基于浮空平台的星地激光中继通信系统设计
2020-05-09王荆宁李小明杨乾远薛松海
郎 磊,王荆宁,李小明,杨乾远,薛松海
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.长春理工大学,吉林 长春 130022;3.中国电子科技集团公司第三十四研究所,广西 桂林 541004;4.中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
0 引言
空间激光通信传输容量大,是未来星间和星地大容量通信的主要手段之一,但卫星激光通信链路与地面站之间通信会受到近地大气环境的影响,难以全天候工作,如能将地面激光通信设备升空至平流层高度,则可避免绝大部分天气环境、大气湍流等因素影响,应用前景可期[1-6]。
美国霍普金斯大学拟开展SPARCL计划,拟采用浮空气球搭载激光通信载荷中继接收高轨、低轨卫星下传的高速数据流,随后通过系留光纤下传到地面站,形成卫星-平流层-地面的全光下行传输链路,受限于平台成熟度,目前未见实际部署系统报道。在星地、空空激光通信试验方面,国内哈尔滨工业大学实现了低轨卫星504 Mbps的星地激光通信试验,中科院上海光机所“墨子号”搭载激光通信载荷完成了5 Gbps的星地激光通信试验,仅有长春理工大学开展了144 km距离内2.5 Gbps空空激光通信试验,尚未有星-平流层激光通信试验报道[7-11]。
1 系统设计
1.1 系统组成
星地激光中继通信系统如图1所示,主要包括平流层浮空平台、通信载荷、地面综合显控设施及地面保障设施等。
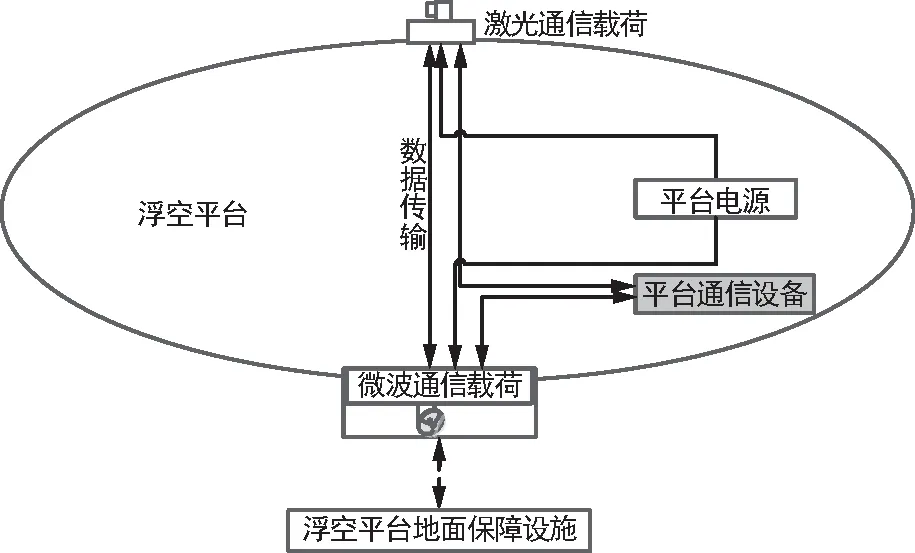
图1 星地激光中继通信系统组成示意图Fig.1 Schematic diagram of satellite-ground laser relay communication system
下面就系统的指标能力、传输体制、激光通信链路等进行详细分析。
1.2 系统体制分析
1.2.1 波段选择
激光通信常用信号或信标光波长为800 nm,1 310 nm,1 550 nm三个波段,其中1 550 nm由于空间背景光少,探测背景噪声低,且受益于光纤通信发展,该波段器件成熟度高,本系统采用1 550 nm波段作为星地激光通信链路的通信波段,800 nm波段作为信标光波段。
1.2.2 传输体制
星地激光通信体制主要由相干通信体制和IM/DD(强度调制/直接探测)体制两种,相干通信体制接收灵敏度高,并易于实现高阶调制,更适宜高速激光通信,星地激光馈电链路单波道支持的编码后发射/接收信号光速率不低于2.5 Gbps,编译码方式为7/8 LDPC码,同时可实现多档速率可调。
1.2.3 链路分析
星地激光中继通信系统在我国区域对卫星的链路通信距离一般不会超过40 000 km。以高轨卫星激光发射功率小于5 W,束散角小于50rad,激光通信设备光学口径小于250 mm为例进行分析。如表1所示,预期可实现不低于下行21.25 Gbps,上行625 Mbps的激光传输速率。
表1 星地激光通信链路预算
Tab.1 Link budget of satellite-ground lasercommunications

参数下行上行信号光发射功率/dBm33.941.7发射天线增益/dB108.598.5自由空间损耗/dB-290.2-290.2大气散射损耗/dB-2-2大气闪烁损耗/dB-5-5接收天线增益/dB114.1112.2APT适配损耗/dB-1-1接收光功率/dBm-41.7-45.8接收灵敏度/dBm-46.6-50.5安全余量/dB4.94.7
1.3 平台选择
常见的浮空平台如表2所示,可以看出太阳能无人机、平流层飘空气球承载能力均小于50 kg,由于激光通信载荷重量较大(>100 kg),因此上述两种浮空平台均无法搭载,只有平流层飞艇承载能力满足要求。
表2 浮空平台特性汇总
Tab.2 Summary of high-altitude aerostat characteristics

特性指标太阳能无人机平流层飞艇平流层飘空气球载荷重量≥50 kg≥200 kg≥50 kg升空高度≥18 km≥18 km≥18 km滞空时间≤25天≤30天≤7天供电能力<1 kW<2 kW<300 W载荷安装方式分布式顶部/底部底部
2 浮空激光通信载荷设计
2.1 载荷组成
浮空激光通信载荷是以激光为信息载体,在两节点间通过激光实现数据传递,其信号波束角小、调制速率高,在远距离、高速通信具有优势。浮空激光通信载荷主要由光机单元、PAT(指向-捕获-跟踪)单元和通信处理单元组成,如图2所示。
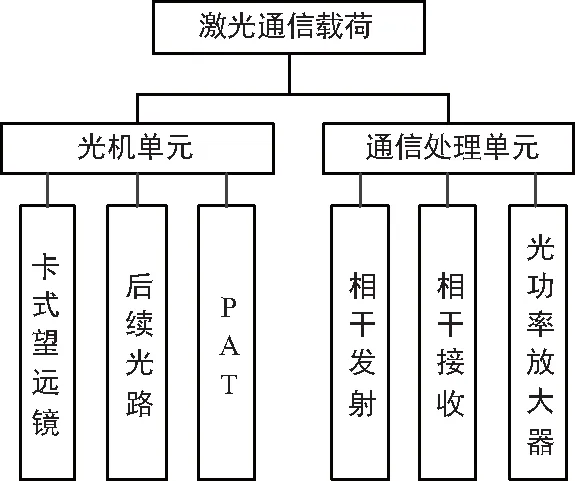
图2 浮空激光通信载荷组成框图Fig.2 Block diagram of laser communication payload on high-altitude aerostat
光机单元主要实现激光接收与发射,如图3所示。

图3 光机单元外形结构示意图Fig.3 Schematic diagram of structure of optical-mechanical unit
激光信号接收时,大口径光学镜头可以提高信号接收面积,保证接收能量。在激光信号发射时,大口径光学镜头可以压缩发射激光束散角(rad量级),提高发射时激光能量密度。
系统通过后续光路连接光学镜头与激光器、光探测器等元件,采用分光片等进行激光信号的分/合束,实现多光路集成。
PAT单元是激光通信载荷在动平台工作时的必要单元,由于激光通信束散角很小,对通信双方光轴对准精度要求极高,因此需通过机械机构对通信光轴进行实时调整,保证平台运动时通信载荷光轴的实时对准精度。激光通信系统采用粗、精复合跟踪系统,实现大角度范围下的高精度跟踪对准。
通信处理单元主要完成数据信号电光调制、光信号放大,光信号接收、光电转换与解调等功能。
2.2 载荷安装设计
2.2.1 安装位置分析
浮空激光通信载荷安装位置主要受平台承载能力、载荷安装机构是否与平台刚性连接,平台对激光链路遮挡程度等多个因素影响。
(1) 底部吊装
图4为浮空激光通信载荷底部吊装示意图,由于吊装缆绳无法满足与载荷的刚性连接,链路对准过程中无法提供载荷伺服机构转动时所需的反作用力矩,难以实现链路对准,因此底部吊装方式不可行。

图4 浮空激光通信载荷底部吊装示意图Fig.4 Bottom lifting of laser communication payload on high-altitude aerostat
(2) 顶部安装
在浮空平台顶部选取两个安装位置进行分析,如图5所示。经过计算,在平台俯仰角为0°的情况下,顶部两个安装位置所能达到的视场角度分别是134°和171°。头锥位置安装时,遮挡比较严重的是横向位置球体头部,该位置的向上视场角最小只有44°,在平台俯仰变化时可能会有一定概率不满足视场角要求。综合考虑以上因素,最终选择顶部位置,其视场角为171°。对上视场角最小为81°,考虑最大15°俯仰,最小视场角也能达到66°,超过最低视场角45°的载荷仰角要求。

图5 浮空激光通信载荷顶部安装示意图Fig.5 Top-mounted of laser communication payload on high-altitude aerostat
针对该位置,根据任务载荷重量不同计算囊体结构的强度以及变形情况,如图6所示。

图6 浮空激光通信载荷顶部安装位置应力及形变示意图Fig.6 Schematic diagram of stress and deformation of top-mounted laser communication payload on high-altitude aerostat
计算结果显示任务载荷在100 kg以内,最大变形为195 mm,仍在浮空平台顶部最大承受能力范围内,若继续增大载荷重量,浮空平台囊体将会变形过大无法保形。
2.2.2 安装结构设计
浮空激光通信载荷光机单元、激光放大器等组件统一安装在浮空平台顶部,采用顶部挂架方式进行安装;激光通信单元安装在浮空平台腹部整流罩内,采用底部挂架方式进行安装。
(1) 安装挂架设计
顶部挂架主要为浮空激光通信载荷电子设备提供安装空间,由挂架和设备舱组成,挂架主要是用于与浮空平台囊体绑扎连接,设备舱用于安装载荷设备。激光通信载荷光机单元安装在设备挂架顶部,其余电子设备安装在挂架内部设备舱,挂架与设备舱采用快卸销连接,可以快速分离,如图7所示。

图7 浮空激光通信载荷顶部安装示意图Fig.7 Top-mounted laser communication payload on high-altitude aerostat
顶部挂架采用多梁式结构,骨架主要由纵向梁与横向梁铆接而成,梁与框的材料主要是铝型材;设备舱由铝型材通过螺栓连接而成,具体挂架结构形式如图8所示。
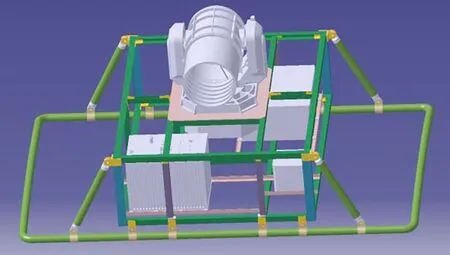
图8 浮空激光通信载荷顶部安装挂架结构示意图Fig.8 Top-mounted rack structure of laser communication payload on high-altitude aerostat
挂架安装方式是在浮空平台顶部位置把挂架通过囊体绑扎带与囊体绑扎连接,再把设备舱与挂架连接,同时两侧各拉四根张线,张线采用TS5-500强力绳编结而成。
(2) 载荷线缆布设设计
光机单元与通信处理单元之间用数据线缆和供电线缆连接,供电线缆从浮空平台底部整流罩内的平台供电设备中引出,数据线缆从整流罩内的通信处理单元中引出,均沿浮空平台囊体表面走线槽布设,与顶部光机单元等实现数据、供电连通。
2.3 浮空平台与卫星间激光对准分析与工作流程
2.3.1 影响激光对准因素分析
浮空平台是一种缓慢移动的平台,其运动特性对浮空激光通信载荷与卫星间的激光对准有关键性影响,下面从平台运动特性入手,分析平台位置变化等对捕获不确定区域的影响。
(1) 平台运动特性影响
对于系统设计来说,需要关注的是姿态变化和三轴角速度和角加速度。后续的设计按照姿态变化±15°,角速度不大于5°/s,角加速度不大于5°/s2进行设计。
(2) 平台位置引起的捕获不确定区域分析
浮空平台升空后,位置会根据风速和风向随机变化,最大位置变化范围可达公里量级,相对于40 000 km的通信距离,产生的不确定区域误差小于10rad,相对于卫星扫描不确定区域1.5 mrad,其误差小于6‰,所以平台位置变化产生的卫星指向误差很小,基本不影响扫描捕获。
2.3.2 浮空激光通信载荷对准流程
由于卫星和浮空激光通信载荷的初始指向均有较大的捕获不确定区域,且受链路距离影响,束散角较小,初始指向时双方信标光均无法直接覆盖对方载荷。
浮空激光通信载荷与卫星间采用扫描-凝视捕获方案[12]。由于高轨卫星平台稳定性较好,其光轴初始指向精度优于浮空平台,所以链路捕获模式设计为浮空凝视指向(被动端)与卫星激光扫描(主动端)的模式。具体主要参数如表3所示。
图9为激光通信设备捕获跟踪工作流程。浮空激光通信载荷与卫星对准开始前,首先对组合惯导单元的方位初值进行标定。捕获跟踪开始后,首先采用高精度GPS/INS测量浮空平台位置与姿态,浮空激光载荷与卫星激光载荷相互初始指向;浮空激光载荷凝视,跟踪相机接收视场覆盖其指向不确定区域,卫星激光载荷发射信标光在其初始指向不确定区域内进行连续扫描;当卫星激光载荷信标光进入浮空激光载荷粗跟踪视场后,浮空激光载荷转入粗跟踪模式,将卫星激光光斑跟踪到粗跟踪视场中心;随后浮空激光载荷发射信标光即可照射到卫星激光载荷粗跟踪视场,卫星激光载荷捕获浮空节点信标光后进行跟踪,双方完成链路捕获。
表3 浮空激光通信载荷工作参数
Tab.3 Work parameters of laser communication payload on high-altitude aerostat

参数名称说明扫描覆盖区域1.5 mrad,可调扫描方式螺旋扫描扫描重叠区域40%,可调扫描步进停留时间0.5 s,可调默认扫描次数3次,可调
至此浮空激光载荷与卫星的激光链路对准过程完成,可以开展系统性能测试,如通信速率、误码率测试等。
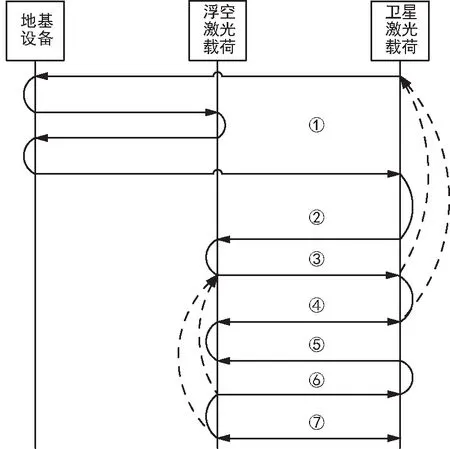
图9 浮空激光通信载荷捕获跟踪工作流程Fig.9 Flow chart of pat procedure of laser communication payload on high-altitude aerostat
3 结束语
本文设计了基于浮空平台的星地激光中继通信系统,受限于平流层平台成熟度不足,先期对缓慢移动的浮空平台搭载激光通信载荷与卫星间链路对准,激光通信载荷在浮空平台顶部柔性表面安装设计可行性等关键技术进行验证;后续将陆续开展平流层平台星地激光中继系统大容量微波/毫米波回传设备研制。平流层平台载荷环境适应性改进等工作,从根本上消除大气环境(云、雨、雾、大气湍流等)对激光通信的影响,解决星地激光通信受大气环境影响较大,无法全天候工作的难题,提高星地激光馈电链路可用度。
