固连。主动锥齿轮2上、下分别与上锥齿轮4和下锥齿轮轴5啮合,上锥齿轮4和下锥齿轮轴5齿数相同。搅拌内轴3的上、下端分别与上锥齿轮4和主搅拌铲7固连,下锥齿轮轴5的下端和副搅拌铲8固连,副搅拌铲8上的副搅拌片与下锥齿轮轴5径向呈夹角。下锥齿轮轴5内、外侧分别通过轴承与搅拌内轴3和机座转动连接。锅6与搅拌内轴3同轴,且位于主副搅拌铲的下方。
主搅拌铲搅动锅中心区域物料,副搅拌铲搅拌锅外围区域物料。副搅拌铲不仅可以搅拌物料,还可以将锅边缘物料导入锅中心区域。另外,正反转主副搅拌铲各自搅动的物料在相互接近时产生冲击互混,可加强对物料的搅动。
正反转搅拌机构主副搅拌铲具有很好的可扩展性,搅拌片可根据实际情况有多种形式的布置,其形成的搅拌效果也有所差异。但是主搅拌铲靠近旋转中心的区域线速度很小,理论极限值为零,要想该区域搅拌充分需依靠物料之间的互混和冲击,以及主搅拌片加、减速或者离心力形成的惯性冲击。

1.减速电机 2.主动锥齿轮 3.搅拌内轴 4.上锥齿轮 5.下锥齿轮轴 6.锅 7.主搅拌铲 8.副搅拌铲
图2 正反转搅拌机构方案图
Figure 2 Schematic diagram of forward and backward stirring mechanism
1.3 行星搅拌机构设计
行星搅拌机构方案如图3所示,减速电机1水平布置,其输出轴与主动锥齿轮2固连,主动锥齿轮2与从动锥齿轮3啮合,二者齿数相同。从动锥齿轮3固定在搅拌轴4的上端,搅拌轴4下端与副搅拌铲5固连,副搅拌片5与搅拌轴4径向呈夹角。副搅拌铲5上布置有行星齿轮轴8。行星齿轮轴8下端与主搅拌铲7相连,上端与内齿轮9内啮合,内齿轮9齿数50,行星齿轮轴8齿数17。内齿轮9与机座固连。锅7与搅拌轴4同轴,并位于主副搅拌铲的下方。
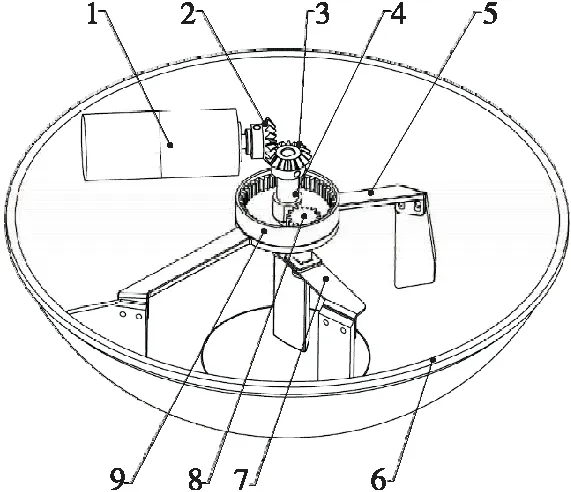
1.减速电机 2.主动锥齿轮 3.从动锥齿轮 4.搅拌轴 5.副搅拌铲 6.锅 7.主搅拌铲 8.行星齿轮轴 9.内齿轮
图3 行星搅拌机构方案图
Figure 3 Schematic diagram of planetary stirring mechanism
主搅拌铲绕搅拌轴公转同时绕行星齿轮轴自转,搅动锅中心区域物料。副搅拌铲搅拌锅外围区域物料,还可以将锅边缘物料导入锅中心区域。另外,主副搅拌铲的旋转方向相反,各自搅动的物料在相互接近时产生冲击互混,而且主搅拌铲本身的旋转速度大约是副搅拌铲转动速度的3倍,加之运动轨迹为平面螺旋扫描,因而该方式能使物料得到充分搅动。
2 多体动力学分析
根据离散元物料简化方法,用球形颗粒集合来模拟菜肴物料,建立多体动力学仿真模型,模拟搅拌机构搅拌物料运动状态。
2.1 颗粒流的离散元法
颗粒流是指颗粒物质在内外力综合作用下发生的类似于流体的运动状态[10]。颗粒流现象广泛存在于自然界中,诸如泥石流、雪崩、滑坡等。随着人们对颗粒流机理认识的深入以及现代计算机技术的发展,数值模拟方法被广泛用于模拟和分析颗粒流问题[11-15]。目前常用的数值模拟方法有连续介质模型和非连续介质模型,其中非连续介质模型中最常用的是离散元法[16]。研究[11-15]实践表明,基于离散元的数值模拟方式是散体力学分析的一种有效的工具。
离散元法的思想源于早期的分子动力学。其基本思想是将研究对象分离为刚性元素的集合,使每个元素满足牛顿第二定律,并求解各元素的运动方程,从而求得研究对象的整体运动形态。
设时间步Δt,球颗粒的平动方程和转动方程为:
(1)
式中:
Fi——不平衡力,N;
Mi——不平衡力矩,N·m;
Vi、ΔVi——分别为线速度及增量,m/s;
ωi、Δωi——分别为角速度及增量,rad/s;
m——质量,kg;
I——转动惯量,kg·m2;
βg——整体阻尼,N·s/m。
解式(1)可得线速度和角速度,然后根据式(2)可求得该球的新位置。由各球的新位置坐标可决定相邻颗粒是否接触。相互接触的球会产生假性重叠α,再由接触模型公式分别求出接触力Fi和Mi返归式(1)迭代。
(2)
式中:
Xi——平动位置,m;
Vi——速度,m/s;
Φi——转动位置,rad;
ωi——角速度,rad/s。
2.2 多体动力学分析前处理
利用CREO创建搅拌机构三维模型,模型进行适当简化,比如去掉不重要零件及零部件结构局部简化等。之后将模型以*.x_t中性格式导入多体动力学软件中,并对模型进行检查和修复[11]。多体动力学分析前处理还包括定义相互作用及边界条件、定义材料、定义模拟菜肴的颗粒、设置驱动及参数、设置结果输出参数等。3种搅拌机构参数设置保持一致,菜肴球颗粒直径12 mm,搅拌主轴驱动参数设置为50 r/min,转动时间设置为4 s(在此时间下主轴可转3.3 r),球颗粒与搅拌片等均设置为刚体[17]。
2.3 多体动力学分析结果
前处理设置完后提交求解,可以得到搅拌机构搅拌菜肴颗粒动画视频,通过动画视频可以直观地了解搅拌情况。为了更好地显示仿真结果,选取不同径向分布的颗粒进行标识,得到其运动轨迹,以更加准确地判断搅拌机构搅拌性能。
2.3.1 单轴搅拌机构结果分析 根据单轴搅拌机构仿真动画可知,颗粒周向运动较明显,径向窜动不明显,不易翻滚,相互之间也不易分散。选取2颗颗粒进行标识所得运动轨迹如图4所示。
由图4可知:颗粒周向运动明显,并且周向运动轨迹较长,说明颗粒周向运动速度较大,径向窜动不明显;颗粒运动轨迹较为简单,没有太多的停留、波折和局部转圈,表明物料之间冲击少,颗粒很少翻滚。说明单轴搅拌机构搅拌效果较差。

图4 单轴搅拌机构2颗粒运动轨迹
Figure 4 Two particles movement trajectory of single-axis stirring mechanism
2.3.2 正反转搅拌机构结果分析 根据正反转搅拌机构仿真动画可知,颗粒成组不明显,颗粒之间较容易分散且互混较明显,径向窜动也较好。选取2颗颗粒进行标识所得运动轨迹如图5所示。
由图5可知:颗粒周向运动明显,径向窜动较明显;颗粒运动轨迹较复杂,有较多的停留、波折和局部转圈,表明物料之间冲击较多,颗粒翻滚较多。说明正反转搅拌机构搅拌效果较好。
2.3.3 行星搅拌机构结果分析 根据行星搅拌机构仿真动画可知,颗粒很容易分散开,径向窜动和互混均明显。选取2颗颗粒进行标识所得运动轨迹如图6所示。

图5 正反转搅拌机构2颗粒运动轨迹
Figure 5 Two particles movement trajectory of forward and backward stirring mechanism
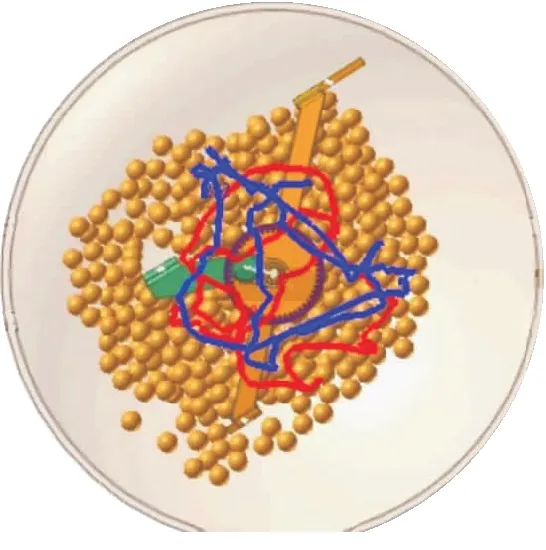
图6 行星搅拌机构2颗粒运动轨迹
由图6可知:颗粒做周向及径向运动,且运动轨迹很复杂,覆盖面广,说明运动特性很好;颗粒在某些点会临时停留并在局部转圈,说明在物料的相互冲击下,颗粒不断翻滚。相比正反转搅拌机构颗粒运动轨迹曲线图,行星搅拌机构颗粒运动轨迹曲线更长,说明颗粒在相同时间作用下运动速度更快,而且翻转更频繁。说明行星搅拌机构搅拌效果相比正反转搅拌机构更优。
为了更全面地确定行星搅拌机构的搅拌效果,将搅拌时间设置延长到12 s,即10 r。沿径向方向选取4颗颗粒分别标识为a、b、c和d,得到的运动轨迹如图7所示。由图7可知,行星搅拌机构的搅拌效果理想,满足设计需求。
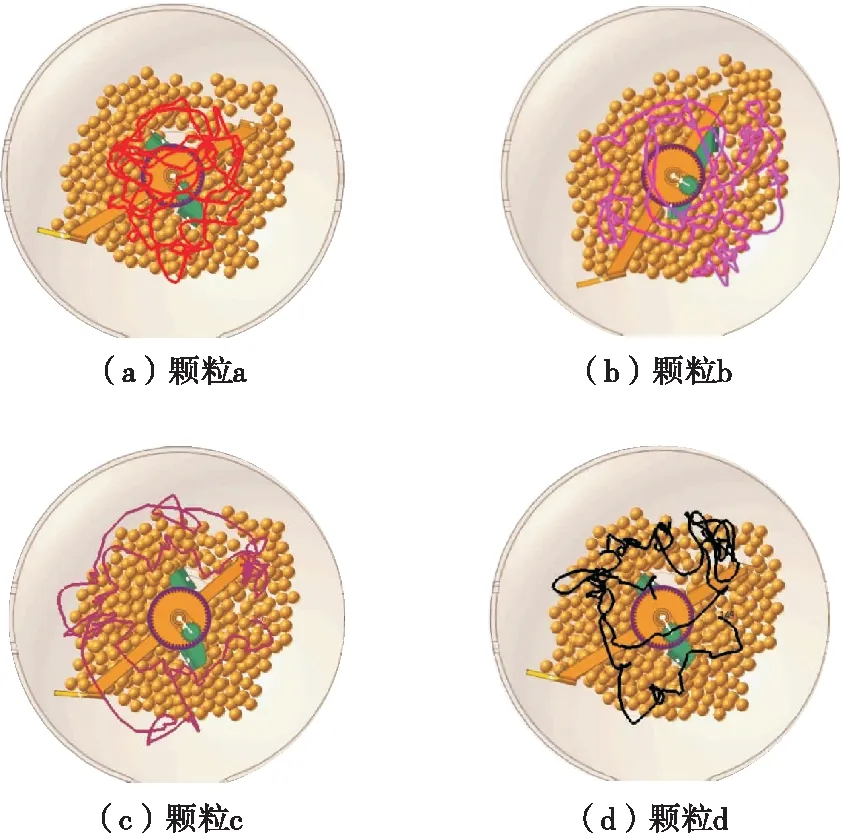
图7 行星搅拌机构对物料的搅拌效果
Figure 7 Stirring effect of planetary stirring mechanism on materials
3 结论
试验对某类型烹饪机器人设计的3款搅拌机构进行了研究,通过多体动力学仿真软件对其进行分析。研究表明:单轴搅拌机构搅拌效果最差,行星搅拌机构搅拌性能最优,其运动轨迹复杂,能使物料充分混合。试验行星搅拌机构适合用于商用餐厅或家用烹饪机器人。后续将通过多体动力学仿真软件对搅拌片的流向进行优化,以期获得更好的搅拌效果。
