脑血栓康复训练器的机械结构设计
2020-05-08张崔禹徐朝阳许浩男
张崔禹,徐朝阳,许浩男,陈 雪,刘 通
(北华大学 机械工程学院,吉林 吉林 132021 )
近年来我国脑血栓患者不断增加,相关医疗设施技术也飞速发展.患者通常训练的同时,再以康复机器人辅助,恢复效果极为显著[1].康复机器人对病患进行针对性地训练,能够使下肢运动功能和日常活动能力提高[2].最早进行商业化的康复机器人是三十年前由英国Mike Topping发明的Handy1.最近几年来,我国康复机器人的研制取得突破进展.其中,哈尔滨大学制作的步行康复机器人将机械结构与康复动作结合到了一起[3],浙江大学研制出可以穿戴式的下肢辅助外骨骼结构[4].国内的康复训练主要采用人为辅助训练康复的方式,恢复效率低且存在一定的安全隐患.虽然我国近年来对脑血栓康复机器人的研究进程较快,但是与国外还是存在明显的差距.传统的康复训练设备存在结构复杂、穿戴起来困难、步态训练精度低并且配合协调性差等缺点,在了解现有康复设备存在不足的基础上,设计了脑血栓康复训练器[5],旨在解决穿戴困难、步态训练精度低和协调性差等问题.穿戴简单的安全防护装置对患者起到保护作用,运用单片机编程控制两侧外骨骼按照已设定好的步态进行协调性工作,通过液压缸和电机为轮椅和外骨骼提供动力,使患者在坐立、站立和行走3种形式之间转换,该设计为结构简单、操作方便的脑血栓康复机器人.
1 总体结构设计
1.1 脑血栓康复训练器的总体结构
康复机器人通常需要模拟正常人的行走,同时还能够支撑人体的体重,因此对患者进行康复运动训练时,要求康复机器人具有良好的承载能力[6].脑血栓康复机器人的总体结构如图1所示,采用以折叠式护椅为基座,辅助行走外骨骼为主体框架的新型康复训练一体式机器.康复机器人的辅助行走外骨骼采用以电机和液压系统为动力,模仿人体行走时骨骼和肌肉的伸展和收缩,护椅采用折叠可调式机构,在患者训练完毕后可以将护椅和辅助行走外骨骼收起,实现了一个可调节性的康复医疗环境.为保障安全,训练时利用吊护去固定患者,最后依靠单片机编程控制两侧外骨骼按照已经设定好的步态进行协调性工作.为使患者在不进行训练时辅助行走外骨骼可以简易且方便的收回,设计一款可折叠的护椅,在闲置时可将辅助行走外骨骼安放于护椅内,需要做训练时则通过设置在护椅坐垫下部的液压伸缩缸完成护椅由坐姿向站姿的转变,并通过设置在护椅上的伸缩吊臂为患者提供一定的支撑力.
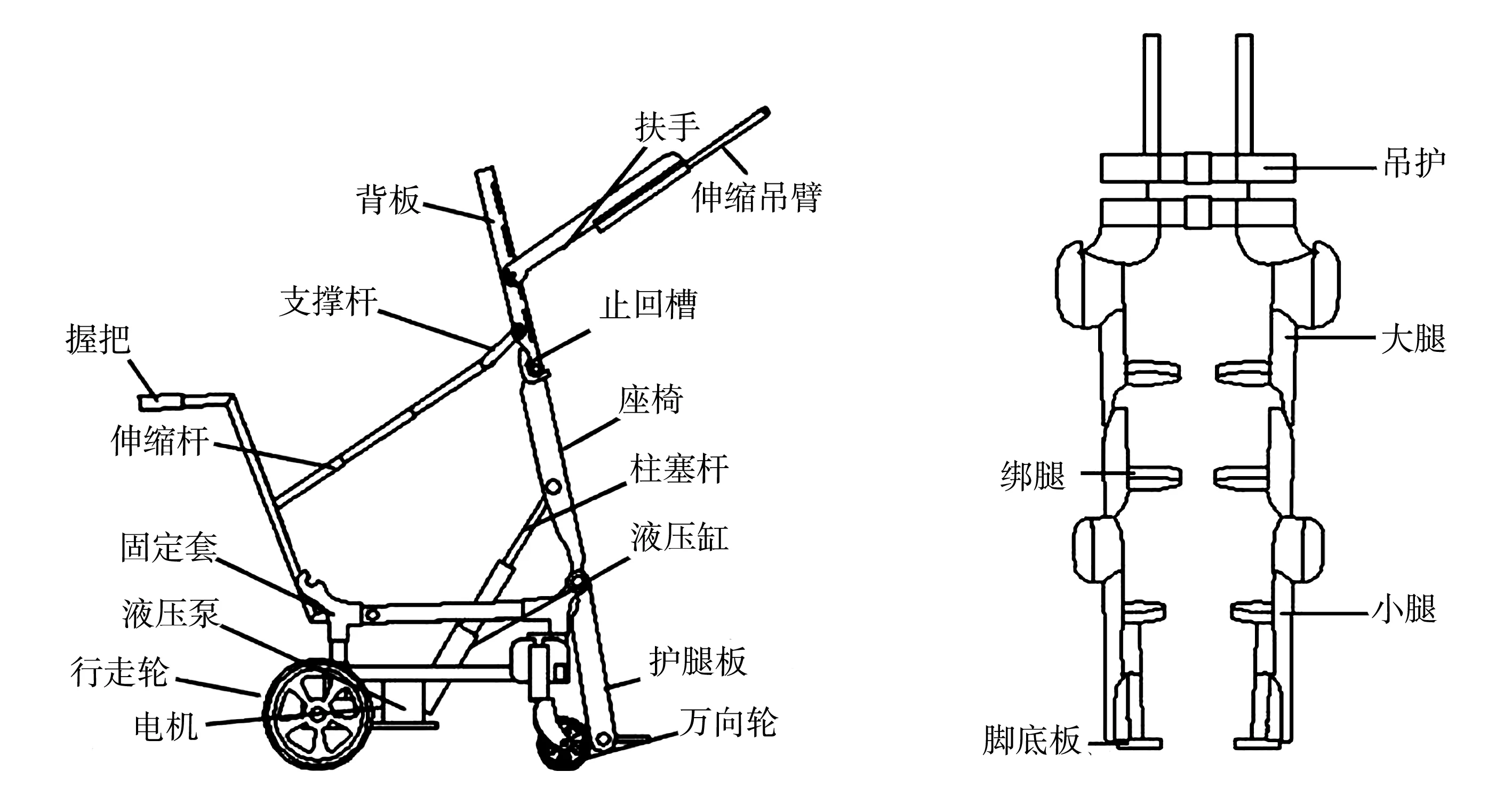
图1 脑血栓康复训练器的整体结构图
1.2 护椅结构设计
护椅框架结构如图2所示,主要由行走机构、本体框架、动力系统以及升降机构组成.为降低整机成本采用横梁搭接形式构建护椅本体框架,本体框架由与行进方向平行的四根横梁,与行进方向垂直的纵梁、竖梁以及设置在固定杆下方的底盘,横竖梁角接处利用固定套连接.底盘供安装电机,液压泵以及伸缩缸使用.行走机构主要由后置行走轮和前置万向轮组成,为减轻能源消耗,采用人力推动方式实现护椅的前进或转向.
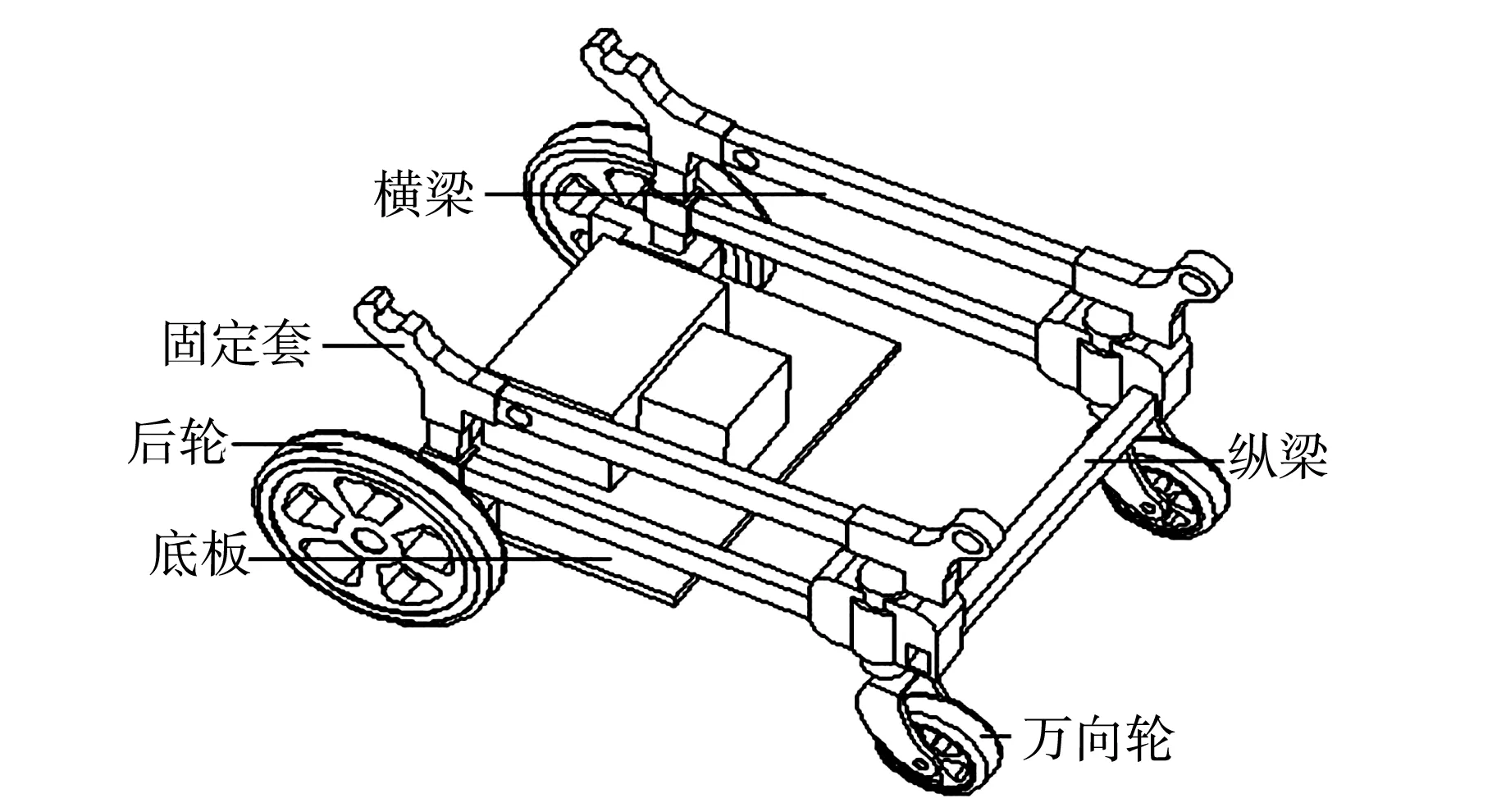
图2 护椅框架示意图
2 外骨骼装置设计
2.1 外骨骼装置尺寸设计
人体下肢因个体原因存在着非常大的差异,因此在设计外骨骼时要考虑其尺寸应与人体下肢尺寸的相互配对,从而提高外骨骼的穿戴舒适性.表1、表2是我国18~60岁男性和女性的下肢主要尺寸统计[7].

表1我国18~60岁男性下肢主要尺寸统计 (单位:mm)
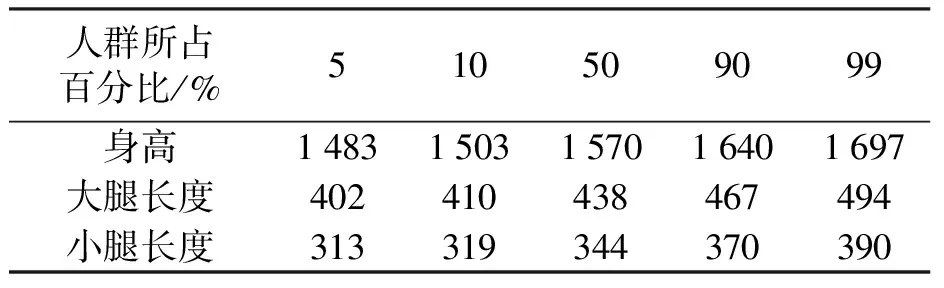
表2 我国18~60岁女性下肢主要尺寸统计 (单位:mm)
2.2 外骨骼装置结构设计
外骨骼装置结构如图3所示.
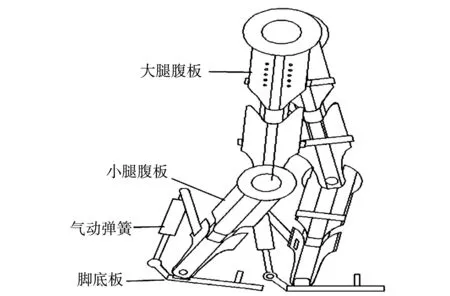
图3 外骨骼整体结构图
外骨骼固定在人腿的两侧,利用贴在腰部的单片机检测身体高度,计算步伐,控制电机驱动外骨骼运动[8],以辅助腿部行走的动作.脑血栓康复机器人外骨骼主要由大腿部件、小腿部件以及足部部件组成,整个外骨骼装置的部分重量能通过大腿腹板传递至小腿腹板,再通过小腿处腹板上的承力杆传递到气动弹簧上,气动弹簧再将重力传递至脚底板,最后由脚底板传至地面.
大小腿部件均由上下两块腹板以及对应关节处的电机组成,大腿部上腹板一端与电机输出轴相连,在电机转动的同时带动腹板转动,实现髋关节的活动.大腿部的下腹板一端和小腿部上腹板以及电机相连,电机与大腿下腹板底端固定连接,电机转动带动小腿上腹板转动,实现膝关节的活动[9].大小腿腹板处设有束腿绷带来固定腹板位置,使腹板不会与使用者下肢相应部位发生相对移动,且柔性绷带能满足大部分使用者腿部周向尺寸,具体结构如图4所示.

图4 大腿和小腿结构示意图
为满足不同下肢尺寸的使用者穿戴,将大小腿腹板设置为可调节结构.大腿部上下两腹板通过两根光杠连接,光杆与下腹板固定连接,与上腹板内孔相互配合,通过光杠在上腹板内孔中的滑动使下腹板与上腹板的相对位置发生变化.大腿部下腹板上设有顶珠、圆柱槽、弹簧等结构,图5为长度调节原理示意图.小腿部下腹板的光杠上设有相同结构,通过按压顶珠压缩弹簧使顶珠跟随光杠在上腹板孔内滑动来调节大小腿上下腹板的相对距离.
图5 长度调节原理示意图
外骨骼结构部件均采用腹板结构,腹板横截面为月牙形,保证在使用者穿戴时腹板月牙形内凹面与使用者大腿或小腿外侧贴合.内部结构采用中空设计,以尽量减轻外骨骼重量.图6为外骨骼腹板截面示意图.

图6 外骨骼腹板截面
2.3 吊护装置结构设计
调户装置结构如图7所示,吊护装置主要采用了背心穿戴式结构,由于人体盆骨的差异,吊护下端采用柔性体材料制成并与髋关节处电机固定连接,使吊护紧贴盆骨处肌肉.当髋关节处电机转动时,电机所产生的扭转力能通过紧贴盆骨处肌肉的吊护传递至设置在吊护后面的承力板,承力板具有一定弧度,与腰部通过两根腰带固定.承力板将力最终传递给腰部区域.腰带与承力板通过两根肩带在纵向范围内连接.吊护还包括了与护椅伸缩吊臂连接的吊带,吊带一端与吊护上部腰带两侧连接,另一端与护椅上伸缩吊臂连接.在不使用时吊带可从伸缩吊臂以及腰带上拆卸下来.
图7 吊护结构示意图
3 康复训练模式转换的设计
3.1 液压支撑结构设计
护椅的折叠及辅助行走外骨骼踝关节的活动均是采用液压系统来完成.踝关节的活动范围小,对于踝关节的准确控制显得非常重要.液压系统具有体积小、精度高、响应快的特点,均符合踝关节的动作要求.另外护椅伸缩的过程需要承受重载,液压系统相比于电动以及机械驱动更为合适.利用设置在护椅本体框架下方的电机以及液压泵为整个液压系统提供动力,电机带动液压泵使电力转换为液动力.采用分别设置在辅助行走外骨骼足部部件上的双作用一级伸缩缸以及设置在护椅伸缩机构中的双作用两级伸缩缸作为整个液压系统的执行元件.辅助行走外骨骼的双作用一级伸缩缸控制踝关节的转动,踝关节是人体距地面最近的负重关节,需承受较大的力,需要伸缩缸的控制精度高,避免损伤使用者的踝关节.而护椅伸缩机构中的双作用两级伸缩缸控制着护椅坐姿与站姿的转换,行程大、作用力大,控制精度相对来说不需要太高,因此两者间不能共用一个液压泵,需采用双泵供油形式.如图8所示为液压支撑回路原理图.
图8 液压支撑回路原理图
3.2 行走模式的转换设计
在康复过程中,除了器械的辅助治疗有着极其重要的作用外,患者的医疗环境对康复效果也起到一定的影响.由于国内的康复训练设备多采用悬挂式康复机器人,机器人功能齐全,但整个机器人是设置在跑步机上的,这使得整个机器人体型庞大无法移动且增加了成本,病人常常需要到指定的地方进行康复训练,训练环境较为封闭.长期的治疗对于病人来说会产生心理压力,不利于患者康复训练.
为解决上述问题,使护椅与外骨骼辅助行走相结合,外骨骼可安放于护椅内,需要训练时则可以通过设置在护椅坐垫下部的液压伸缩缸完成护椅由坐姿向站姿的转变,如图9所示.为降低整机成本采用横梁搭接形式构建护椅本体框架,本体框架由与行进方向平行的四根横梁,以及与行进方向垂直的纵梁、竖梁组成,横竖梁角接处利用固定套连接.
伸展机构主要由扶手、伸缩吊臂、座椅、背板、护腿板、通轴、伸缩杆、支撑杆及脚踏板等组成,通轴设置在坐垫下端与液压系统的活塞杆铰接,动力系统采用的是电机驱动液压泵产生液动力,再将动力传递给液压缸使活塞杆在液压缸内作往复运动的形式,从而实现伸展机构的伸缩.当护椅处于坐姿状态时,支撑杆处在固定套上C形槽内,为背板提供支撑力.坐椅一端与背板的两侧通过嵌套式连接,另一端通过固定套实现与护腿板的嵌套连接、护腿板与框架固定连接.座椅在活塞杆的作用下以与护腿板连接处为中心,发生相对于本体框架的转动,通过控制活塞杆的活动行程来控制座椅的角度转动范围.由于背板与座椅上端铰接,且在连接处设有L型止回卡槽.座椅在转动时会使背板在力的作用下同时转动,在背板转动到一定角度时与设置在座椅上端部的止回卡槽端面接触,此时座椅与背板在同一平面,在活塞杆的继续作用下直至护腿板、座椅及背板在同一平面时停止,液压缸处于最大行程状态且存在保压压力以至于座椅不会发生回转,维持座椅站姿状态的稳定.伸缩杆分别与握把以及支撑杆铰接,支撑杆与背板固定连接,其作用主要在于使患者在使用时作用在伸缩吊臂上的力不会使背板发生倾覆.背板两侧设有供使用者摆放的,通过调节螺母调节扶手与座椅的相对角度,从而调节设置在扶手下端的伸缩吊臂顶端与地面的高度,满足不同身高使用者需求的目的.
图9 护椅姿态转变过程
3.3 数据分析与仿真结果
对正常人的步态进行分析,总结出步态规律,依靠单片机编程进行协调工作.下肢步行行走是一个具有周期性的动作,即同一个脚后跟连续两次与地面接触时间隔的时间差.在一个步态周期内进行各关节理论参数分析.作人体运动的简化模型,如图10所示.
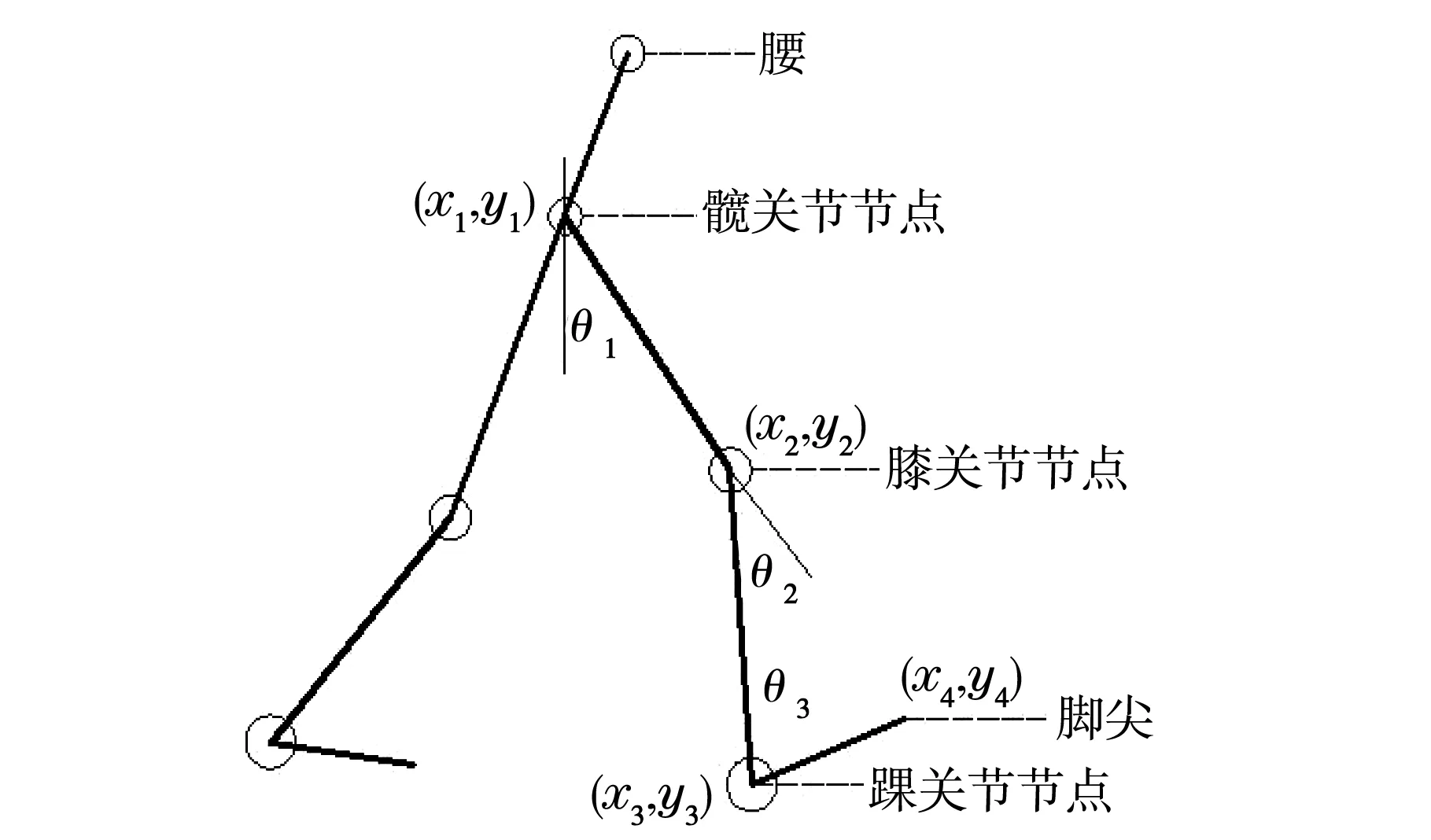
图10 下肢运动简化模型
将人体髋关节、膝关节、踝关节及脚尖等4个部位分别用4个点表示,其在平面内的坐标值分别为(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4).通过4个点位置的运算和分析,可以得到髓关节、膝关节和踝关节的角度变化情况.
由髋关节节点和膝关节节点位置的坐标值可以推出髋关节的角度值公式:
(1)
式中θ1表示髓关节的角度值.
由膝关节节点和踝关节节点位置的坐标值及髋关节角度值θ1,可以推出膝关节的角度值公式:
(2)
式中θ2表示膝关节的角度值.
由膝关节节点和踝关节节点及脚趾位置的坐标值可以推出踝关节的角度值公式:
(3)
式中θ3表示踝关节的角度值.
仿真:在三维建模软件CATIA中构建简化的外骨骼模型,将建好的模型保存为stp格式的文件导入ADAMS中.在ADAMS中对外骨骼进行速度设定并仿真,为满足要求,可以选择“Define Mass By User Input”,设定外骨骼的质量;按照行走方式设置各关节的约束;把行走面与大地固连;修改外骨骼脚底与支撑面间的硬度、渗透度及粗糙度[10].基于“脑血栓康复训练器”所有参数都是基于模拟环境的确定,通过ADAMS进行装置动力学仿真.运用理论知识分析了各机构设计参数[11],得出装置运动时的相关参数,在实验中对系统性能进行调整.使传动系统最大限度地满足工作环境需求,反复对整个装置进行试验校核,根据工作环境的突发状况做出最大的考虑,使装置更加平稳地运行,在满足患者训练需求的同时,对系统进行相应的简化工作.为提高装置的实现程度、患者训练时和不训练时对液压系统和电机的要求,对整个装置进行了ADAMS仿真测试,得出数据.图11为整个装置通过仿真分析得出的机器人辅助患者进行训练时的分析曲线.图11(a)为脑血栓康复训练器行走时两脚的运动状态曲线.图11(b)为脑血栓康复训练器其中一只脚底板的运动速度和加速度.可以了解到运动状态曲线较为平衡,两脚运动总体变化相差不大,整个机构运行平稳,在可接受范围内,说明了理论模型的正确性.速度与加速度的仿真分析通过运动方程计算,得到的膝、踝关节的位姿与仿真结果基本吻合,可得出无卡点、死点,运行平缓,适合康复训练.
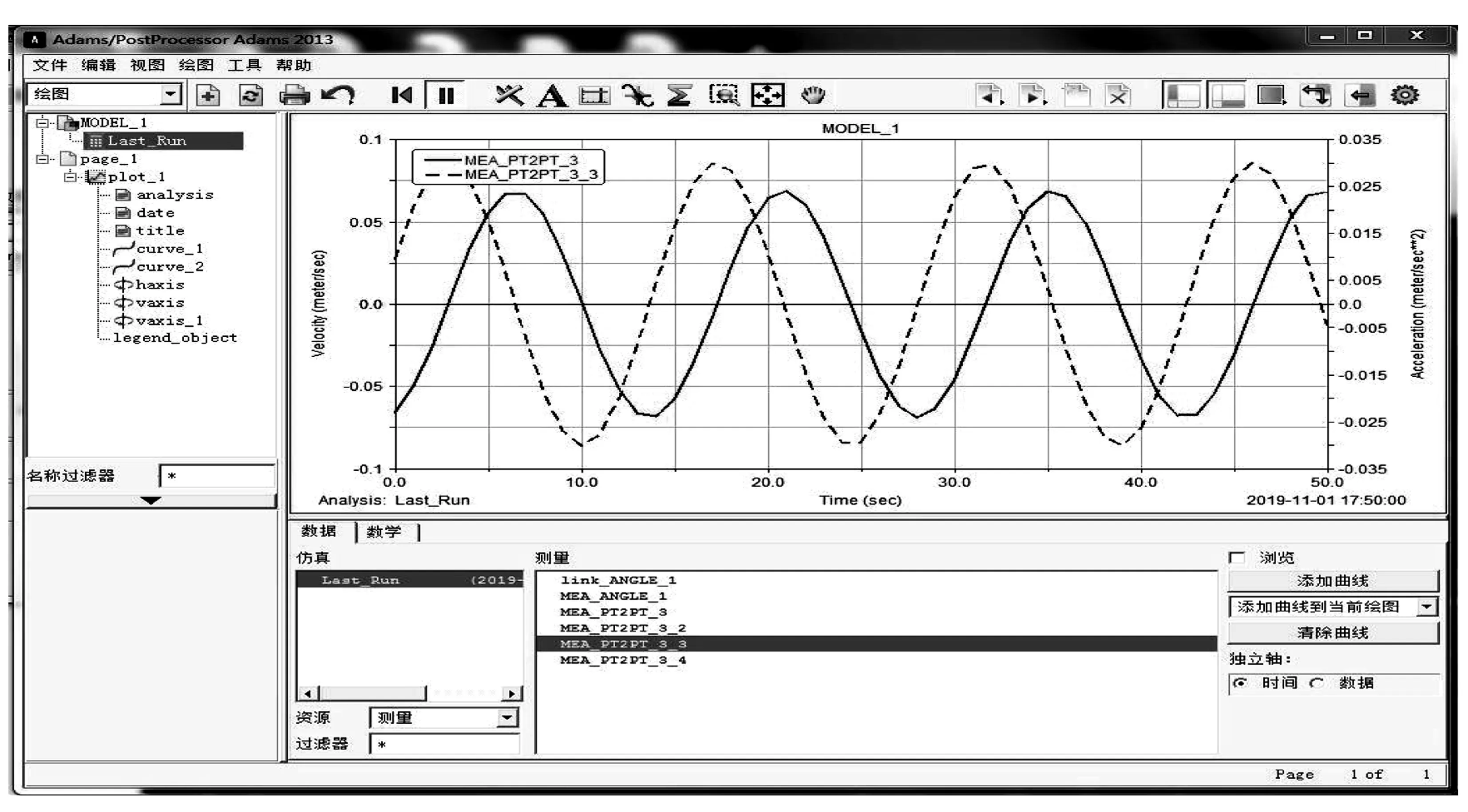
(a)

(b)图11 脑血栓康复训练器运行时的仿真分析曲线
4 结 论
研究了脑血栓患者的病理特点和康复训练方法,设计了一款基于辅助行走外骨骼的脑血栓患者康复训练机器人.训练时,为保证病人在被动训练时能“自主”站立行走,采用电动方式以及相应的机械结构分别模仿人类腿部肌肉和骨骼,实现髋关节、膝关节及踝关节的“自主”活动,可协助脑血栓患者完成坐姿与站姿之间的相互转换.根据对人体行走步态的分析,设计了辅助行走外骨骼,使病患在站立的情况下,利用外骨骼进行行走模式的康复训练.
(1)脑血栓患者康复机器人将轮椅与辅助行走外骨骼相结合,可让患者不局限于室内环境,为使用者的训练带来便利,且扩展了使用者的训练空间.
(2)辅助行走外骨骼机构中大小腿外骨骼采用光杠、圆柱槽、弹簧以及顶珠等结构使其长度可调,以满足不同腿长的患者使用,同时采用了电动形式实现对髋膝关节和踝关节的驱动控制,使训练过程更加平稳可靠.
(3)脑血栓患者康复机器人的护椅采用可折叠式设计,利用液压系统和升降机构实现护椅由坐姿向站姿的转换,使护椅更具有多功能性.
(4)吊护采用背心式穿戴设计,吊护底端与大腿处外骨骼上端部与相连,另一端与设置在护椅上的可伸缩扶手相连,当护椅处于站立状态时,扶手撑托起吊护,使患者能通过外骨骼接触到地的同时而又不会发生倾覆,保障使用者安全.
