一种用于中继卫星SMA系统在轨标校的新方法
2020-05-09王威,高昕
王 威,高 昕
(北京跟踪与通信技术研究所,北京 100094)
0 引言
中继卫星系统利用高轨道卫星对低轨道航天器等用户目标进行跟踪测轨和数据转发,它具有轨道覆盖率高、数据传输实时性强、能同时服务多个目标等特点,是重要的空间信息基础设施。2008年4月,我国成功发射了首颗GEO中继卫星——中继01星,并于2012年与02星、03星组成三星组网系统,形成对我国中低轨航天器100%的轨道覆盖,在载人航天任务中发挥了重要作用,具有广泛的应用前景;它的成功运行标志着我国成为继美国之后第2个拥有全球覆盖能力的GEO中继卫星系统的国家[1-2]。
近年来,随着我国航天事业蓬勃发展,中低轨卫星数目大大增加,使用中继卫星进行测控数传的需求日益增强。考虑到目前中继卫星资源有限,我国发展S频段相控阵多址(SMA)系统是大势所趋,它可提高卫星的服务能力。美国第一代跟踪与数据中继卫星(TDRS)的SMA系统采用30个阵元的相控阵天线和地基波束形成网络,基于码分多址技术可同时为20个用户航天器提供返向服务[3],而美国新一代中继卫星TDRS-K与TDRS-L已分别于2013年1月和2014年1月成功发射,其多址相控阵阵元的数量扩充至46个,将具备更高的EIRP和数据传输能力,并可通过地面波束形成网络进一步扩充用户航天器的服务数量。
SMA系统能同时服务多个目标,需要解决的一个关键问题是星载相控阵天线的波束形成。相控阵天线由于器件的不一致性、装配误差等多种因素,往往会出现较大的幅度和相位误差,导致增益降低、副瓣升高,因此波束形成前需要对相控阵天线进行标校。目前已经产生了不少行之有效的标校方法[4-5],但由于这些方法没有考虑天线载体与接收平台的相对运动,往往只适用于静止设备标校。中继卫星SMA系统的在轨标校与普通标校相比,存在两方面的特殊要求:① 由于卫星负荷的限制,不能在卫星上安装太多的标校设备,并且要求标校方法尽量简单;② 必须对运动中的相控阵天线进行在轨远距离的快速动态标校。这两方面的难度使得SMA系统在轨标校成为一个亟待解决的问题。
国外很早就开始了对星载相控阵天线标校的研究。日本学者Mano和Katagi等人于1982年提出了旋转矢量(Rotating-element Electric-field Vector ,REV)法[6],随后Takamura和Ohtsuka等人对REV法进行了改进[7],国内翟禹、卫旭芳等人近来针对REV方法结果的二义性进一步开展了针对性研究[8-9],耿淑敏等人开展了多站REV标定算法的性能分析[10];美国学者Silverstein等人于1997年提出归一化传输编码(Unitary Transform Encoding,UTE)算法和控制电路编码(Control Circuit Encoding,CCE)算法[11],同年Ashe,Yang和Silverstein等人对UTE和CCE法在有源相控阵发射阵校正中的应用做了实验验证[12-13]。其中UTE法需要在波束形成移相器之后增加额外的硬件以提供精确的信号编码,CCE法使用复杂的相干检测法提取相位信息,二者都需要在卫星上增加一个额外的参考通道,若硬件失效,标校分系统将无法运行,因此使用这两种方法均会增大卫星负荷,且可靠性下降,实用性不高;而REV法只需要测量幅度信息,设备量和标校复杂度大大降低,因此获得了更广泛的重视和应用[8-10,14]。
根据前文提及的SMA系统标校特点,现有方法中传统的REV法是相对更优的选择,但其只适合在时间与硬件资源较宽松的条件下应用。由于开展标校过程中,SMA系统无法正常使用,为了提高系统的使用效率,节省标校时间,本文提出了一种新的基于正交四相旋转的标校方法,该方法对接收信号功率方程进行降维处理与反演,能在保证精度的前提下更快速地完成对SMA系统的在轨动态标校。
1 信号模型
研究中继卫星SMA系统的在轨标校方法,首先给出信号模型。以波长为λ的N元星载相控阵的射频传输为例,若以接收站为坐标系原点,则第n个阵元的径向时变坐标矢量可表示为:
(1)

设在星载相控阵天线的发射端,第n个阵元的发射基带信号为:
(2)

(3)

因为卫星与接收站的距离满足远场条件,故有Rn(t)≈R0, 式(3)可以简化为:
(4)


2 在轨标校方法研究
2.1 REV法
针对星载相控阵天线的校正问题,Mano和Katagi提出了REV法[6],随后其他学者在此基础上对REV法的工程应用进行了卓有成效的探索[7]。考虑中继卫星的负荷限制等问题,无需附加设备、仅需进行地面功率检测的REV法是现有方法中的首选,下面简要介绍REV法的原理。
(5)
即在t时刻,接收站的接收合成信号为:
(6)
其中,
(7)
令第n个阵元的相位发生θ角度旋转,保持其余阵元发射信号不变,那么合成矢量信号为:
(8)
其中,
(9)
式(9)中,
(10)
(11)
(12)
式中,Qmax和Qmin分别为Qmax的最大值和最小值,Qmax是与Qmax对应的角度。
因为在波束形成中只需要知道阵元电场间的相对相位信息,故若以第1个阵元为参考阵元则有:
φn1=φn0-φ10=φn-φ1n=2,...,N。
(13)
利用{φn1|n=2,...,N}就可以实现在期望方向上的有效波束形成,即完成了对星载相控阵天线的标校。

图1 REV法原理示意图 Fig.1 Schematic diagram of REV method
2.2 一种基于正交四相旋转的新方法
REV法为了实现对运动载体相控阵的标校,必须在[0,360°]范围内对每个阵元的发射信号相位进行旋转,同时检测相应合成信号的功率,因此它的运算复杂度和校正时间与阵元数、移相器位数成正比,故当阵元数与移相器位数较多的时候,REV法将占用更多的时间和硬件资源。为了有效缩短标校时间,减小对硬件资源的依赖程度,提出了一种新的标校方法。
(14)
(15)
如果对第n个阵元电场进行θ角度的旋转,式(15)变为:
(16)
分别取θ=0°,180°,90°,270°,由式(16)得
(17)
可得

(18)
根据式(14)~式(18)及本节的分析可知,通过使用正交四相旋转,对接收合成场信号功率方程实施降维反演,很好地检测出了相对相位信息。该方法与REV的重大区别在于通过对功率方程的降维处理,只利用四个相位就能实现对φn1的检测,依次进行N-1轮,便能快速完成星载相控阵天线的动态标校。
根据新方法与REV法的工作原理,表1对新方法与REV法在运算量上的差别做了简单的比较,其中K代表移相器的位数,L表示采样次数,T表示采样时间。
表1 新方法与REV法的运算量比较
Tab.1 Comparing result of calculation amount

运算量新方法REV法测量次数4(N-1)L2KNL测量时间4(N-1)LT2KNLT
由表1可见,新方法的测量次数和时间不超过REV法的1/2K-2;举例来说,若使用K=6位的移相器,新方法的测量次数和时间不超过REV法的1/16,即在效率上至少提高了1个数量级。
3 仿真实验与分析
为了验证新方法的有效性,使用Matlab软件仿真并分析了新算法与REV法在不同信噪比、不同移相器位数条件下的标校性能结果。
仿真试验的基本条件为:阵列口径D=1.2 m,阵元数N=16,采用等边三角形布阵,载频f0=2 GHz,采样次数L=100,采样时间间隔T=1 ms,阵元初始相位信息在[-30°,30°]随机分布。图2分别给出了移相器位数K=6或7时,新方法与REV对φn1的平均检测标准偏差(Stundard Deviation,STD)随信噪比变化的比较结果,其中平均检测标准偏差STD定义为[15]:
(19)

表2给出了图2中部分信噪比取值时,使用不同位数移相器条件下两种方法估计的标准偏差。以6位移相器为例,在较低信噪比条件(SNR=32 dB)时,新方法较REV法估计的统计精度相差约为2°。考虑通道相位误差对波束形成后合成波束的影响结果,2°的通道相位误差带来的最大指向误差约为0.077°,造成的最大增益损失约为0.02 dB,可以忽略不计,且信噪比越高,二者性能越接近,估计精度逐渐趋近于移相器的量化误差;根据前文分析,使用6位移相器的标校时间不超过REV的1/16,7位移相器约为1/32。可见,新方法与REV法具有渐近一致的阵列标校性能,而新方法的处理时间得到了较大优化。

图2 不同SNR下两种算法的STD曲线 Fig.2 STD Curve varing with SNR for the proposed method and REV method
表2 不同SNR下新方法与REV算法的STD/(°)
Tab.2 STD at different SNR for the proposedmethodandREVmethod
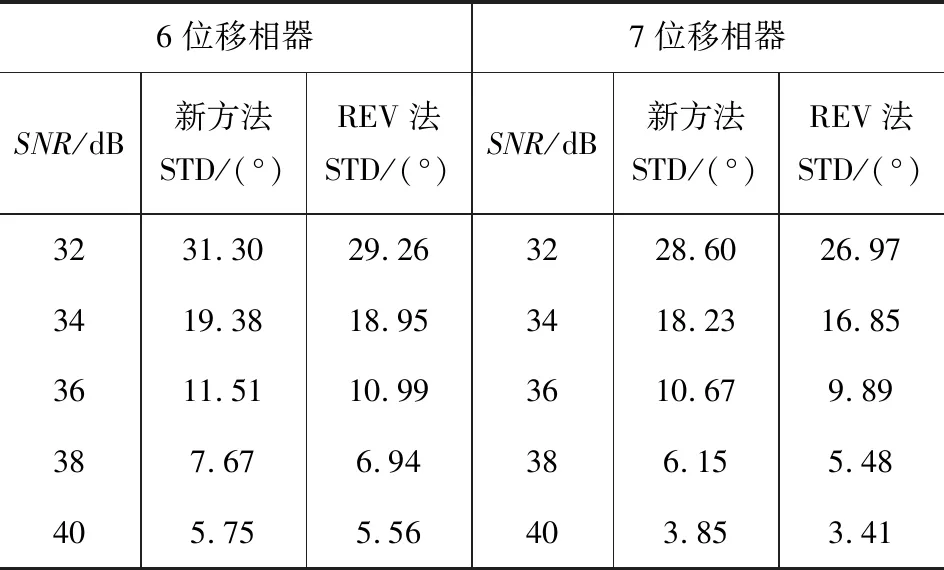
6位移相器7位移相器SNR/dB新方法STD/(°)REV法STD/(°)SNR/dB新方法STD/(°)REV法STD/(°)3231.3029.263228.6026.973419.3818.953418.2316.853611.5110.993610.679.89387.676.94386.155.48405.755.56403.853.41
4 结束语
中继卫星SMA系统相控阵天线的在轨标校与地面阵列标校有很大的区别,它需要充分考虑卫星径向时变位移带来的时变相位干扰,同时考虑到卫星负荷的限制,不能在卫星上安装太多的标校设备,并且要求标校方法尽量简单。常规的标校方法不再适用,因此产生了以REV,CCE,UTE为代表的运动载体相控阵天线标校方法,其中REV法因为实用性较强,获得了更广泛的研究与应用。然而REV需要对所有阵元进行大规模的电场相位旋转,测量时间长、采样次数多、数据处理量大,即要求更多的时间与硬件资源。为了快速有效地进行SMA系统相控阵天线的动态校正,本文提出了一种基于正交四相旋转的新方法,仿真实验证明该方法可以在更短的时间内以更少的测量次数获得与REV法近似的阵列标校结果,因此更适合在星载相控阵天线相关工程实践中应用。
